 ,2), �ߵ�Ρ������ҵ��ѧ�����о�Ժ,�㶫���� 518057
,2), �ߵ�Ρ������ҵ��ѧ�����о�Ժ,�㶫���� 518057������ҵ��ѧ����ѧԺ,���� 710072
COORDINATED PATH PLANNING BY INTEGRATING IMPROVED RRT$^{\small*}$ AND QUARTIC SPLINE$^{\bf 1)}$
Yu Min, Luo Jianjun, Wang Mingming,2), Gao DengweiResearch & Development Institute of Northwestern Polytechnical University in Shenzhen, Shenzhen 518057,Guangdong,ChinaSchool of Astronautica,Northwestern Polytechnical University,Xi'an 710072,China
ͨѶ����: 2)������,������,��Ҫ�о����ռ�������˶��滮�����. E-mail:mwang@nwpu.edu.cn
�ո�����:2020-03-5��������:2020-04-29�����������:2020-07-18
| ��������: |
Received:2020-03-5Accepted:2020-04-29Online:2020-07-18
����� About authors

ժҪ
��Կռ������ץ���ռ�Ǻ���Ŀ����ڹ��������,ͬʱ���ǻ������˶�ѧԼ���Ͷ���ѧԼ��,���һ�ֲַ�ʽ������Ư��˫�ۿռ������Э��·���滮����. ����,��·���滮�����ϻ��� RRT* �㷨�ֱ�滮˫��ĩ��ִ�����ڵѿ����ռ��µij�ʼ����·��,Ϊ˫�����ö����IJ����ռ�,��֤·���滮������˫��ϵͳ������������ײ. Ȼ��,�ڹ켣�滮�����������Ĵ���������ƽ�� RRT* �㷨���ɵij�ʼ·��,��������������ߵ�һ�ס���������������Լ��,ͬʱ���ǻ�е��ĩ��ִ�����ij�ĩ�ٶ�Լ����������ʼ���ٶ�Լ������,�õ��ʺ��ڿռ������ִ�еĶ���ѧ���е�ƽ�� �켣.���,�������滮·��������ٶȡ������ٶ����е��ĩ��ִ������������ֵ�ı�ֵ,ȡ��С����,��Ϊ����·���滮ʱ��. ����·���滮�����ܹ���Ƴ������ض�·����Լ����Э��·��,������Ƶ�·�������˻�е�۵�������������,ͨ��������Ư��˫�ۿռ�����˽��з�������,��֤������·���滮�㷨����Ч��.
�ؼ��ʣ�
Abstract
In order to perform an OOS (on-orbit servicing) mission of capturing a space non-cooperative target by space robot, this paper proposes a hierarchical coordinated path planning method for the free-floating dual-arm space robot, in which we consider the robot's constraints both kinematic and dynamic at the same time. First of all, a feasible end-effectors' path is initially planned via a state-of-the-art sampling-based method, named RRT* algorithm, in the Cartesian space, in which the sampling space is separated for two arms for the sake of possible self-collision avoidances of the dual-arm system during the high level of the path planning stage. Secondly, quartic splines are employed to smooth the path planned by RRT* algorithm during the low level of the trajectory planning stage. By designing the first-order derivative, the second-order derivative as well as the third-order derivative of these quartic splines, continuous differential constraints of the robot's path are well guaranteed. More importantly, we should integrate the robot's dynamic constraints within the design of differential constraints, such as the initial velocity, the initial acceleration and the final velocity of the end-effectors. After that, a smooth trajectory considering certain boundary constraints is obtained, which is dynamically feasible for the robot execution. Finally, the time of the whole path execution is calculated by considering the maximum physical limitation of the end-effectors. The minimum upper limit of maximum velocity and maximum acceleration of planned path of the end-effectors over its physical limitation is the minimum execution time. The proposed path planning method could design a coordinated path satisfying certain waypoints constraints for the robot. Besides, the physical limitation of the robot is also considered for the planned path. Moreover, the proposed path planning method is successfully validated on a free-floating dual-arm space robot and simulation results demonstrate the effectiveness of the proposed path planning method.
Keywords��
PDF (12550KB)Ԫ������ά�����������������EndNote|Ris|Bibtex�ղر���
�������ø�ʽ
����, ����, ������, �ߵ�Ρ. һ�ָĽ� RRT$^*$ ����Ĵ�������Э��·���滮����$^{\bf 1)}$. ��ѧѧ��[J], 2020, 52(4): 1024-1034 DOI:10.6052/0459-1879-20-074
Yu Min, Luo Jianjun, Wang Mingming, Gao Dengwei.
