DYNAMICS MODELING AND EXPERIMENT OF A FLEXIBLE CAPTURING MECHANISM IN A SPACE MANIPULATOR 1)
Li Haiquan,*,2), Liang Jianxun*, Wu Shuang?, Liu Qian?, Zhang Wenming?*School of Aerospace Engineering, Tsinghua University, Beijing 100084, China ?Beijing Key Laboratory of Intelligent Space Robotic System Technology and Applications, Beijing Institute of Spacecraft System Engineering, Beijing 100094, China
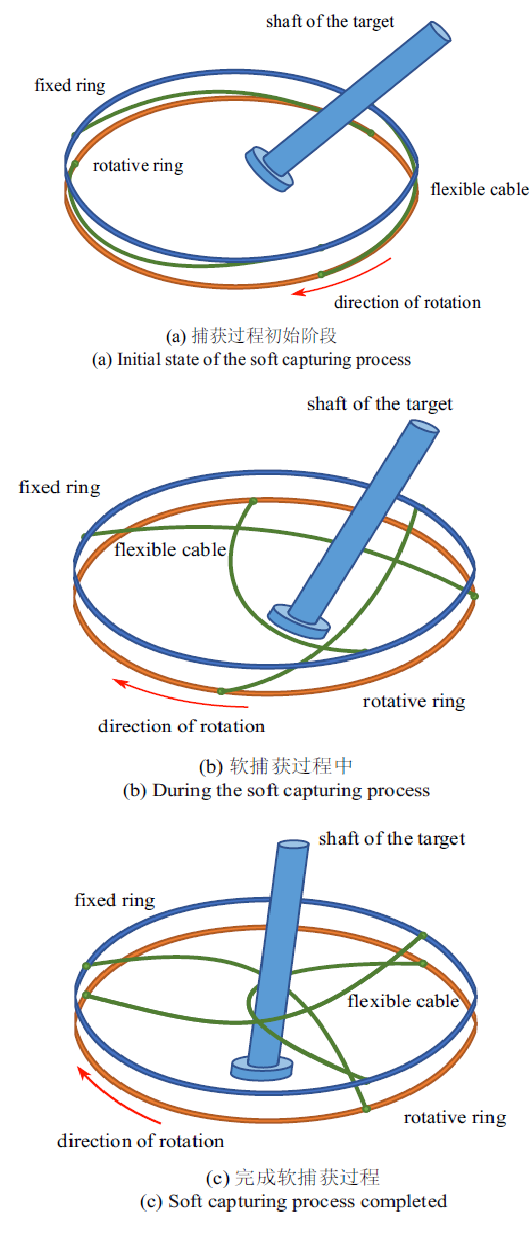
Abstract An end-effector with flexible capturing mechanisms, which can accomplish on-orbit capturing operations with large tolerance, is a vital component of a large-scale space manipulator. Dynamics modeling and theoretical analysis of the flexible capturing mechanisms are very important for on-orbit servicing task simulation and prediction. In this paper, a dynamics model of a flexible capturing mechanism with three cables in a space end-effector is developed firstly. The three-dimensional absolute nodal coordinate formulation (ANCF) is used to create nonlinear finite elements of flexible cables. Both bending and longitudinal deformation of the cables are considered, furthermore, contact between the flexible cables and the rigid target is analyzed by introducing an intermediate cylinder reference coordinate system. Then, an experiment with passive spring suspension is built to validate the proposed model and signals of both motions and forces of the target are collected and compared with the simulation results. The comparison shows that the values of the simulation match well with the experimental measuring ones. The presented model could be used as supplements for the two-dimension planar air-bearing experiment and could be used for capturing task simulations of large-scale space manipulators. At last, capturing simulations of two representative on-orbit operations are conducted by co-simulation with the proposed model and a dynamics model of a large-scale space manipulator. One of the operations is the soft capturing process of an inspection task on the spacecraft surface, the other is the soft capturing of a floating target. The main difference between the two simulations is that the target in the first simulation is fixed on the base of the manipulator. Results of these simulations show that the soft capturing process can be accomplished on the prescribed condition. Keywords:space manipulator;on-orbit servicing;end-effector;contact dynamics;ground verification
PDF (1180KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文 本文引用格式 李海泉, 梁建勋, 吴爽, 刘茜, 张文明. 空间机械臂柔性捕获机构建模与实验研究 1). 力学学报[J], 2020, 52(5): 1465-1474 DOI:10.6052/0459-1879-20-106 Li Haiquan, Liang Jianxun, Wu Shuang, Liu Qian, Zhang Wenming. DYNAMICS MODELING AND EXPERIMENT OF A FLEXIBLE CAPTURING MECHANISM IN A SPACE MANIPULATOR 1). Chinese Journal of Theoretical and Applied Mechanics[J], 2020, 52(5): 1465-1474 DOI:10.6052/0459-1879-20-106
仿真结果与实验结果三方向位移误差取绝对值后求平均值分别为$x$方向0.27 mm, $y$方向2.68 mm和$z$方向5.99 mm. 三方向受力绝对平均误差分别为$x$方向0.99 N, $y$方向1.48 N和$z$方向2.12 N. 仿真结果误差主要来源于测量误差和建模误差, 其中, 运动捕捉系统和力传感器都存在一定的测量误差, 同时运动信息的误差在坐标系转换过程中会对力信息误差产生一定影响. 另一方面, 由于仿真模型中对悬吊装置进行了简化, 未考虑悬吊点的间隙和附加绳索电缆等不确定性因素, 因此仿真模型边界条件存在一定误差.
