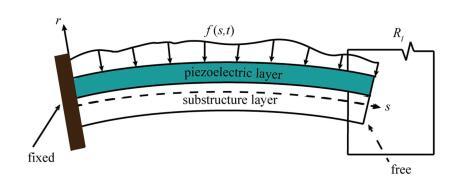
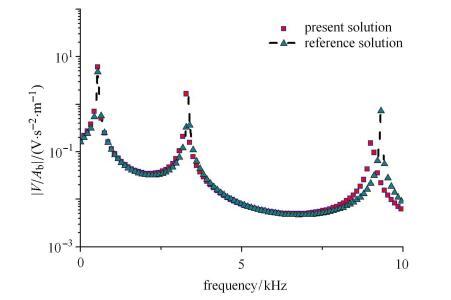
Abstract This article investigates the forced vibrations of curved piezoelectric energy harvesters by means of Green's functions. The differential method is used to analyze the in-plane forces of the cantilevered piezoelectric energy harvester. According to the governing equations of motion, the electromechanical coupled Prescott models are derived based on the piezoelectric constitutive relations, which the circumferential forcing and the circumferential inertia term can be negligible, and a damping effect, radial damping, is taken into account. Utilizing the Laplace transform, the explicit expressions of the Green's functions of the coupled vibration equations can be acquired. On the basis of the superposition principle and the physical interpretation of Green's functions, the coupled system is decoupled and the expression of the output voltage can be obtained analytically. The present model for the curved beam can be readily reduced to straight beam. In the numerical sections, the present solutions are verified by the results in some published references. By comparing with the result of traditional straight piezoelectric energy harvesters model, the high energy harvesting efficiency of the curved piezoelectric energy harvesters model in the thesis is demonstrated. It is apparent that the present model has a wider range of application than the existing ones. The influence of radial damping, Young's modules of two materials and some other essential physical parameters on the evaluation functions for output voltage and resonant frequency are discussed. This research suggests that to make the electric power reach the maximum value, the optimal resistive load is 1 M$\Omega$; the elasticity modulus for both piezoelectric material and structure material have a profound effect on the resonant frequency. By replacing the base materials with lower modulus of elasticity, the phenomenon of high frequency resonance can be improved to make the curved piezoelectric energy harvesters adapt to more complex working environment. However, the energy harvesting efficiency of the structure will be decline. Keywords:curved energy harvester;piezoelectric materials;Green's function;Laplace transform;electromechanical
PDF (3450KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文 本文引用格式 何燕丽, 赵翔. 曲梁压电俘能器强迫振动的格林函数解 1). 力学学报[J], 2019, 51(4): 1170-1179 DOI:10.6052/0459-1879-19-007 He Yanli, Zhao Xiang. CLOSED-FORM SOLUTIONS FOR FORCED VIBRATIONS OF CURVED PIEZOELECTRIC ENERGY HARVESTERS BY MEANS OF GREEN'S FUNCTIONS 1). Chinese Journal of Theoretical and Applied Mechanics[J], 2019, 51(4): 1170-1179 DOI:10.6052/0459-1879-19-007
WangC, ZhaoJ, LiQ , et al. Optimization design and experimental investigation of piezoelectric energy harvesting devices for pavement Applied Energy, 2018,229:18-30 DOIURL [本文引用: 1]
