1.Key Discipline Laboratory of Intelligent Ammunition Technology National Defense, Nanjing University of Science and Technology, Nanjing 210094, China 2.Changshu Research Institute Co.Ltd, Nanjing University of Science and Technology, Changshu 215513, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant No. 51709147) and the Fundamental Research Fund for the Central Universities, China (Grant Nos. 309171B8805, 30918012201).
Received Date:16 October 2018
Accepted Date:04 February 2019
Available Online:23 March 2019
Published Online:05 April 2019
Abstract:Aiming at the high requirement for pulse-repetition frequency of the existing single-beam synchronous scanning circumferential detection, which is difficult to use practically. The method of single-beam expanding scanning laser circumferential detection is proposed. Based on the principle of single-beam expanding scanning laser circumferential detection, the mode of scanning has an inherent defect of periodic detection blind area in the detection field. The method of one-way spreading laser line beam into fan-shaped beam is proposed. The analytical expression of the lowest scanning frequency and the pulse frequency are derived. Echo characteristics of cylindrical target and the section attenuation coefficient are analyzed. Mathematic model of cylindrical target echo power of pulsed expanding laser beam is established. The mathematical model of section attenuation coefficient of cylindrical object is established, and the variation of the section attenuation coefficient when the center line and the edge of the beam have different positions relative to the cylindrical target is analyzed. The expression of the position having the smallest section attenuation coefficient and the expression of largest angle between the adjacent pulse laser beams are obtained, then the influence of system parameters on the section attenuation coefficient is also discussed. The emphasis is placed on the influence of pulse frequency, beam angle and incidence angle on the ability to detect different diameter targets. As the laser pulse frequency increases, the detectable target diameter is smaller and the detection ability is stronger. Increasing the beam angle and lowering the laser incident angle are beneficial to reducing the minimum laser pulse frequency required to discover the target. The methods of calculating maximum beam angle and minimum pulse frequency under typical conditions of the detection system are presented. When the incident angles are ${\text{π}}/3$, ${\text{π}}/4$ and ${\text{π}}/6$, the maximum beam angle and the lowest pulse frequency are calculated for a cylindrical target with a diameter of 0.18 m at a detection distance of 6 m, the minimum pulse frequency decreases effectively after beam expansion. The results show that the pulse repetition frequency will be effectively reduced by slightly expanding the beam. This study may provide theoretical basis for designing and optimizing the single-beam pulsed laser circumferential detection. Keywords:single-beam expanding scanning laser circumferential detection/ cylindrical target echo characteristics/ laser expanding/ pulse frequency
激光束与系统纵轴成$\alpha_t$角度出射, 与目标夹角$\alpha$, 激光束扫描周期为T, 在一个扫描周期内目标沿相对速度方向从A位置运动到B位置, 弹体速度为vm, 目标速度为vt. 基于周向扫描探测系统的工作原理, 在一个扫描周期中由多条激光束共同构成周向光束场, 从x轴正方向观察一个扫描周期内的脉冲光束如图3所示. 图 3 沿x轴正方向脉冲光束视图 Figure3. Pulse beam view in the positive direction of the x-axis.
