1.School of Physics and Optoelectronic Engineering, Xidian University, Xi'an 710071, China 2.State Key Laboratory of Applied Optics, Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences, Changchun 130033, China
Fund Project:Project supported by the China Postdoctoral Science Foundation (Grant No. 2017M613063), the Fundamental Research Fund for the Central Universities, China (Grant No. JB170503), the State Key Laboratory of Optical Technology for Applied Optics, Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences (Grant No. CS16017050001), and the Young Scientists Fund of the National Natural Science Foundation of China (Grant No. 61705175).
Received Date:18 December 2018
Accepted Date:15 January 2019
Available Online:01 April 2019
Published Online:20 April 2019
Abstract:Imaging systems with a wide field-of-view (FOV) and high-resolution, which can provide abundant target information, are always desired in various applications including target detection, environment monitoring, marine rescue, etc. Various approaches to realizing the wide FOV and high-resolution imaging have been developed, for example, fisheye lens imaging system, and panoramic optical annular staring imaging technology. In these single aperture imaging systems, the maximum resolution and FOV are determined by either the geometric aberration or the diffraction limit of the optics. Multi-scale monocentric ball-lens imaging system is of particular importance due to its high real-time ability, small image distortion, and wide FOV. The complete geometrical symmetry of multilayer monocentric ball-lens makes it possible to compensate for the geometric aberration with no need of additional assistance. However, the major problem in