 ,1), ����, ����й����ػ�������о�Ժ,���� 100071
,1), ����, ����й����ػ�������о�Ժ,���� 100071FAST OPTIMIZATION METHOD OF REENTRY TRAJECTORY CONSIDERING AERODYNAMIC PARAMETER PERTURBATION
Yang Ben,1), Lei Jianchang, Wang YuhangChina Academy of Launch Vehicle Technology,Beijing 100071, ChinaͨѶ����: 1) �,����ʦ,��Ҫ�о�������������ѧ�����. E-mail��silenceyb@sina.com
�ո�����:2020-04-14��������:2020-09-27�����������:2020-11-18
Received:2020-04-14Accepted:2020-09-27Online:2020-11-18
����� About authors

ժҪ
��Դ�ͳ����켣�Ż����������ٶ������Գ�ֵ���г̶ȸߵȵľ�����,�����һ�ֻ��������Ż�������켣������ⷽ��.�÷��������ǵı仯����Ϊ������,�Ľ�������������,���ǵ�������ֵ�Ż�������������ֵ��ɢ��ʽ�����ľ�ݻ�����,���� B ����������ɢ������,ͬʱΪ�����㷨�ڳ�ʼ����ֵ��������α�����е�����,���Ӷ������������,ͨ��һ��"����ֱ��"�����ķ���,����㷨���ȶ��ԡ������Ժ�Ѱ�Ž���Ĺ⻬��.Ϊ�о���������������е����������Ŷ�����,���ò������١�����ʵ��,����Ч�ʸߵĹ���������ʽ�����о�����,�����˻��ڹ���������ʽ���Ż����ϵ�����켣³���Ż�ģ��,��ģ�����Ż������п������������Ŷ���Ѱ�Ž����Ӱ������,�����˴�ͳ�켣���Ƶ��ɵĸ��ӵ�����ƻ���,����Ч�����Ż��켣�����������Ŷ������г̶�,������������ȷ�������ĸ�����,��Ȼ���Ա�֤������˳����ȫ����ɷ�������.���,������ij���ظ�ʹ�÷���������������Ϊ��,��֤�˻��������Ż�������켣�Ż������Ŀ������Լ�³���Ż�ģ�Ͷ����������Ŷ��Ŀ�����������,�����˸÷�������һ���Ĺ���Ӧ����.
�ؼ��ʣ�
Abstract
In view of the limitations of the traditional reentry trajectory optimization method, which has slow convergence speed and high sensitivity to initial values, a fast algorithm for reentry trajectory based on sequential convex optimization is proposed. The method takes the change rate of inclination angle as the control variable which improves existing convex strategy and uses B-spline curve to discretize the control variable, which can effectively suppress the sawtooth phenomenon in the process of numerical optimization due to the numerical discrete method. At the same time, to avoid the problem that the algorithm appears pseudo-infeasible near the initial guess value, additional virtual control and a "backtracking straight line" search method are added to improve the stability of the algorithm, these can improve the stability, rapidity and smoothness of the algorithm. In order to study the aerodynamic parameter perturbation in the reentry process of aircraft, a generalized polynomial chaotic theory research method with few sampling points, easy implementation and high computational efficiency is proposed. A robust optimization model of reentry trajectory based on the combination of generalized polynomial chaos and convex optimization is established. The model considers the effect of aerodynamic parameter disturbance on the optimization results during the optimization process, which can avoid the complex iterative design of conventional trajectory and guidance law. What's more, it can effectively reduce the sensitivity of optimal trajectory to aerodynamic parameter perturbation, and under the disturbance of uncertain aerodynamic parameters, which still can ensure the safety of the aircraft smooth completion of the mission. At the end,taking the reentry mission of a reusable aircraft in the United States as an example, the rapidity of reentry trajectory optimization method based on sequence convex optimization and the anti-interference ability of robust optimization model to aerodynamic parameter perturbation are verified and it shows that this method has certain engineering application.
Keywords��
PDF (8510KB)Ԫ������ά�����������������EndNote|Ris|Bibtex�ղر���
�������ø�ʽ
�, ����, ���. �������������Ŷ�������켣�����Ż�����. ��ѧѧ��[J], 2020, 52(6): 1610-1620 DOI:10.6052/0459-1879-20-117
Yang Ben, Lei Jianchang, Wang Yuhang.
����
��������������������ڴ������ڽ��г�ʱ�䡢Զ���롢���������ķ���,�ڼ���ܵ����临�ӵķ�������������ѹ������Լ���Լ��ն˵ĸ߾���Լ��,ʹ��켣�滮�����Ϊ��һ��������ս�Ե�����,�����˹���������****���о���Ȥ[1]. ��ͳ�����뵯���Ż���Ʒ�����Ҫ�л��ڼ���ֵԭ���ļ�ӷ��ͻ��ڷ����Թ滮���۵�ֱ�ӷ�[2]���Ż��㷨,�������ļ�����,����������,��ֻ�ʺ����ߵĹ켣�Ż�[3-6]. ��Ȼ����ɻ������õĻ����������ٶ�����Ĺ켣�滮[7],��ȡ�ù��Ի͵ijɼ�,���÷����ļ��������˷������Ļ�������. �ܵ���˵,���ڼ���ֵԭ����ֱ�ӷ��Ƶ����Ž�Ĺ��̽�Ϊ����,���ڸ������⼸�����õ�������;��α��Ϊ������ֱ�ӷ��Զ�εȸ�������Ľ�ģ���̱Ƚ��鷳;��������Ⱥ�����ִ�����ʽ�㷨���ڼ��������Ż�������ĸ���ģ���Ż�����,�跴�����桢���졢����,����Ч�ʽϵ�.ǿ����ԡ�ǿ�����Ծ���������켣�滮��������ֱ�����,ͨ����Ҫ����һϵ����������������ƽ�ԭ����. �Ż����ж���ʽ���Ӷ�,�ֲ����Ž⼴ȫ�����Ž���ص�,���϶��ص��ڵ㷨,ʹ����ѧ��������Ĺ滮���⼸����ָ�����Ż�[8-9]. ��������������ѧ��Acikmese ��[10-15]���翪չ�˻����Ż��Ĺ켣�Ż��о�.Acikmese ��[10-11]��Ի�������½������������������� (losslessconvexification) �ĸ���,ʹ���ɳڵ���ʽԼ������ԭ��Լ��,��ԭ����ת��Ϊ����,�����ü���ֵԭ���Զ��ߵĵȼ��Խ�����֤��,��֤ת�����̵�"������".��Ծ��з�Լ����һ����ʽ����ϵͳ���ſ�������,Acikmese ��[12-13]�������������ķ���,��ԭ�������Ż�����ĵȼ��Խ�����֤��. ��������о��ɹ��Ѿ��� NASA �� G-FOLD ���������еõ��˳ɹ�Ӧ��[14].