Flores-AbadA, MaO, PhamK, et al. A review of space robotics technologies for on-orbit servicing Progress in Aerospace Sciences, 2014,68:1-26 [本文引用: 1]
YaoHX, RenWY, MaO, et al. Understanding the true dynamics of space manipulators from air-bearing based ground testing Journal of Guidance, Control, and Dynamics, 2018,41(11):2425-2434 [本文引用: 1]
( LiuQian, XiaoXuan, ChengJing, et al. Study on hardware-in-the-loop simulation facility for task verification of space manipulator Manned Spaceflight, 2019,25(2):227-235 (in Chinese)) [本文引用: 1]
( YuSimiao, ZhengShutao, YangYu, et al. Characteristics analysis of hardware-in-the-loop simulation system for manipulator flexible docking Journal of Harbin Institute of Technology, 2019,51(7):24-32 (in Chinese)) [本文引用: 1]
( CaoDengqing, BaiKunchao, DingHu, et al. Advances in dynamics and vibration control of large-scale flexible spacecraft Chinese Journal of Theoretical and Applied Mechanics, 2019,51(1):1-13 (in Chinese)) [本文引用: 1]
( FuXiaodong, ChenLi. An input limited repetitive learning control of flexible-base two-flexible-link and two-flexible-joint space robot with integration of motion and vibration Chinese Journal of Theoretical and Applied Mechanics, 2020,52(1):171-183 (in Chinese))
( ZhuAn, ChenLi. Mechanical simulation and full order sliding mode collision avoidance compliant control based on neural network of dual-arm space robot with compliant mechanism capturing satellite Chinese Journal of Theoretical and Applied Mechanics, 2019,51(4):1156-1169 (in Chinese)) [本文引用: 1]
FengF, TangLN, XuJF, et al. A review of the end-effector of large space manipulator with capabilities of misalignment tolerance and soft capture Science China $($Technological Sciences$)$, 2016,59(11):1621-1638 [本文引用: 1]
( JieDangyang. Study on capture control of a large space manipulator end effector and transporting trajectory [PhD Thesis] Harbin: Harbin Institute of Technology, 2012 (in Chinese)) [本文引用: 1]
( FengFei. Research on space large misalignment tolerance end-effector and its soft capture strategy.[PhD Thesis] Harbin: Harbin Institute of Technology, 2013 (in Chinese)) [本文引用: 3]
( PanDong, WeiCheng, TianHao, et al. Capturing dynamics and experiment of the space large end effector Journal of Astronautics, 2014,35(10):1120-1126 (in Chinese)) [本文引用: 1]
ZhangY, WeiC, PanD, et al. A dynamical approach to space capturing procedure using flexible cables Aircraft Engineering and Eerospace Technology, 2016,88(1):53-65 [本文引用: 1]
ZhangY, WeiC, ZhaoY, et al. Adaptive ANCF method and its application in planar flexible cables Acta Mechanica Sinica, 2018,34(1):199-213 [本文引用: 1]
( RongJili, XinPengfei, ZhugeXun, et al. Capturing dynamics of flexible ropes for space large-scale end effector Acta Armamentarii, 2016,37(9):1730-1737 (in Chinese)) [本文引用: 1]
( ZhangLong. Dynamics modelling and contact-impact analysis during space snare capture Journal of Vibration and Shock, 2019,38(10):71-78 (in Chinese)) [本文引用: 1]
( SunJialiang, TianQiang, HuHaiyan. Advances in dynamic modeling and optimization of flexible multibody systems Chinese Journal of Theoretical and Applied Mechanics, 2019 51(6):1565-1586 (in Chinese)) [本文引用: 1]
ShabanaAA. Dynamics of Multibody System. New York: Cambridge University Press, 2005 [本文引用: 1]
