MODIFIED SEMI-ANALYTICAL SENSITIVITY ANALYSIS AND ITS ERROR CORRECTION TECHNIQUES
ZhangLidan, ZhangSheng, ChenBiaosong*,, LiYunpeng State Key Laboratory of Industrial Equipment , Dalian University of Technology , Dalian 116024, China 中图分类号:TB12 文献标识码:A
关键词:结构优化;半解析灵敏度分析法;误差修正;形状优化;改进算法 Abstract Modified semi-analytical sensitivity analysis algorithm and its error correction term method are presented, where the sensitivity analysis terms and the error correction term can be separated. The method can facilitates program implementation and the accuracy of the method won’t be influenced by perturbation step length and number of elements. Firstly, a modified semi-analytical sensitivity analysis technique with its error correction term is presented for static displacement, which is based on global structure equations of the sensitivity analysis, and its program implementations are provided. Then, the modified method is implemented on other analysis tasks including natural frequency and linear buckling analysis. Consequently, the error correction terms of both beam elements and shell elements are derived. Then, the specific deducing process of error correction terms concerning beam and shell elements is described. Next, the modified method is verified by typical finite element models with beam and shell elements. The results highlight the applicability of the modified method to various analysis types mentioned above, and the accuracy is not influenced by the number of elements and perturbation step length. Since sensitivity analysis parts and error correction term can be computed respectively, the error correction term can becomputed independently and added directly to the results of sensitivity analysis, which can make full use of existing sensitivity analysis programming. This modified