������,����****���ڳ��Խ��Ż����뵽����켣�滮��������[15-20].Liu ��[15]�ڸ������������������,ͨ�������滻�õ�������Ϊ�Ա����Ķ���ѧ����,���������Ż����������켣�Ż�����.Wang ��[16]����ʱ��Ϊ�Ա����������ǵĵ���Ϊ������,������ն�ʱ��̶��Ĺ켣�滮.���еĻ����Ż��Ļ�������켣�滮���������϶�ֱ��ʹ����С�Ŷ����Ի��������ַ��̵ķ�����ͬʱ��Ӧ��������������Լ������֤��������ԭ����ƽ�.��ȻĿǰ�������Ż���������,Ѱ��ʱ��ϴ�ͳֱ�ӷ���һ������,������ʵ�ʷ�������л���������������: (1)���������������Ż����������ϻ���ţ�ٷ�,��������ΧС,�����ڵ������ڿ��ܻ����������ţ�ٷ��� Maratos ЧӦ,���µ���Ѱ��ʧ��; (2)����ֵ���ıȽϴֲ�ʱ,������Ŀ����Խ���һ���Ͼ�������,���ܳ���"α������"[17] (artificialinfeasibility),�����ʹ�õ���ʧ��.
������������Ż��IJ���֮��,��������˼��ָ����������Եķ���. ����ͨ���������������,�ɱ�������������ڿ��������IJ��������"α������"����,�����㷨�Գ�ʼ�ο��켣������.���ͨ�� B ����������ɢ������,����������ɢ�����ľ�ݻ�����.���,����һ��"��������"�ķ���,���Ƶ���������״̬������,�Ӷ��ӿ��㷨������.
�ڸ߳����ٷ�����ʵ�ʵ�������й�����,���������Ŷ��Լ����������Ŷ��������켣����һ����Ӱ��. ���еĻ��������Ż��Ĺ켣�Ż�����,������ȷ���Թ켣�Ż�����,�����Ż��Ĺ�����δ���Dz����Ŷ��ͳ�ֵ��ȷ���Զ��Ż��켣��Ӱ��. ������������Ƶ���������Ŀ�����,�߳����ٷ�����һ���ܵ���ȷ���Ŷ�����ŵ�Ӱ��,���ܻ�ƫ��Ԥ���Ż��켣,��������Ԥ���趨�Ĺ���Լ�����ն�Լ���Լ��������ȵ���Լ��,�������ܳ��ַ�������ʴ����¹�. ���,�ڹ켣�Ż���ƵĹ�����,����ȷ���ԵĶ���ѧ��ģ����֮��,����Ҫ�ۺϿ��Dz����Ŷ���Ӱ��,��ɸ��Ӳ�ȷ�������µĸ߳���������켣���Ż����,���������й켣��³����.
Ŀǰ³���켣�Ż������ڸ߳���������Ӧ�ý���. Rangaraj ��[21]���ö���ʽ���緽�������һ�ָĽ������˲���,�봫ͳ�������˲������,����Ч�ʴ�����. Xiong ��[22]���һ����в�ȷ���ԵĹ켣�Ż�����,����ȷ����·��Լ��ʹ�ö���ʽ���緽����ʾΪ��ֵ�ͷ����Լ��,��������Ч��. Li ��[23]�����һ�ֽ���ȷ��Լ��ת��Ϊȷ�����Ż��ķ�����Ķ���ʽ������й켣�Ż�����. Michael ��[24]��ֱ�ӷ����иĽ�,�����һ�ֿ���³���켣�Ż�����. �����ϸ�˹α���Ͷ���ʽ�������۵�³���켣�Ż�����Ҳ��Ϊ�о����ȵ�[24-26].
����Ϊ�о���������������е����������Ŷ�����,����˲������١�����ʵ��,����Ч�ʸߵĹ���������ʽ�����о�����,�����˻��ڹ���������ʽ���Ż����ϵ�����켣³���Ż�ģ��,��ģ�Ϳ���Ч�����Ż��켣�����������Ŷ������г̶�,�ڲ�ȷ�������ĸ�����,չ�ֳ��˽�ǿ��³���ȶ���.
