MODEL SMOOTHING METHODS IN NUMERICAL ANALYSIS OF FLEXIBLE MULTIBODY SYSTEMS
QiZhaohui1,*,, CaoYan1, WangGang2,*, 1Department of Engineering Mechanics, Dalian University of Technology, Dalian 116023, China2School of Ocean Science and Technology, Dalian University of Technology, Panjin 124221, Liaoning, China ; 中图分类号:O313.7 文献标识码:A
关键词:多柔体系统;模型光滑化;刚性微分方程;变形虚功率;虚功率方程 Abstract Dynamic equations of flexible multibody systems are usually a set of stiff differential equations. At present, the common numerical method for solving the stiff differential equations filters out the high frequency by using the numerical damping. The computational efficiency of this method is still unsatisfactory. In order to reduce the stiffness of dynamic equations of flexible multibody systems so greatly that the equations can be solved by regular ordinary differential equation (ODE) solvers such as MATLAB ODE45 solver, methods of filtering high frequency vibrations during the process of modeling are studied. Stresses of flexible bodies are homogenized by their mean value over a time interval from now to a short time later. The homogenized stress is then employed to replace its origin when computing the virtual deformation power. In this way, the obtained model of the flexible multibody system will not contain harmful high frequency elastic vibrations. The range of frequencies can be controlled by the length of the time interval used to homogenize stresses. As validated by the numerical examples in this paper, the precision and efficiency of the proposed method are comparable to some stiff ODE solvers. Moreover, it works well when the stiff ODE solver fails to give correct solutions in a reasonable time. Comparisons of numerical examples show that the proposed method can be a new available approach to numerical analysis of flexible multibody systems.
分别采用MATLAB的刚性方程求解器radau5 和ODE45求解器分别对该问题进行数值积分, 取精度控制参数和. 得到双摆机构上末端点在竖直方向和水平方向的位移, 分别如图6和图7所示. 显示原图|下载原图ZIP|生成PPT 图6末端点的轴向变形. -->Fig.6Axial deformation of the end point -->
显示原图|下载原图ZIP|生成PPT 图7末端点的横向挠度. -->Fig.7Lateral deflection of the end point -->
(TianQiang, LiuCheng, LiPei, et al.Advances and challenges in dynamics of flexible multibody systems .Journal of Dynamics and Control, 2017, 15(5): 385-405 (in Chinese)) [本文引用: 1]
(WangQi, ZhuangFangfang, GuoYiyuan, et al.Advances in the research on numerical methods for non-smooth dynamics of multibody systems .Advances in Mechanics, 2013, 43(1): 101-111 (in Chinese)) [本文引用: 1]