式中第一项为镜面反射分量, 第二项为漫反射分量, $\alpha$为激光入射角. 由图2可知激光入射角为光束发射角与目标之间的夹角, 当探测系统与目标平行交会时有$\alpha = {\alpha _{\rm{t}}}$. A, B, s, m是由目标表面材质决定的待定系数, 其中A为镜面反射幅度, B为漫反射幅度, s为表面倾斜系数, m为漫反射系数. 目标表面为涂白漆铝板, 拟合得到的参数为A = 0.3, B = 0.25, s = 0.25, m = 1[11]. 目标在视场角方向的辐射强度为
$I\left( R \right) = {{{f_{\rm{r}}}\phi \left( R \right)} / {\text{π}}}, $
圆柱目标表面激光回波功率方程为
${P_{\rm{r}}} = \frac{{I\left( R \right){A_{\rm{r}}}}}{{{R^2}}} = \frac{{{P_{\rm{t}}}\eta K\left( R \right){{\rm{e}}^{ - 2\sigma R}}{f_{\rm{r}}}{A_{\rm{r}}}}}{{{\text{π}}{R^2}}}, $
式中Pr表示接收功率, Pt表示激光器发射功率, $\sigma $代表大气衰减系数, Ar代表接收机光学系统孔径面积. 由(15)式可知回波功率与K(R), R和${\alpha _{\rm{t}}}$有关, 截面衰减系数K(R)随着激光束与圆柱目标的位置变化在[0, 1]内变化. 假设激光器发射功率为70 W, 大气衰减系数为0.00054 m–1[21], 圆柱目标表面激光回波功率与K(R), R, ${\alpha _{\rm{t}}}$的关系如图6(a)—图6(c)所示. 从图6(a)可知, 当截面系数恒定时, 目标回波功率随着探测距离增加在急剧减小, 当0 < R < 3 m时, 回波功率下降迅速; 3 < R < 10 m时, 回波功率随着探测距离增加下降速度减缓. 同时从图6(a)可知, 在探测距离一定时, 回波功率随截面衰减系数增加而增加. 当R = 6.7 m, 截面衰减系数K(R) = 0.1时, 回波功率小于最小探测功率. 因此在一定的探测距离内, 增加截面衰减系数值可以有效增大回波功率. 对比图6(a)—图6(c)可得, 当探测距离和截面衰减系数相同时, 回波功率随着激光入射角的增大而减小, 因此减小激光入射角有利于提高系统回波功率. 但是激光入射角太小会降低目标捕获概率, 因此选择合适的激光入射角对目标捕获十分重要. 图 6 回波功率Pr与K(R), R, $\alpha$之间的关系 (a) ${\alpha _{\rm{t}}}={\text{π}}/6$; (b) ${\alpha _{\rm{t}}}={\text{π}}/4$; (c) ${\alpha _{\rm{t}}}={\text{π}}/3$ Figure6. The echo power with different K(R), R and $\alpha$: (a) ${\alpha _{\rm{t}}}={\text{π}}/6$; (b) ${\alpha _{\rm{t}}}={\text{π}}/4$; (c) ${\alpha _{\rm{t}}}={\text{π}}/3$
23.2.截面衰减系数K(R)的数学模型 -->
3.2.截面衰减系数K(R)的数学模型
目标回波功率低于系统最小探测功率激光引信无法探测到目标. 计算满足系统最小探测功率的最大$\xi$及最大$\theta$值需要对探测过程中激光扩束后部分照射造成的截面衰减系数K(R)进行分析. K(R)数学模型如图7所示. 如图7(a)所示, 在投影面M上光束中心线与omym轴夹角为${\xi _1}$, 假设光束左边沿线与目标圆总是有交点. 当光束中心线在位置1时, 即$ 0 < $$ {\xi _1} < \arcsin ({{{D_{\rm{t}}}} / {2{r_{\rm{d}}}}})$, 若光束右边沿线与目标圆同样有交点, 则$K\left( R \right) = 1$, 若光束右边沿线与目标圆没有交点, 有${1 / 2} < K\left( R \right) < 1$; 当光束中心线在位置2, 即与目标圆相切时, $ {\xi _1} \!=\! \arcsin \left( {{{{D_{\rm{t}}}} / {2{r_{\rm{d}}}}}} \right),K\left( R \right) \!=\! $$ {1 / 2}$; 当光束中心线在位置3时, 即$\arcsin \left( {{{{D_{\rm{t}}}} / {2{r_{\rm{d}}}}}} \right) <$$ {\xi _1} < {{\text{π}} / 2}$, 有$0 < K\left( R \right) < {1 / 2}$. 光束中心线在位置3处, 即K(R)取值范围最小时, 得到光束左边沿线与目标圆总是有交点的探测情况系统最小回波功率. 光束左边沿线f1与目标圆相交于两点, 取靠近原点om的交点A, 过A点做光束中心线f3的垂线, 交切线ft于点C, 交f2于点B, 交f3于O’点, 在位置1和位置3的光束截面AO’B如图7(b)所示. 图 7K(R)数学模型 (a)光束中心线位置示意图; (b)光束左边沿线与目标相交时K(R)模型; (c)光束左边沿线与目标相离时K(R)模型 Figure7. Mathematical model of K(R): (a) The position of the center line of the beam; (b) the K(R) model when the left side of the beam intersects the target; (c) the K(R) model when the left side of the beam is separated from the target.