1 ȷ���Թ켣�Ż�ģ��
1.1 ���붯��ѧ����
���ǵ�����ת��Ӱ��,������������������������˶���������,$r,\theta ,\phi ,V,\gamma ,\psi $ �ֱ�Ϊ�����ٻ��ĵ��ľࡢ���ȡ�γ�ȡ��Ե��ٶȡ������ǡ������,���ľఴ����ƽ���뾶��һ��,�Ե��ٶȰ���һ�����ٶȹ�һ��. �ٶ� $\sigma $ Ϊ����,$\varOmega _{g} $ Ϊ������ת���ٶ�,��� $\sqrt {{g_0 } /{R_0 }}$ ��һ��,�����ٻ����� $L$������ $D$ �ı���ʽΪ
����,$\rho $ �Ǵ����ܶ�,Ϊ������,����ָ����ʽ�Ĵ���ģ�� $\rho = \rho _{0} \exp \left( { - \beta h}\right)$,$S$ Ϊ�������������ο����,����ϵ�� $C_{L} $������ϵ�� $C_{D}$ ����Ϊ�ǹ��Ǻ��������ĺ���.
1.2 ����Լ��
���������������,Ϊ��֤��������ijɹ�,��������������ѹ�����ص�·��Լ��,�ɱ�ʾΪ����,$\dot {Q}$, $ q$ �� $n$ �ֱ�Ϊ�����ܶȡ���ѹ������,$ k_Q $ Ϊ�����ܶ�ϵ��,$\dot{Q}_{\max }$, $ q_{\max } $ �� $n_{\max } $ �ֱ�Ϊ��ֵ�����ܶȡ���ֵ��ѹ�����ط�ֵ.
�����ŷ��ṹ��Լ��,��֤�Ż�����⻬����,ѡ�����ǵı仯��Ϊ������,ʽ (1) ��������һ�������״̬���� $\dot {\sigma } = u$,��״̬����Ϊ ${\pmb x} = \left[ {r;\theta ;\phi ;V;\gamma ;\psi ;\sigma } \right]$,�ò��Կɱ���Կ���������������.
����,�õ������ſ������� (P1) ����
ʽ (7) �ж���ѧ���̿ɱ�ʾΪ
����,��һ������״̬������ص���,�ڶ��������������ص���,����������������������. ���Կ���,ѡ�����DZ仯��Ϊ������,ʹ�ÿ�������״̬����Ȼ����,�����������Ż�����.
1.2 ������
�� 1.2 �ڿ�֪,P1��һ���߶ȵķ��������ſ�������,��ֱ�Ӳ����Ż��������. Ŀǰ������ָ��ӵĶ�Լ�����ſ�����������Ͼ���ͨ�����Ի����������. ��˱��IJ��û���������Լ���������Ż�����. ͨ�����һϵ�е��Ż�������,���ƽ�ԭ������Ľ�.��ʽ (10) һ��̩��չ��,���ڵ��������ٶȽ���,����Ϊ $f_\varOmega \left( x\right) \approx f_\varOmega \left( {x_k } \right)$ ,�����Ի��Ķ���ѧ����Ϊ
����
ʽ (3) $\sim$ ʽ (5) �еĻ���Լ��Ҳ��ͨ����������������,�����Ż��ĵ���Ѱ�Ź������ڸ����IJο��켣�������Ի�,Ϊ��֤��������ԭ����ƽ�,������������Լ�� $\left\| {x - x_k } \right\| \leqslant \varDelta $.
Ϊ�����������"α������"������,���ͶԳ�ֵ�������̶�,ͬʱ�ֲ����Ի����������,��ʽ (11) ������һ����������� $w$,�ɵ�
���ڵ���������,��Ŀ�꺯���п�������������ķ�Χ,ʹ���ڵ�������ΪС��,�Ӷ���֤�����ȷ��, ��
2 �㷨����
2.1 ������ɢ
Ϊ�������ά���ſ����������ֵ��,������������ɢ.Ϊ�˼����,״̬������ͨ��һ����ɢ�ɵȾ����ֵ��,������ֵ�㴦�Ŀ�������ͨ�� B �������߿��Ƶ�ı���ʽ��ʾ,���Ƶ������ѡȡ����ʵ�ʷ����е���,�Ż������еĻ�������������λ��ֱ�ʾ.��������ʾ���ַ�������ʮ����Ч��������ֵ����п������ľ�ݻ�����,���������ڵ�������,���Ҽ�������Ҫ���ı�������.��ʱ��$N$�ȷ�,�ɵ���ɢ��Ķ���ѧ����Ϊ����,�ϽDZ� $k$ ��ʾ�� $k$ �ε���,�½DZ� $i$ ��ʾ $t_i $ ʱ��,${\pmb x}_i^k = {\pmb x}^k\left( {t_i } \right)$,${\pmb A}_i^k = {\pmb A}\left( {{\pmb x}_i^k } \right)$,${\pmb f}_i^k = {\pmb f}\left( {{\pmb x}_i^k } \right)$,${\pmb f}_{\Omega ,i}^k = {\pmb f}_\Omega \left( {{\pmb x}_i^k } \right)$. ��ʽ (13) ����������ϵ�
2.2 ��������
�������ڸ���״̬���������������,���м�ǿ�ķ�����,�Ҹ���Լ����Ҳ��Ϊ��,������ֱ�������ڵ㷨�������. �����ж��ι滮�㷨�ĵ�����,������****����˻���������Լ���������Ż�����. ��������Լ��Ҳ����Ϊ�˱��������Ի��Ŀɿ��̶�,��Ȼÿ����������ʹ�õIJο��켣�IJ�ͬʹ��ÿ�ε������̲�����ͬһ������,Ҳ����˵�������ϸ�����Ž�. ��ȡ�̶�������,��ÿ�ε����������ȫ��������Ѱ�Ž��,�ڵ������ڿ��ܻ������ͼ1 ��ͼ2 �����,����״̬�����ڵ������ڲ���������,���Է���ͣ����,����Ѱ��ʧ��.ͼ1
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ1������
Fig. 1Vibration phenomena
ͼ2
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ2�����Ż��Ż����
Fig. 2Results of sequential convex optimization
������־��������ֲ���Сֵ,������ţ�ٷ�������,�������һ��"��������"�������취.ͨ���������Ჽ�� �ͻع����������ٴ������־ֲ���Сֵ����. ����������£�
(1) ��ֵѡȡ,�����Ի�,ȡ�������ݲ��� $\alpha \in \left( {\left. {0,1} \right]} \right.,\beta \in \left({\left. {0,1} \right]} \right.$ �Լ������� $\varDelta _0 $
(2) ����� SOCP ����,�õ� $\varDelta _x $.