(LiuCaishan, ChenBin, PengHan, et al.Numerical resolution of multibody systems with multiple contact/impact points .Journal of Dynamics and Control, 2003, 1(1): 59-65 (in Chinese)) [本文引用: 1]
(YaoWenli, YueRong.Advance in controversial restitution coefficient study for impact problems .Journal of Vibration and Shock, 2015, 34(19): 43-48 (in Chinese)) [本文引用: 1]
[5]
StechlinskiPG, BartonPI.Dependence of solutions of nonsmooth differential-algebraic equations on parameters .Journal of Differential Equations, 2017, 262(3): 2254-2285 [本文引用: 2]
[6]
DhamacharoenA.Efficient numerical methods for solving differential algebraic equations .Journal of Applied Mathematics & Physics, 2016, 4(1): 1-9 [本文引用: 1]
[7]
PetzoldL.Differential/algebraic equations are not ODE’S .Siam Journal on Scientific & Statistical Computing, 2012, 3(3): 367-384 [本文引用: 1]
[8]
ShampineLF, ReicheltMW, KierzenkaJA.Solving index-I DAEs in MATLAB and simulink .Siam Review, 1999, 41(3): 538-552 [本文引用: 1]
[9]
GearCW, PetzoldLR.ODE methods for the solution of differential /algebraic systems .Siam Journal on Numerical Analysis, 1984, 21(4): 716-728 [本文引用: 1]
[10]
HaddouniM, AcaryV, GarreauS, et al.Comparison of several formulations and integration methods for the resolution of DAEs formulations in event-driven simulation of nonsmooth frictionless multibody dynamics .Multibody System Dynamics, 2017, 41(3): 201-231 [本文引用: 1]
[11]
MarquesF, Souto AP, FloresP.On the constraints violation in forward dynamics of multibody systems .Multibody System Dynamics, 2016, 39(4): 1-35 [本文引用: 1]
[12]
SchweizerB, LuD, LiP.Co-simulation method for solver coupling with algebraic constraints incorporating relaxation techniques .Multibody System Dynamics, 2016, 36(1): 1-36 [本文引用: 1]
(PanZhenkuan, ZhaoWeijia, HongJiazhen, et al.On numerical algorithms for differential/algebraic equations of motion of multibody system .Advances in Mechanics, 1996, 26(1): 26-40 (in Chinese)) [本文引用: 1]
(YuanXinding.Numerical Methods for Solving Initial Value Problems of Stiff Ordinary Differential Equations. Beijing: Science Press, 1987 (in Chinese)) [本文引用: 3]
(ChengZhengxing.Numerical Approximation and Numerical Solution of Ordinary Differential Equation. Xi’an: Xi’an Jiaotong University Press, 2000 (in Chinese)) [本文引用: 2]
IbrahimZ, NasirNM, OthmanK, et al.Adaptive order of block backward differentiation formulas for stiff ODEs .Numerical Algebra, 2017, 7(1): 95-106 [本文引用: 1]
[18]
El-ZaharER, HabibHM, RashidiMM, et al.A comparison of explicit semi-analytical numerical integration methods for solving stiff ODE systems .American Journal of Applied Sciences, 2015, 12(5): 304-320 [本文引用: 1]
[19]
