 ,2), ����, ����������ҵ��ѧ�����о�Ժ, �㶫���� 518057
,2), ����, ����������ҵ��ѧ�����о�Ժ, �㶫���� 518057������ҵ��ѧ����ѧԺ, ���� 710072
AN OPTIMAL GRASP PLANNER FOR SPACE ROBOTS USING CLAMPED B-SPLIE1)
Wang Mingming,2), Luo Jianjun, Yu MinResearch & Development Institute of Northwestern Polytechnical University in Shenzhen, Shenzhen 518057, Guangdong, ChinaSchool of Astronautics, Northwestern Polytechnical University, Xi'an 710072, China
ͨѶ����: 2) ������,������,��Ҫ�о�����: �ռ������ѧ. E-mail:mwang@nwpu.edu.cn
�ո�����:2020-04-14��������:2020-11-6�����������:2021-02-07
| ��������: |
Received:2020-04-14Accepted:2020-11-6Online:2021-02-07
����� About authors

ժҪ
�ռ��е�ۼ�����δ��ʵʩ�ڹ������ά������Ĺؼ�����֮һ. ���û�е�۶Կռ�Ǻ���Ŀ��, �ر��Ƿ���Ŀ���ץ����Ȼ���ھ����ս. �������һ�ֻ���Clamped B�����Ŀռ�Ǻ���Ŀ��ץ�����Է���. �ڶԷǺ���Ŀ����ռ��е���˶�ѧ�붯��ѧ�����Ļ�����, ��ϷǺ���Ŀ�걻�ռ��е��ץ����Ķ���̬��ż�Է���, ����ץ��������ɲ�����������Ϊץ��������Ƶ��Ż�ָ��. ���, ����Ŀ����˶�Ԥ��Ϳռ��е�۵�ץ������ͼ����, ȷ���ռ��е��Ӧ��Ŀ�������ץ��ʱ����ץ���ն�״̬. ����Clamped B�����Կռ��е�۸��ؽڹ켣����ʱ���һ����������, ����ץ�������еĻ�е�۹ؽڽǡ��ٶȡ���ײ��ץ�����ȵ�Լ��������ѧ�任, ���ս�ץ������ת��Ϊ��Լ������Ŀ��ķ������Ż�����, ��������Ӧ����Ȩ�ص�����Ⱥ�Ż��㷨�������. ������Ƶ�ץ������Ӧ���ڿռ������ɶ��˶�ѧ�����е��, ʵ���˶Կռ��з���Ŀ��ijɹ�����, ��֤������ץ�����ԵĿ���������Ч��.
�ؼ��ʣ�
Abstract
Space manipulator is one of the key technologies to carry out on-orbit servicing and maintenance missions in the future. Until now, it is still a vast challenging mission to capture a non-cooperative target satellite by using a space robot, especially when the motion of the target satellite is tumbling. How to design a feasible and optimal grasping strategy is very important for the successfully capturing of non-cooperative target. Based on the concept of the Clamped B Spline, this paper investigates an optimal grasp planner for a kinematically redundant space manipulator to capture an arbitrarily rotating target, such as space debris, dysfunctional satellites, etc. The kinematics and dynamics of the space robotic system and non-cooperative target in pre- and post-capture phases are firstly introduced as the foundation for designing the grasp planner. With consideration of the kineto-statics duality of the non-cooperative target captured by a space robot, the concept of the force manipulability ellipsoid was derived and employed as an optimization index in the following grasp planning strategy design. Subsequently, the space robotic optimal grasping time and the target's terminal motion states are determined with consideration of the robotic capability map, the target motion prediction and the grasping direction of the space robotic end-effector. Furthermore, the joint trajectories are parameterized with time normalization using the clamped B-spline curves. The grasp planner of the space robot is then transformed as a multi-constraint, multi-objective nonlinear optimization issue with consideration of the space robotic joint angle, velocity, collision avoidance and end-effector's grasping cone limits, and solved by a constrained particle swarm optimization algorithm with adaptive inertia parameters. The designed grasp planning strategy is applied to a seven degree-of-freedom kinematically redundant manipulator mounted on a free-floating spacecraft base, and the successful capturing of a tumbling target satellite in space is realized. Simulation results are presented and demonstrated the feasibility and effectiveness of the proposed method.
Keywords��
PDF (15056KB)Ԫ������ά�����������������EndNote|Ris|Bibtex�ղر���
�������ø�ʽ
������, ����, ����. ����Clamped B�����Ŀռ�Ǻ���Ŀ��ץ��������1). ��ѧѧ��[J], 2021, 53(2): 524-538 DOI:10.6052/0459-1879-20-114
Wang Mingming, Luo Jianjun, Yu Min.
����
�ռ�����˽�������ά�ޡ��ڹ�װ�䡢��Ƭ����������з�������Ҫ����. ���͵��ڹ���ʾ������"Robot Technology Experiment (ROTEX)"��"Engineering Test Satellite VII (ETS-VII)"��"Orbital Express (OE)"��"��˺�"����Ŀ��֤�˿ռ������ִ���ڹ��������Ŀ�����[1-4]. Ȼ��, �ڹ�������������ս�ԵĹ���֮һ����θ�Ч���ɿ���ץ��Ŀ������. ����, �ռ��е�������֮��Ķ���ѧ�������ķ�����Լ������ץȡ�滮������µ���ս.����������������ֿռ��е�۹켣�滮����. ��ǿ����ͼ(EDM)�ĸ���[5]���ȱ������Ӧ���ڿռ�����˵�����ʽ�켣�滮�������. Ȼ��, EDM���Ѽ���, �����Ƕ��ھ��нϸ����ɶȵĿռ��е��. �˺�, ����[6]����㷴���ÿռ�(RNS)�ĸ���, ��Ӧ�����˶�ѧ�����������ռ��е�۵Ĺ켣����. ����[7,8]���ǽǶ����غ�, ʹ��RNS�ĸ�����ƹؽڹ켣ץ������Ŀ��. Ȼ��, ����6���ɶȻ�е�۶���, RNS�����ʮ������. ����[9]��, �����Чƽ��ۺͶ�̬ƽ�����(DBC)���ϵķ������ٻ�����̬����. ����[10]�����һ���µ���ϲ���, ��DBC��RNS���ɵ������������ȼ����������. �˺�, ����[11]����˿ռ�˫�ۻ����˵㵽���㷴���ò����Ĺ滮����. ����[12]��ģ�ͷ����˿ռ������ϵͳ�Ķ���ѧ���, ��������ѧ���Ӧ������С��������̬���ŵ��˶��켣�滮. ����, �ɲ��ò�ͬ�Ĺؽڹ켣����������, ���������Ծ���B����[13]��Bezier����[14]��; ����[15]������һ�ֵѿ����켣����������, ʹ������Ư���ռ�����˵Ĺ켣�滮����ת��Ϊ�������Ż�����. �������Ż�������Բ����Ŵ��㷨����ֽ����㷨�Ƚ������.