(3) �ж�ͣ����.
(4) �жϻ���������$If \ \ J\left( {k + 1} \right) > J\left( k \right)$,$x\left( {k + 1} \right) =x\left( k\right) + \alpha \varDelta _x $,$\varDelta _0 = \beta \varDelta _0 $,���벽��һ.
�û��������Ĺؼ������������������Ȩֵ�Լ����Ჽ��Ȩֵ��ѡȡ,���Գ��ڿ�����Ϊ�ƽ�ָ���,�����ھ���ķ���������ʵ�����. һ����������������ٶȲ��˹���,������ܼ��������ֲ����ŵ�;����һ�������Ჽ���������ι켣�����켣֮���Ȩ��,��ֵ��ѡ������˵��������ٶȵĿ���,����ϵ��ʵ���ϴ����˵��������ķ���,�ɾ��������ٶȵĿ�������������������.
3 �������������Ŷ�������켣�Ż�����
3.1 ����������ʽ����
�������ʽ���۵Ļ���˼��������һϵ���ض��ֲ��������������������ʽ������������Ŷ����бƽ�[27-29]. ����ʽ���緽���ܹ����ڶ������ģ�͵�������,�缯�ɵ�·����Ӧ����[30]����ͬ�������������о�[31-32]�Լ�����������о���.������÷��� $\omega $ ��ʾ����¼�,$\varOmega $ Ϊ����¼��ļ���. �����������ʸ��Ϊ
����ÿ��Ԫ�� $\delta _i \left( \omega\right)$ ��Ϊ�������. ͬʱ�ڿռ䶨�����ڻ�Ϊ
���� Cameron-Martin ����,��Щ������� $\delta _i \left( \omega \right)$ �Ķ���ʽ������ $L_{2}\left( \varOmega \right)$ �ռ����dz��ܵ�,Ҳ����˵�κ�������̶������� $L_{2} \left( \varOmega\right)$ �ռ��������������������ʽ�ƽ�. ������������,����������� $X\left( \omega\right)$ �������ɻ������ʽ����Ϊ
���ò����� $p$ �Ķ���ʽ����������ض�,��д�ɽ�����ʽΪ
����,$P_j \left( {\varDelta \left( \omega \right)} \right)$ Ϊ��������ĵ� $j$ ������ʽ,$x_j$ Ϊ�������ʽϵ��. �����ķ����н�������� $\varDelta \left( \omega \right)$ ��дΪ $\varDelta$,�������ʽ $\varPsi \left( {\varDelta \left( \omega \right)} \right)$ ��дΪ $\varPsi $. $N_{PC}$ �Ƕ���ʽչ��ʽ������,������ʽȷ��
���ڷֲ��������߸����ܶ���֪���������,ʽ�е�ϵ��Ϊȷ��ֵ. ����ʽ��ѡ����������������ĸ����ܶȺ���,���� Askey ����,���ڲ�ͬ�����ܶȺ���,���ڲ�ͬ�����Ŷ���ʽ,�����Ӧ��ʽ����1 ��ʾ[28].
Table 1
��1
��1��������ʽ������ֲ����Ͷ�Ӧ��
Table 1
 |
�´��ڴ�|����CSV
������������ʽ����,ʽ (20) �еĶ���ʽչ��ϵ�����Ա�ʾΪ
��ʽ�Ҳ�ļ���,����ʹ����㷨���,��������������ת��Ϊ��ɢ��λ�ú���ֵ�ļ�Ȩ��. ����Ȩ����Ҫ������ر����ķֲ����ͽ���ѡ��. ���ھ��ȷֲ����������,��Ҫѡ�� Legendre-Gauss ��� Gauss Ȩ��. ����Ӧ�Ļ��ּ���Ϊ
����,$Q$ Ϊ�����ܸ���,��Ӧ������Ȩ���� $\tau _m $ ��ʾ.
Ӧ�û������ʽ�ɷ���õ����Ź켣��Ӧ�����������ͳ����Ϣ,��Щ��Ϣ��ͨ���������ʽ��ϵ���õ�,���ֵ�ɱ�ʾΪ
����Ϊ
3.2 ���ڹ���������ʽ��³���켣�Ż�
�ڷ�����������н�,�������������Ŷ��Ȳ�ȷ���Ե�����,����Ȼ���û���ȷ����ϵͳ���Ż����õ������ǿ�����,��������ѹ��·��Լ��������Υ�������,�Ӷ����ܵ��·��������ʧ��. ��˿�������ε����������Ŷ���ȷ�����Ŷ�,������������³���켣�Ż�����,ͨ���÷����ɽ������Ź켣���Ŷ������г̶�,ȷ���Ż�����������й涨Լ��.���ǵ����������ſ�������ĸ�����,������Ҫ���Dz���״̬�ľ�ֵ�ͱ������������ֲ�����. ����ͳ�켣�Ż�����ת��Ϊ³���켣�Ż�����, ����
ʽ��,$ \mathop{ (\cdot) }\limits^{\_} $ �� $\left( \cdot \right)^\sigma$ �ֱ���������ľ�ֵ�����,$a$ Ϊ��ȷ����ģ�Ͳ���,ϵ�� $k$ ����Լ����������Զ���ѧģ�Ͳ�ȷ�����ص�³����,$k$ ֵԽ������켣�Ż���³����Խǿ,����������ʧԽ��,���Է������³���켣�Ż�����Ĺؼ����������״̬�����ı仯.