ArielG, EngquistB, TsaiR.A multiscale method for highly oscillatory ordinary differential equations with resonance .Mathematics of Computation, 2009, 78(266): 929-956 [本文引用: 1]
[20]
TokmanM.Efficient integration of large stiff systems of ODEs with exponential propagation iterative (EPI) methods .Journal of Computational Physics, 2006, 213(2): 748-776 [本文引用: 1]
[21]
MeijaardJP.Application of Runge-Kutta-Rosenbrock methods to the analysis of flexible multibody systems .Multibody System Dynamics, 2003, 10(3): 263-288 [本文引用: 1]
[22]
ShabanaAA, HusseinBA.A two-loop sparse matrix numerical integration procedure for the solution of differential/algebraic equations: Application to multibody systems .Journal of Sound & Vibration, 2009, 327(3): 557-563 [本文引用: 1]
[23]
YenJ, PetzoldL, RahaS.A time integration algorithm for flexible mechanism dynamics: the DAE α-method .Computer Methods in Applied Mechanics and Engineering, 1998, 158(3): 341-355 [本文引用: 1]
[24]
ArnoldM, BrülsO.Convergence of the generalized-α, scheme for constrained mechanical systems .Multibody System Dynamics, 2007, 18(2): 185-202 [本文引用: 1]
(GuoXian, ZhangDingguo, ChenSijia.Application of Hilber-Hughes-Taylor<inline-formula><mml:math xmlns:mml="http://www.w3.org/1998/Math/MathML" id="Mml187-0459-1879-50-4-863"><mml:mo>-</mml:mo><mml:mi>α</mml:mi></mml:math></inline-formula> method to dynamics of flexible multibody system with contact and constraint .Acta Physica Sinica, 2017, 66(16): 144-154 (in Chinese)) [本文引用: 1]
(GuoXian, ZhangDingguo.Comparative study of typical numerical integration methods of flexible multi-body systems dynamics .Journal of Nanjing University of Science and Technology, 2016, 40(6): 726-733 (in Chinese)) [本文引用: 1]
[29]
BanerjeeA.Flexible Multibody Dynamics: Efficient Formulations and Applications. John Wiley & Sons , Inc., 2016 [本文引用: 3]
(ZhangZhigang, QiZhaohui, WuZhigang.Rigid-flexible dynamics analysis of a large deformation beam element based on interpolation of strains .Journal of Vibration Engineering, 2015, 28(3): 337-344 (in Chinese)) [本文引用: 1]
 , 曹艳
, 曹艳 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT



 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT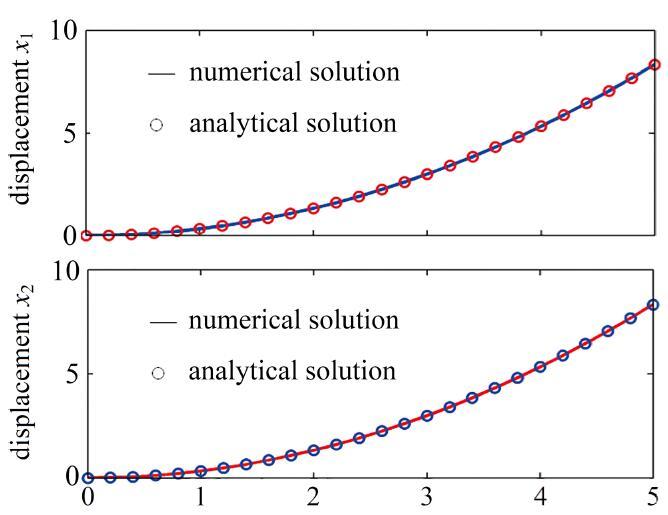 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT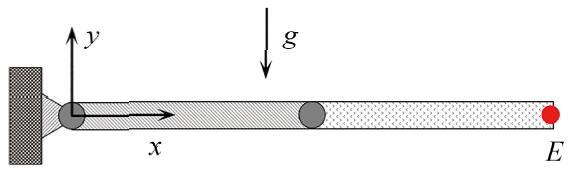 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT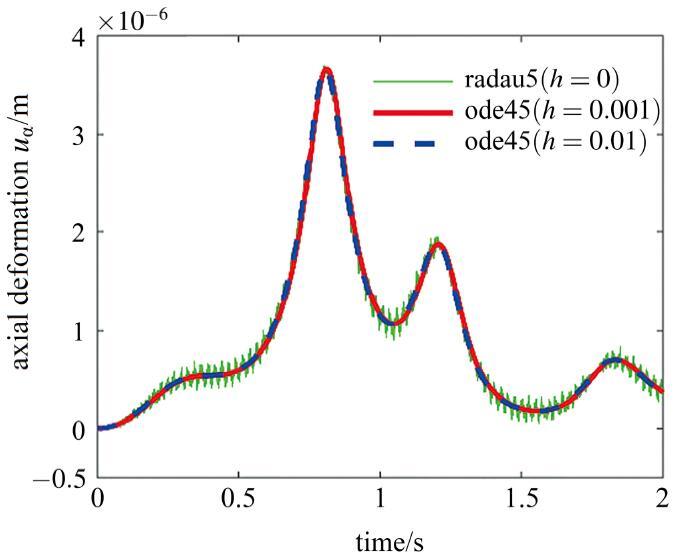 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT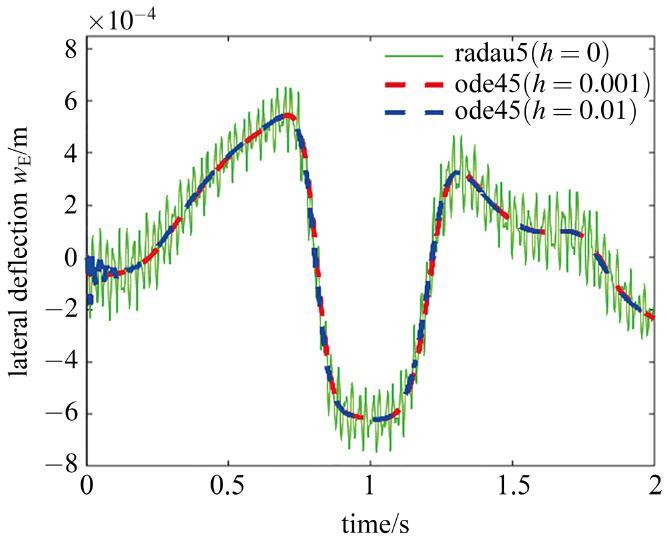 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}