method can help complex engineering structural design. Especially, compared to the original semi-analytical sensitivity analysis and error correction methods, the computational efficiency of the modified method is enhanced with respect to shape optimization design variables or shape combined with size optimization, which can provide new ideas for sensitivity analysis and its program implementation.
3.1.1测试模型 如图3所示悬臂梁, mm, mm, mm, 弹性模量 , 泊松比为0.3, 密度为 . 下文分别采用梁单元与壳单元模拟该悬臂结构. 将该悬臂结构长度 视为设计变量, 分别进行测试1: 灵敏度值随摄动步长变化与测试2: 划分单元数目变化的算例测试. 显示原图|下载原图ZIP|生成PPT 图 3悬臂梁模型. -->Fig. 3Cantilever beam model -->
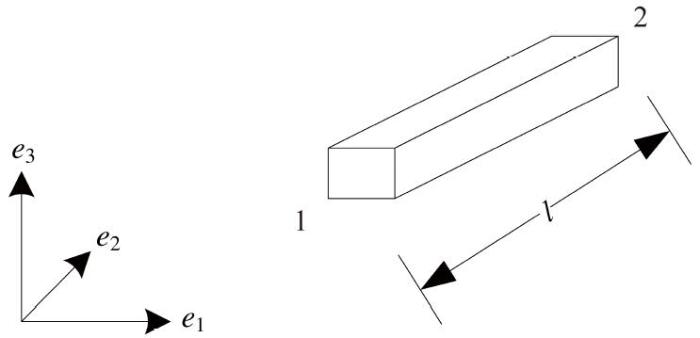
欧拉空间梁单元建模, 如图4. 测试1: 划分单元数为40个. 测试2: 划分单元数为20到100个. 静力分析时, 力方向如图, 大小为1 N. 屈曲分析时, 在梁末端施加. 柯西霍夫四边形空间壳单元建模, 如图5. 测试1: 沿梁高方向划分单元份数为2. 沿梁长方向划分单元份数为20. 测试2: 沿梁高方向单元份数为2不变, 沿梁长方向单元份数由10到100发生变化. 静力分析时, 力方向如图, 大小为1 N. 屈曲分析时, 在末端3个节点均施加 . 显示原图|下载原图ZIP|生成PPT 图 4梁单元构造有限元模型 -->Fig. 4Cantilever beam modeled by beam elements -->
显示原图|下载原图ZIP|生成PPT 图5壳单元构造有限元模型. -->Fig. 5Cantilever beam modeled by shell elements -->
3.1.2测试结果 测试针对静力分析位移灵敏度、自振、屈曲稳定性分析特征值灵敏度, 其中: GFD为全局差分法, SA 为无误差修正的半解析方法, ESA为带有经典误差修正项的半解析方法, MESA为带有改进误差修正项的改进半解析方法. 由于ESA与MESA方法经算例测试, 其数值、走势近乎重合, 因此ESA方法未列于图中. 设灵敏度精确值为 , 定义SA方法与MESA方法的相对灵敏度为 取 方向静力位移灵敏度( ), 自振基频灵敏度( ), 屈曲一阶特征值灵敏度( ). 图6图8 为相对灵敏度随摄动步长的变化规律, 其中 梁单元结果如图6(a) 图8(a), 用 表示. 壳单元结果如图6(b) 图8(b), 用 表示. 显示原图|下载原图ZIP|生成PPT 图 6静力位移相对灵敏度随摄动步长变化. -->Fig. 6Relationship between scaled sensitivity of displacement and perturbation step length in static analysis -->
显示原图|下载原图ZIP|生成PPT 图 7自振一阶特征值相对灵敏度随摄动步长变化. -->Fig. 7Relationship between scaled sensitivity of 1 eigenvalue and perturbation step length in natural frequency analysis -->
显示原图|下载原图ZIP|生成PPT 图 8屈曲一阶特征值相对灵敏度随摄动步长变化. -->Fig. 8Relationship between scaled sensitivity of 1 eigenvalue and perturbation step length in buckling analysis -->