Ϊ�����Ч��,���IJ��ûع鷨[30]���ʽ (20) �еĹ���������ʽչ��ϵ��,����ͨ����㷨��������� $\delta$ ���в���,�� $\delta = \{ \delta ^{( 1)},\delta ^{( 2)}, \cdots$, $ \delta ^{\left( {N_S } \right)} \}$. ���Ż������е� 7 ��״̬���� $x = [ r;\theta ;\varphi ;V;\gamma ;$ $\psi ;\sigma ]$ ͨ���������ʽչ��,������ɢ�����ʽ (20) �ɵ�
��ʽ (28) ���붯��ѧ���̿ɱ�ʾΪ���¾�����ʽΪ
�ɽ�ʽ (29) ��дΪ ${\pmb A}\dot {\hat {\pmb x}}_i = {\pmb F}_i$,���ڲ��������Ŀ���ڶ���ʽ����չ��ϵ���ĸ���,��ͨ����С���˷����
������Լ������ ${\pmb g}\left( {{\pmb x}, {\pmb u},t, {\pmb a} }\right)$ ��Ŀ�꺯�� ${\pmb O}\left( {{\pmb x}, {\pmb u},t, {\pmb a}} \right)$ Ҳ�ɲ������Ƶķ�����ʾΪ�������ʽ��չ����ʽ,�Ӷ��õ���Ӧ��չ��ʽϵ��
����ϵ������������ɺ�,�ɵõ�����״̬������������Լ�������Լ�Ŀ�꺯���ľ�ֵ�������ͳ������.
4 �������
����������һ���ظ�ʹ�÷�����������켣�Ż�Ϊ��,�Ե� 3 �ں͵� 4 �������ȷ���Թ켣�Ż������Ϳ������������Ŷ�����������Թ켣�Ż��������з��������֤. ������ $m = 104 305$ kg,�����ο���� $S=391.22$ m$^2$,����ģ�������������ɻ��ij�����Ʒ���,���õ��͵Ķ��ηֶα�ƹ�������,����������ʽΪ
�������ݲ����Ƿ���ʱ��Թ켣��Ӱ��,�涨������ʱ�� $t_{f} = 1600$ s,��ɢ������Ϊ 200,Ϊ��֤�����Ч��,�趨��ߵ�������Ϊ 100 ��. ���������������2. ������,�����Ż��㷨��������Լ����������������
Table 2
��2
��2��������
Table 2
 |
�´��ڴ�|����CSV
���ĵķ�����ǻ��� matlab ����,���� Mosek8.0[34] �����������������,�Գ�ʼ״̬��ĩ��״̬��ֱ��Ϊ��ʼ�ο��켣,��Լ���� 5$\sim$7 �ξͻ� ������,˵���÷������к�ǿ��³����.
4.1 ȷ��������켣�Ż��������
������������û���Ŷ�,��������������������켣�Ż�,�����Ż����ж���ʽʱ�临�Ӷ�,�Ҿֲ����Ž⼴ȫ�����Ž���ص�,��˸�Ѱ��ʱ��Ƚ϶�,��ԼΪ 7 s.����Ƕ��ʽ C ���Ի�����,����ʱ���ż�������,�������߹켣����� DZ��.ͼ2(a) ���Ż�����е��ٶ�-�߶����ߺ���������ѹ�����ص�·��Լ����ʾ��ͼ,���ṩ��������յ����ߵĹ켣��Ϊ��ʼ�ο�ֵ�������,�����Ż�����Ҳ�ܺõ����������������Լ�������Ź켣,�����÷����Գ�ֵ�������Ƚϵ�,³���Խ�ǿ. ͼ3 �ǶԿ������ֱ���о�����ɢ�� B ����������ɢ��Ѱ�Ž��,���Է���,���IJ�ȡ�ķ�����Ч��������ֵ�����о� �ݻ�����,ʹ��Ѱ�Ž����Ϊ�⻬����.
ͼ3
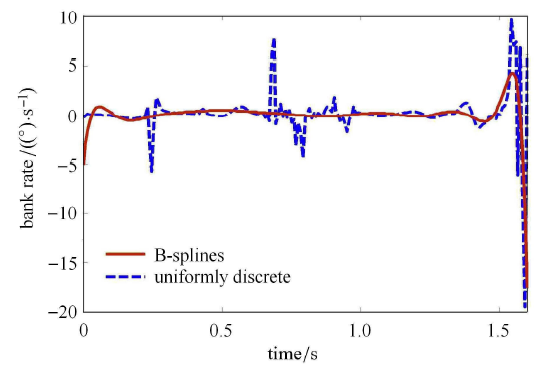 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ3ʱ��-����������
Fig. 3Time-control curve
Ϊ��֤�����Ż�����Ч�ԺͿ�����,ͬʱΪ����״̬���ĵ�ͳ������,�ȽϹ���������ʽ�����ؿ��巽�����ص�,�ֶ�����������ƫ,���� 400 �δ�в���,��ƫ��Χ $K_{a}= \left[ {0.7,1.3} \right]$,$C_{L} =K_{a} C_{L}^0 $,$C_{D} = K_{a} C_{D}^0 $,���Խ����ͼ4 ��ʾ.