�����о���Ҫ�ǽ������ǰ�οռ��е�۵Ĺ켣�滮����, ��δ����ץ��Ŀ��������. ͨ��, ��е����ץ���ƶ���Ŀ��, ��Ҫ��֪�����������ʵ���ץ������, ����ʵ�ֻ�е��ĩ��ִ������Ŀ��ץ����֮�佨���ȹ̵�����. ����[16]������һ������ʵ�����й������ƶ���е�ֵ�ץ���滮����, ���õ�ǰ����ģ���Ż��������ֵ�ץ��λ��. ����[17]�����һ��BiSpace�滮�㷨, �����˫�����̽�������(RRT)��RRT-JT�㷨, ͨ��ͬʱ̽������ռ���ʵ�ֿ��ٹ滮. �ڴ˻�����, ����[18]����˸Ľ���RRT*���Ĵ��������߽�ϵ�Э��·���滮����. ����[19]�������һ�ֻ���Ŀ�����κͲ�������, ѧϰ����ץȡ���Ե�ץ�����ɷ���. ǰ�ڵ�ץ���滮����Ϊ�ڹ�ץ���滮�ṩ�˲ο�. ͨ���ڽӽ���ʹ��ƫ�ö�������, �ڽӴ���ײ��ʹ���迹����, �Լ��ڲ����ν��зֲ�ʽ��������, ����[20]�����һ�ֿ��еĿ�������, ���ڳɹ���ɲ������. ����[21]�����Ӿ�����, ������һ������������е��������, �������ķǺ���Ŀ��ץ������, �γ��˻����˲������δ֪Ư�ƺͷ���Ŀ���Ԥ��滮��Ϸ���. ����ץ����������ײ��������˻�����̬�仯������, ����[22]���һ����ײǰ�Ļ�е�۹����Ż�����. ��Կռ��е��ץ��Ŀ���Ŀ�������, ����[23,24]����˿ռ�������ڹ첶��Ǻ���Ŀ������Ի���, ���ֱ�����������ȫ��ģ������˳���ƺͶ�̬������˳����, ʵ��ץ�����̵Ŀ�����뵯������������, ��Ч�����˻�е�۹ؽڵ���Ĺ���. ����[25]�����һ��Ŀ���������Բ�ͬʱ�ȶ�������Э�����Ʒ���. ����[26]�����ۿռ������Ϊ����, ���һ�ֻ���λ�������Ĺ켣�滮�㷨����Ӧ������λ�γ���ʱ��λ���������. ����[27]ϵͳ�ظ����˿ռ�˫�ۻ����˵�Эͬ�������켣�滮����. ����[28]����˿ռ�˫�ۻ����˲���Ŀ������ԽӲ�����Э�����Ʒ���.
ǰ���о���ץ�������Ժ�ץ���滮�����������ȱ��: (1)�ռ������ץ������δ��ֿ���Ŀ����˶��ͻ����˵�ץ������, ������ץȡ������, ��ȷ�����ץ��ʱ��; (2)�Ǻ���Ŀ���ץ���滮��һ����Ŀ�ꡢ��Լ���ķ������Ż�����, Ϊ����ץ���滮���Ե���Ч��, �ڹ滮���������ֿ��Dz����IJ���. ���ʵ�ֶԷ���Ŀ��İ�ȫ�ɿ�ץ���Կ�չ�������ڹ��������������Ҫ. ����Ϊֹ, �ռ��е�۵�ץȡ�滮��Ȼ��һ�����ս�ԵĹ���. ���ĵ�Ŀ��������˶�ѧ����ռ��е�۵�ץ���滮����, ͬʱ��ֿ��ǿռ��е�۵�ץ��������Ŀ���˶����ؽ����ƺͷ���ײ��Լ��. ѡ���˶�ѧ�����е�۵�ԭ��������������������˶�ѧ��, �����������Լ������, ������С��������̬���š�����ײ��������ɲ����ȵ�. ����ͨ����ץ�����Եķ�����֤, Ϊ�����ռ������ץ����̬�Ǻ���Ŀ���ṩ����֧��.
1 ����ѧ��ģ
1.1 �ռ�����˶���ѧ
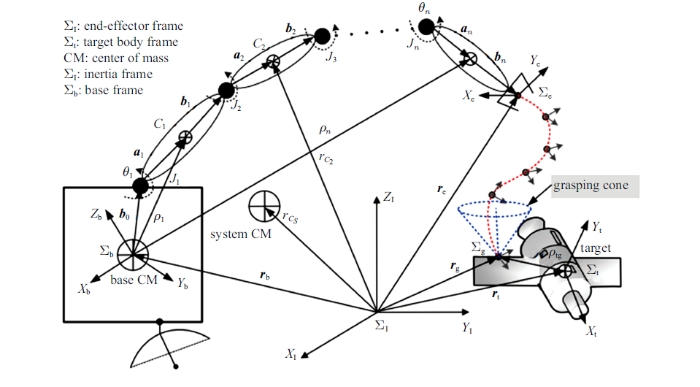
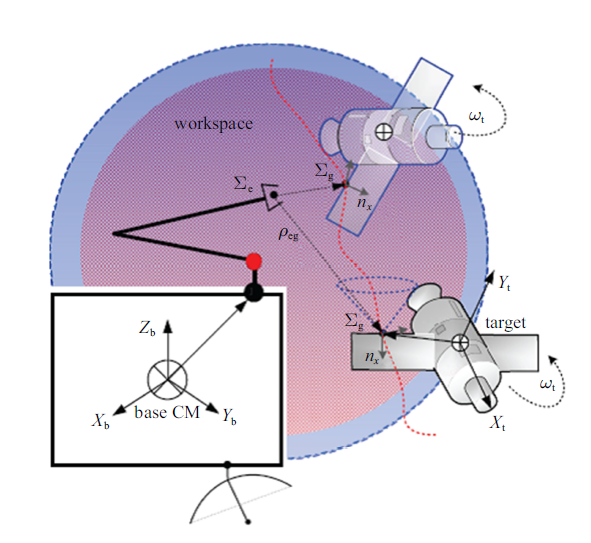
��ͼ1��ʾ, �ռ������ϵͳ�ɺ�����������$n$�����ɶȵIJ�����е�����, ������$n+1$������. ����Lagrange����ѧ����, �ռ������ϵͳ�Ķ���ѧ���̿ɱ�ʾ��������${\ddot{{ x}}}_{\rm b} =\left( {{\ddot{{ r}}}_{\rm b} ,\dot{{\omega }}_{\rm b}} \right)$, ${\ddot{{ \theta}}}$��ʾ��е�۵Ĺؽڼ��ٶ�. ����Ư��ģʽ��, ${ h}_{\rm b} ={\bf0}$��${ h}_{\rm e}={\bf0}$, ������ʼ״̬��ĩ��ִ������ʼλ����֪, ����ִ�л������ڹ���ģʽ, �����ǻ�е�۹ؽڵ�������������. ���, ����ϵͳ���ϸֶ����غ�. ����${ L}_{0} $��������ϵͳ�ij�ʼ�߶����ͽǶ���, ${ L}_{0} ={ H}_{\rm b} {\dot{{ x}}}_{\rm b} +{ H}_{\rm bm} {\dot{{ \theta }}}$, �ٶ�${ L}_{0}={\bf0}$��${ H}_{\rm b} $�ǿ���, �����˶�������Ϊ
ͼ1
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ1ץ��ǰ�ռ������ʾ��ͼ
Fig.1Schematic diagram of space robot in pre-capture phase
��ʽ(2)����ĩ��ִ�������˶�ѧ����${\dot{{ x}}}_{\rm e} ={ J}_{\rm b} {\dot{{ x}}}_{\rm b} +{ J}_{\rm e} \dot{{\theta }}$, �ɵ�
ʽ��, ${ J}_{\rm g}$����Ϊ�����ſɱȾ���[29]. ����ʽ(2)��ʽ(3)���Կ���, ����Ư��ģʽ�»�����ĩ��ִ�������˶��������ڹؽڹ켣������ѧ���ЧӦ. ���, ͨ���ʵ���ץ�����Թ滮��ʵ�ֶ���Ż�ָ��, ��ĩ��ִ��������, ��С���������Ż�������ɲ����ȵ�.