SA方法, 在摄动步长较大时存在较大误差, 其符号有时也与稳定值相反, 随步长减小趋于稳定, 而GFD 与之相反, 在大步长时, 较为稳定, 小步长时存在较大误差, 对于MESA, 其在步长较大与较小时都能得到较好的结果. 对于静力位移与自振特征值灵敏度, 3种方法稳定值均能重合. 而对屈曲问题, SA方法, 对于梁单元模型, 稳定值在 时达到, 但与精确值不重合. 对于壳单元模型, 其稳定值也在 达到, 此时与精确值重合, 可见对于壳单元的形状优化使用半解析方法产生的误差较梁单元小. 经误差修正后, MESA法, 对于梁及壳单元, 数值稳定范围均为2到5, 且与精确值重合. 综上所述, 相对灵敏度随摄动步长变化, 用壳单元建模模拟梁结构产生的误差小于梁单元. 另外同SA 与GFD方法相比MESA方法可以得到较好结果, 有效的延长了半解析方法摄动步长的可用范围, 在一定程度上提高了其计算精度, 尤其对屈曲问题的改善较大. 图9~图11为相对灵敏度随单元数目的变化规律, 取. 梁单元结果绘于图9(a) 图11(a). 壳单元结果绘于图9(b) 图11(b). 显示原图|下载原图ZIP|生成PPT 图 9静力位移相对灵敏度随单元数变化. -->Fig. 9Relationship between scaled sensitivity of displacement and element number in static analysis -->
显示原图|下载原图ZIP|生成PPT 图 10自振特征值相对灵敏度随单元数变化. -->Fig. 10Relationship between scaled sensitivity of 1 eigenvalue and element number in natural frequency analysis -->
显示原图|下载原图ZIP|生成PPT 图 11屈曲特征值相对灵敏度随单元数变化. -->Fig. 11Relationship between scaled sensitivity of 1 eigenvalue and element number in buckling analysis -->
(ChengGengdong, WangLiu.Shape optimization of axisymmetric body and sensitivity analysis by quasi-analytical method .Journal of Dalian Institute of Technology, 1986, 25(3): 19-25 (in Chinese)) [本文引用: 1]
[2]
BletzingerKU, FirlM, DaoudF.Approximation of derivatives in semi-analytical structural optimization .Computers & Structures, 2008, 86(13): 1404-1416 [本文引用: 3]
[3]
Van KeulenF, HaftkaRT, KimNH.Review of options for structural design sensitivity analysis .Computer Methods in Applied Mechanics and Engineering, 2005, 194(30): 3213-3243 [本文引用: 1]
[4]
TakezawaA, KitamuraM.Sensitivity analysis and optimization of vibration modes in continuum systems .Journal of Sound and Vibration, 2013, 332(6): 1553-1566 [本文引用: 1]
[5]
LiuST, ChengGD, GuY, et al.Mapping method for sensitivity analysis of composite material property .Structural and Multidisciplinary Optimization, 2002, 24(3): 212-217 [本文引用: 1]