ͼ4
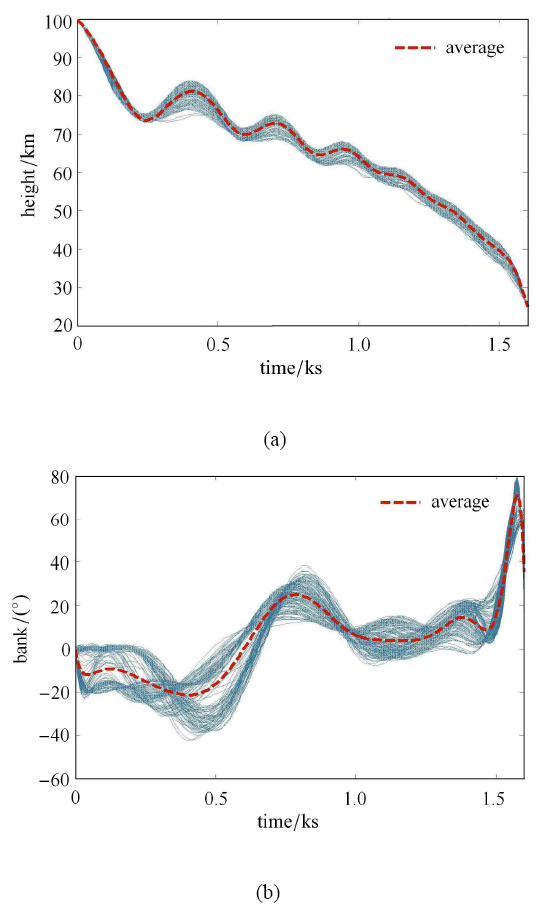 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ4��в��Խ��
Fig. 4Results of target test
���Կ���,�����Ż�������Ӧ������ƫ���,ƽ����ʱ 7.14 s ����,�㷨������³���Խ�ǿ. ȡ 8 �� Gauss ��������,ͨ����С���λع�������������ʽ��ϵ��. ���ù������ʽ���� GPC �����ؿ������ MCS �ֱ����������ȷֲ�������������ϵ���Ŷ������µ��Ż��켣��״̬���� ��ͳ������.��ͼ�Աȷ����˲�ȷ��������״̬�����ľ�ֵ�仯���������仯����.���Կ���,���ַ�������ĸ�״̬�����ľ�ֵ�仯������һ��.
��ͼ5(b) ��ͼ5(d) ��֪,���������Ŷ�������,��״̬�����ı�����������ҵı仯. ���и߶��Ŷ���ֵ���� 2000 m,�����ڷ��й�����Ҳ�����˳��� 10$^\circ$ ���Ŷ�,˵�������������Ŷ��Է���״̬�����˽ϴ��Ӱ��.
ͼ5
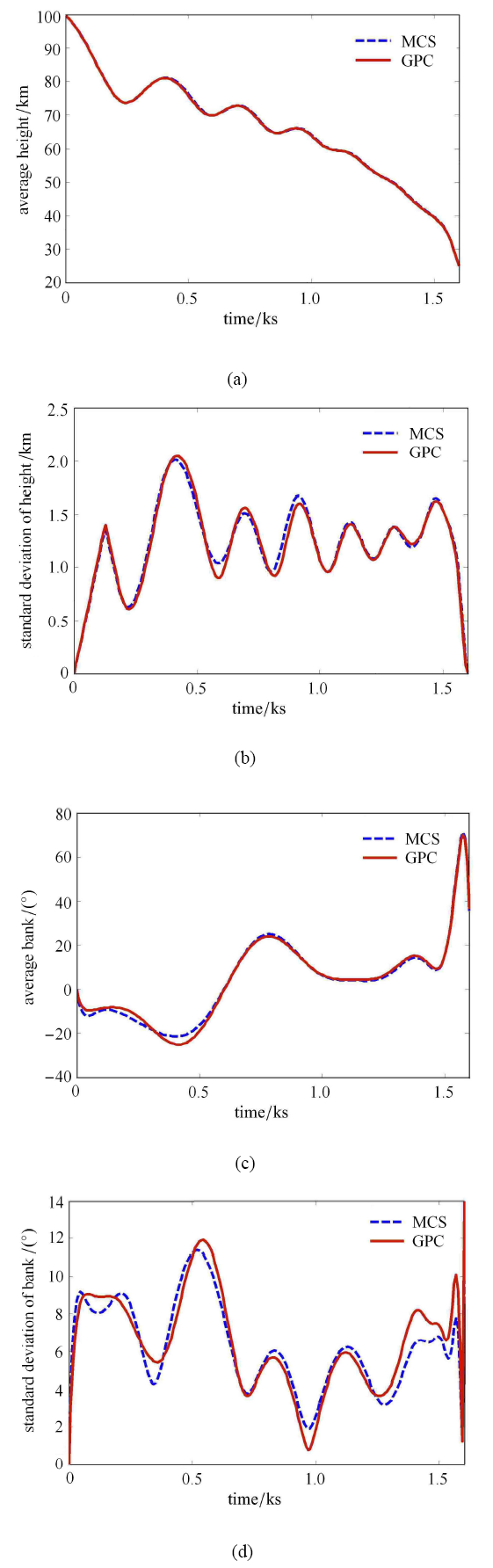 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ5�������ʽ������
Fig. 5Results of chaotic polynomial calculation
�ۺϷ������ַ����������õ�ͳ������,���ѷ��ֹ������ʽ���緽���봫ͳ���ؿ�����淽���ļ���������һ��. �������ù������ʽ���緽��������㷨����ͳ�����ԵĹ�����,����һά����������õ�������Ϊ 8,�����ؿ�����淽���ﵽ�������ȵIJ��������ϴ�,˵���������ʽ���緽�����ڼ������������Ŷ�������״̬������ͳ�����Ծ��кܴ�ļ�������.