designing imaging system based on multi-scale monocentric ball-lens is that there are too many variables needed to be set for a ball-lens imaging structure and the problems of high time cost and computation complexity.For simplifying the design process, in this manuscript, we apply the computational imaging theory to optical system design, thereby developing a geometric aberration optimization function to determine the initial values of the desired system by the sound computation rather than repetitive iterations by using the optical system design software. Function development starts from the aberration theory. Since the monocentric ball lens does not bring in the aberrations relating to FOV, only spherical aberration and chromatic aberration are needed to be considered. The optimization function is then founded according to the principle of minimizing the spherical aberration and chromatic aberration. And then with the determined initial parameters, ZEMAX is employed to globally optimize the residual geometric aberrations, which is time-efficient. After required parameters are finally determined, the system performance is evaluated via the modulation transmission function, the spot diagram distribution, the field-curve and distortion value and the ray fan curve. Favorable results are obtained, which demonstrates the feasibility of the developed system designing approach. Imaging results from the finished prototype system are pretty satisfactory with wide FOV and high resolution which is captured through only one frame. The multi-scale wide FOV and high-resolution computation imaging system not only solves the conflict between the wide FOV and high resolution, but also provides the research foundation for computational imaging. Keywords:wide field of view and high-resolution imaging system/ computational imaging/ optical system design/ multi-scale imaging
 图 1 基于共心球透镜的广域高分辨率成像原理图
图 1 基于共心球透镜的广域高分辨率成像原理图


















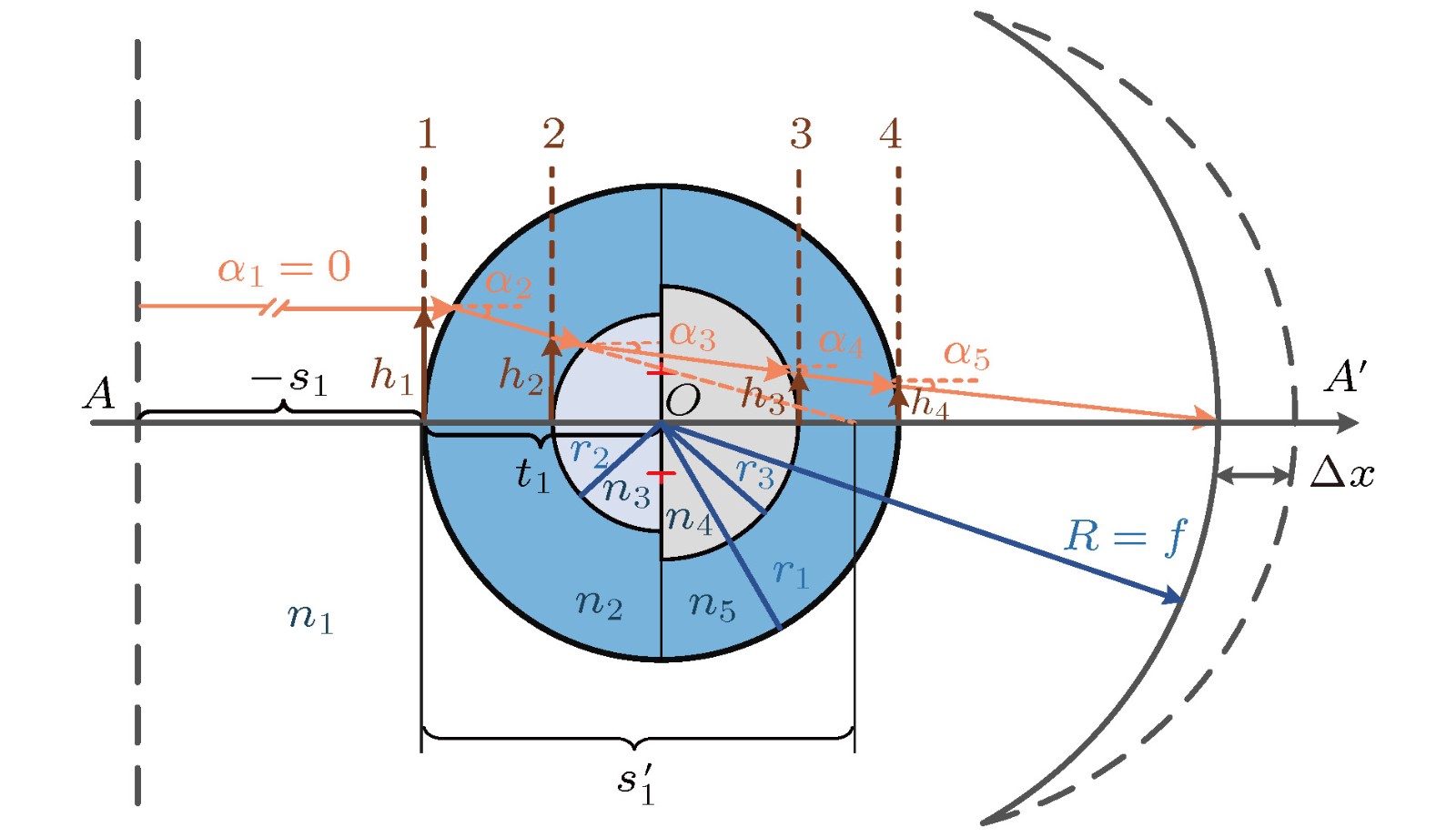 图 2 共心球透镜成像光路图
图 2 共心球透镜成像光路图



















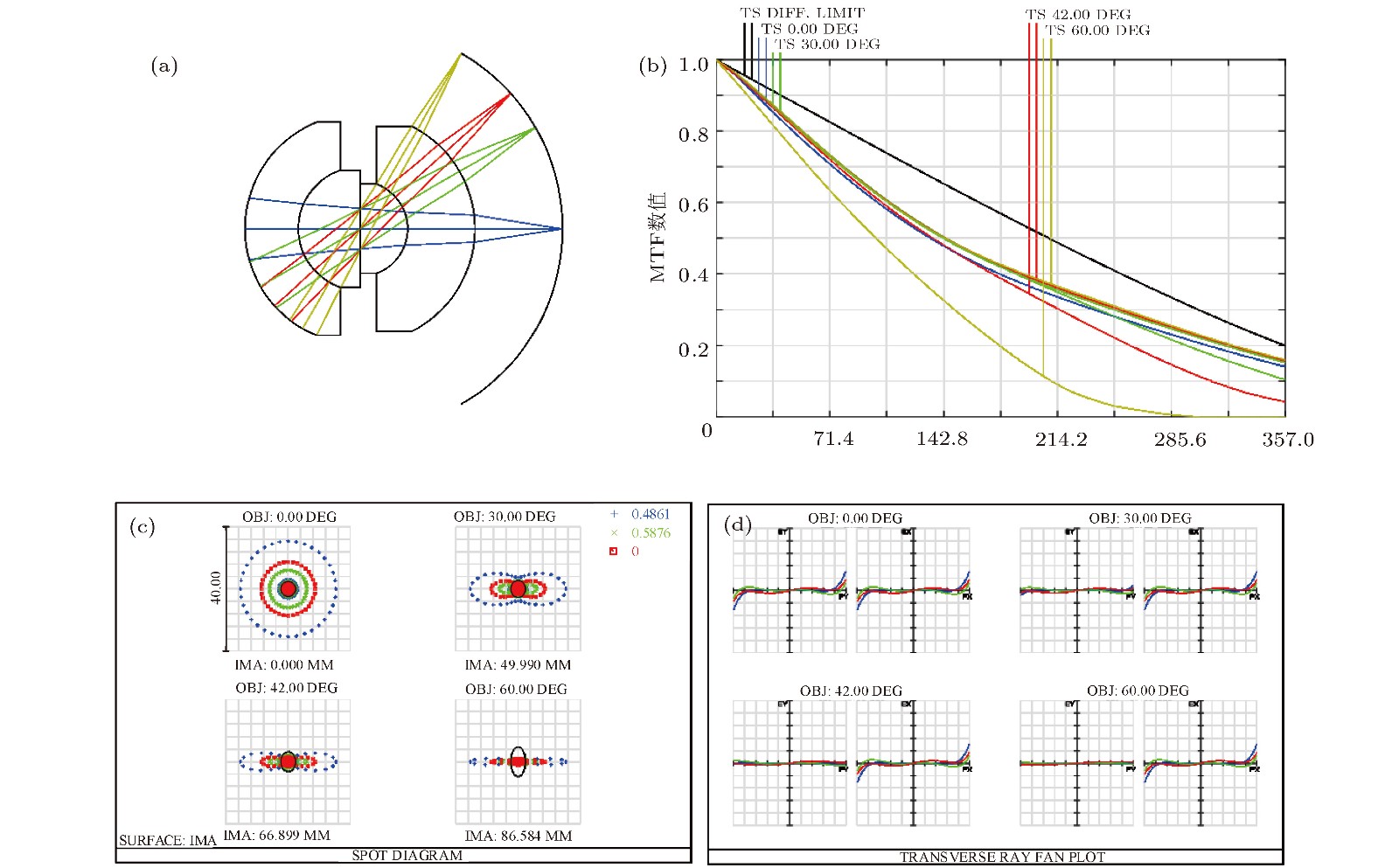 图 3 (a)共心球透镜二维成像结构图; (b)调制传递函数曲线图; (c)共心球透镜点列图; (d)共心球透镜光线像差图
图 3 (a)共心球透镜二维成像结构图; (b)调制传递函数曲线图; (c)共心球透镜点列图; (d)共心球透镜光线像差图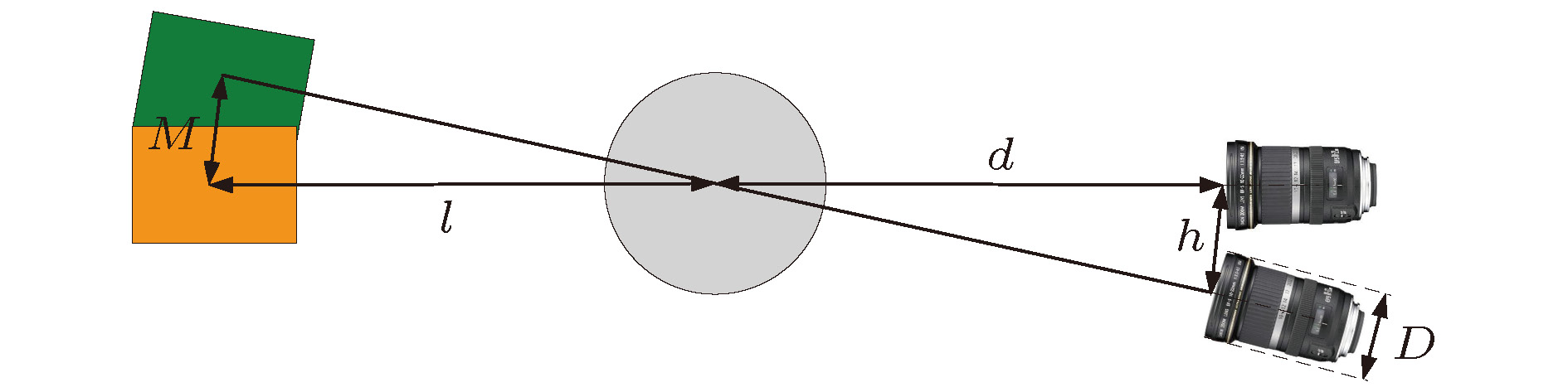 图 4 相邻小尺度相机视场重叠对应关系示意图
图 4 相邻小尺度相机视场重叠对应关系示意图