(GuYuanxian, ChengGengdong.Research and applications of numerical methods of structural shape optimization .Computational Structural Mechanics and Applications, 1993, 10(3): 321-335 (in Chinese)) [本文引用: 1]
(YiLong, PengYun, SunQin.Research of the optimal design based on the fem and improved sensitivity analysis .Journal of Mechanical Strength, 2008, 30(3): 483-487 (in Chinese)) [本文引用: 1]
FenyesP, LustRV.Error analysis of semianalytic displacement derivatives for shape and sizing variables, AIAA Journal, 1991, 29(2): 271-279 [本文引用: 1]
[12]
OlhoN, RasmussenJ.Study of inaccuracy in semi-analytical sensitivity analysis—a model problem, Structural Optimization, 1991, 3(4): 203-213 [本文引用: 1]
[13]
BarthelemyB, ChonCT, HaftkaRT.Accuracy problems associted with semi-analytical derivatives of static response .Finite Elements in Analysis and Design, 1988, 4(3): 249-265 [本文引用: 1]
[14]
PauliP, ChengGD, Rasmussen. On accuracy problems for semi-analytical sensitivity analyses .Journal of Structural Mechanics, 1989, 17(3): 373-384 [本文引用: 1]
(ChengGengdong, LiuYingwei.Study of error of semi-analytic sensitivity analysis in beam problems .Journal of Dalian University of Technology, 1989, 29(4): 415-422 (in Chinese)) [本文引用: 1]
[16]
BarthelemyB, HaftkaRT.Accuracy analysis of the semi-analytical method for shape sensitivity calculation .Mechanics of Structures and Machines, 1990, 18(3): 407-432 [本文引用: 2]
[17]
ChengGD, OlhoffN.Rigid body motion test against error in semi-analytical sensitivity analysis .Computers & Structures, 1993, 46(3): 515-527 [本文引用: 1]
[18]
Van KeulenF, De BoerH.Rigorous improvement of semi-analytical design sensitivities by exact differentiation of rigid body motions .International Journal for Numerical Methods in Engineering, 1998, 42(1): 71-91 [本文引用: 1]