4.2 �������������Ŷ�������켣�Ż��������
��һС�ڵķ�������֤�������Ż��Ŀ����Ժ���Ч��,�����������������������������Ŷ�,����Ȼ���û���ȷ����ģ�͵Ĺ켣�Ż��������õ������ǿ�����,·��Լ������������ѹ�Ƚ�����Υ�������. ��˱�����Ҫ�о��ڷ�������������п������������Ŷ��Ĺ켣�Ż�����,�����������Ź켣�Բ�ȷ���Ŷ������г̶�,���Ѱ�Ž����³����,�Ӷ���֤���������Բ���ɹ�.��ʽ (20) ֪,�������ʽ�ĸ��Ӷ�����չ������������������,Ϊ��֤����Ч��,���ڵ��Ż�������ֻ���� 10% �����������Ŷ�,���һ���ȡһ�� Legendre ����ʽ,��ȡ 3 �� Gauss �������ֵ����չ��ʽ��ϵ������. ���ǵ�³���Ե�Ҫ�������������������,�ֽ���������ܶȵ����� $\dot {Q}_{\max } = 16$ kW/m$^2$,ʽ (27) �в��� $k = 1$.
ͼ6������ȷ����ģ�������õ��Ŀ��������д�в������õ������붯ѹ�Ľ��. ���Է���,ȷ����ģ�͵��Ż�������������������Ŷ�������·��Լ��,��ʵ�ʷ���ʱ,���ܻ�ʹ���������,��������ʧ��.
ͼ6
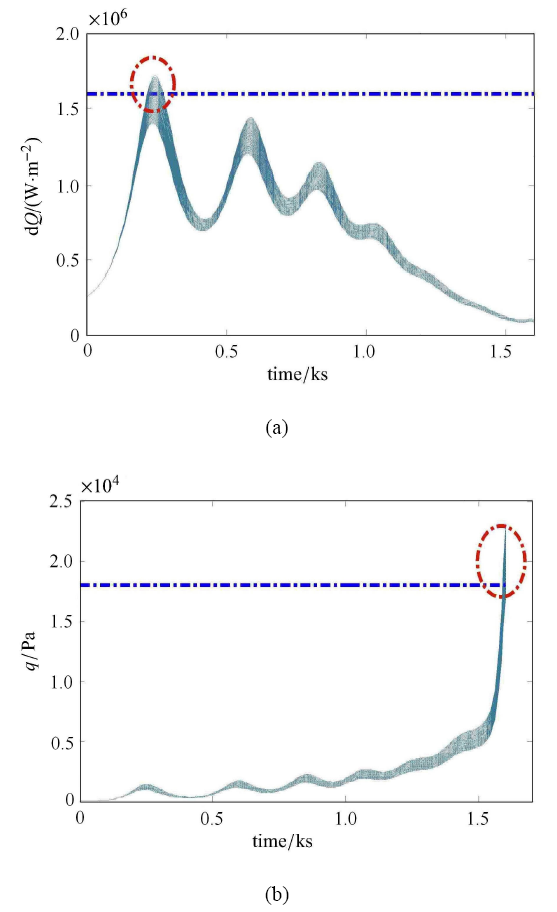 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ6ȷ�����Ż��������Ͷ�ѹԼ��
Fig. 6$\dot {Q}$ and $q$ of the deterministic optimization
Ϊ���Ѱ�Ž�����ȶ��Ժ�³����,�������� 3.2 �������³���켣�Ż��������з�����֤. �������Ż��ļ�����,��ֿ������������ĸ���,���û������ʽ����õ�������Լ��������ͳ������,��Ѱ�Ź����н����������,�����Ż����õĿ�������������������ƫ��в���,�̶��õ���ͼ7 �Ĵ�н��.
ͼ7
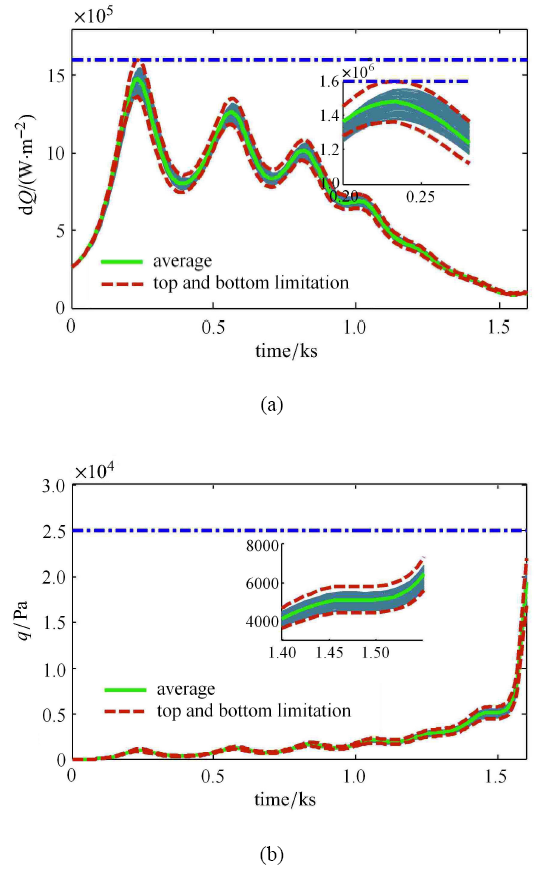 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ7ȷ�����Ż��������Ͷ�ѹԼ��
Fig. 7$\dot {Q}$ and $q$ of the robust optimization
��ͼ7 ��֪,����в����Ż����õĿ����������������мȶ�������·��Լ��,ͨ������������ʽ�����Ƶķ�����Լ��������ͳ�����Ի���������ʵ,���������е�Լ�����ڹ��Ʒ�Χ��,��Ҳ˵���˻������ʽ��������ȷ���ȴ������������. ͼ7 �������Ƶ�����ƫ����Ȼ�������й�����Լ��,��һ���̶��ϱ�֤�����������Լ����ԣ��,��������������ʵֵ����ƫ��. �������ڼ�������������,���������ֻ������һ����ʽ�Ҳ�������� 3 �� Gauss ��,���㾫�Ƚ�Ϊ����. ͬʱ��Ҫ˵������,����ֻ������ 10% �����������Ŷ�,����Ϊ���Ŷ����Ӿ��ȷֲ�,��Ȼ����֤���������³���켣�Ż������Ŀ�����,������һ����������ų̶�,���ܻᵼ�����н�����. ���Ȿ�η�����,ȡ $k$ ֵΪ 1,$k$ֵԽ��,���ǵĸ���ԣ��Խ�켣�Ż���³����Խǿ,����������ʧԽ��,��ʵ��Ӧ�ù�����,��Ҫ�������Ժ�³����֮������Ȩ��.
