1.National Laboratory of Solid State Microstructures, School of Physics, Nanjing University, Nanjing 210093, China 2.College of Science, Jiujiang University, Jiujiang 332005, China
Fund Project:Project supported by the National Key R&D Program of China (Grant No. 2018YFA0306200) and the National Natural Science Foundation of China (Grant Nos. 91750202, 11534006).
Received Date:12 October 2018
Accepted Date:02 January 2019
Available Online:01 March 2019
Published Online:20 March 2019
Abstract:As a new technique of photomicrography of complex optical field, the Fresnel incoherent correlation holography (FINCH) is particularly attractive in recent years because of its incoherent optical recording characteristics. For a new image recording and reconstruction system, a key concern is how to configure the experimental layout of FINCH by using available optical elements to achieve optimal resolution. However, in previous reports, there exist different viewpoints about this issue, and the imaging conditions of the best resolution remain to be clarified. As is well known, the imaging resolution is affected by the effective aperture of hologram and the change of the recording distance between spatial light modulator (SLM) and image sensor (CCD) can cause the hologram aperture to change. In the FINCH system the effective aperture of hologram is related not only to the aperture influence of each element used in the recording system, but also to the overlapping area of interference between the signal and reference wave and the pixel spacing of the image sensor. In previous reports, the researchers mainly used the ray-tracing method to discuss the effective aperture radius of hologram by ignoring the influences of the diffraction of light wave and the pixel spacing size of image sensor on the aperture of hologram. Based on the theories of wave optics we carry out a thorough investigation into the effective aperture of FINCH. We find that the pixelization of the image sensor, e.g. CCD, is a decisive factor influencing the resolution of FINCH, and we adopt numerical simulations and optical experiments to further verify the theoretical conclusions that the optimal lateral resolution of FINCH is achieved only if the recording distance (Zh) is equal to the focal length (fd) of diffractive lens displayed on a spatial light modulator; the resolution is deteriorated with the increase of $\left| {{Z_{\rm{h}}} - {f_{\rm{d}}}} \right|$. From the viewpoint of Fourier optics, the smaller the imaging distance $\left| {{Z_{\rm{h}}} - {f_{\rm{d}}}} \right|$, the larger the aperture angle of hologram ($ \approx {{{R_{\rm{h}}}} / {\left| {{Z_{\rm{h}}} - {f_{\rm d}}} \right|}}$), the higher the collected spatial frequency is, hence, the higher the lateral resolution is. On the other hand, although the FINCH overcomes the spatial coherence limitation, it requires temporally coherent or quasi-monochromatic light. Our study also indicates that the requirements for the spatiotemporal coherence can be eased when the CCD is located at the focal plane of diffractive lens. Keywords:holography/ resolution/ zone plates/ liquid-crystal devices
