0 引言
【研究意义】由于长时间降雨、地势低洼以及排水能力不足引起的涝渍灾害是一种极为常见且广泛的自然灾害,其发生频率高、影响范围广,对农业生产影响巨大[1-2]。玉米是中国主要的粮食作物,在中国农业经济乃至国民经济中具有重要地位[3-6]。玉米是水需求量大但不耐涝的农作物,当玉米长时间处在土壤湿度超过最大持水量80%以上的环境时,涝渍会引起玉米发生一系列生理生化和形态特征的变化,如根系因为缺氧而不能正常进行代谢,吸收水分和养分的能力下降;有氧呼吸受到抑制,无氧呼吸加强,在消耗大量养分的同时产生大量对根系有害的物质,叶片光合作用效率降低,生长发育受到抑制,严重时导致植株死亡[7-8]。随着农业生产技术的发展和田间管理的改善,玉米涝灾由于其本身的不可控性和难处理性已经逐渐成为影响玉米高产稳产的主要限制因素之一[9]。玉米不同生育阶段的耐涝性表现对玉米产量的影响是不同的,从播种到拔节期玉米耐涝能力较差,玉米拔节期以后抗涝能力则大幅度提高[10-15],研究结果表明,苗期、拔节期、抽雄期和灌浆期涝灾分别减产17.98%—54.97%、9.12%—100%、2.58%—28.63%和5.93%—20.28%[11]。寻求客观、快速地监测玉米涝灾发生范围和受灾程度的方法,定量评估涝灾对玉米产量可能造成的损失,准确地预测玉米在不同受灾情况下的减产率,有助于及时开展保险理赔和救灾补偿,最大限度地减少种植户受灾损失[16]。【前人研究进展】对于作物洪涝灾害监测,传统方法是采用地面人工调查,该方法耗费大量人力和物力,且效率低。近年来随着卫星遥感技术不断发展,利用遥感影像数据进行作物洪涝灾情监测的研究越来越多[17]。然而,随着对洪涝灾害监测时效性和精细化程度需求提高,遥感影像数据由于其时间和空间分辨率的限制,在洪涝灾害监测上精细程度还不够。激光雷达(LiDAR)作为主动遥感技术,具有快速直接获取目标表面模型,角度、距离和速度分辨率高,抗干扰能力强,可直接获取物体三维空间信息等优点,为植被冠层高度信息提取提供了重要支撑[18],正成为目前研究的热点。最早公开发表应用激光雷达进行森林参数测量的是前苏联[19],结果表明激光雷达估测的树高与摄影测量估测结果的均方根误差为14 cm。随后,机载激光雷达系统成功地用于大范围的森林资源清查和精准林业测量[20]。例如,GARCÍA等[21]通过高分辨率的机载LiDAR数据提取了樟子松树高和郁闭度用于建立生物量估算模型,结果显示出较好的模拟精度。SIMONSON等[22]利用高分辨率的机载LiDAR数据反演葡萄牙南部橡树林平均树高,与野外获取的平均树高之间的相关系数为0.85,发展了LiDAR数据反演林木参数的反演算法,极大推进了LiDAR在林业上的应用,为机载LiDAR推广应用和发展垫定了基础。庞勇等[23]基于高程归一化植被点云计算树高,精度都高于87%,总体平均精度为90.59%,且其中阔叶树的精度高于针叶树,但由于其获取的LiDAR数据点云密度较低,只能满足中国二类森林调查。董立新等[24]将激光雷达与光学遥感有效结合,发现GLAS+MERSI联合关系模型在区域森林冠顶高度估算中有较高精度,对于估算中国南方地区坡度较大地区森林冠顶高度有较广的应用潜力。周梦维等[25]利用激光雷达反演作物冠层高度,反演作物冠层高度的绝对误差在0.06 m以内,相对误差小于5.2%。大量试验研究结果表明,激光雷达对林木冠层高度反演技术已趋于成熟,为其应用于玉米涝灾灾情评估提供了方法上的借鉴。【本研究切入点】前人对激光雷达研究大多集中于林业,其应用于农业的研究鲜见报道,亟需探讨和研究农作物中激光雷达应用的思路和方法。【拟解决的关键问题】利用无人机载LiDAR数据和冠层高度模型(CHM)获取玉米冠层高度,基于正态统计理论的双阈值划分策略,结合研究区实地调查数据划分灾害等级,实现玉米涝灾受灾范围和灾情等级遥感制图,为灾情评估和灾后补救提供技术上的支撑。1 材料与方法
1.1 研究区概况