GerstmayrJ, ShabanaAA. Analysis of thin beams and cables using the absolute nodal co-ordinate formulation Nonlinear Dynamics2006,45:109-130 [本文引用: 2]
LiuC, TianQ, HuHY. New spatial curved beam and cylindrical shell elements of gradient-deficient absolute nodal coordinate formulation Nonlinear Dynamics, 2012,70(3):1903-1918
( FanJihua, ZhangDingguo, ShenHong. Research on elastic line method based on absolute nodal coordinate method Chinese Journal of Theoretical and Applied Mechanics, 2019,51(5):1455-1465 (in Chinese))
( GuoJiawen, WeiCheng, TanChunlin, et al. Analysis of the cored stranded wire rope on the nonlinear bending dynamic characteristics Chinese Journal of Theoretical and Applied Mechanics, 2018,50(2):373-384 (in Chinese))
WangBJ, LiQB, LiuTY, et al. Analysis of cable under dynamic contact and large deformation Ksce Journal of Civil Engineering, 2019,23(4):1626-1635
( QiZhaohui, GuoShudong, ZhuoYingpeng. Rope elements with moving nodes in rope-pully systems Chinese Journal of Theoretical and Applied Mechanics, 2019,51(6):1856-1871 (in Chinese)) [本文引用: 1]
LiYY, WangC, HuangWH. Dynamics analysis of planar rigid-flexible coupling deployable solar array system with multiple revolute clearance joints Mechanical Systems and Signal Processing2019,117:188-209 [本文引用: 1]
FuKJ, ZhaoZH, RenGX, et al. From multiscale modeling to design of synchronization mechanisms in mesh antennas Acta Astronautica, 2019,159:156-165
TangLL, LiuJY. Modeling and analysis of sliding joints with clearances in flexible multibody systems Nonlinear Dynamics, 2018,94:2423-2440 [本文引用: 1]
SunDW, LiuC, HuHY. Dynamic computation of 2D segment-to-segment frictionless contact for a flexible multibody system subject to large deformation Mechanism and Machine Theory, 2019,140:350-376 [本文引用: 1]
LanP, CuiYQ, YuZQ. A novel absolute nodal coordinate formulation thin plate tire model with fractional derivative viscosity and surface integral-based contact algorithm Proceedings of the Institution of Mechanical Engineers Part K-Journal of Multi-Body Dynamics, 2019,233(3):583-597
CuiLL, WangHS, ChenWD. Trajectory planning of a spatial flexible manipulator for vibration suppression Robotics and Autonomous Systems, 2020,123:1-11
ChenYZ, ZhangDG, LiL. Dynamic analysis of rotating curved beams by using Absolute Nodal Coordinate Formulation based on radial point interpolation method Journal of Sound and Vibration, 2019, 441: 63:83 [本文引用: 1]
WuS, MouFL, LiuQ, et al. Contact dynamics and control of a space robot capturing a tumbling object Acta Astronaut, 2018,151:532-542 [本文引用: 1]
NegrutD, RampalliR, OttarssonG, et al. On an implementation of the Hilber-Hughes-Taylor method in the context of index 3 differential-algebraic equations of multibody dynamics Journal of Computational and Nonlinear Dynamics2007,2(1):73-85 [本文引用: 1]
( WeiQingqing, LiuZhiquan, WangYaobing, et al. Impedance control of space flexible manipulator system assisted docking of space station Chinese Space Science and Technology, 2014,6:57-64 (in Chinese)) [本文引用: 1]
( LiDaming, RaoWei, HuChengwei, et al. Key technology review of the research on the space station manipulator Manned Spaceflight, 2014,20(3):238-242 (in Chinese)) [本文引用: 1]
 ,*,2), 梁建勋*, 吴爽?, 刘茜?, 张文明?