1.2 �Ǻ���Ŀ�궯��ѧ
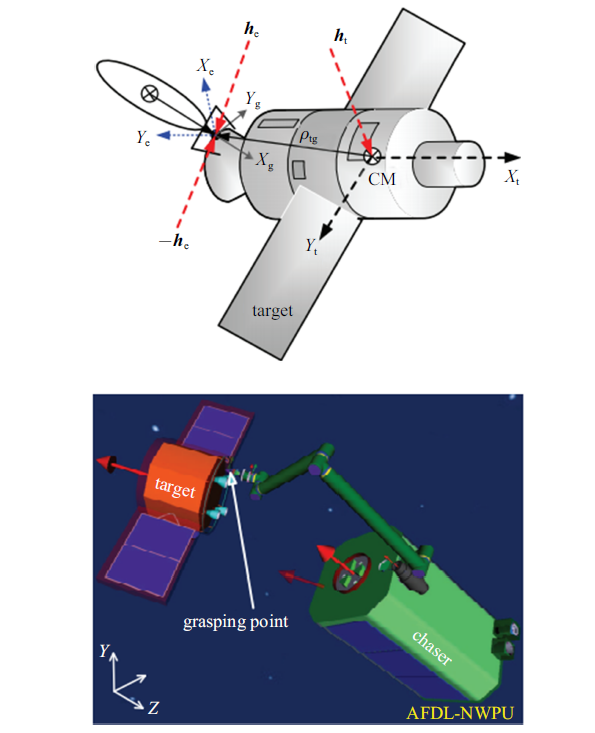
��ͼ2��ʾ, Ŀ�����ǵĶ���ѧ��������������${\dot{{ x}}}_{\rm t} \in \mathbb{R}^{6}$��Ŀ������ٶ�${\dot{{ r}}}_{\rm t}$�ͽ��ٶ�${\dot{{ \omega }}}_{\rm t} $. �����������${ H}_{\rm t} $�ͷ�������$ c_{\rm t} $����д��
$m_{\rm t} $��${ I}_{\rm t} $�ֱ�ΪĿ�����ǵ�������������. ${ E}_{3}$�ǵ�λ����. ץ��ǰ��, Ŀ���ϵ���������${ h}_{\rm t}={\bf0}$, Ŀ�겶���, ��������${ h}_{\rm t} ={ G}_{\rm te} { h}_{\rm e} $, ${ h}_{\rm e} \in \mathbb{R}^{6}$. ������ͬʱ������ĩ��ִ����, ץ������${ G}_{\rm te}$Ϊ
${ R}_{\rm e}^{\rm t} $�Ǵ�ĩ��ִ������Ŀ�걾�����ת����, ${ \rho }_{\rm tg}$��ץ���������Ŀ�����ĵ�λ��ʸ��. ������������${ \rho }=\left[ {\rho_{x} ,\rho_{y} ,\rho_{z} } \right]$, ${\tilde{{ \rho }}}$����Ϊ
ͼ2
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ2ץ����Ŀ��ʾ��ͼ
Fig.2Schematic diagram of target in post-capture phase
1.3 ����̬��ż�Է���
�����鹦ԭ��, ������ĩ��ִ�������������鹦�ؽ����ؼ�����鹦���. �ο�ʽ(1), ĩ��ִ������������ؽ����ؼ�Ĺ�ϵ��ͨ�������ſɱȾ����ת�����������ʽ(3)��ʽ(8), ���Ը�������̬��ż�ԵĹ�ϵ. Ŀ��һ��������, �ο�ʽ(8)��${ h}_{\rm t} ={ G}_{\rm te} { h}_{\rm e} $, ���Եó�
${ J}_{\rm c} =\left( {{ J}_{\rm g}^{\rm T} { G}_{\rm tg}^{-1} } \right)^{\rm T}$���ſɱȾ���, ��Ŀ���ϵ�������ӳ�䵽��е�۹ؽ�����. ���ö���̬��ż��, ������Ŀ����˶���������Ϊ
���ǵ�λ����${\dot{{ \theta }}}^{\rm T}{\dot{{ \theta }}}=1$��${ \tau }^{\rm T}{ \tau}=1$, ��ֱ��˹ؽ��ٶȿռ���ؽ����ؿռ��еĵ�λ������; �ٶȿɲ�����������ɲ�������ɷֱ�������
�±�$\ominus $������e��t; ��Ӧ��, $\odot$���Զ�Ӧ����Ϊg��c. ��ʽ(11)��ʽ(12)���Կ���, ���ɲ���������������ٶȿɲ������������һ��, ������ij��Ȼ�Ϊ����. ���ݶ���̬��ż�Է���, ���õ����ɲ����Է����Ӧ�ϲ���ٶȿɲ����Է���, ��֮��Ȼ. ��Щ���������ں���ץ���滮���������.
2 ץ��ʱ���������
һ�����, �ռ�Ǻ���Ŀ����û�й̶���ץ������, ���, ��Ҫѡ�������ض��Ľṹ��Ϊ���е�ץ����. �Ǻ���Ŀ���Ͽ���ץ����λ�ð���: Զ�ص㷢������Ե���Խӻ���̫���ܷ���֧�ܵ�. Ϊ�˸��������ռ��е�۵�ץ���滮����, ����������¼���:(1)�ռ������ϵͳ��Ŀ���Ϊ����, ��ִ��ץ������֮ǰ, �ռ��������ͨ����������������Ŀ�����ǵ�ijһ�̶�λ��;
(2)�ռ������ϵͳ�ij�ʼ�Ƕ���Ϊ0, ץ��������ϵͳ�������Բ������仯, Ŀ���������ϵ����Ŀ�����Ĵ�;
(3)�ռ������ϵͳ���˶�״̬������������֪, Ŀ���ϵ�ץ����������ȷ��, ����ץ�����ϸ�����ץ������ϵ;
(4)ץ�������к��Ի�����(�����ݶȡ��شš�̫����ѹ��)�Լ���Թ������ѧЧӦ.