研究区位于北京市昌平区北京市农林科学院小汤山国家精准农业研究示范基地,地处北纬40°00′—40°21′,东经116°34′—117°00′,平均海拔约为36 m,占地面积约为1.08 hm2(图1)。其位于华北平原北部,属于北温带半湿润大陆性季风气候,年平均降水约为600 mm,年际变化大,且季节分配不均,主要降水集中在夏季(6—8月),降雨量占全年的70%以上。研究区夏玉米种植品种为京华8号,行距为60 cm,株距为30 cm,6月上旬播种,9月下旬收获,其主要生育期时段及时间如表1所示。受黄淮气旋北上影响,2016年7月19日至20日北京出现强暴雨,此次降雨从19日凌晨开始持续了55 h。据实验基地气象站统计,此次降水总量达到203 mm,相当于北京年降水量的1/3。这次强暴雨导致农田积水,玉米遭受涝渍灾害影响,其植株高度明显低于同播期非受灾区域的玉米。1.2 数据获取及处理
1.2.1 LiDAR数据获取及处理 于2016年9月3日开展了LiDAR航空飞行实验,飞行平台为RICOPTER(Riegl,Hom,Austria)八旋翼无人机,相对航高为30 m,使用的仪器为RIEGL公司生产的VUX-1UAV激光扫描器,激光波速发散角0.5 mrad,波长1 550 nm,脉冲发射频率550 kHz,激光脉冲长度3.0 ns,扫描角±40°,飞行速度22 km·h-1,地面光斑直径2 cm,重叠程度40%。航线南北向3条,为了确保有一部分高密度的点云,飞机十字交叉飞行了东西向2条航线。选取本次试验飞行中的所有航线进行数据处理,LiDAR点云数据采用WGS84坐标系,UTM投影北半球6度分带的第50带。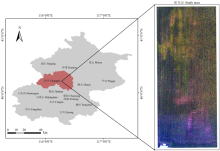 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图1研究区位置
-->Fig. 1Location of study area
-->
Table 1
表1
表1研究区玉米主要生育期时段及其时间
Table 1Main growth periods of maize in the study area
| 生育期 Growth stage | 播种—出苗 Seeding-Seedling | 出苗—拔节 Seedling-Jointing | 拔节—抽雄 Jointing-Male | 抽雄—灌浆 Male-Filling | 灌浆—成熟 Filling-Mature | 全生育期 Whole growth stage |
|---|---|---|---|---|---|---|
| 日期(月,日) Data(month,day) | 6.4-6.20 | 6.21-7.10 | 7.11-8.10 | 8.11-9.10 | 9.10-9.28 | 6.4-9.28 |
新窗口打开
机载激光雷达波形数据的格式现在还未统一,在使用这些激光雷达点云数据时必须先要转成LAS(美国摄影测量与遥感协会)标准格式。点云数据记录了玉米植株每个点的X、Y、Z坐标信息。利用仪器配套的软件RiPROCESS(奥地利 Riegl 公司)对获取的点云数据进行噪声去除和点云分类提取,分离玉米点云与地面点回波点云。本文采用了RiPROCESS软件的过滤方法,基于小波分层原理将地面点与地物点进行分离,该算法是一个由粗到精的过程,等效于格网加密的过程。首先,在初始格网单元划分点云数据,利用百分位数确定特征点,并根据这些特征点建立粗尺度的网格表面;然后,通过设置容许因子和坡度角阈值筛选地面点;最后,缩小格网单元,重复上述过程逐步由粗到细分离地面点和非地面点。
1.2.2 地面调查数据 根据实际获取的LiDAR点云数据的情况,在2016年9月20日进行了地面相关数据的采集工作。田间调查受灾严重和明显区域,首先,利用天宝手持式差分GPS(Trimble GeoExplorer 2008 Series GeoXH,MSAS广域差分,水平精度优于1 m)获取测量点坐标,从而确定其空间位置和范围。获取测量点时考虑到存在一定的位置偏差,采样点均选在受灾区内侧。然后,将获取的测量点与CHM结果进行匹配,利用这些冠层高度信息进行精度验证。最终,获取测量点坐标115个,样本区域7块,采样面积约为650 m2。