����
�����ڹ�ά�ޡ��ռ�װ���������������վ���,�ռ�����˼�������֤��ִ��������ӿռ价������������Ч���ֶ�֮һ. ����ʵ���� "������������ (engineering test satellite VII, ETS-VII)"[1] �� "����쳵 (orbit express, OE)"[2]. �ռ�������ڹ���������������ս�ԵĹ���֮һ����ץ�������е��˶��滮����[3-7].��ȥ������������������ֿռ�������˶��滮����. ���������ÿռ�,Yoshida ��[8]����������û�е��,������˶�ѧ������ۺ�����ۿ���ʱ�����ٺͻ�е���ٶ����ƵĹ滮����. �����㷴���ÿռ�ĸ���,Wang ��[9-13]�����һ�ֿ����������ȼ����˶�ѧ�����е��·���滮����,������ B��zier �������ץ���������Ǻ������������·���滮����. ������[14]�����һ�����ø���Ҷ�����Կռ��е�۹ؽ��˶��켣���в������Ĺ滮����. Xu ��[15]��������Ư���ռ�����˷��������������һ�ֵ㵽���·���滮����,ͬʱ���ڻ�����̬��ĩ�˵�λ��. Nakamura ��[16]�����ڻ�����ѧ���������������ȼ��ĸ���,���ڶ��ι滮���,�������������ȼ�ˮƽ,����������е�۹ؽڹ켣�� ������. ��������[17]���� Legendre α���о�����Ư���ռ�����˷�����·���滮���� �ſ�������. �̾���[18]������˫�ۿռ�����˲������ǵ���ѧ,���о����� ������. Salehian ��[19]�о���˫�ۻ����˵�Э����������������ײ��ܲ���. ���[20]�о�������˫�ۻ����˵�ʵʱЭ����������. ����[21]�о�˫�ۻ����˵������˶��滮��Э����������.
������,�ǽṹ�������µĻ����������������Ƽ�����Ϊؽ��. ������������Ĺ滮�����ڻ���������������,���ʺ��ڽ�������ɶȻ������ڸ��ӻ����еĹ滮����,���ҶԴ�����Լ���Ĺ滮����Ҳ���н�ǿ�Ľ� ������. ����,RRT �㷨[22],�䱾�����ǵ�һ��ѯ�Ĺ滮����,������㷨����Ҫ˼���ǣ�����ʼλ�ε��������������,�����ٴ�����λ�οռ������ѡ��һ��λ�ε�,�ҳ���õ����������������λ�ε�,�Դ˲��ϵIJ�����λ��״̬,ֱ������Ŀ��,�������������. ��������������������п��Կ��Ƕ�����Լ�� (�������Լ�����˶�ѧ������ѧԼ����),�����õĹ滮��������Խ�ǿ. Vahrenkamp ��[23]���� RRT �㷨,���һ�������ڵ���˫�ۻ����˵�ץ�����˶��滮����. James ��[24]�� RRT ����Ӧ����˫�ۿռ������ץ��ǰ�ε�·���滮������. Ȼ��,���� RRT �㷨���˶��滮���������ij�ʼ�켣��ƽ��,����ֱ��Ӧ���ڻ������˶��滮������. ������ƽ�������������Ż�����������������ϼ���[25]��,Ȼ�������Ż�������Ϊ��ʱ. Kolter ��[26]���������������������������˵�������ռ��µ��˶��켣. Vaz ��[27]������������Ͱ����滮�������л����˵Ĺ켣�滮. �������ηǾ��� B ��������,����[28]�������ֵ�[29]�ֱ���� 6DOF ��е�ۺ�ҵ�����˵Ĺ켣�滮. �����о�����,��������������Ч��ƽ����������֮һ,���ڻ������˶��滮�еõ��㷺�ijɹ�Ӧ��.
������Ҫ�о��ռ�˫�ۻ����˵�Э��·���滮����,���� RRT* �㷨�ֱ�滮˫�۵�ĩ��ִ�����ڵѿ����ռ��еij�ʼ����·��,�������Ĵ��������߶��� RRT* �㷨���ɵij�ʼ·������ƽ������,ͨ�������������ߵ�һ�ס���������������Լ��,��֤��е��ĩ��ִ�����ij�ĩ�ٶȡ����ٶ�Լ������,�õ��ʺ��ڻ�����ִ�е�ƽ��·��. ���������� RRT* ���Ĵ��������߷���,�о��˿ռ��ۻ����˵Ŀ���·���滮����,����˫�۹滮�����е�Э���Բ�����·��ƽ������,����Ϊ�ռ��ۻ�����Э���˶��滮�����Լ���������Э���˶��滮�����ṩ�ο�����.