PollaDL, FrancisLF . Processing and characterization of piezoelectric materials and integration into microelectromechanical systems Annual Review of Materials Science, 1998,28(1):563-597 DOIURL [本文引用: 1]
AminiY, HeshmatiM, FatehiP , et al. Piezoelectric energy harvesting from vibrations of a beam subjected to multi-moving loads Applied Mathematical Modelling, 2017,49:1-16 DOIURL [本文引用: 1]
( WuManqiao, ZhuJihong, YangKaike , et al. Integrated layout and topology optimization design of piezoelectric smart structure in accurate shape control Chinese Journal of Theoretical and Applied Mechanics, 2017,49(2):380-389 (in Chinese)) [本文引用: 1]
( XuXin, LiShirong . Analysis of thermoelastic damping for functionally graded materail micro-beam Chinese Journal of Theoretical and Applied Mechanics, 2017,49(2):308-316 (in Chinese)) [本文引用: 1]
( ZhengBaojing, LiangYu, GaoXiaowei , et al. Analysis for dynamic response of functionally graded materials using POD based reduced order model Chinese Journal of Theoretical and Applied Mechanics, 2018,50(4):787-797 (in Chinese)) [本文引用: 1]
SuZ, JinG, YeT . Vibration analysis and transient response of a functionally graded piezoelectric curved beam with general boundary conditions Smart Materials & Structures, 2016,25(6):065003 [本文引用: 1]
PandaPK . Review: environmental friendly lead-free piezoelectric materials Journal of Materials Science, 2009,44(19):5049-5062 DOI [本文引用: 1]
( ZhouJianwei, ChenWeiqiu . Surface waves in a piezoelectri half-space with surface effect Chinese Journal of Theoretical and Applied Mechanics, 2017,49(3):597-604 (in Chinese)) [本文引用: 1]
DietlJM, WickenheiserAM, GarciaEA . Timoshenko beam model for cantilevered piezoelectric energy harvesters Smart Materials & Structures, 2010,19(5):055018 [本文引用: 1]
SchoeftnerJ, KrommerM . Single point vibration control for a passive piezoelectric Bernoulli-Euler beam subjected to spatially varying harmonic loads Acta Mechanica, 2012,223(9):1983-1998 DOIURL [本文引用: 1]
SoedelW . Vibrations of Shells and Plates New York: Marcel Dekker, 1981 [本文引用: 2]
GauravK, SonamK, SinghalV , et al. Modal parameter-based damage identification in cylindrical pipe using dynamic response Procedia Engineering, 2017,199:1988-1993 DOIURL [本文引用: 1]
( CaoDongxing, WuPeng, ZhangWei , et al. Nonlinear vibration of a novel piezoelectric vibration energy harvester Journal of Dynamics and Control, 2015(4):300-307 (in Chinese)) [本文引用: 1]
( TangLiping, WangJianguo . Modeling and analytical solution of piezoelectric cantilevered energy harvester with a new dynamic magnifier Chinese Journal of Computational Mechanics, 2017,34(5):650-656 (in Chinese)) [本文引用: 1]
( GuoKangkang . Dynamic characteristics and electricity generation performance of a bistable piezo-magneto-elastic energy harvester. [PhD Thesis] Tianjin: Tianjin University, 2015 (in Chinese)) [本文引用: 1]