[19]
De BoerH, Van KeulenF, VervenneK.Refined second order semi-analytical design sensitivities .International Journal for Numerical Methods in Engineering, 2002, 55(9): 1033-1051 [本文引用: 1]
[20]
OlhoffN, RasmussenJ, LundE.A method of “exact” numerical differentiation for error elimination in finite-element-based semi-analytical shape sensitivity analyses .Journal of Structural Mechanics, 1993, 21(1): 1-66 [本文引用: 1]
[21]
LundE, OlhoffN.Shape design sensitivity analysis of eigenvalues using ‘exact’ numerical differentiation of finite element matrices, Structural Optimization, 1994, 8(1): 52-59
[22]
WangWJ, ClausenPM, BletzingerKU.Improved semi-analytical sensitivity analysis using a secant stiffness matrix for geometric nonlinear shape optimization .Computers & Structures, 2015, 146: 143-151. [本文引用: 1]
(KangZhan, LuoYangjun.On structural optimization for non-probabilistic reliability based on convex models, Chinese Journal of Theoretical and Applied Mechanics, 2006, 38(6): 807-815 (in Chinese)) [本文引用: 1]
(KangZhan, ChengGengdong.Structural robust design concerning static and dynamic performance based on perturbation stochastic finite element method .Chinese Journal of Theoretical and Applied Mechanics, 2006, 38(1): 57-65 (in Chinese)) [本文引用: 1]
(WuManqiao, ZhuJihong, YangKaike, et al.Integrated layout and topology optimization design of piezoelectric smart structure in accurate shape control .Chinese Journal of Theoretical and Applied Mechanics, 2017, 49(2): 380-389 (in Chinese)) [本文引用: 1]
(LongKai, WangXuan, HanDan.Structural light design for steady heat conduction using multi-material .Chinese Journal of Theoretical and Applied Mechanics, 2017, 49(2): 359-366 (in Chinese)) [本文引用: 1]