在双物点模拟中, 研究两物点的再现像斑的间隔与记录距离${Z_{\rm{h}}}$之间的相互关系. 根据瑞利判据[20], 两物点间最小可分辨的距离用${\rho _{\rm{o}}} = {{0.61\lambda } / {({\rm{NA}}}}{M_{\rm{T}}})$来表示, 式中${\rm{NA}}\; = {{{R_{\rm{s}}}} / {{f_{\rm d}}}}$为衍射透镜的数值孔径. 当${R_{\rm{s}}} = 4.32\;{\rm{mm}}$, ${f_{\rm{d}}}\; = 0.60\;{\rm{m}}$时, ${\rho _{\rm{o}}}$近似为$10.7\;{\text{μ}} {\rm{m}}$. 本文分别取两物点的间距${\varDelta}={\rm{9}}{\rm{.0,}}\;{\rm{10}}{\rm{.0}}$和${\rm{11}}{\rm{.0}}\;{\text{μ}} {\rm{m}}$进行对比模拟研究, 且其他光路参数与前述相同, 模拟结果如图3所示. 依据瑞利准则[20], 如果两个像斑之间中心凹陷超过峰值强度的27.0%左右, 则两个像斑可以被分辨的. 从图3(d2)和图3(d3)可以看出, 当${Z_{\rm{h}}} = {f_{\rm{d}}}\; = 0.60\;{\rm{m}}$, 两物点的间距分别为${\rm{10}}{\rm{.0}}$和${\rm{11}}{\rm{.0}}\;{\text{μ}} {\rm{m}}$时, 可以分辨两个再现像斑; 当${Z_{\rm{h}}} = {{{f_{\rm{d}}}} / 2} = 0.30\;{\rm{m}}$或${Z_{\rm{h}}} = 2{f_{\rm{d}}} = 1.20\;{\rm{m}}$时, 则两个再现像斑不可辨. 因此双物点的数值模拟实验同样证明了FINCH系统获得最佳分辨率的条件是${Z_{\rm{h}}} = {f_{\rm{d}}}$时. 图 3 不同记录距离${Z_{\rm{h}}}$(0.30 m (a), 0.60 m (b)和1.20 m (c))获得的双物点再现像, 其中${f_{\rm{d}}} = 0.60\;{\rm{m}}$, 双物点间距$\varDelta $分别为$9.0$(第1行), $10.0$(第2行)和$11.0\; {\text{μ}} {\rm{m}}$(第3行); (d1), (d2)和(d3)分别表示双物点间距$\varDelta $为9.0, 10.0和$11.0\; {\text{μ}} {\rm{m}}$时, 再现像强度的一维分布 Figure3. Reconstructed double images under different recording distances ${Z_{\rm{h}}}$ (0.30 m (a), 0.60 m (b) and 1.20 m (c)) while keeping ${f_{\rm{d}}} = 0.60\;{\rm{m}}$ for different spacing of two object points $\varDelta = 9.0\;{\text{μ}} {\rm{m}}$ (the first row), $10.0\;{\text{μ}} {\rm{m}}$ (the second row) and $11.0\; {\text{μ}} {\rm{m}}$ (the third row), respectively. (d1), (d2) and (d3) One-dimensional distribution of reconstructed image intensity for $\varDelta = 9.0, 10.0$ and $11.0\; {\text{μ}} {\rm{m}}$, respectively.
24.2.光学实验 -->
4.2.光学实验
实施的FINCH光学实验系统的光路如图4所示. 准直扩束的LED光源(Thorlabs, M625L3-C5)发射的光波经过滤波片(Thorlabs, FL632.8-3)后成为中心波长为633 nm的窄带光, 通过可变光阑后照射位于准直透镜(${f_0} = 0.12\;{\rm{m}}$)前焦面处的分辨率板(Negative USAF1951). 分辨率板的透射光波通过偏振片P1后变成线偏振光, 且其偏振方向与反射型SLM (Holoeye PLUTO, 阵列$1920 \times 1080$, 像素大小${\delta _{\rm{s}}}{\rm{ = }}\;8.0\;{\text{μ}} {\rm{m}}$)的主轴方向的夹角为50°. 这样入射线偏振光可被SLM分解为与其主轴相互平行和垂直的两个分量, 平行分量将被SLM上加载的衍射透镜调制后成为信号光波, 未被衍射透镜调制的垂直分量则成为参考光波. 第二个偏振片P2使得相互正交的信号光和参考光在CCD记录面上可以相互干涉, 形成数字全息图. 采用三步相移法, 用CCD相机(Pike F-505, 阵列$2452 \times 2054,$ 像素大小${\delta _{\rm{c}}} = 3.45\;{\text{μ}} {\rm{m}}$)先后依次记录了3幅全息图. 然后根据(5) 式从3幅全息图重构出CCD平面处物光场的复振幅分布, 进而在计算机中进行菲涅耳衍射积分计算, 数字重构出像平面上的再现像(图5—图7). 在实验中, 通过步进电机驱动平台(Thorlabs, LTS300)调控CCD位置对记录距离${Z_{\rm h}}$进行精确标定. 图 5 (a)计算机数字再现的图像, 其中对每一种衍射透镜焦距${f_{\rm{d}}}$(分别为0.30, 0.40, 0.50和0.60 m)测试了不同记录距离${Z_{\rm{h}}}$(= 0.90${f_{\rm{d}}},$ 0.95${f_{\rm{d}}},$ 1.00${f_{\rm{d}}},$ 1.05${f_{\rm{d}}}$, 1.10${f_{\rm{d}}}$); (b)不同的记录距离相对值(${{\alpha = {Z_{\rm{h}}}} / {{f_{\rm{d}}}}}$)对应的再现像可见度 Figure5. (a) Computer digital reconstructed images for ${f_{\rm{d}}}$ = 0.30, 0.40, 0.50 and 0.60 m, each with different ${Z_{\rm{h}}}$ (= 0.90${f_{\rm{d}}},$ 0.95${f_{\rm{d}}},$ 1.00${f_{\rm{d}}},$ 1.05${f_{\rm{d}}}$ and 1.10${f_{\rm{d}}}$); (b) relative values of different recording distances (${{\alpha = {Z_{\rm{h}}}} / {{f_{\rm{d}}}}}$) corresponding to visibility of reconstructed image.