3 ����
�����Կ������������Ŷ�������³���켣�Ż����Ϊ��Ҫ�о�����,ͨ������������ʽ���������������ͳ�����Խ�����Ч����,ͬʱ���һ�ָĽ��������Ż���������³���켣�Ż���Ʋ���. �켣�Ż������������ǵı仯����Ϊ������,Ϊ������ֵ�Ż������еľ�ݻ�����,���� B ����������ɢ������,ͬʱ���Ӷ������������,ͨ��һ��"����ֱ��"�����ķ���,����㷨���ȶ��ԡ������Ժ�Ѱ�Ž���Ĺ⻬��. �ڿ������������Ŷ�������Ѱ�Ź�����,������������ѹ�ȶ���Լ����ͬʱ,�������������Ŷ����Ż������Ӱ��,����˻��ڹ���������ʽ�������Ż��������ϵ�³���켣�Ż�����. ����������,�ò��Կ�����Ч�����Ż���������������Ŷ������г̶�,������Ӧ�ȶ������й���,���ֳ���ǿ��³���ȶ���,����һ���Ĺ���Ӧ�ü�ֵ.�ο����� ԭ��˳��
������ȵ���
������������
�����ڿ�Ӱ������
//
[��������: 1]
[��������: 1]
//
[��������: 1]
//
//
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
DOIURL [��������: 2]
DOIURL [��������: 1]

Planetary soft landing is one of the benchmark problems of optimal control theory and is gaining renewed interest due to the increased focus on the exploration of planets in the solar system, such as Mars. The soft landing problem with all relevant constraints can be posed as a finite-horizon optimal control problem with state and control constraints. The real-time generation of fuel-optimal paths to a prescribed location on a planet's surface is a challenging problem due to the constraints on the fuel, the control inputs, and the states. The main difficulty in solving this constrained problem is the existence of nonconvex constraints on the control input, which are due to a nonzero lower bound on the control input magnitude and a nonconvex constraint on its direction. This paper introduces a convexification of the control constraints that is proven to be lossless; i.e., an optimal solution of the soft landing problem can be obtained via solution of the proposed convex relaxation of the problem. The lossless convexification enables the use of interior point methods of convex optimization to obtain optimal solutions of the original nonconvex optimal control problem.
DOIURL [��������: 1]
This paper analyzes a class of finite horizon optimal control problems with mixed non-convex and convex control constraints and linear state constraints. A convex relaxation of the problem is proposed, and it is proved that a solution of the relaxed problem is also a solution of the original problem. This process is called lossless convexification, and its generalization for problems with state constraints is the primary contribution of the paper. Doing so enables the use of interior point methods of convex optimization to obtain global optimal solutions of the original non-convex problem. The approach is also demonstrated on example problems. (C) 2014 Elsevier Ltd.
//
[��������: 1]
//
[��������: 1]
DOIURL [��������: 3]
//
[��������: 1]
DOIURL [��������: 1]
�������ȷ��������½���⣬���ǵ������ϰ�����������ӳ�Լ�����ƶ�������������СԼ�������������½��ι���Ż������������о������Ƚ����˺�Լ����������ά��������½����Ż�����ģ�ͣ������ӵ��ǽ�Сֵԭ���Ƶ��������������ط��̣��������������������䲻���ڵ�֤��������Ż�ģ���еĸ��ӷ�����Լ���������Ż����۽�����ת��Ϊ�����Ż����⣬�������ڵ㷨��������ű�ƹ켣������������������½�ƶ��Ρ��ӽ��εķ���������֤�˸���½����Ż���������Ч�ԡ�
DOIURL [��������: 1]
Taking account of the navigation and hazard detecting sensor FOV (Filed of View) constraint and the thrust constraint, the trajectory optimization algorithm for lunar pin point landing is studied in this paper. Firstly, a three dimensional trajectory optimization model is established, the optimal thrust switch function is given out according to the Pontryagin maximum principle. Also, the singular interval of thrust is proved to be nonexistent. Then the nonlinear constrained optimal control problem is transformed into a second order cone parameter optimization problem through convex transformation and discretization. In the meanwhile, the parameter optimization problem is solved by using interior point method. The feasibility and validity of the algorithm are verified by simulation results of different scenarios.
DOIURL
Aiming at the trajectory optimization and guidance (TOG) of a hypersonic gliding vehicle considering under the condition of multi constrains, the methods of TOG are divided into off line TOG and on line TOG, and the prospect is brought forward. The mathematical models with stochastic disturbances of the TOG for the hypersonic gliding vehicle are first built. The off line TOG is summarized from two sides of determinacy and robustness, according to whether considering stochastic disturbances or not. The on line TOG is classified as reference guidance and predictive guidance, and the principle of the reference guidance is reference trajectory on line generation and reference trajectory tracking. Finally, it is pointed out that the future research of the TOG should be enhanced at the model, calculational efficiency, multitask, and high accuracy guidance and so on.
[��������: 1]
[��������: 1]
[��������: 1]
//
[��������: 1]
DOIURL [��������: 1]
//
[��������: 2]
//
DOIURL [��������: 1]
DOIURL [��������: 1]
//
[��������: 1]
[��������: 1]
//
[��������: 2]
[��������: 1]
DOIURL [��������: 1]
//
[��������: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}