2.1 ץ������ͼ��
��Ե�һ��е��, ��ץ�����������ڻ�е�۵��˶�ѧ���͡���װλ�õ�Լ��. Ϊ����ɶ�Ŀ���ץ���Ͳ���, ��е����Ҫ���걸��ץ����������. ���, ��ϻ�е�۵Ŀɴ��Ժ������Ը���[30], ������е�۵�ץ������ͼ��.����, Ŀ���ϵ�ץ������Ҫλ�ڻ�е�۵Ĺ����ռ�$WS$֮��, ��е�۹����ռ䶨������
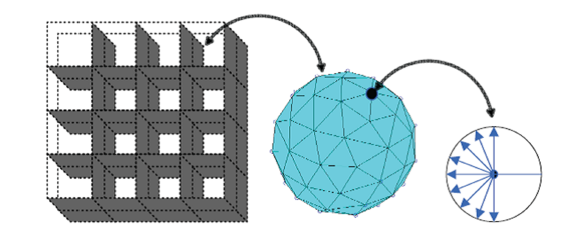
����, ${ \theta }$�ǻ�е�۵Ĺ��Ϳռ�, ${\cal F}{\cal K}\left( {{ \theta }}\right)$�������˶�ѧӳ��. ��е�۵Ŀɴ���ͼ�������˻����˹������ĵ�(TCP)����ϵ�ܹ���������п���λ��. ��ͼ3��ʾ, ��ͼ�Ľ�����ͨ����6���ɶȿռ��нṹ����ɢ��е�۵Ĺ����ռ���ɵ�. ����, ${\rm R}^{3}$�еĿɴ﹤���ռ䱻�ָ�ɵ�����������嵥Ԫ, ÿ����Ԫ����̬�ɴ���ͨ����Ԫ�ڽ����Ͼ��ȷֲ��ռ����ʵ��. �ɴ���ͼ�ɴ洢Ϊ�����ƾ���, ÿ�����ֵ����TCP�ֲ�����Ŀɴ���, ֵΪ1��ʾ�ɴ�, Ϊ0��ʾĩ��ִ�������ɴ�. �ɴ���ͼ�ļ�����Ի��ڻ�е�۵����˶�ѧ. ������, �����ռ���ɢΪ$n_{v}$�������嵥Ԫ, ÿ���ڽ�����ƽ���ֲ���$n_{d}$����, ÿ���ڽ����ϵĵ������$n_{z} $����ת.
ͼ3
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ3SE(3)��ɢ��
Fig.3Discretization of SE(3)
������Ϊ��е�۵IJ��������ṩ�˸�Ϊ�ḻ����Ϣ, ÿ�������嵥Ԫ��������ָ����Զ�������
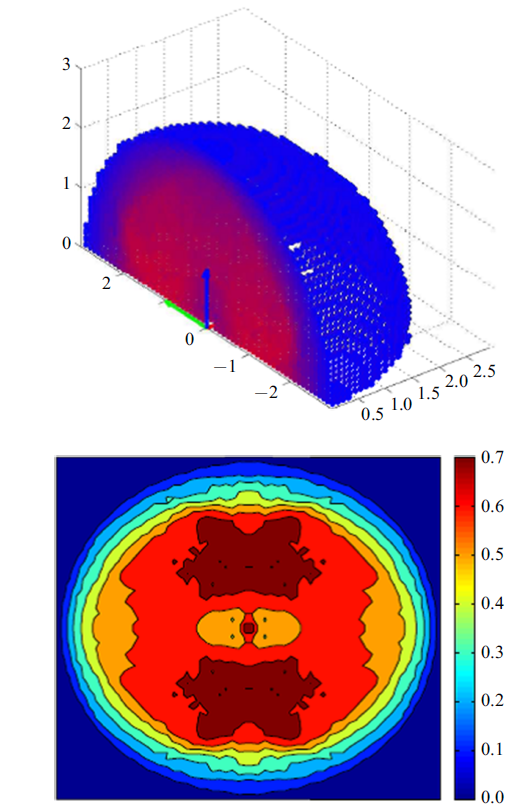
$V_{i} \left( a \right)$��ʾ�ɴ���ͼ���е�$i$�������嵥Ԫ�Ķ�����ֵ. $D_{i}$��Ч�ظ�����ÿ�������嵥Ԫ�в�ͬλ�˵Ŀɴ���ʲ�������������������. ��Ͽɴ�����������, ��ÿ�������嵥Ԫ��������ֵ����Ӧ����ɫ����, ���Թ�����е�۵�ץ������ͼ��, ��ͼ4��ʾ. ץ������ͼ�����˻�е�۹����ռ��п������ɲ���Ŀ��ij̶�, ���Ŀ����˶�Ԥ��, ����ȷ��ץ��ʱ�䴰�ڲ�����ץ���Ŀ�����.
ͼ4
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ4ץ������ͼ������ȸ���ͼ
Fig.4Capability map and section contour map
2.2 ץ��ʱ��ȷ��
�������о�δ��ֿ���ץ�������л�е�۵�ץ��������Ŀ����˶���ĩ��ִ�����Ľӽ����������, ��ͼ5��ʾ, ץ��ʱ��ȷ�������ڻ�е�۵�ץ��������������ʼ���͡�ץ������ϵ�Լ�Ŀ����˶�Ԥ��. ����, ���ڹ����ռ�$WS$����, ȷ��ץ��ʱ�䴰��; �˺�, ����Ŀ��ij�ʼ�˶�����, �������ŵ�δ��ʱ��, ��֤Ŀ���ϵ�ץ����λ������ͼ�����Ҿ��и��ߵ������ָ��, ����, ĩ��ִ������ץ����ľ���Ҫ������С, λ��ʸ��${ \rho }_{\rm eg} ={ r}_{\rm g} \left( t \right)-{ r}_{\rm e}^{\rm s}$��ץ������ϵʸ��$n_{x}$֮��ļн����辡����С, �Ӷ���֤�ӽ������ڽӽ�������. ���, ץ��ʱ��ȷ�������������������, $D_{i} \left( {{ r}_{\rm g} \left( t \right)}\right)$��ץ�����ڹ����ռ�$WS$��������ָ��, $n_{x} $����ת����${ R}_{\rm g}\left( t \right)$�ĵ�һ��. ������ʼ״̬, ${ r}_{\rm g} \left( t\right)$��${ R}_{\rm g} \left( t \right)$�ļ�����Ը���ʽ(4)�õ�.
ͼ5
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ5ץ��ʱ��ȷ��ʾ��ͼ
Fig.5Schematic diagram of determining optimal grasping time
3 ץ���滮�����
3.1 ��������
�ռ��е�۵�ץ���滮������ܵ�����ѧ��ϵ�Ӱ��, ����Ư��ģʽ�����ڷ�����Լ���Ĵ���, ��е�۸��ؽڵĹ�����·��������. ץȡ�滮���Ե�Ŀ����ȷ�����ŵ�ץ��ʱ�������ɿ��е�, ��Υ������Լ���Ĺؽ��˶��켣${ \theta }\left( t \right)$. һ�����, ץ�����Կ�����Ϊ����ʽԼ��$g_{i} \left({{ \theta }} \right)$���ʽԼ��$h_{i} \left( {{ \theta }}\right)$�µķ��Ż�����:3.2 Լ����Ŀ�꺯��
ץ���滮�е�Լ�����Է�Ϊ��ʽԼ���벻��ʽԼ��. �˶�״̬${ x}$�����ϱ�s, f, d�ֱ��ʾ��ʼ���ն˺�������λ��. ��ʽԼ����Ҫ���������ؽڵij�ʼλ�á���ʼ�ٶȺͳ�ʼ���ٶ�ͬ����, ץ���滮�IJ���ʽԼ������д����.