1 ����Ư��˫�ۿռ�����˽�ģ
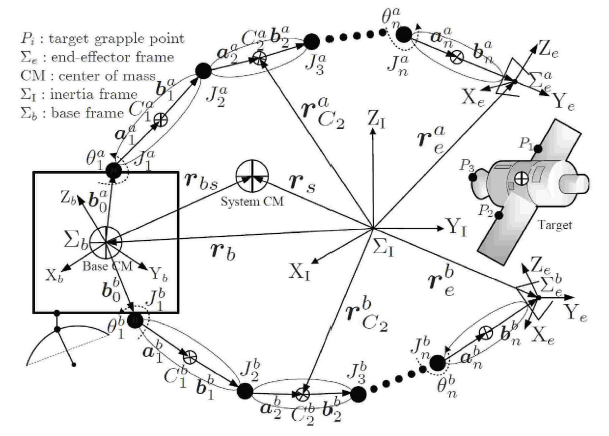
��ͼ 1 ��ʾ,˫�ۿռ������ϵͳ�� 1 �������� 2 �� $n$ ���ɶȵĻ�е�۹���,���� $2n +1$ ������,��ϵͳ�����κ��������� (�����о��� $n =7$).ͼ1
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ1����Ư��˫�ۿռ������ϵͳʾ��ͼ
Fig.1Sketch of a dual-arm free-floating space robot
�ռ�����˽�ģ����������о��ܳ���,���ݲ��ɹ�ʽ[30],�ռ�����˵��˶�ѧ���̱�ʾ����
����,�ϱ� $a$ �� $b$ �ֱ��ʾ�������ڻ�е�� $a$ �� $b$. �±� ${\rm b}$ �� ${\rm e}$ �ֱ��ʾ�������ڻ��� (base) ��ĩ��ִ�� �� (end-effector). $\dot {\pmb x}_{\rm b} \in {\bf R}^{6\times 1},\dot {\pmb x}_{\rm e}^a \in {\bf R}^{6\times 1},\dot {\pmb x}_{\rm e}^b \in {\bf R}^{6\times 1}$ �ֱ�Ϊ������ĩ��ִ���������ٶȡ����ٶȺ�ʸ��,$\dot {\pmb \theta }^a \in {\bf R}^{7\times 1},\dot {\pmb \theta }^b \in {\bf R}^{7\times 1}$ Ϊ����е�۹ؽڽ��ٶ�. �����ر�˵��,����ʸ�� (����̬���ʸ��) ѡ�����������ϵͶӰ,����ʸ�������� 1 ���о�.
Table 1
��1
��1���������˶�ѧ�Ͷ���ѧ����
Table 1
 |
�´��ڴ�|����CSV
���ݵڶ����������շ���[31],�ռ�����˵Ķ���ѧ���̱�ʾ����
ʽ��,$\ddot {\pmb x}=\left[\!\!\begin{array}{c} {\ddot {\pmb r}_{\rm b} } \\ {\dot {\pmb \omega }_{\rm b} } \end{array}\!\! \right]$ Ϊ���������ٶȡ��Ǽ��ٶȺ�ʸ��,$\ddot{\pmb\theta}^a $ �� $\ddot{\pmb\theta}^b $ �ֱ��Ǹ���е�۵ĹؽڽǼ��ٶ�ʸ��. ������Ư��ģʽ��,������ĩ��ִ��������������������,���� ${\pmb f}_{\rm b}={\pmb f}^a_{\rm e}={\pmb f}^b_{\rm e}={\bf 0}$,��е�۵��˶����ܹؽ�����Ӱ��. ϵͳ���㶯���غ�,�����˶�ѧ���̿�дΪ
ʽ��,${\pmb M}_0=[{\pmb P}_0 \ {\pmb L}_0]^{\rm T}$ Ϊϵͳ�ij�ʼ�߶������Ƕ���. ���ھ��� ${\pmb H}_{\rm b}$ ����,���Խ��������˶����̸�д����
��ʽ (2) ����ʽ (1),��ôĩ��ִ�������˶���������
ʽ��,${\pmb J}_{\rm g}$ Ϊϵͳ�Ĺ����ſ˱Ⱦ���,${\pmb J}_{\rm d}$ Ϊϵͳ��ʼ���� ${\pmb M}_0$ �������Ͼ���.
2 Э�� RRT* ����Ĵ�������·���滮
2.1 RRT* Э��·���滮
�����������ԭ���Ŀ�������������������и����걸�ԡ�������С�������Ѷȵ͵��ص�,�dz��ʺϿռ�������������ɸ��ӿռ�Ľ����������������. ����,���Խ����ά״̬�滮�������Ž�ǿ����Ӧ��,��һ������Ŀǰ�ܶ�滮�㷨�����߱���,������dz��ʺϿռ�����˸�ά�˶�״̬�滮��ʵ�����. ���� RRT* �㷨�����ӿ���ԭ RRT �㷨�������ٶ�,����ǿ���㷨����������,��˱���ѡȡ RRT* ��Ϊ�ռ������·���滮����Ҫ����,������� RRT* �㷨�Ļ�������,���� RRT* �㷨��ϸ����Բο�����[32].�����о���,���� RRT* �滮�㷨���ɻ�е��ĩ��ִ�����ڵѿ����ռ��µ�����·��,���幤���������£�
(1) ��ϵͳ�ij�ʼ״̬ (ĩ��ִ������λ����Ϣ) ��Ϊ���ĵ�һ������;
(2) �����ϰ�����ʱ��״̬�ռ����������һ��������;
(3) ��ԭ����ò���������㴦����̶����� (��ʼʱ��Ϊ����);
(4) �Բ�������Χ�ĵ���м�����Ż�,���и��̵ĺ���,�����½ڵ�����ɽڵ�;
(5) �����ϰ�����˶�ѧԼ��,������ײ���,�Ա�֤����·���İ�ȫ��;
(6) �������ε����Ż����,ֱ���ﵽĿ��״̬.