图 6 (a)—(o) 再现图像的裁剪部分, ${f_{\rm{d}}} = 0.60\;{\rm{m}}$, 记录距离${Z_{\rm{h}}}$从0.53 m到0.67 m, 红色框所标记区域的可见度将在图7中显示 Figure6. (a)?(o) Cropped sections of reconstructed images when ${Z_{\rm{h}}}$ varies from 0.53 m to 0.67 m while ${f_{\rm{d}}}$ = 0.60 m. Visibility of the lines marked with the red box for the different ${Z_{\rm{h}}}$ will be plotted in Figure 7.
图 7 不同记录距离Zh下, 图6红色方框标示区再现像的可见度分析 (a)可见度; (b) 标示区特征线的强度分布 Figure7. Visibility of line pattern within the regions marked with the red box in Figure 6 for the different ${Z_{\rm{h}}}$: (a) Visibility of the line pattern; (b) intensity profile across the line pattern.
图 4 FINCH系统光学实验装置示意图 Figure4. Schematic representation of experimental set-up of FINCH.








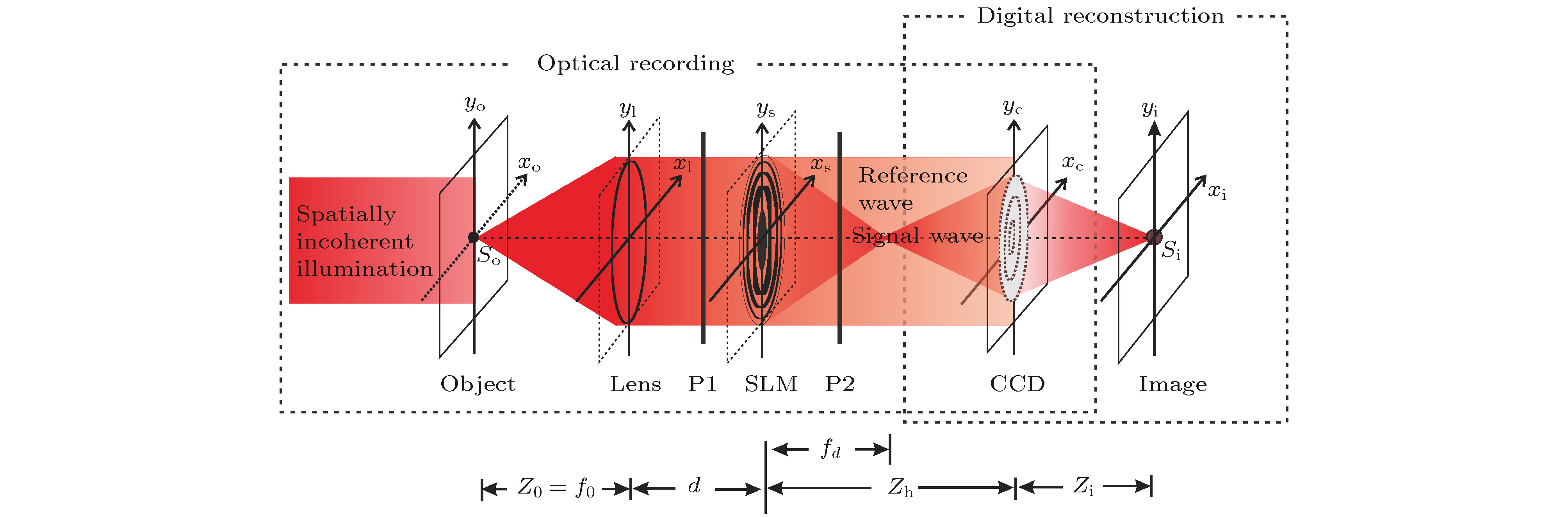 图 1 FINCH系统原理示意图(P1和P2为偏振片)
图 1 FINCH系统原理示意图(P1和P2为偏振片)

















































































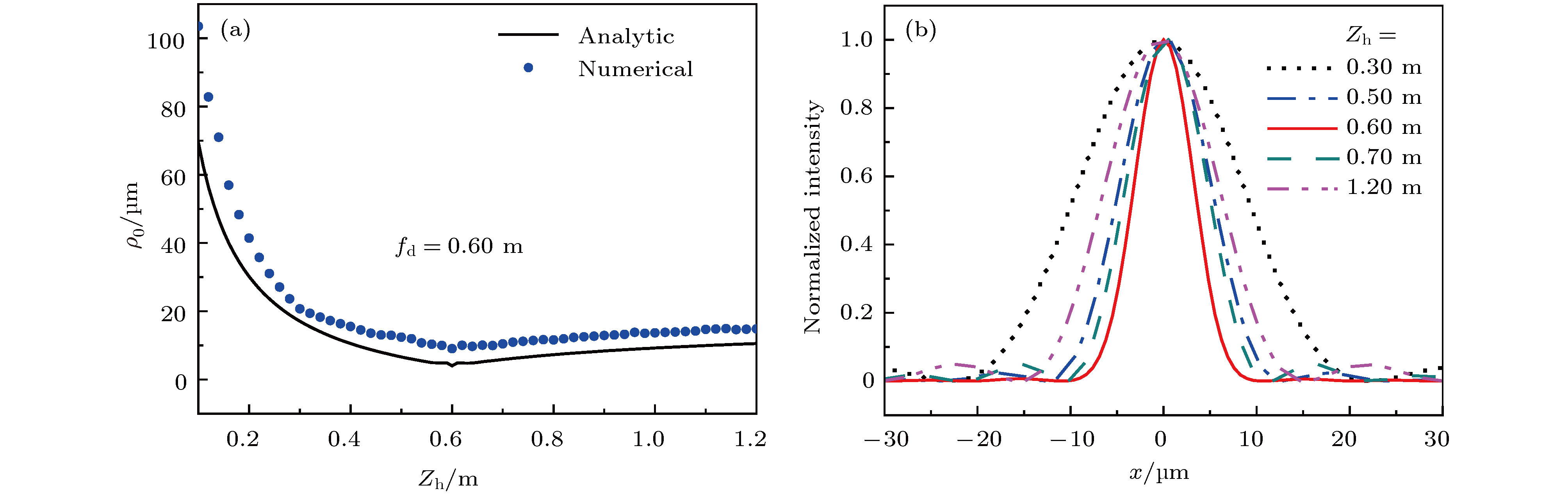 图 2 可分辨物点半径
图 2 可分辨物点半径






