(1) �ؽ���: ץ����������Ҫ���ǹؽڵ��˶�����, ��֤���ؽڲ��������˶���Χ
(2) ץ������: �ο�ͼ1, ĩ��ִ�����Ľӽ��������������һ��ץ��������
(3) ��ײ���: ץ����������Ҫ��֤��е����Ŀ��֮�䡢���ؽ�֮�䲻������ײ
��������Ư���ռ�����˷�����Լ���Ĵ���, ������������ĩ��ִ�������ն�״̬�������������˶�ѧ, Ҳ�����ڶ���ѧ���ЧӦ. �ٶ�${ x}_{\rm e} =\left( {{ r}_{\rm e} ,{ q}_{\rm e} } \right)$��${ x}_{\rm b} =\left({{ r}_{\rm b} ,{ q}_{\rm b} }\right)$�ֱ��ʾĩ��ִ�����ͻ�����λ��, ��̬����������Ԫ��${ q}=\left\{{\eta ,\varepsilon } \right\}\in \mathbb{R}^{4}$��ʾ, �����Ԫ���ļ��㹫ʽ����
$\delta_{\varepsilon }=0$��ʾ������ת����ϵ�غ�. ���ڵ�λ��Ԫ��, ������ʽ(2)��ʽ(3), ������ĩ��ִ�������ն�λ�˼�������
${ J}_{q} =\left[-\varepsilon\ \ \eta { E}_{3} +\tilde{{\varepsilon }}\right]^{\rm T}/2\in \mathbb{R}^{4\times 3}$��$\dot{{\bar{{ \theta }}}}={{\rm d}{ \theta }}/{{\rm d}u}$. ͨ��Ӧ�������˶�ѧ, �����˶���ѧ����ķ���. �ն�λ��������λ�˵�ƫ��ɼ�������
������������, �ռ��е��ץ���滮���Կ������µ��Ż�ָ��.
(1) ����ĩ��ִ����״̬: ץȡ�滮Ҫ���е��ĩ��ִ�������ն�λ�ˡ��ٶ�Ҫ�����ܵ���Ŀ���ϵ�ץ������ƥ��. ���, �������µ��Ż�ָ��
(2) ��С����������: Ϊ����ͨ�š��۲��Ҫ��, ������ץ����������С����������. ���, �������µ��Ż�ָ��
(3) ������ɲ�����: ץȡ��ɺ�, ��Ҫ��Ŀ��������������˵Ȳ���, ���, ��Ҫ���ץ��������ɲ�����
3.3 �ؽڲ�����
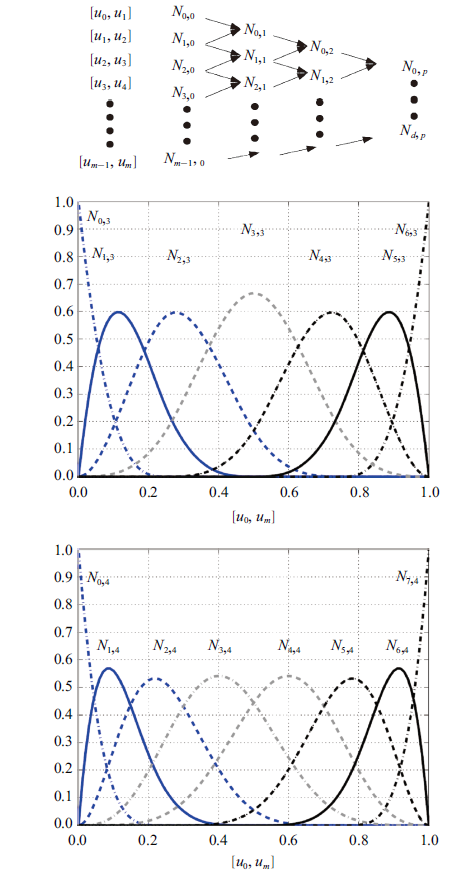
Ϊ��֤ץȡ�����йؽ�λ�á��ٶȡ����ٶȵ�������, �ο�����[14], ���ؽڵĹ켣$\theta_{i} \left( t\right)$���Բ�����Ϊ����ʽ����, ��Bezier����, ���Ҷ���ʽ���ߵ�. ������, ����B�����Թؽڽ��в�����. B���������Bezier���ߵĹ�����Ҫ�������Ϣ, �������߱������ŵ�: ����, B����������һ��Bezier����; ���, B�������߾߱�Bezier���ߵ���������; �ٴ�, B�����������Bezier�����ṩ�˸��õĿ��������. B�������ߵĽ״�������Ƶ�ĸ�����, �༴, �ɲ��õͽ����ߺ�����Ƶ��������˶�����. ����, B�������߾��оֲ���������, �ı�ijһ�����Ƶ㲢����ȫ�ֵĸı����ߵ���״, �����Զ��ڷ������Ż������е����ʮ������.����$d+1$�����Ƶ�$P_{i,0} ,P_{i,1} ,\cdots ,P_{i,d} $����$m+1$���ڵ�Ľڵ�ʸ��${ U}=\left\{ {u_{0} ,u_{1} ,\cdots ,u_{m} }\right\}$, $u_{0} \leqslant u_{1} \leqslant \cdots \leqslant u_{m} $, ����$p$�״ε�Clamped B����, �ڵ���ĩ�ڵ�����ظ���$p+1$, ���, ��Ӧ��$m+1$���ڵ�Ľڵ�ʸ��, $u_{0} =u_{1} =\cdots =u_{p} =0$��$u_{m-p} =u_{m-p+1} =\cdots =u_{m}=0$. �ؽڹ켣$\theta_{\rm i} \left( t \right)$��������Ϊ��һ����Clamped B��������
����$N_{j,p} $��B�����Ļ�����, ���Եݹ��������
��ʽͨ������ΪCox-de Boor�ݹ鹫ʽ. ֵ��ע�����$d$, $m$��$p$����$m=d+p+1$. ����$u$�ǹ�һ��ʱ��, ���ڹ켣��ִ��ʱ��$T=t_{\rm f}-t_{\rm s} $, �������$t=u\cdot T$, �ؽ��ٶȺͼ��ٶȿ��Լ�������
ʽ��
$\begin{eqnarray} && L_{i,j} =\dfrac{p}{u_{j+p+1} -u_{j+1} }\left( {P_{i,j+1} -P_{i,j} } \right) &&M_{i,j} =\dfrac{p-1}{u_{j+p} -u_{j} }\left( {L_{i,j+1} -L_{i,j} } \right) \end{eqnarray}$
������, ѡ���Ĵ�Clamped B��������$p=4,d=7,m=12$�Թؽڹ켣���в�����. B�������ߵĻ���������ɲο�ͼ6. ʽ(18)�йؽ��ٶȺͼ��ٶ�Լ����ͨ������ִ��ʱ������
����, ${ {C}'}={{\rm d}{ \theta }}/{{\rm d}u}$��${ {C}"}={{\rm d}^{2}{ \theta }}/{{\rm d}u^{2}}$. $t_{\rm g} -t_{\rm s} \geqslant T$��ζ�Ź켣ִ��ʱ���㹻��������ʽ(18), �ն�ʱ������趨Ϊ$t_{\rm f} =t_{\rm g} $; ����, ��Ҫ����$P_{i,j}$���¹����ؽڹ켣. ��ʽ(17)�еĵ�ʽԼ������ʽ(28)��ʽ(31)�ɵ�$P_{i,0}=P_{i,1} =P_{i,2} =\theta_{i}^{\rm s} $. ����$\theta_{i}^{\rm s}$��֪, �����ؽڹ켣��Clamped B����������״��������ʣ��Ŀ��Ƶ�$P_{i,3},P_{i,4} ,\cdots ,P_{i,d} $. ���ǵ��ռ��е�۵�$n$���ؽ�, ����${ p}=\big[ P_{1,3} ,P_{1,4} ,\cdots , P_{1,d}$, $P_{2,3}$, $P_{2,4}$, $\cdots ,P_{n,3}$, $P_{n,4}, \cdots, P_{n,d} \big]^{\rm T}$��Ϊ��Ʊ���, һ��${ p}$ȷ��, ����ȷ��ÿ���ؽڵĹ켣, �����õ�ץ���滮����. ���, ʽ(16)�е�ץ���滮�����ת��Ϊ���µ��Ż�����
ͼ6
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ6B��������������
Fig.6B spline basic functions calculation
�������⽫��������Ӧ����Ȩ�ص�����Ⱥ�Ż��㷨(PSO)�������, �㷨������������: �����ڿ��е����������ڳ�ʼ�����������ʼֵ������Ⱥ. ��������ά�ȼ�Ϊ��Ʊ�����ά��. Ȼ��, �����Ӷ�����Ӧ�Ⱥ�����������, �������ռ�������Ŀǰ��֪�������������(�ֲ�)����Ⱥ�е��������(ȫ��). �����ӵ��˶��ɾֲ���ȫ���������ָ��, ÿһ������һ��. �����ָ��õ�����ʱ, ��ѡ����һ������Ⱥ�˶���ָ������. �˹��̲����ظ�, ֱ�������ض��������������и��õĽ������. PSO�㷨ִ�й�����, ��Ҫ������δ���Լ����ѡ����ʵ���Ӧ�Ⱥ���, �ο�����[31,32], �����������н⼯�ķ������������еIJ���ʽԼ��Υ��; ��Ӧ�Ⱥ���ѡȡʽ(25)��������ÿ�����ӵ�����, ���洢���еĿռ��е��ץ���滮�⼯, �������ʽ(26)��ʽ(27)���ж�Ŀ���Ż��⼯��ѡȡ��ȷ��.