表2计算最低脉冲频率及光束角系统参数 Table2.Calculate the minimum pulse frequency and beam angle system parameters
图10(a)表示同一${\xi _1}$值下, f1与目标圆总有交点和没有交点时, $\theta_{\rm{d}}$与回波功率的关系曲线, 中心线左侧曲线对应f1与目标圆总有交点, 右侧对应f1与目标圆没有交点, 图10(b)为不同${\xi _1}$值下$\theta_{\rm{d}}$与回波功率的关系曲线, 如图10(b)所示, 回波功率随${\xi _1}$增大而减小, 以最小探测功率为界可以把曲线分为三类, 第一类为f1与目标圆总有交点时存在$\theta_{\rm{d}}$使回波功率满足最小探测功率; 随着${\xi _1}$增大, 得到第二类曲线, 为f1与目标圆总有交点时回波功率总小于最小探测功率, f1与目标圆没有交点的回波功率曲线恒大于最小探测功率, 随着${\xi _1}$继续增大, f1与目标圆没有交点的回波功率曲线出现$\theta_{\rm{d}}$, 使回波功率小于最小探测功率; 第三类曲线不论f1与目标圆是否有交点回波功率恒小于最小探测功率. 这三类曲线相交边界处的曲线所对应的${\xi _1}$与$\theta_{\rm{d}}$分别表示满足边界条件的最大${\xi _1}$与其对应的$\theta_{\rm{d}}$. 图 10 最大相邻脉冲光束夹角${\xi _{\max}}$ (a) f1与目标圆位置关系曲线; (b) $\theta_{\rm{d1}}$与$\theta_{\rm{d2}}$取值计算 Figure10. Maximum angle ${\xi _{\max}}$ between adjacent pulse beams: (a) The relation curve between f1 and the position of the target circle; (b) value of $\theta_{\rm{d1}}$ and $\theta_{\rm{d2}}$.