ͨ�����ϲ���,�����ڷǽṹ�����п���������һ������ײ�Ĵӳ�ʼ״̬������״̬���Ż��˶�·��.
Ȼ��,�� RRT* �㷨ֱ��Ӧ����˫�ۿռ�����˵�ĩ��ִ����������ռ��µ�·���滮,˫ĩ��ִ�����ڹ滮�Ĺ�������������������п��ܻᷢ����ײ. ��˱������ԭ�� RRT* �㷨���иĽ�,���һ�������ڶ��·���滮��Э�� RRT* �㷨,�Ľ��� RRT* �㷨ͬ��������������������ϵͳ��Э��·���滮����.
����ԭ�� RRT* �㷨���,������˫�۵IJ����ռ�ʱ,���Ķ�˫�۸��Բ����ռ�Ԥ����Լ 0.1m ���ȵ�ŷ�Ͼ���,ͨ���ڲ�ͬ�IJ����ռ��зֱ���и�ĩ��ִ������·������,���൱�ڶ�˫ĩ��ʩ���˾���һ���߽緶Χ�ĵѿ����ռ�Լ��. ֵ��ע�����,�˿ռ�Լ�����ǹ̶���,Ӧ����ĩ��ִ�������˶��������仯. �˿ռ�Լ�����Ա�֤�����滮ִ�й�����˫�ۿռ�����˲�����������ײ,��������ĩ��ִ������������ײ,�Լ�˫�۸����˲�����������ײ. �Ľ���Э��RRT*·���滮�㷨�������£�
(1) For $k=1$ to $K$ do;
(2) ����ڲ�ͬ������ռ��ж�˫ĩ�˷ֱ����;
(3) ��ԭ���ṹ���������������㸽���ĵ�;
(4) ������ײ���,�����µ����ڵ�;
(5) �ж��Ƿ��и��ٴ��۵ĺ���,���������ԭ����;
(6) Return Tree.
ע��,������ RRT* �㷨�õ���ĩ�˳�ʼ·��ʮ�ֲ�ƽ��,����ֱ��ʩ���ڿռ������,��Ҫ�Եõ��ij�ʼ·������ƽ������. ������ƽ���������ɷ�Ϊ����,һ���ǻ����Ż�����,����,�����ݶȷ����Ż�������. ��������ȽϺ�ʱ,��˱��IJ��õڶ������������ϼ���.
2.2 �Ĵ�����ƽ��
�������߱���Ϊ��ƽ��������·��������Ч���ֶ�֮һ,�ڻ����˹滮��Ҳ�õ��˺ܶ�Ӧ��,�����ؽڹ滮��ĩ�˹滮. ʵ��Ӧ�������������������������������,�����о�����,Ϊ������·������������������,���ĩ�˵�·���滮������Ҫ�õ��Ĵμ����ϵ���������.����,�ع��������ߵĻ���֪ʶ. ������ $n +1$ ��ʱ��λ����ص�·��������
����,$x_i $ ��ʾ������ĩ��ִ������ʱ�� $t_i $ ������λ��.
������Щ·����,�Ĵ��������߿���ƽ�����ν���Щ·����,�ұ�֤�������νӴ�����һ�ס�����������Լ����. �Ĵ��������ߵĻ�����ʽ��������
����,$a_i ,b_i ,c_i ,d_i ,e_i $ �ֱ����Ĵ��������ߵIJ���. ���յ�·�������ɶ��Ĵ���������������. ����·����,����Ψһ��������������,ʹ�ù滮��·��ͨ������·����,���ڸ���·���㴦�����ض����ٶ�����,���ٶ�������Լ������. ��Ի������˶�����,����Ҫ���ּӼ��ٶ�����,�Է���е�۲�����������.
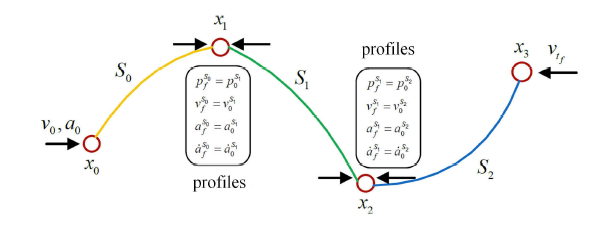
��ͼ 2 ��ʾ,����һϵ��ĩ��ִ����������·����(�����о���,��Щ·������ RRT* �㷨����),���� $i =3$,��ô���� 4 ��·����,����Ҫ���� 3 ���Ĵ���������,���� 15 ��δ֪����.