4 ������
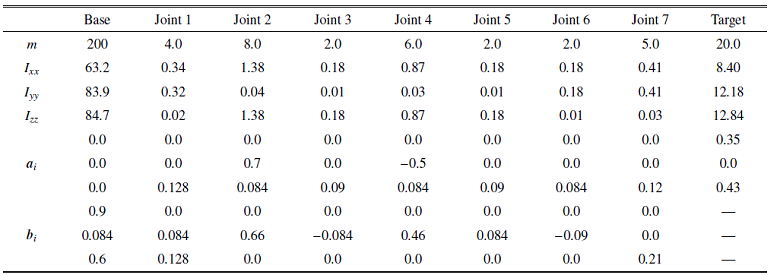
Ϊ��֤���������ץ���滮����, ���ڸ�����ץ������Ŀ��ķ�����֤. �ռ������ϵͳ��һ��7 DOF�˶�ѧ�����е�ۺ�6 DOF���������, �˶�ѧ�Ͷ���ѧ��������1�и���, ����${ a}_{i} $, ${ b}_{i} $��${ I}_{i} $�ڸ��˶����������ϵ�н�������. ��ץ��������, ���Ȼ��ڻ�е�۵�ץ������ͼ�ס���ʼ���͡�Ŀ���˶�Ԥ�����Ϣȷ������ץ��ʱ��$t_{\rm g}$. �˺�����PSO�㷨�������ʽ(33), ��������Clamped B�����Ĺؽڹ켣, ���ɿռ��е�۵�ץ���滮����.Table 1
��1
��1�ռ�������˶�ѧ�붯��ѧ����
Table 1
 |
�´��ڴ�|����CSV
�����Ŀ��������ϵ, ץ�����λ�˿�����Ϊ${ x}_{\rm g}$ = $\Big\{ \rho _{\rm tg}$, ${ R}_{\rm t}^{\rm g}\Big\}$. Ŀ��ij�ʼ״̬Ϊ${ x}_{\rm t}^{\rm s}$ = (2.4, 0.0, $-0.5$, 0.717, 0.717, 0.0, 0.0), Ŀ����������ת, ��ת���ٶ�$\omega_{\rm t}^{\rm s}$ = (8.594($^\circ$)/s, 2.865($^\circ$)/s, 0($^\circ$)/s). ���ڻ�е������������Ŀ����˶�Ԥ��, ����ץ��ʱ��Ϊ$t_{\rm f}=31.4$ s. ������ĩ��ִ����λ�˿��ɴ�ȷ��${ x}_{\rm e}^{\rm d}$ = (2.489, 0.197, $-1.010$, 0.761, $-0.498$, $-0.294$, $-0.294)$. ����, ����ץ������˶�, ������ĩ��ִ�������ٶ�Ϊ${\dot{{ x}}}_{\rm e}^{\rm d}$ = ($-0.013$, 0.075, 0.027, 0.132, $-0.008$, 0.086). ��е�۵ij�ʼ���ͼ����Ӧ��ĩ��ִ����λ��Ϊ${ \theta }^{\rm s}$ = ( 0, $-{\pi}/{3}$, 0 , ${\pi}/{4}$, 0, $-{\pi }/{12}$, 0) $\to$ ${ x}_{\rm e}^{\rm s}$ = (1.078, 0.252, $-1.853$, 1.0, 0.0, 0.0, 0.0). �����ij�ʼλ��Ϊ${ x}_{\rm b}^{\rm s} =$ (0.0, 0.0, 0.0, 1.0, 0.0, 0.0, 0.0), ����ʽ(25)�е���Ӧ�Ⱥ�����������Ⱥ�е������ӵ�����. ${ Q}_{\rm e}$��${ Q}_{v}$��ȷ��ȡ�����ն�λ�ˡ��ٶȵ�Ҫ��. ������, ������λ�����Ϊ0.01 m, ��̬���2$^\circ$, ���ٶ�����ٶ����Ϊ0.01, Ȩ�ؾ���${ Q}_{\rm e} $��${ Q}_{v}$��ȷ������
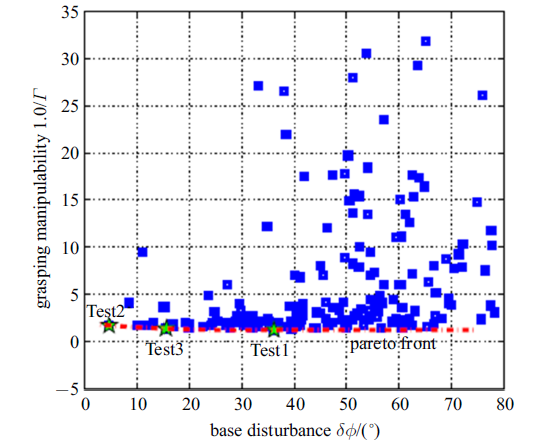
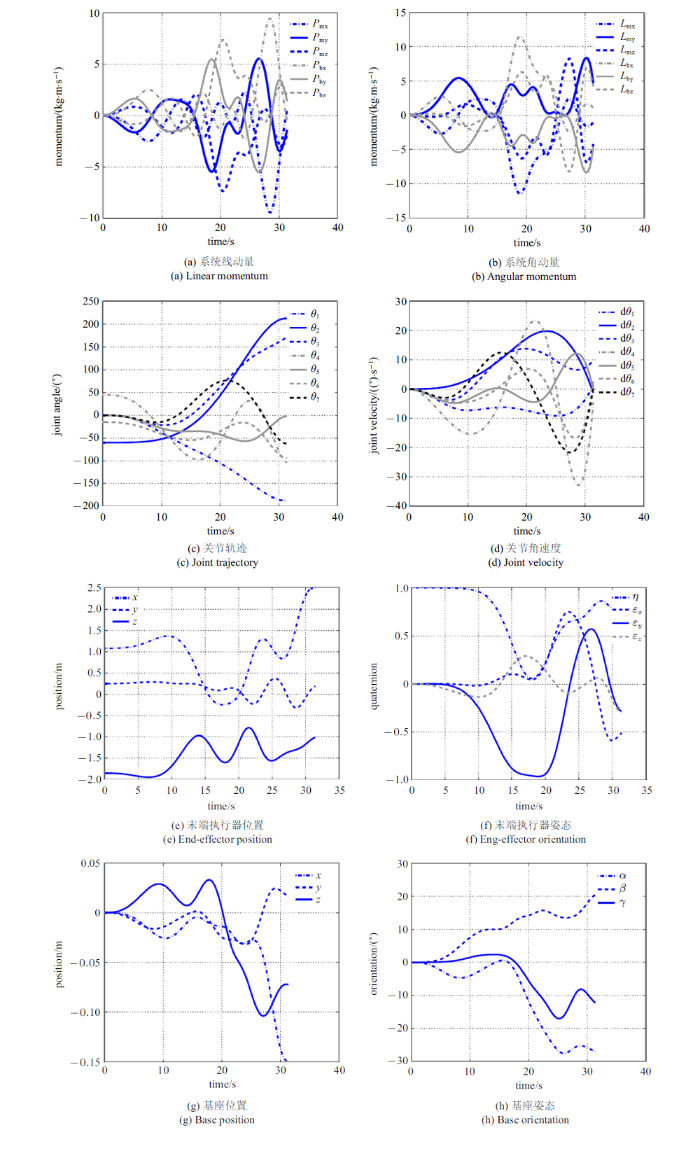
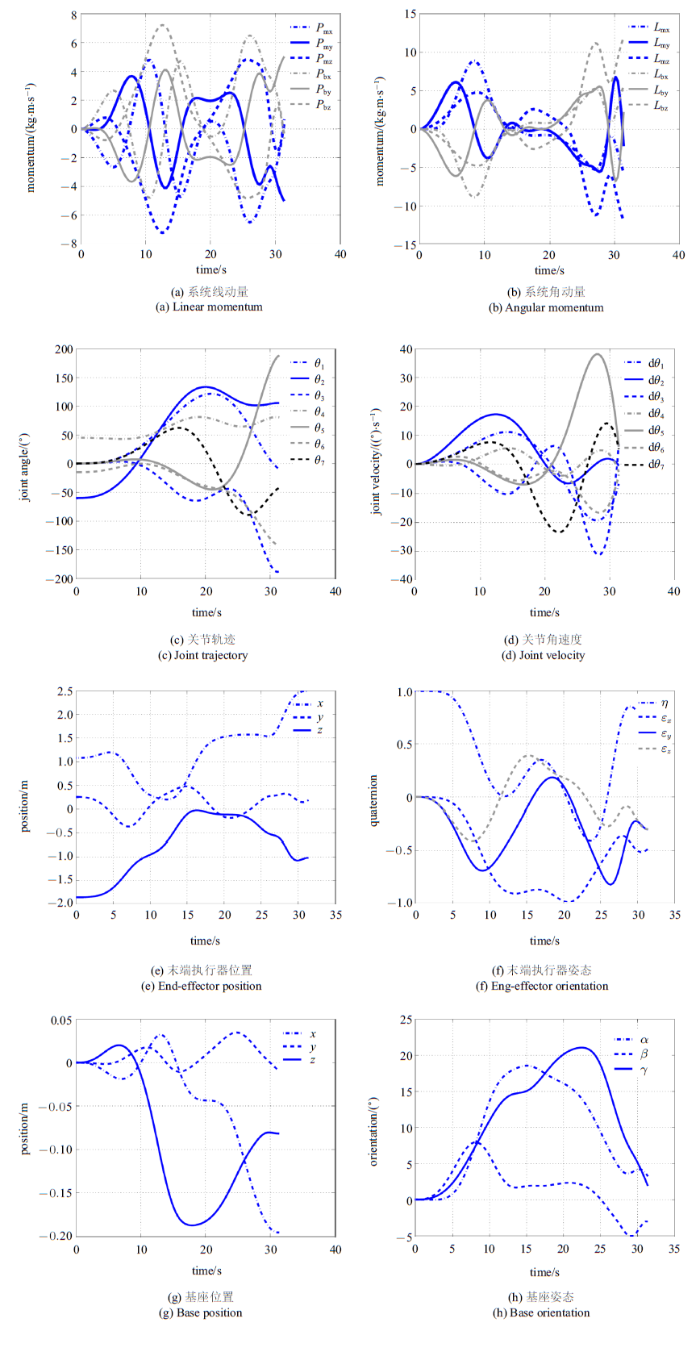
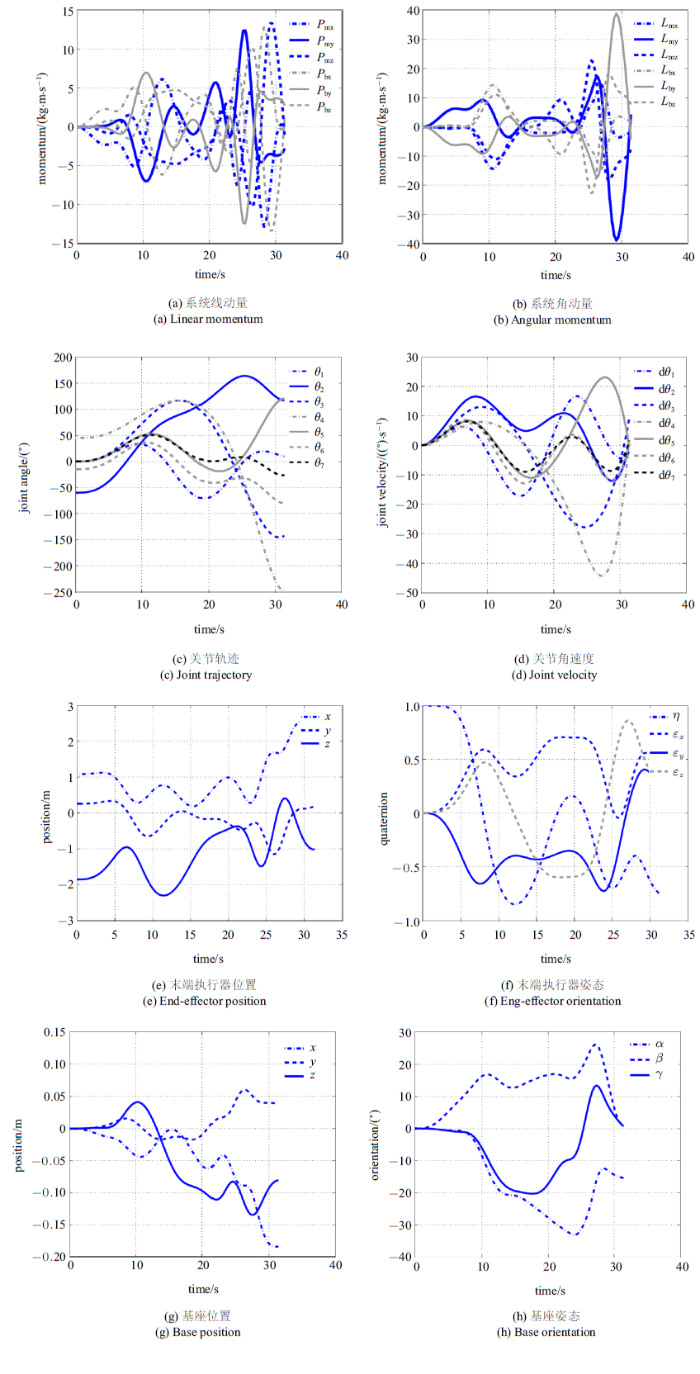
����PSO�������, ��ѡ�������¼�����۷Ǻ���Ŀ��ץ���滮����. �����¼��Ӧ�Ľ⼯�ɲμ���2. ���ʽ(26)��ʽ(27), ��ͬ�Ż�ָ�������ɵ�Paretoǰ����ͼ7��ʾ. ͼ8$\sim\!$ͼ10���������鲻ͬ�⼯��Ӧ�Ĺؽڹ켣��ĩ��ִ������������˶�����. ���Կ���, ���н⼯����������趨���ն�״̬���Ҫ��. ����, ץ�������б�֤�˿ռ������ϵͳ�Ķ����غ�. ���ն�ץ��ʱ��, ����Test1, ���յ����ɲ�����Ϊ0.818, �ܵĻ�����̬����Ϊ0.630; ����Test2, ���յ����ɲ�����Ϊ0.588, �ܵĻ�����̬����Ϊ0.083; ����Test3, ���յ����ɲ�����Ϊ0.736, �ܵĻ�����̬����Ϊ0.271. ���Կ���, ĩ��ִ��������ʵ���˶�Ŀ����ץ����λ�˺��ٶȵ�ƥ��, ͬʱ��С��������̬���ź����ĩ��ִ�������ɲ����������Ż�ָ����п���, ��ѡ��ͬ���Ż�ָ�����ս�Ӱ��ռ������ϵͳ���ն�״̬.