,*,2), 梁建勋*, 吴爽?, 刘茜?, 张文明?
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT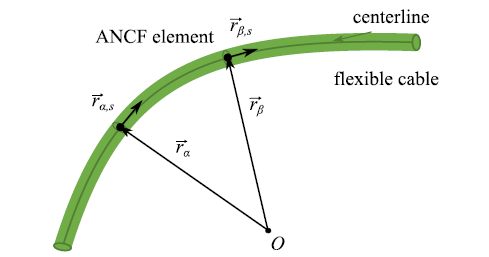 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT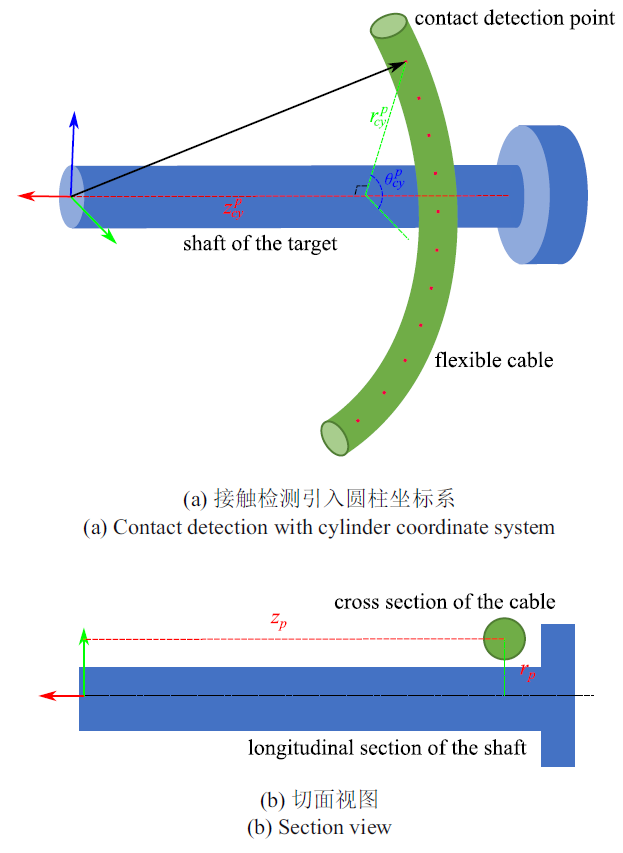 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT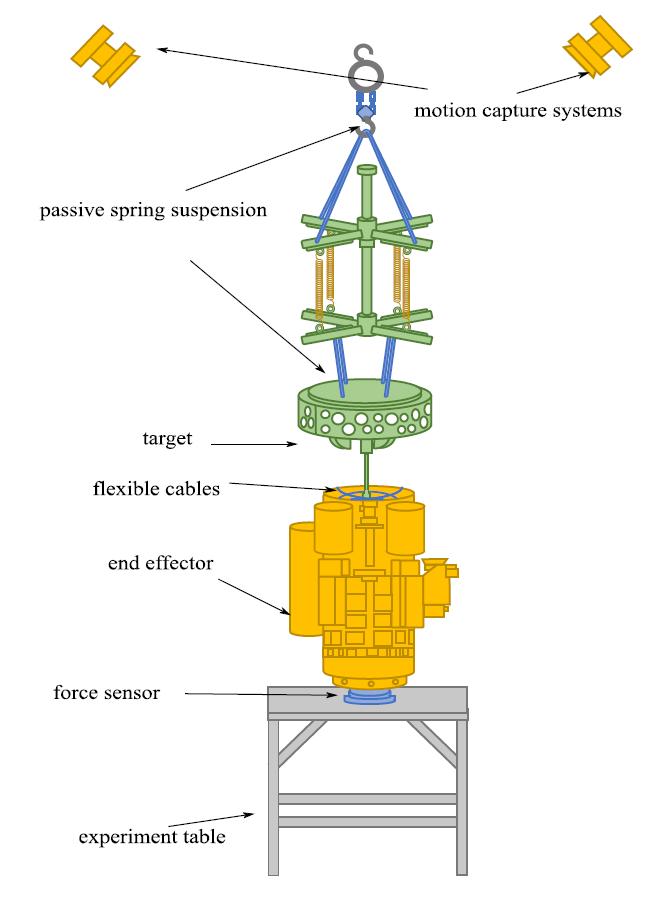 