ͼ2
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ2�Ĵ���������ʾ��ͼ
Fig.2Sketch of quartic splines
ͨ����֤����·����λ��Լ�� (6 ��Լ��);�м�·���㻹�������ٶȡ����ٶȡ��Ӽ��ٶ�����Լ�� (6 ��Լ��),�Ա�֤�������ܹ�ƽ����ִ��ȫ��·��;����,���Ķ�ĩ�˵ij�ʼ�ٶȡ����ٶȺ���ֹ�ٶ�ʩ������ (3 ��Լ��). ������ 15 ��Լ������������,������� 15 ��δ֪����������. ������Լ������������������
����,$h_0, h_1, h_2$�ǽ���ʱ����صij���,ȡ����ʱ������$t_0, t_1, t_2, t_3$. ͨ�����������鼴�������������,�����õ�������ĩ�˵��˶��켣.
��������,����Ư��˫�ۿռ�����˵�·���滮���������Ϊ������ʽ
ʽ��,Ŀ�꺯�� $f({\pmb x}_{\rm e} )$ Ϊ�� RRT* �㷨������·�����λ�ú���,��֤·����λ�������������е�λ��ƥ��. �滮������,����Ҫ����ĩ��ִ�����ij�ĩ״̬Լ��,�Լ���е�۹ؽ���������Լ��.
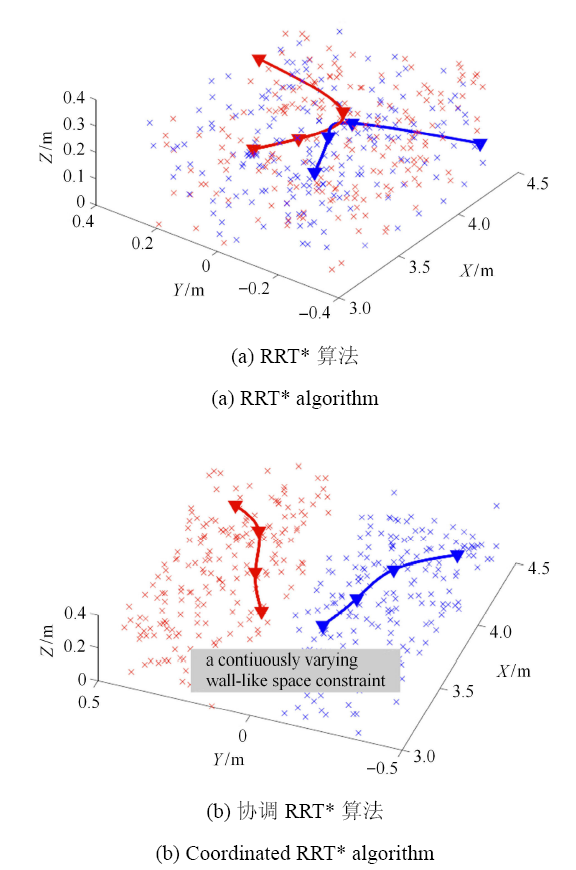
���� RRT* �㷨,�ڷǽṹ���������������ɿ���·����,�����Ĵ��������������Щ·����,���ɵõ�ƽ�����еĻ�����·��,���������·���滮�㷨,Ч����ͼ 3 ��ʾ. ����,��ɫ������ԭʼ RRT* �㷨���ɵ�·��,��ɫ�������� RRT* ��� ����������ɵ�·��,�������Կ��������㷨���ɵ�·������ƽ��,���Ҽ���ر�����ԭ RRT* ����·����������.����,ͼ 4 ��֤������·���滮�㷨��Э����,���ڷ���IJ����ռ�,��Ч�ر����˿��ܷ�������ײ.