Table 2
��2
��2��Բ�ͬ�Ż�ָ��Ľ⼯
Table 2
 |
�´��ڴ�|����CSV
ͼ7
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ7Paretoǰ��
Fig.7Pareto front
ͼ8
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ8Test1��Ӧ�Ĺؽڹ켣��������ĩ��ִ����״̬
Fig.8Joint trajectories, base and end-effector's states for Test1
ͼ9
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ9Test2��Ӧ�Ĺؽڹ켣��������ĩ��ִ����״̬
Fig.9Joint trajectories, base and end-effector's states for Test2
ͼ10
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ10Test3��Ӧ�Ĺؽڹ켣��������ĩ��ִ����״̬
Fig.10Joint trajectories, base and end-effector's states for Test3
5 ����
�ռ������ץ���滮������, ��Ҫ���ǷǺ���Ŀ����˶��ͻ�е�۵�ץ������; ����, ������û�е���������Ķ���ѧ�������, ����Ч��߿ռ������ϵͳ��ȼ��������, ���ĵ���Ҫ������д����:(1)���ǻ�е��ץ��������Ŀ���˶���ĩ��ִ�����ӽ�����TCP��ץ������Ծ��������, ȷ���˿ռ��е�۵�����ץ��ʱ��, ��������ץ������ץ��ʱ�̵��ն�λ�˺��ٶ�;
(2)��������Ư���ռ�����˵ķ�����Լ��, ĩ��ִ�������˶��������������˶�ѧ, Ҳ��������ʷ�˶�·��. ���ڱ������᷽�������Jacobian��������, �˶�ѧ�붯��ѧ������õ��˹��;
(3)����Clamped B�������߶Ի�е�۹ؽڵĹ켣���в�����, ����ĩ��ִ�������ն�״̬�������Ż�; ����, ����С���������ź�������ɲ�������Ϊץ������Ż�ָ��.
��������֤�������㷨��Ӧ����ץ��ʱ���Ŀ���ȷ���������Ż���ץ���ؽڹ켣, �㷨����Ч��չ��Ӧ���ڶ�ۻ������ڹ�ץ������֮��. ���в����Ͳ�����ȷ���Ե�³��Э�������ڱ�����δ��ֿ���, �������ĵ�δ������֮һ.
�ο����� ԭ��˳��
������ȵ���
������������
�����ڿ�Ӱ������
[��������: 1]
[��������: 1]
DOIURL [��������: 1]
[��������: 1]
[��������: 1]
DOIURL [��������: 1]
[��������: 1]
DOIURL [��������: 1]
[��������: 1]
DOIURL [��������: 1]
[��������: 1]
DOIURL [��������: 2]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
DOIURL [��������: 1]
[��������: 1]
DOIURL [��������: 1]