 图 1 单光束扩束扫描激光周视探测系统结构
图 1 单光束扩束扫描激光周视探测系统结构 图 2 单光束脉冲激光周向扫描探测系统探测目标示意图[11]
图 2 单光束脉冲激光周向扫描探测系统探测目标示意图[11]

 图 3 沿x轴正方向脉冲光束视图
图 3 沿x轴正方向脉冲光束视图







 图 4 相邻脉冲激光束在面M上的投影
图 4 相邻脉冲激光束在面M上的投影






 图 5 发射激光束与投影图像几何关系
图 5 发射激光束与投影图像几何关系









 图 6 回波功率Pr与K(R), R,
图 6 回波功率Pr与K(R), R, 



















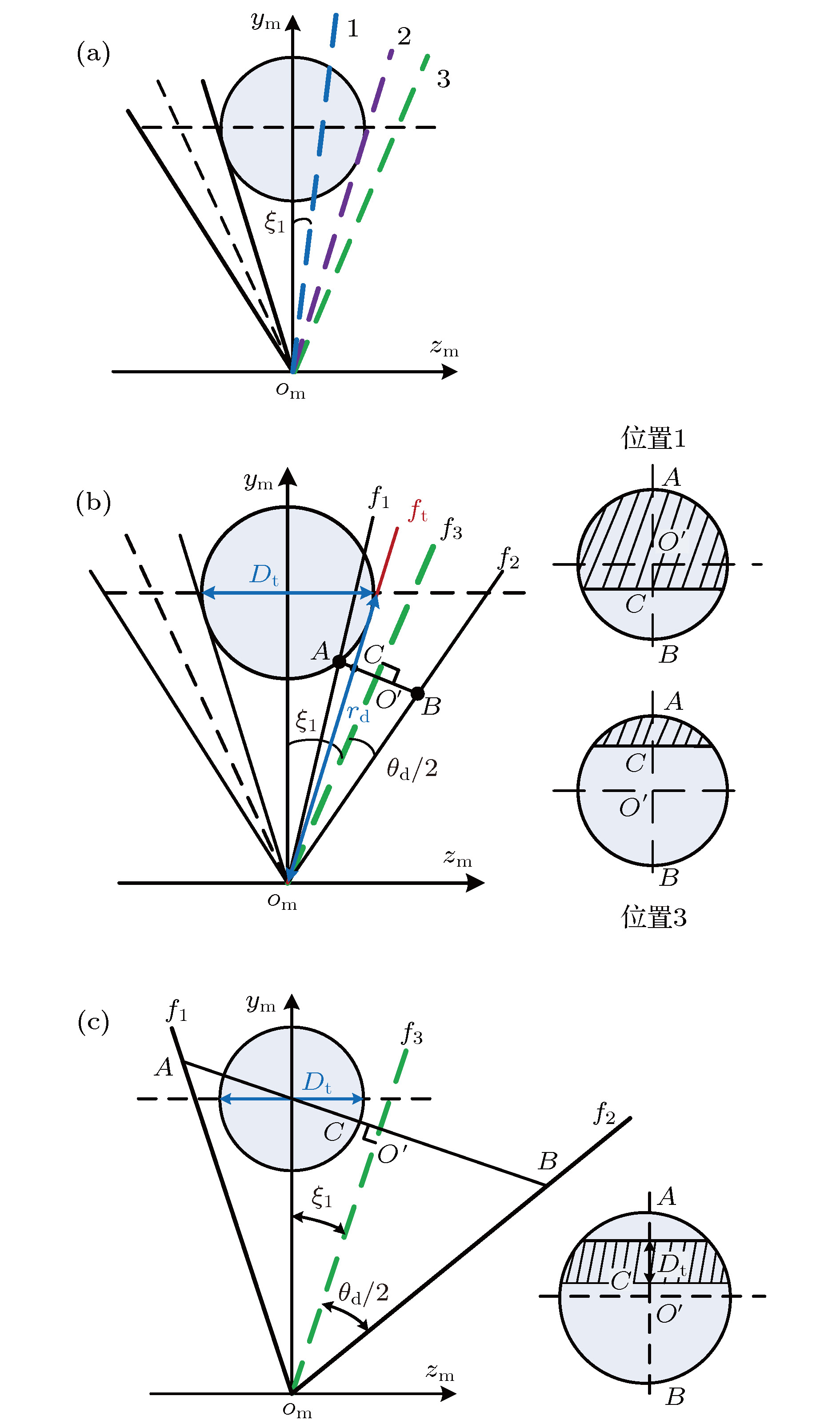 图 7 K(R)数学模型 (a)光束中心线位置示意图; (b)光束左边沿线与目标相交时K(R)模型; (c)光束左边沿线与目标相离时K(R)模型