ͼ3
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ3RRT* ����Ĵ�����·���滮ʾ��ͼ
Fig.3Sketch of spline-RRT* algorithm
ͼ4
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ4Э�� RRT* ·���滮ʾ��ͼ
Fig.4Sketch of coordinated RRT* algorithm
3 ������
Ϊ��֤����Э��·���滮��������Ч��,���¸����˲����˶�ѧ����˫��е��ץ���ռ�Ŀ����� ʾʵ��,��ͼ 5 ��ʾ.�� 2 �����˱�������˫�ۿռ�����˵��˶�ѧ�Ͷ���ѧ����,����е�۲�����ͬ.ͼ5
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ5�ռ������ץ��Ŀ��ʾ��ͼ
Fig.5Sketch of capturing task by space robot
Table 2
��2
��2�ռ�������˶�ѧ�Ͷ���ѧ����
Table 2
 |
�´��ڴ�|����CSV
��������ij�ʼλ���� 0,ĩ��ִ�����ij�ʼλ�˷ֱ�Ϊ
$\begin{array}{l} x_{\rm e}^{\rm as} = \Big (3.556, - 0.101,0.168, - \dfrac{\pi }{2},0,\dfrac{\pi }{4}\Big ) \\ x_{\rm e}^{\rm bs} = \Big (3.556,0.101,0.168,\dfrac{\pi }{2},0, - \dfrac{\pi }{4}\Big ) \\ \end{array} $
��ֹλ�˷ֱ�Ϊ
$\begin{array}{l} x_{\rm e}^{\rm af} = \Big (4.271, - 0.365, 0.168, - \dfrac{\pi }{2}, 0, \dfrac{\pi }{6} \Big) \\ x_{\rm e}^{\rm bf} = \Big (4,271,0.365,0.168,\dfrac{\pi }{2},0, - \dfrac{\pi }{6} \Big) \end{array} $
ע��,��������Ļ��� RRT* ·���滮����ֻ����ĩ��ִ������λ�ù滮,��������̬�滮,�Բ���ǰ�ڹ�����[33]���õ��� B��zier ����. ������� B��zier ����,�滮ĩ��ִ�����ڵѿ����ռ��µ���̬·�� ${\pmb x}(t)$,��������
����,����ʽ $ b_{j,m} (\tau ) $ �� $m$ �� Bernstein ��������ʽ,$\left(\!\! \begin{array}{c} m \\ j \end{array} \!\! \right) $�Ƕ���ʽϵ��. $P_{ij}$ �Ǹ������� B��zier ���ߵĿ��Ƶ�.
����ĩ�˵ij�ĩλ��,���ǻ�е�۵��ٶ��Լ����ٶ���������,���Լ�����滮·����ִ��ʱ��
ͼ 6 �������ɹ滮��ĩ��ִ������·��,�Լ�·����ִ���ٶ�. ���Կ���,�滮��ĩ��·����Ϊƽ��,���ٶȱ����ڻ�����ĩ��ִ���ٶȵ�������Ʒ�Χ (0.1m/s) ��,��·���ij�ʼ�ٶȡ����ٶȺ���ֹ�ٶȶ�Ϊ��,������ ��Ƶ����,�ɴ�˵���˹滮·������Ч��.
ͼ6
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ6�滮��ĩ��ִ������·�������ٶ�
Fig.6Planned path and velocity for end-effectors
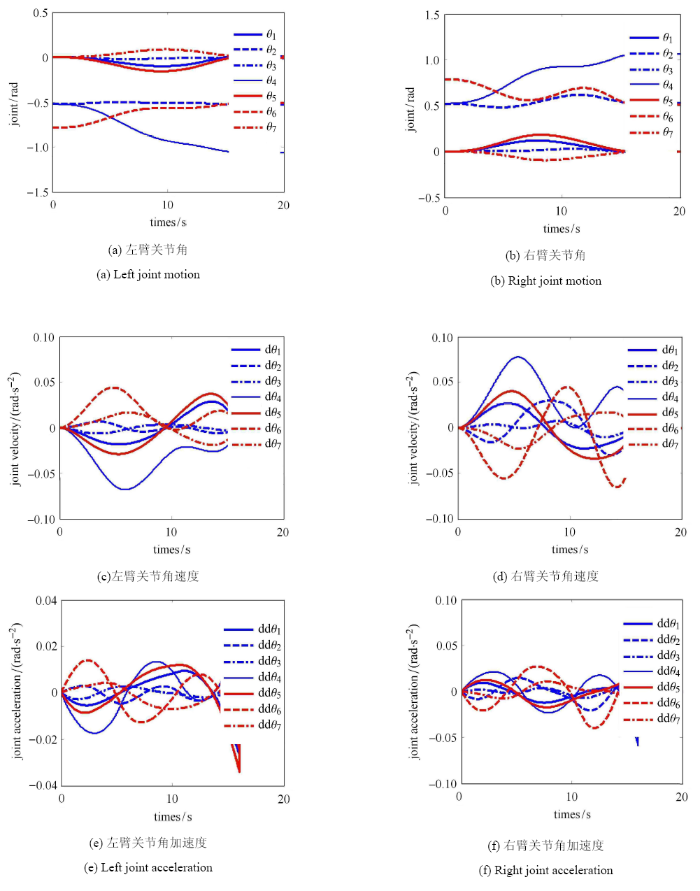
ͼ 7 �����˻�е��ִ�����滮·��������,��е�۹ؽڽǡ��ؽڽ��ٶ��Լ��ؽڽǼ��ٶȵı仯����. ���Կ���,����е�۵Ĺؽڽǡ��ؽڽ��ٶ��� ���ؽڽǼ��ٶȱ仯ƽ��,���ٶȺͼ��ٶȴ�С���������ڸ�����Χ��,�ֱ��� 0.1rad/s �� 0.1rad/s$^{2}$,�ҹؽڽ��ٶȺؽڽǼ��ٶȳ�ʼΪ��,����ʵ�����.