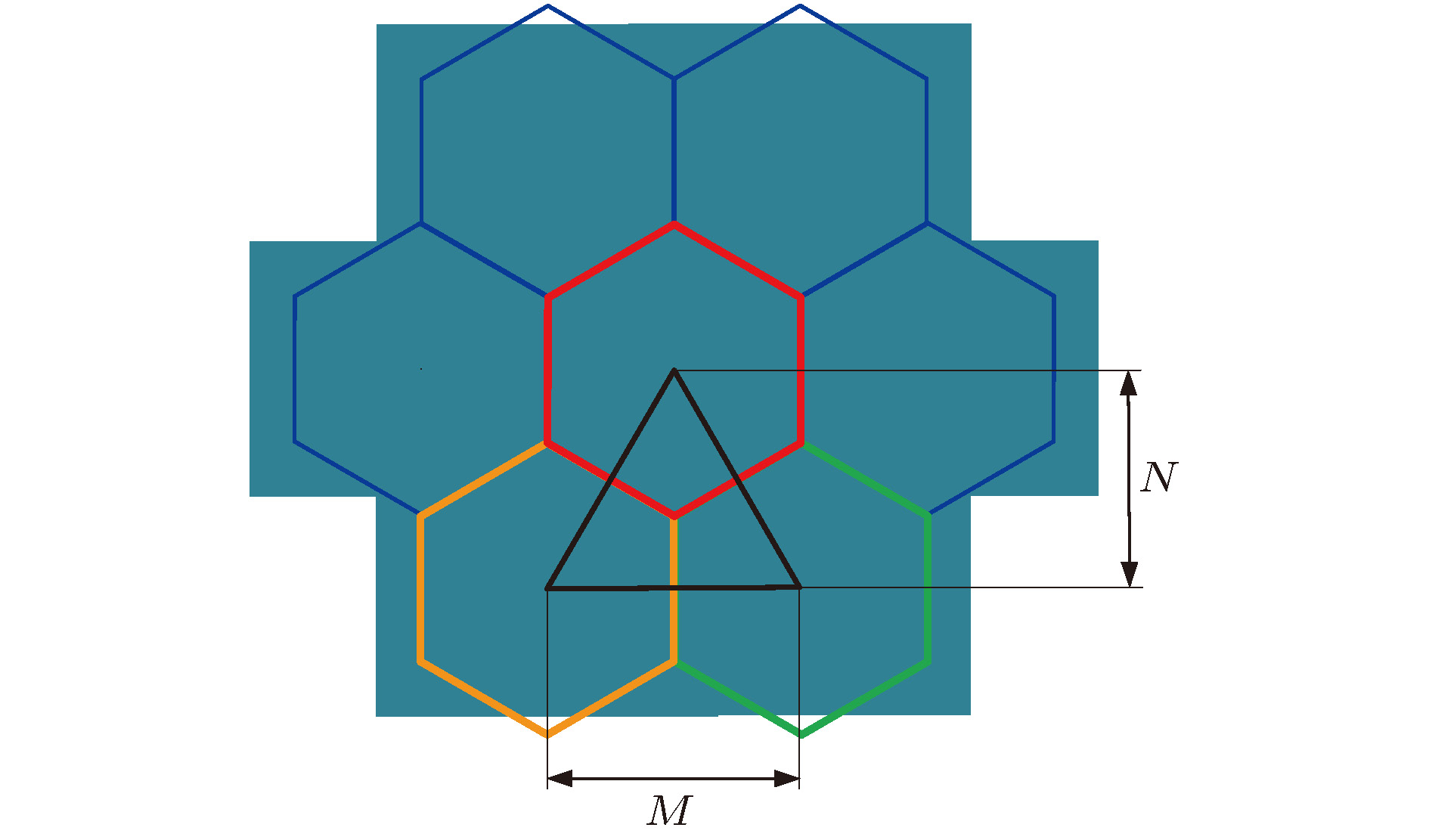 图 5 小尺度相机排布示意图
图 5 小尺度相机排布示意图














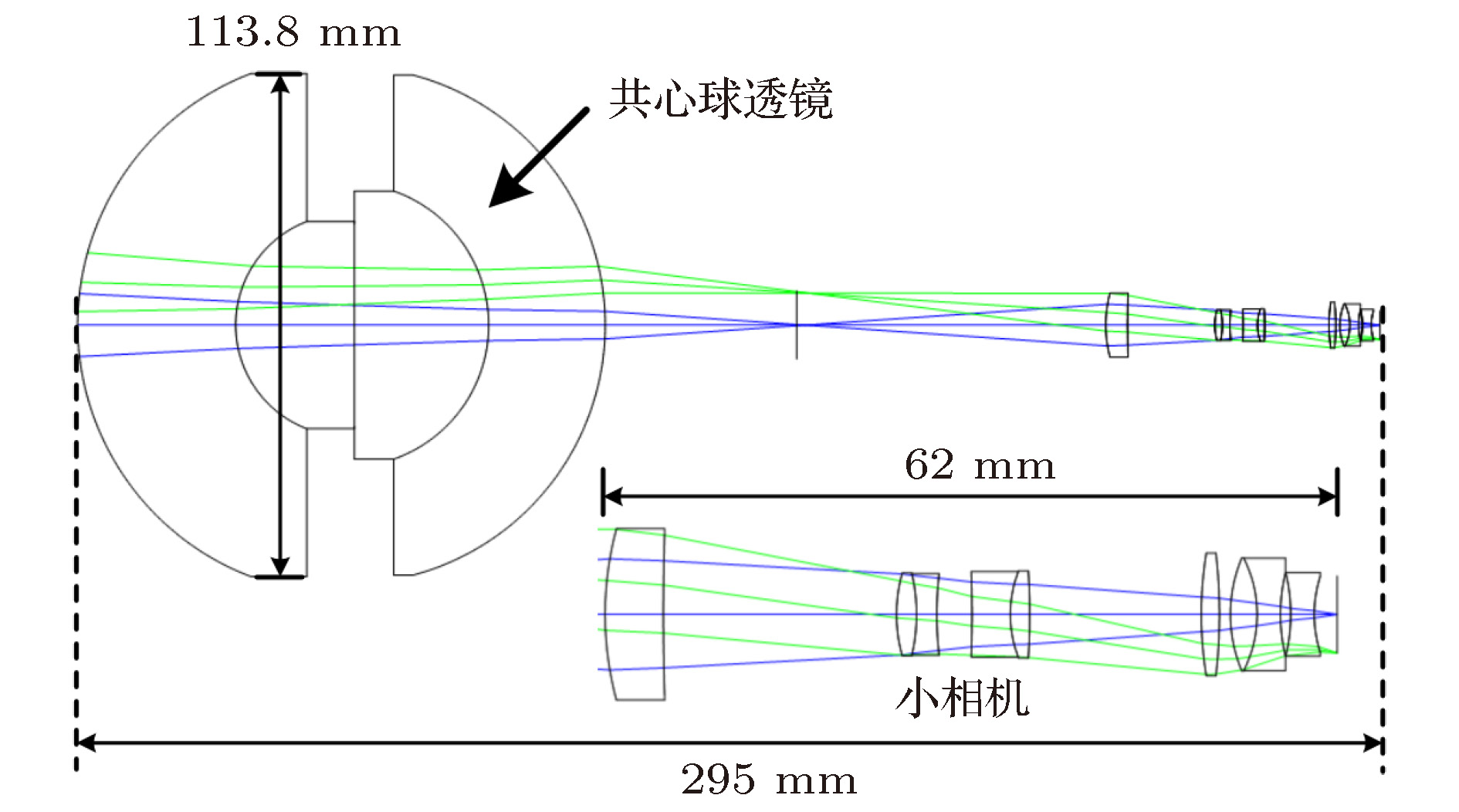 图 6 光学系统结构图
图 6 光学系统结构图

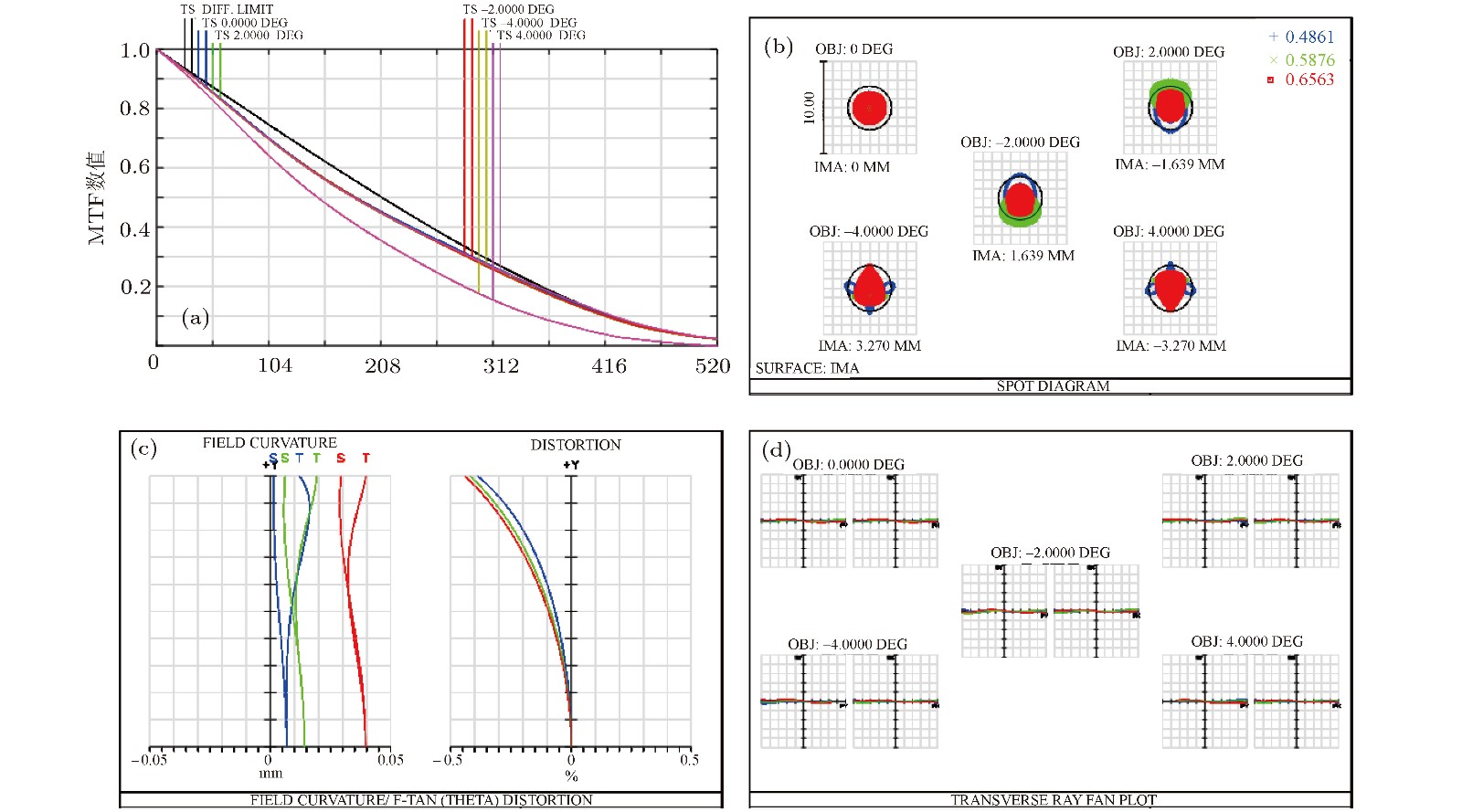 图 7 (a)系统MTF曲线图; (b)系统点列图; (c)系统场曲和畸变图; (d)系统光线像差图
图 7 (a)系统MTF曲线图; (b)系统点列图; (c)系统场曲和畸变图; (d)系统光线像差图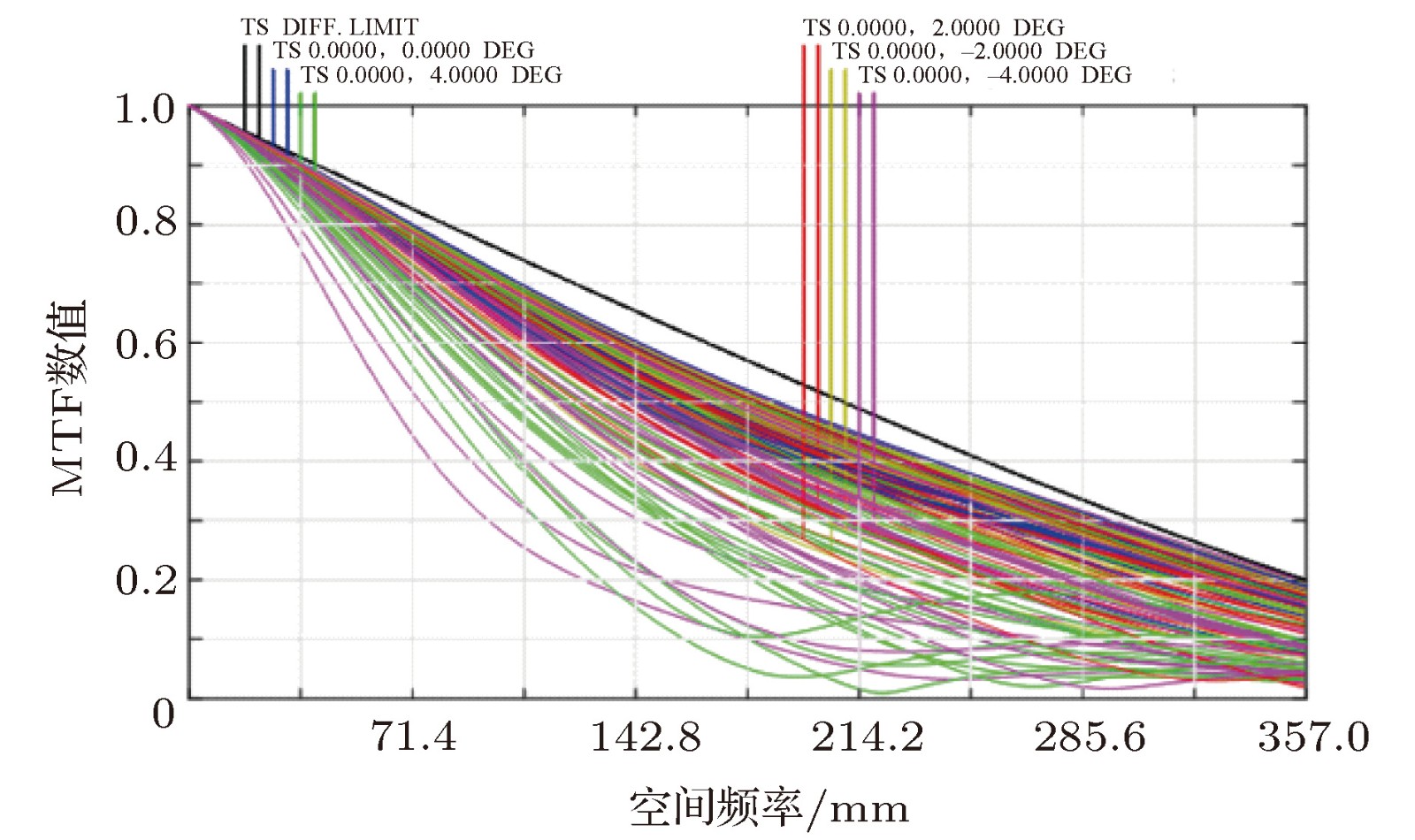 图 8 不同公差分配时的MTF叠加曲线
图 8 不同公差分配时的MTF叠加曲线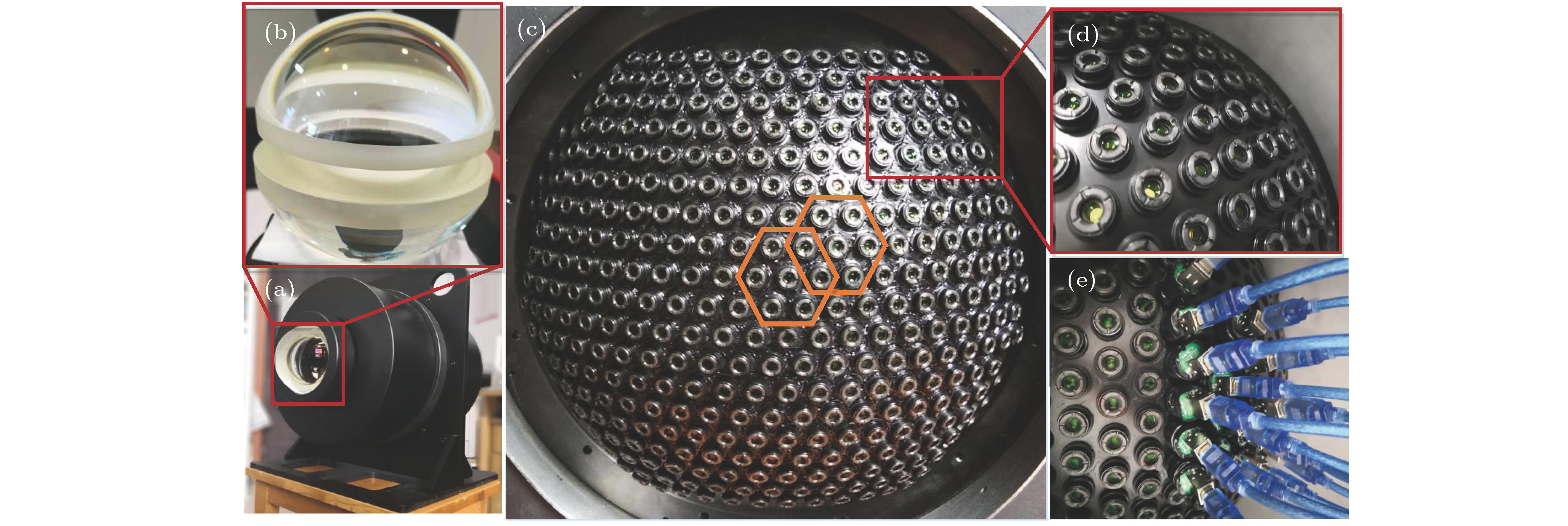 图 9 多尺度广域高分辨率计算成像系统结构图
图 9 多尺度广域高分辨率计算成像系统结构图 图 10 (a)测试平台结构示意图; (b)测试平台实物; (c)靶标板图像; (d)分辨率图案参数表
图 10 (a)测试平台结构示意图; (b)测试平台实物; (c)靶标板图像; (d)分辨率图案参数表 图 11 系统成像效果图(部分)
图 11 系统成像效果图(部分)