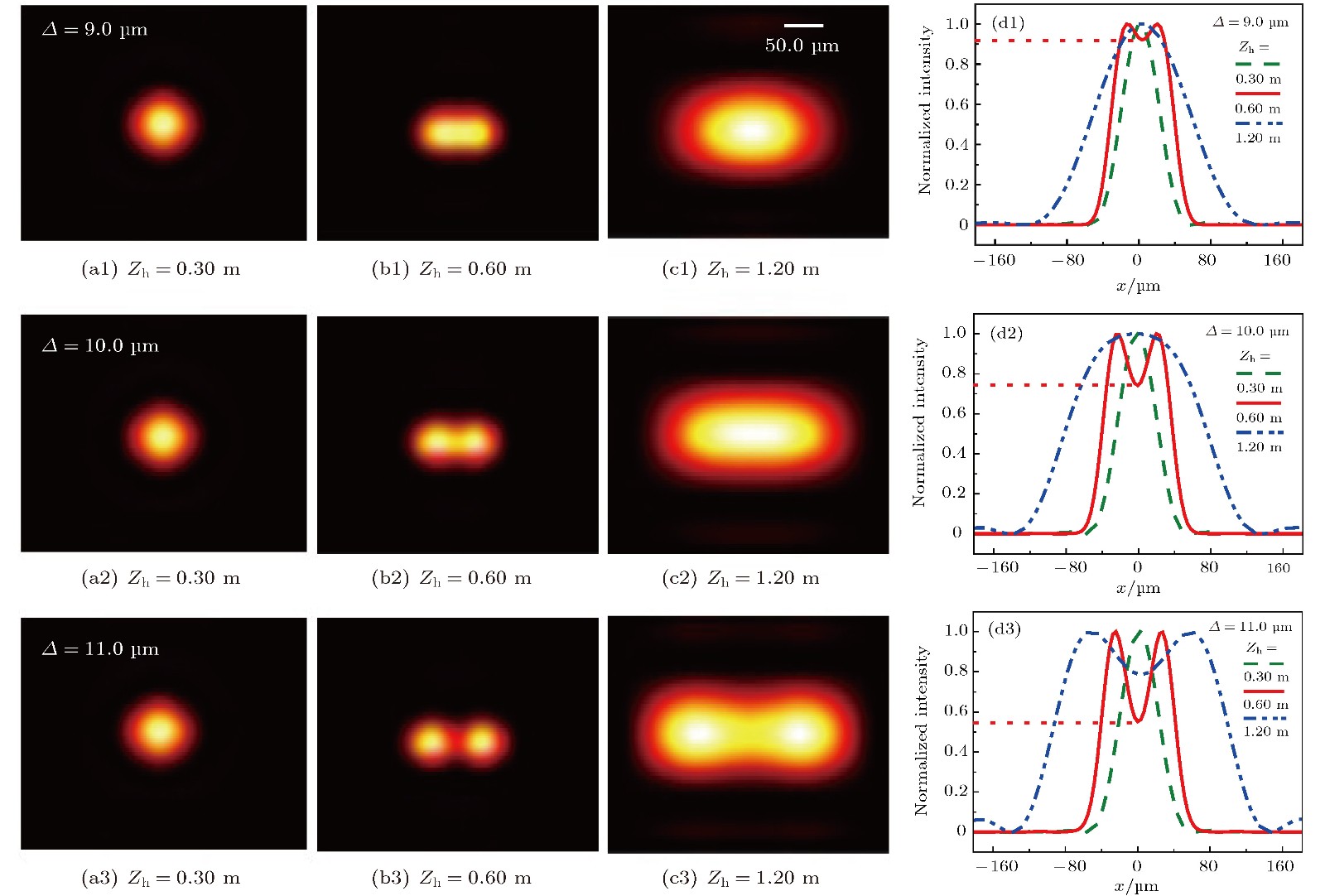 图 3 不同记录距离
图 3 不同记录距离




















 图 5 (a)计算机数字再现的图像, 其中对每一种衍射透镜焦距
图 5 (a)计算机数字再现的图像, 其中对每一种衍射透镜焦距















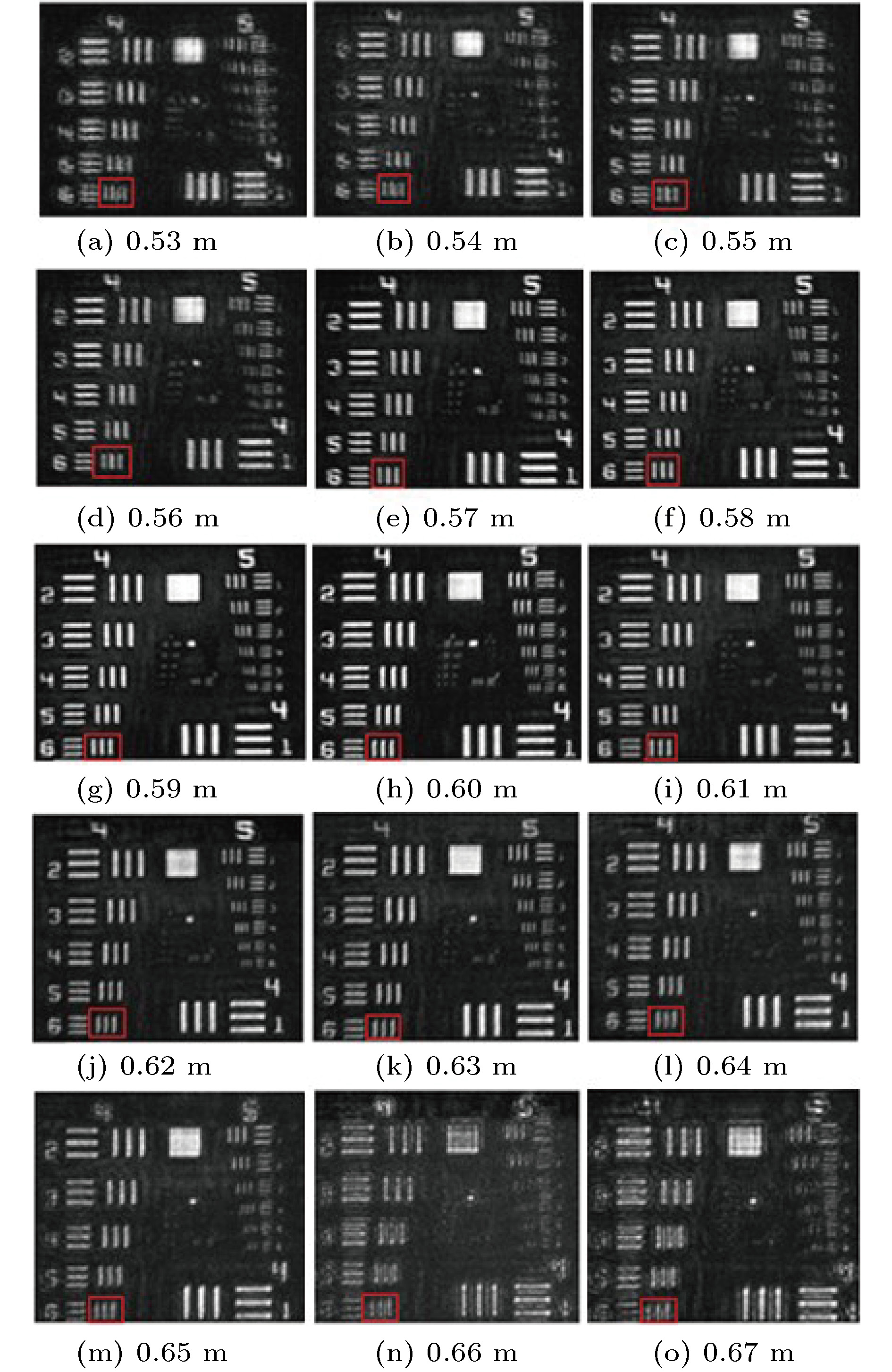 图 6 (a)—(o) 再现图像的裁剪部分,
图 6 (a)—(o) 再现图像的裁剪部分, 