(WangXuan, HuPing, ZhuXuefeng, et al.Topology description function approach using NURBS interpolation for 3D structures with self-weight loads .Chinese Journal of Theoretical and Applied Mechanics, 2016, 48(6): 1437-1445 (in Chinese)) [本文引用: 1]
(GuoXu, GuYuanxian, ZhaoKang.Adjoint shape sensitivity analysis based on generalized variational principle .Chinese Journal of Theoretical and Applied Mechanics, 2013, 45(2): 214-222 (in Chinese)) [本文引用: 1]
GuYX, ZhaoGZ, ZhangHW, et al.Buckling design optimization of complex built-up structures with shape and size variables .Structural and Multidisciplinary Optimization, 2000, 19(3): 183-191 [本文引用: 1]
 , 李云鹏
, 李云鹏
 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT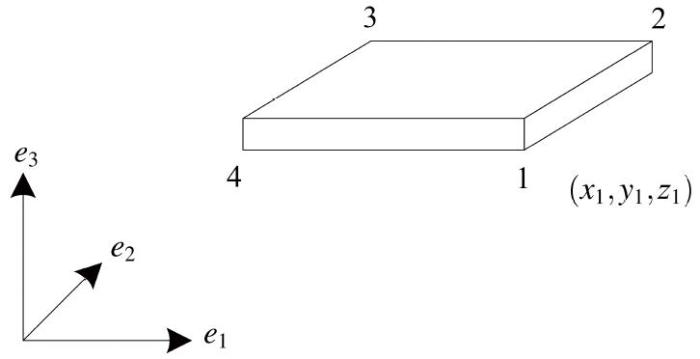 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT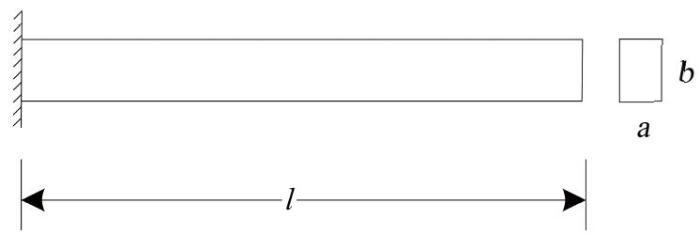 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT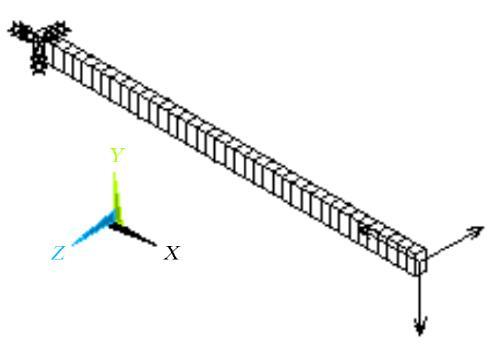 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT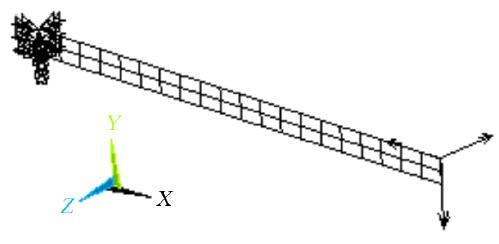 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT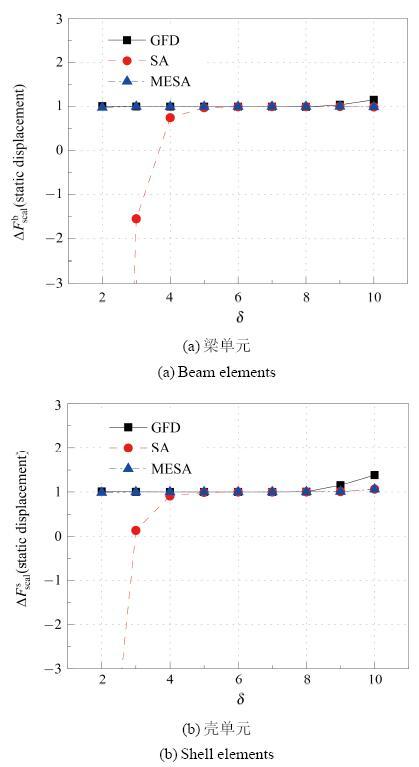 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT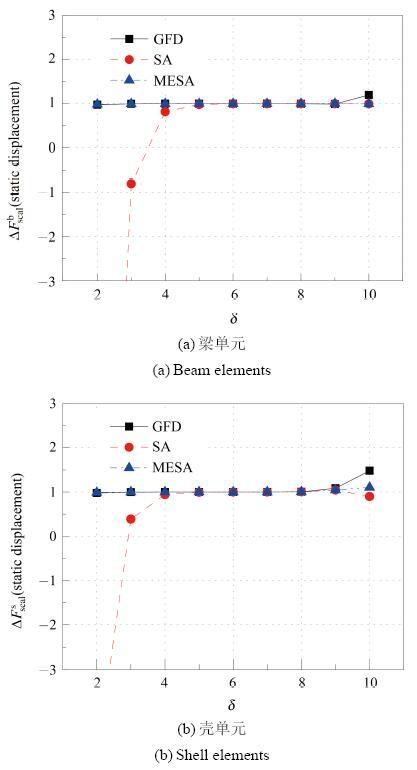 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT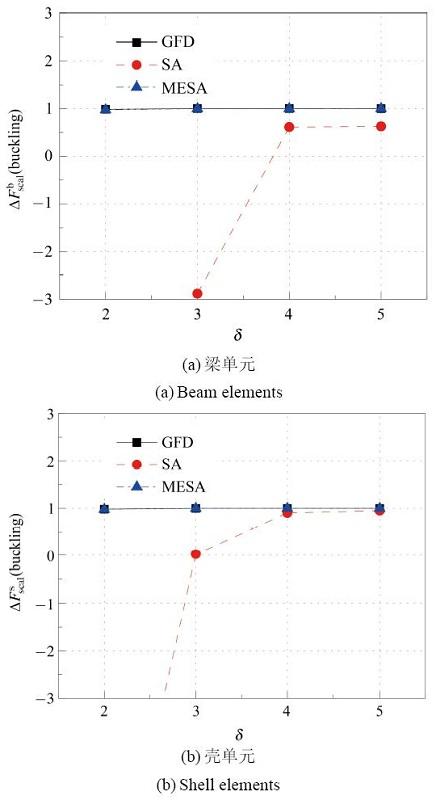 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT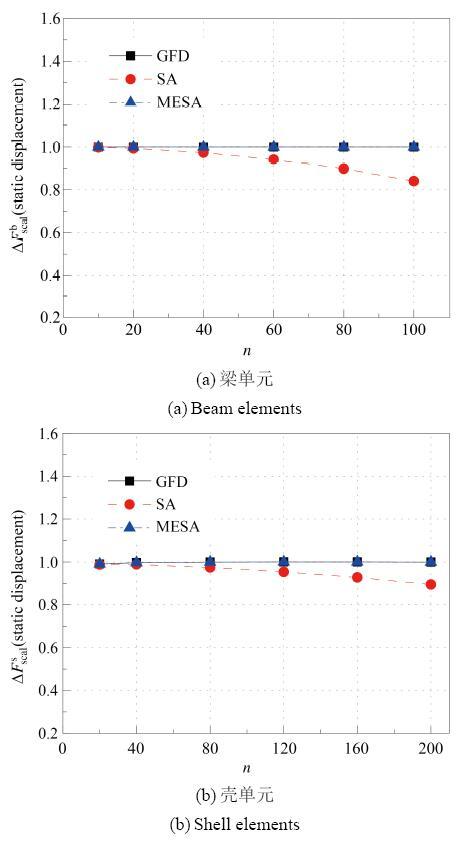 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT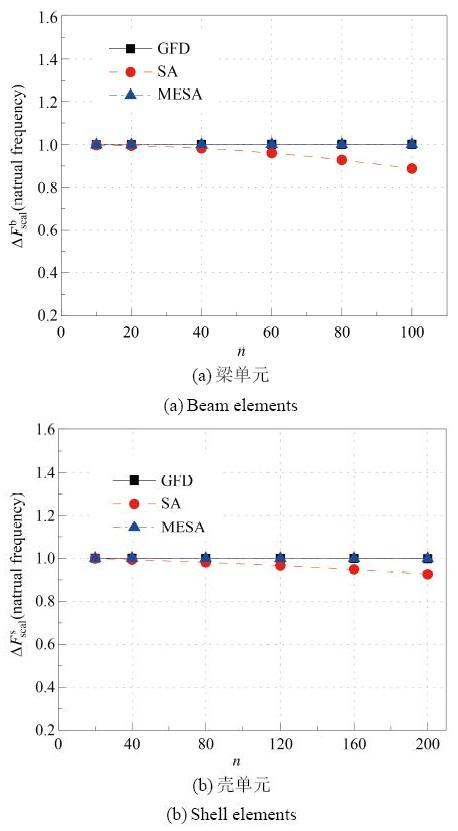 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT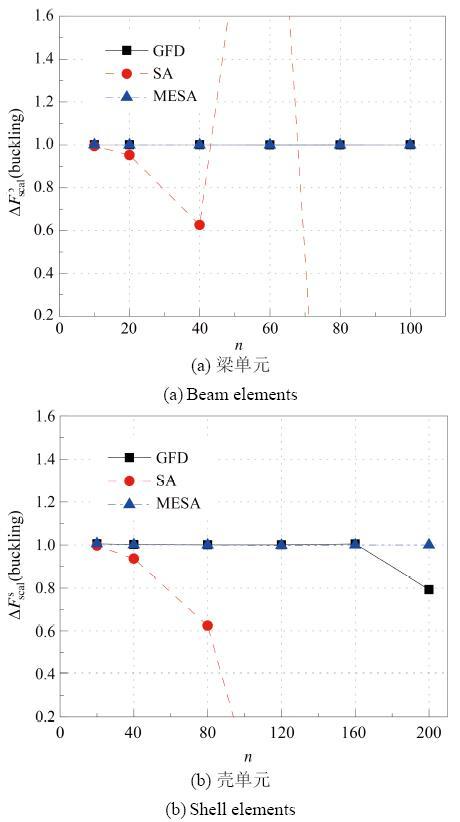 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT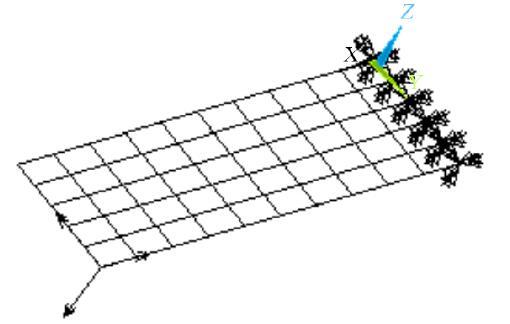 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT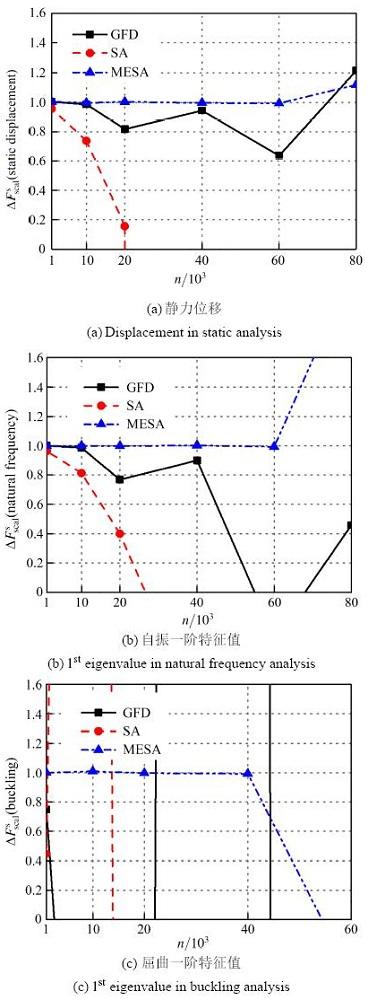 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}