ͼ7
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ7����е�۹ؽڱ仯����
Fig.7Joint angle, velocity and acceleration
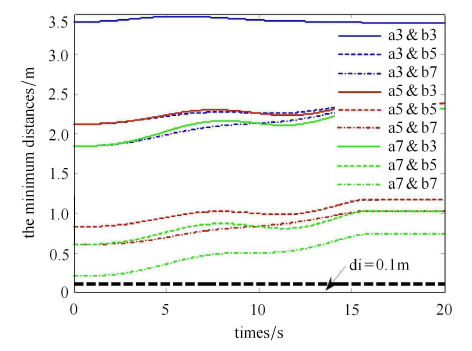
ͼ 8 �����˻�е��ĩ��ִ������ʵ�ʸ����������. ���Կ���,����ִ�й�����,ĩ��ִ������ʵ�ʸ��������� 10$^{-4}$ ����,�ɴ�˵��,ĩ���ܹ������Ϲ滮��·��,֤��������ƵĹ滮�㷨����ȷ��.����,��е�۸�������ִ�й�������δ������ײ,�������������ڰ�ȫ���� ($d_{i} =0.1$m) ����,��ͼ 9 ��ʾ.
ͼ8
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ8ĩ��ִ�����ĸ������
Fig.8Tracking error of end-effectors
ͼ9
 �´��ڴ�|����ԭͼZIP|����PPT
�´��ڴ�|����ԭͼZIP|����PPTͼ9��е�۸�����֮�����Ծ���
Fig.9The minimum distance between robot links
4 ����
���ǵ���ȫ�Ժ�����������,���������һ��˫�ۿռ������Э��·���滮����. ���� RRT* �㷨�ڷǽṹ�������п�������ĩ��ִ������ȫ���еij�ʼ·��,�������Ĵ���������,ƽ������ RRT* ���ɵij�ʼ·��,��֤�����������õ�״ִ̬�й滮��·��,ͬʱ�����˻�е��ĩ���Լ��ؽڵ���������Լ��. ������˵��������Э��·���滮��������Ч��.��¼ A ˫�ۿռ�������˶�ѧ��ģ
˫�ۿռ�����˸��������ĺ�ĩ��ִ������λ��ʸ�����Ա�ʾΪ���ò��ɹ�ʽ $\dot{\pmb r}={\pmb v}+{\pmb\omega}\times {\pmb r}$,�ռ�����˸��������ĺ�ĩ��ִ���������ٶȿ��Ա�ʾΪ
ͬʱ,���ؽں�ĩ��ִ�����Ľ��ٶȿ��Ա�ʾΪ
��ĩ��ִ���������ٶȺͽ��ٶ�ͳһ��ʾΪ
����
$\begin{array}{l} {\pmb J}_{\rm b}^k = \left[ \begin{array}{c} {\pmb J}_{\rm bv}^k \\ {\pmb J}_{\rm b\omega }^k \end{array} \right] = \left[ \begin{array}{cc} {\pmb E}_3 & - \tilde{\pmb p}_{\rm be}^k \\ 0 & {\pmb E}_3 \end{array} \right] \in {\pmb R}^{ 6\times 6} \\ {\pmb p}_{\rm be}^k = {\pmb p}_{\rm e}^k - {\pmb r}_{\rm b} \\ {\pmb J}_{\rm e}^k = \left[ \begin{array}{c} {\pmb J}_{\rm ev}^k \\ {\pmb J}_{\rm e\omega }^k \end{array} \right] \in {\pmb R }^{6\times n_k } \end{array} $
${\pmb J}_{\rm b}^k $ Ϊ������˶���ص��ſɱȾ���,${\pmb J}_{\rm bv}^k $, ${\pmb J}_{\rm b\omega }^k $ Ϊ ${\pmb J}_{\rm b}^k $ �ķֿ����,�ֱ��Ӧ���������ٶȺͽ��ٶ�. ${\pmb J}_{\rm e}^k $ Ϊ���е���˶���ص��ſ˱Ⱦ���,���Ƶ�, ${\pmb J}_{\rm ev}^k $,${\pmb J}_{\rm e\omega }^k $ Ϊ���� ${\pmb J}_{\rm e}^k $ �ķֿ����.
��$\dot{\pmb x}_{\rm e}^k = \left[\!\! \begin{array}{l} {\pmb \upsilon}_{\rm e}^k \\ {\pmb \omega}_{\rm e}^k \end{array} \!\! \right]$, $\dot {\pmb x}_{\rm b} = \left[\!\! \begin{array}{l} {\pmb \upsilon }_{\rm b} \\ {\pmb \omega} _{\rm b} \end{array} \!\! \right]$,�� $k=2$ ʱ (��˫������),ʽ (A7) ��������
����,�ϱ� $a$ �� $b$ �ֱ��ʾ�������ڻ�е�� $a$ �� $b$.