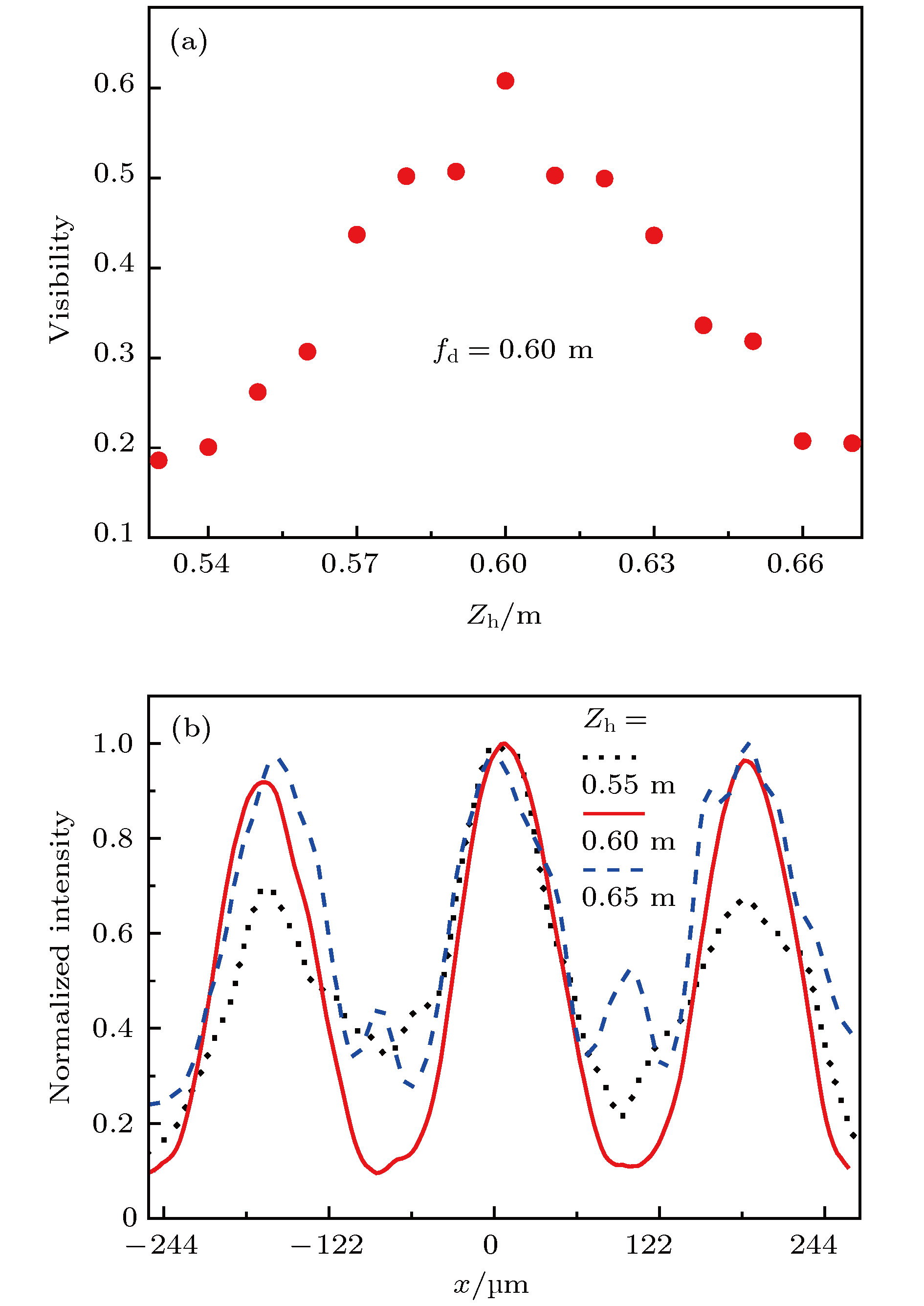 图 7 不同记录距离Zh下, 图6红色方框标示区再现像的可见度分析 (a)可见度; (b) 标示区特征线的强度分布
图 7 不同记录距离Zh下, 图6红色方框标示区再现像的可见度分析 (a)可见度; (b) 标示区特征线的强度分布
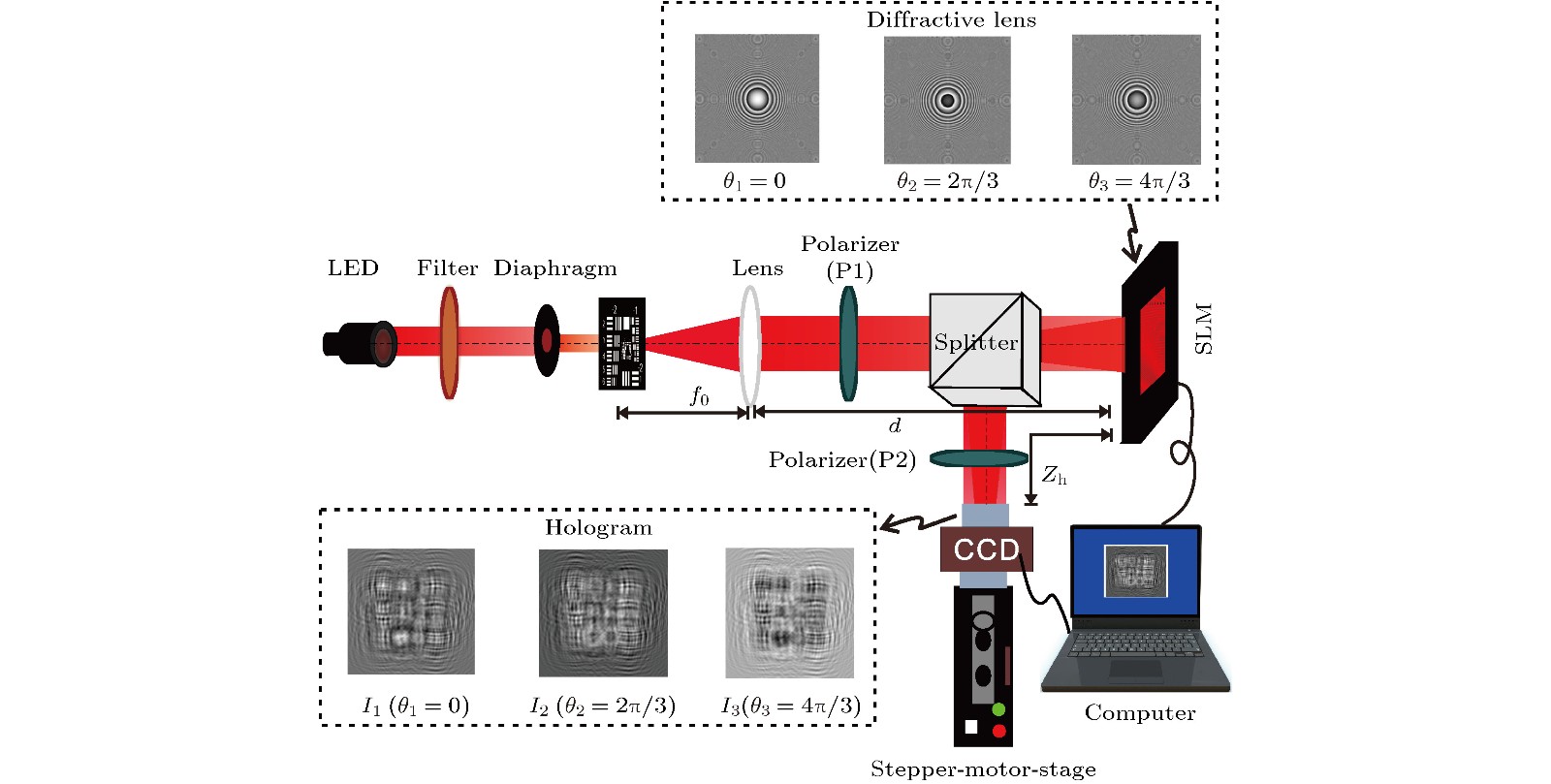 图 4 FINCH系统光学实验装置示意图
图 4 FINCH系统光学实验装置示意图