Visually guided robotic capturing of a moving object often requires long-term prediction of the object motion not only for a smooth capture but because visual feedback may not be continually available, e. g., due to vision obstruction by the robotic arm, as well. This paper presents a combined prediction and motion-planning scheme for robotic capturing of a drifting and tumbling object with unknown dynamics using visual feedback. A Kalman filter estimates the states and a set of dynamics parameters of the object needed for long-term prediction of the motion from noisy measurements of a vision system. Subsequently, the estimated states, parameters, and predicted motion trajectories are used to plan the trajectory of the robot's end-effector to intercept a grapple fixture on the object with zero relative velocity (to avoid impact) in an optimal way. The optimal trajectory minimizes a cost function, which is a weighted linear sum of travel time, distance, cosine of a line-of-sight angle (object alignment for robotic grasping), and a penalty function acting as a constraint on acceleration magnitude. Experiments are presented to demonstrate the robot-motion planning scheme for autonomous grasping of a tumbling satellite. Two robotics manipulators are employed: One arm drifts and tumbles the mockup of a satellite, and the other arm that is equipped with a robotic hand tries to capture a grapple fixture on the satellite using the visual guidance system.
DOIURL [��������: 1]
�ռ�˫�ۻ�����ץ��Ŀ���ǻᵼ����ײ�������ײ���������ϵͳ������̬�仯�����⣬���һ�ֻ�������Ⱥ�㷨����ײǰ�����Ż��������÷������ȸ�������ײǰ����ײ��Ķ���ѧģ�ͣ�Ȼ����ݳ���—���������Ƶ�����ײ�ζ���ѧ���̣���������������Ⱥ�㷨��������ײǰ���滮��ֵ������ʹ��ײ�Ի�����ϵͳ�Ƕ�����Ӱ�쾡��С��ͨ������У���˸÷�������Ч�ԣ��ҵ������ڿռ������ץ��Ŀ���ǵĽ��������ײǰ���͡���
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��ʿ����].
[��������: 1]
[PhD Thesis].
[��������: 1]
[��������: 1]
[��������: 1]
DOIURL [��������: 1]
[��������: 1]
[PhD Thesis].
[��������: 1]
DOIURL [��������: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}