( YueGuoqiang . The simulation and experimental study on the power generation of the cantilever piezoelectric energy harvester. [Master Thesis] Harbin: Harbin Institute of Technology, 2011 (in Chinese)) [本文引用: 1]
ZhaoX, YangEC, LiYH , et al. Closed-form solutions for forced vibrations of piezoelectric energy harvesters by means of Green's functions Journal of Intelligent Material Systems and Structures, 2017,28(17):2372-2387 DOIURL [本文引用: 2]
( ZhouYong, LiShi, ZhouBeiyue . Study on a piezoelectric curve cantilevered beam harvester Piezoelectrics and Acoustooptics, 2014,36(2):237-240 (in Chinese)) [本文引用: 1]
TsengYP, HuangCS, LinCJ . Dynamic stiffness analysis for in-plane vibrations of arches with variable curvature Journal of Sound & Vibration, 1997,207(1):15-31 [本文引用: 1]
ManoachE, RibeiroP . Coupled, thermoelastic, large amplitude vibrations of timoshenko beams International Journal of Mechanical Sciences, 2004,46(11):1589-1606 DOIURL [本文引用: 2]
ErturkA, InmanDJ . A distributed parameter electromechanical model for cantilevered piezoelectric energy harvesters Journal of Vibration & Acoustics, 2008,130(4):1257-1261 [本文引用: 1]
Danesh-YazdiAH, ElvinN, AndreopoulosY . Green's function method for piezoelectric energy harvesting beams Journal of Sound & Vibration, 2014,333(14):3092-3108 [本文引用: 3]
ChidamparamP, LeissaAW . Vibrations of planar curved beams, rings, and arches Applied Mechanics Reviews, 1993,46(9):467-483 DOIURL [本文引用: 1]
LiXY, ZhaoX, LiYH . Green's functions of the forced vibration of Timoshenko beams with damping effect Journal of Sound & Vibration, 2014,333(6):1781-1795 [本文引用: 2]
ShiGY, WangDL, BuSD , et al. Piezoelectric properties of low loss and high curie temperature (Bi, La)FeO$_{3}$-Pb(Ti, Mn)O$_{3}$ ceramics with Mn doping Rare Metals, 2012,31(6):595-598 DOIURL [本文引用: 1]
ZhangSJ, RandallCA, ShroutTR . Recent developments in high curie temperature perovskite single crystals. IEEE Transactions on Ultrasonics, Ferroelectrics and Frequency Control, 2005,52(4):564-569 DOIURL [本文引用: 1]
LeadenhamS, ErturkA . Unified nonlinear electroelastic dynamics of a bimorph piezoelectric cantilever for energy harvesting, sensing, and actuation Nonlinear Dynamics, 2015,79(3):1727-1743 DOIURL [本文引用: 1]
LeadenhamS, FerriB, ErturkA . Modeling and identification of nonlinear electroelastic and dissipative parameters for PZT-5A and PZT-5H bimorphs: a dynamical systems approach Active and Passive Smart Structures and Integrated Systems, 2015,9431, doi: 10.1117/12.2084455 [本文引用: 1]
 ,2)西南石油大学土木工程与建筑学院,成都 610500
,2)西南石油大学土木工程与建筑学院,成都 610500
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT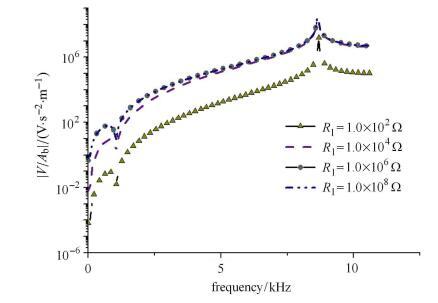 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT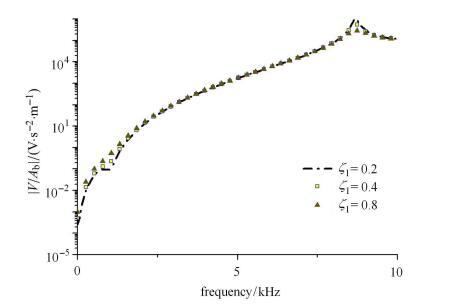 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT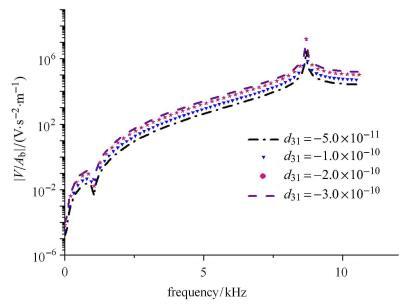 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT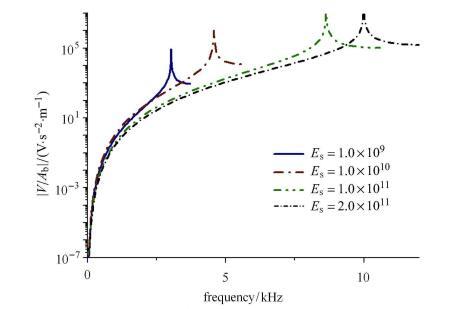 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}