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT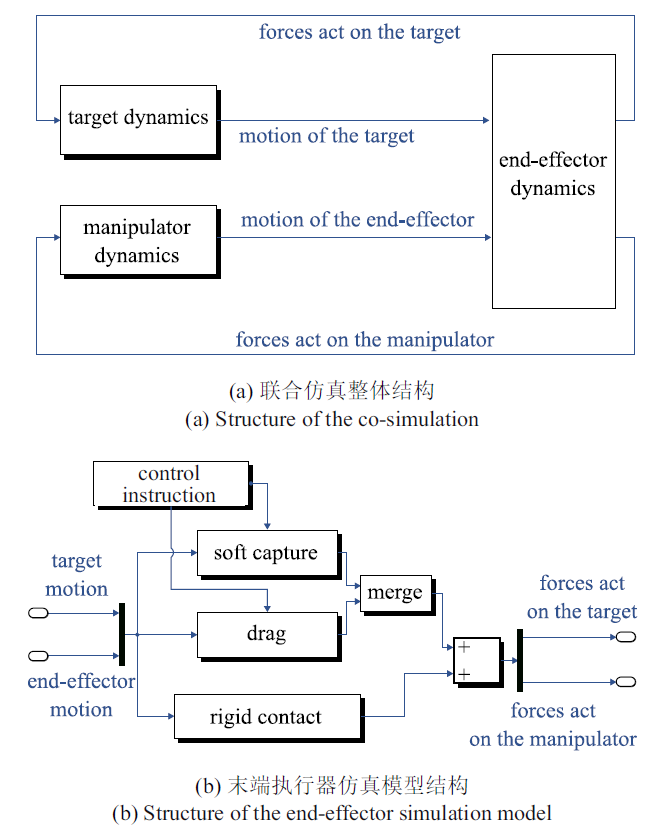 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT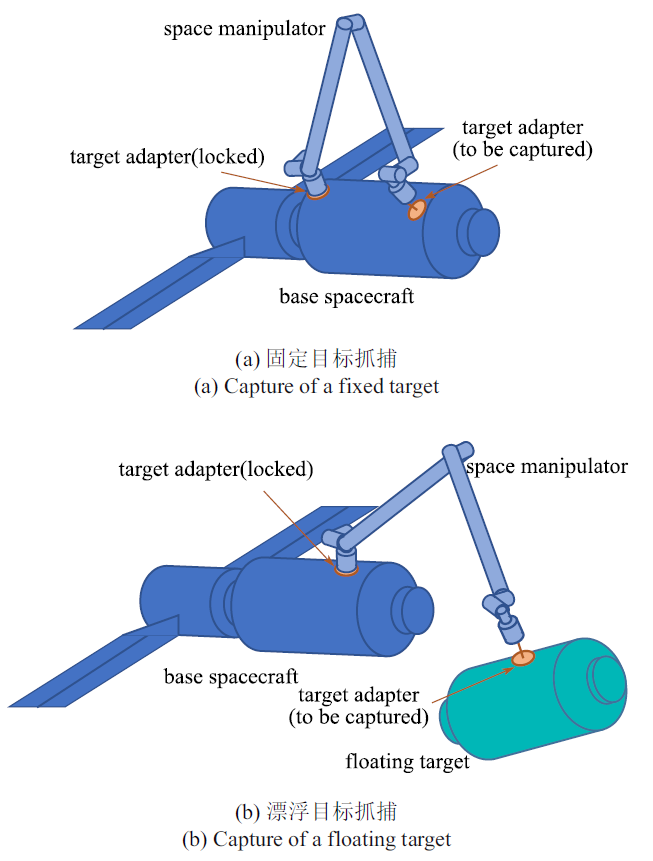 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}