图 7 K(R)数学模型 (a)光束中心线位置示意图; (b)光束左边沿线与目标相交时K(R)模型; (c)光束左边沿线与目标相离时K(R)模型























 图 8 K(R)与
图 8 K(R)与























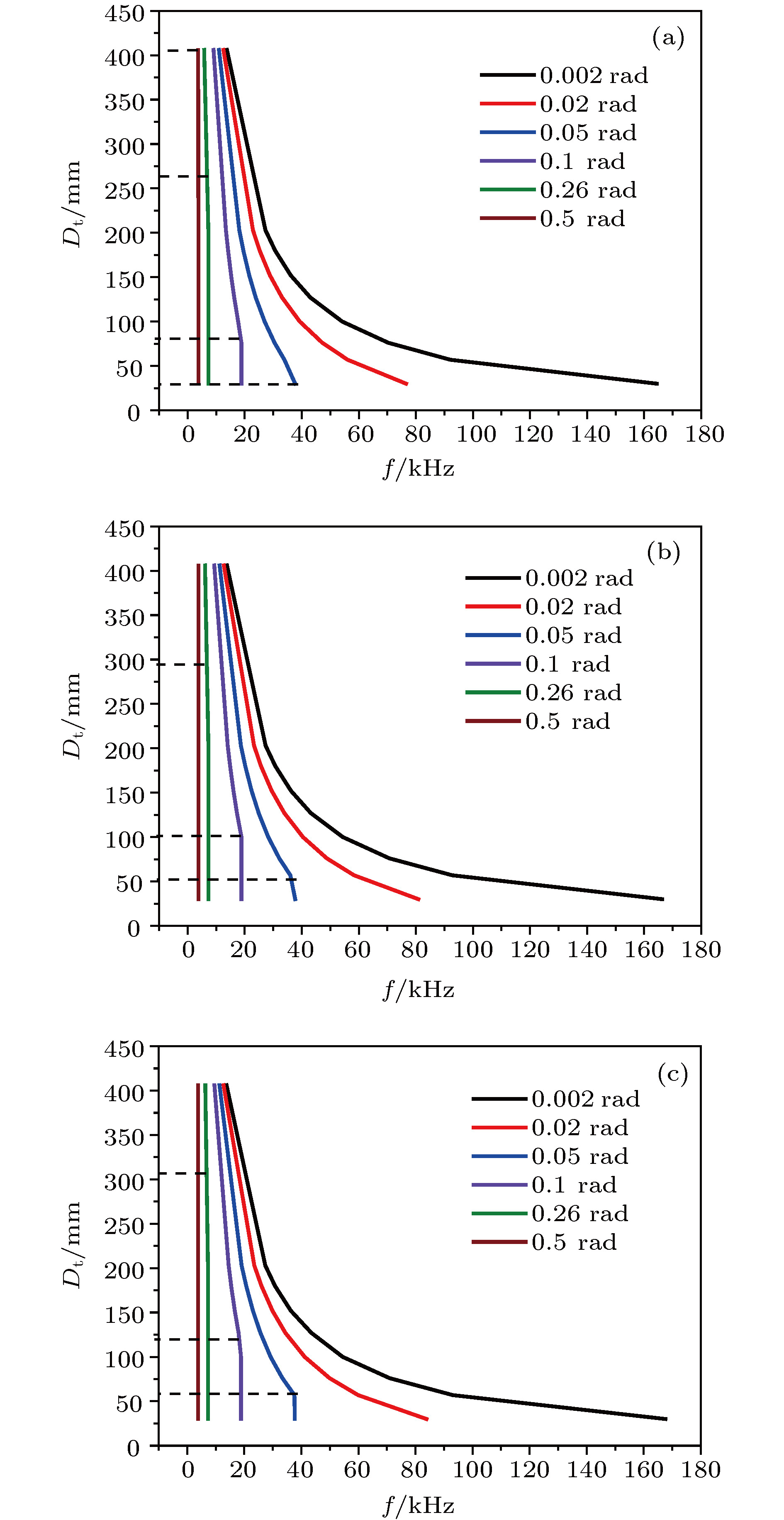 图 9 脉冲频率f、光束角
图 9 脉冲频率f、光束角
















































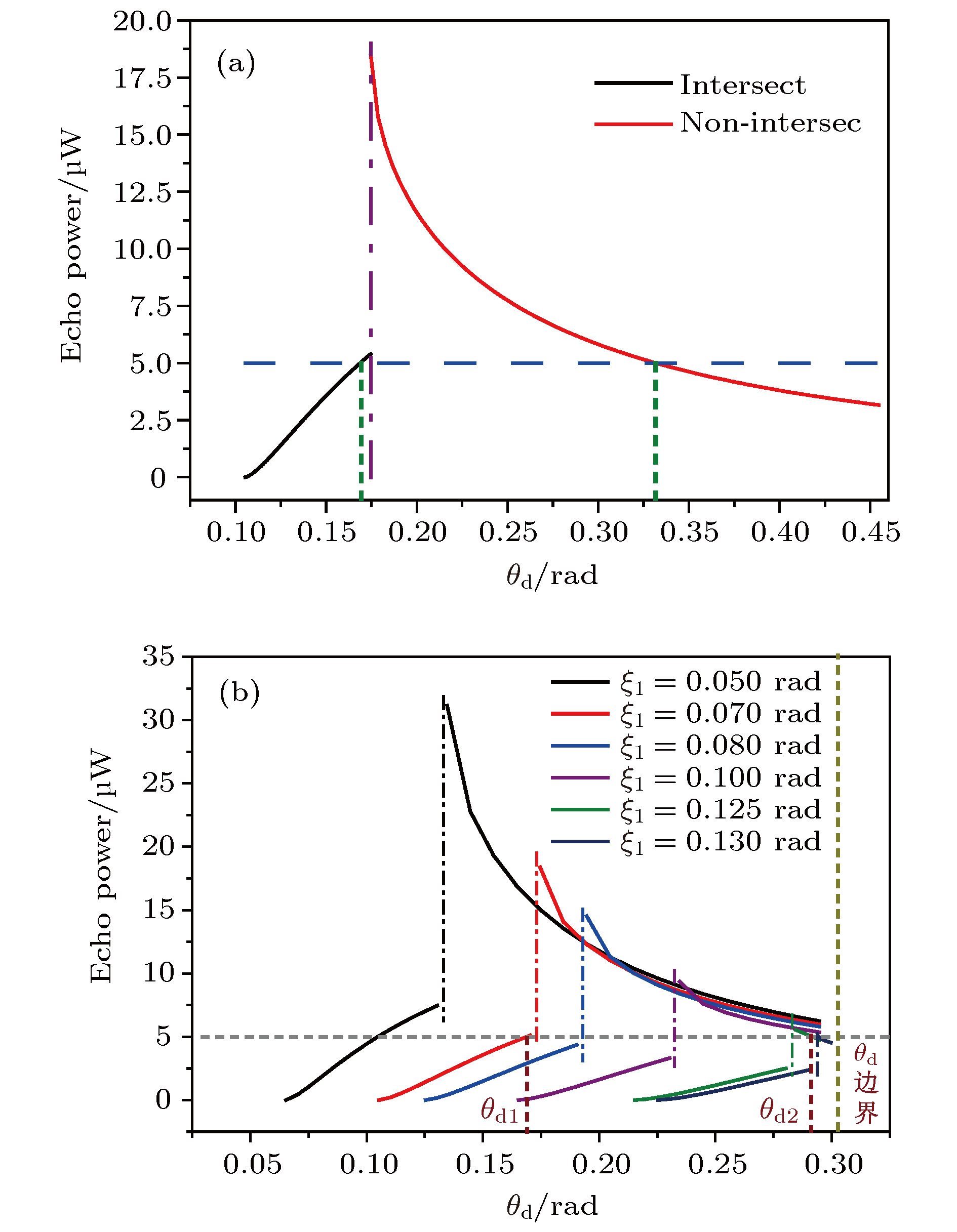 图 10 最大相邻脉冲光束夹角
图 10 最大相邻脉冲光束夹角























 图 11
图 11 




