��¼B ˫�ۿռ�����˶���ѧ��ģ
�����������շ��̽�������Ư��˫�ۿռ�����˵Ķ���ѧ��ģ,�ڶ����������շ�������ʽ��ʾ����,$q_i$ Ϊ����ϵͳλ�εĶ����Ĺ�������,$L$ ��Ϊ�������պ���,��ϵͳ�Ķ��� $T$ �Լ����� $V$ �����ϵ
˫�ۿռ������ϵͳ���ڿռ�����������,��� $V=0$,˫�ۿռ������ϵͳ�Ķ��ܰ��������������˶������Ķ���
$��ʽ (A3) ��ʽ (A5) ������ʽ,�õ�������ʽ��˫�ۿռ�����˶��ܱ���ʽ
���ڿռ������ϵͳ,$L=T$,����ʽ (B3) ��ʾ���������շ���,���Եõ�˫�ۿռ�����˵�һ�㶯��ѧ����
����,${\pmb c}_{\rm b}, {\pmb c}_{\rm m}^a, {\pmb c}_{\rm m}^b \in {\bf R}^6$ �ֱ�Ϊ���������е���˶���صķ�������,����������������;${\pmb f}_{\rm b} \in {\bf R}^6$Ϊ�����ڻ����ϵ�������������; ${\pmb\tau}^a_{\rm m}, {\pmb\tau}^b_{\rm m} \in {\bf R}^n$Ϊ��е�۹ؽڵ���������;����е��ĩ��ִ������Ŀ�귢����ײʱ,${\pmb f}_{\rm e}^a , {\pmb f}_{\rm e}^b \in {\bf R}^6$Ϊ��ײ������������������.
�ο����� ԭ��˳��
������ȵ���
������������
�����ڿ�Ӱ������
//
[��������: 1]
//
[��������: 1]
[��������: 1]
[��������: 1]
DOIURL

��Կռ�������������ʱ��Ҫ����ϰ�������⣬���һ������Ư���ռ�����˵Ļ������Ԥ����Ʒ��������ȣ���ģ��Ԥ����Ʒ�������£���е�۹ؽڵ��������ƣ�����ϰ����Ҫ��ͳһ����Ϊ���ſ��������µIJ���ʽԼ�������Եõ�����Ư���ռ�����˾������Զ��ι滮��ʽ�����ſ����ɡ���Σ������������������������и�Լ�������ȼ�����֤�����̶ȵ�����Լ���������µõ���������Ľ⣬��Ч�ֲ���ģ��Ԥ����Ʒ������ڿռ�����˿���ʱ����Լ�����ܵ������ſ������ⲻ���еIJ��㡣�������У��������ƿ����ɵ���Ч�ԡ���
DOIURL
��Կռ�������������ʱ��Ҫ����ϰ�������⣬���һ������Ư���ռ�����˵Ļ������Ԥ����Ʒ��������ȣ���ģ��Ԥ����Ʒ�������£���е�۹ؽڵ��������ƣ�����ϰ����Ҫ��ͳһ����Ϊ���ſ��������µIJ���ʽԼ�������Եõ�����Ư���ռ�����˾������Զ��ι滮��ʽ�����ſ����ɡ���Σ������������������������и�Լ�������ȼ�����֤�����̶ȵ�����Լ���������µõ���������Ľ⣬��Ч�ֲ���ģ��Ԥ����Ʒ������ڿռ�����˿���ʱ����Լ�����ܵ������ſ������ⲻ���еIJ��㡣�������У��������ƿ����ɵ���Ч�ԡ���
[��������: 1]
[��������: 1]
//
[��������: 1]
[��������: 1]
DOIURL
DOIURL [��������: 1]
URL [��������: 1]
URL [��������: 1]
DOIURL [��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��ʿ����].
[��������: 1]
[PhD Thesis].
[��������: 1]
[��������: 1]
//
DOIURLPMID [��������: 1]
This paper presents algorithms for optimal selection of needle grasp, for autonomous robotic execution of the minimally invasive surgical suturing task. In order to minimize the tissue trauma during the suturing motion, the best practices of needle path planning that are used by surgeons are applied for autonomous robotic surgical suturing tasks. Once an optimal needle trajectory in a well-defined suturing scenario is chosen, another critical issue for suturing is the choice of needle grasp for the robotic system. Inappropriate needle grasp increases operating time requiring multiple re-grasps to complete the desired task. The proposed methods use manipulability, dexterity and torque metrics for needle grasp selection. A simulation demonstrates the proposed methods and recommends a variety of grasps. Then a realistic demonstration compares the performances of the manipulator using different grasps.
DOIURL [��������: 1]
[��������: 1]
//
URLPMID [��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
[��������: 1]
DOIURL [��������: 1]
[��������: 1]
[��������: 1]
DOIURL [��������: 1]
DOIURL [��������: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}