1.2.3 数码影像数据获取及处理 为了直观、全面地验证LiDAR数据对于玉米涝灾监测的适应性和精度,于2016年9月22日进行了数码影像数据的获取。数码影像数据获取采用的是深圳大疆创新科技有限公司(DJI)的精灵3(Phantom 3)。飞行高度约为50 m,飞行速度为2 m·s-1,航线为南北向一条。利用俄罗斯Agisoft LLC公司研发的Agisoft PhotoScan软件进行无人机数码影像的处理,满足航向重叠度达到60%—80%,最小不小于53%;旁向重叠度达到15%—60%,最小不小于8%,即可进行数据拼接工作。Agisoft PhotoScan软件通过数码影像导入、照片对齐、建立密集点云、生成网格等过程,最后生成正射影像图。
1.3 研究方法
本文算法流程图如图2所示。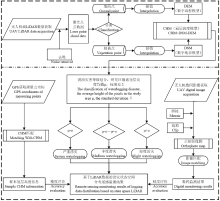 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图2数据处理流程图
-->Fig.2Flow chart of data processing
-->
1.3.1 LiDAR估测玉米冠层高度 激光雷达以脉冲激光作为技术手段,通过激光束扫描的方法测量传感器到地面照射点的距离,即通过测量地面采样点激光回波脉冲相对于发射激光主波之间的时间延迟获取传感器到地面采样点之间的距离。其计算公式为[23]:
R=(c×t)/2 (1)
式中,R为传感器到目标物的距离,c为光速,t为激光脉冲从激光器到目标物的往返时间。
1.3.2 灾害等级划分 采用正态统计理论的双阈值划分策略,提出一种基于涝灾导致冠层高度差异的玉米涝渍灾情等级监测方法。根据实际涝灾情况,对研究区野外测量进行涝灾等级划分,本文将玉米涝灾灾害划分为3个等级。灾害等级划分参考标准:70%以上减产的玉米划分为严重涝灾;30%—70%减产的玉米划分为中度涝灾;30%以下减产的玉米划分为轻度涝灾[16]。由于研究区地势较低,排水性较差,整个研究区均受洪涝影响,提取研究区内所有像素点的冠层高度信息,计算其均值μ和标准差σ,μ-σ和μ+σ作为判定其灾情等级的阈值分界点。
2 结果
2.1 玉米冠层高度反演结果
玉米冠层高度提取是试验的关键步骤,冠层高度反演精度直接影响涝灾灾害监测结果。冠层高度提取方法与数字高程模型(DEM)和数字地表模型(DSM)生成密切相关,本文基于小波分层原理将地面点与地物点进行分离,对分离出来的地面点进行克里金插值,空间插值的DEM格网为5 cm;同理生成DSM;求取DEM和DSM的差值,从而计算得到玉米冠层高度模型(canopy height model,CHM)。研究区南部的高度整体比北部低,高度较低的区域主要集中在中部以北偏西和东南部,尤其是东南部,高度在0.5 m以下。2.2 阈值确定
按照灾害等级评判标准对应的高度划分涝渍灾害程度阈值,由于整个研究区都受到或大或小洪涝影响,选取统计研究区所有像素点高度确定阈值。首先,高度在0.3 m以下的多为地面干扰点,为了避免地面点对于结果的影响,将其剔除[21, 26];之后,提取每一个像素点的高度,基于正态统计理论的双阈值划分策略,确定不同涝灾等级对应的高度分布。由统计结果可知(图3),其像元整体分布趋势符合正态分布。涝渍灾害区玉米高度均值为1.27 m,标准差为0.43,将0.84和1.70作为判定其灾情等级的阈值分界点,即严重涝灾高度为0.3—0.84 m,中度涝灾高度为0.84—1.70 m,高度在1.70 m以上的认为受涝渍灾害影响较小。 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图3涝灾区冠层高度的频率直方图和分布曲线
-->Fig. 3Frequency histogram and normal distribution curve of canopy heights in waterlogged area
-->
2.3 玉米涝灾灾情监测结果
根据玉米涝灾灾情监测方法对研究区的玉米涝渍灾害进行分级。通过阈值监测的灾情结果可以清晰地反映出整个研究区玉米的受灾空间分布及受灾严重程度。其中,南边整体受灾比北边严重,东南部受灾最为严重,中部以上偏东受涝灾较轻。图4-b中剔除的像元(高度在0.3 m以下像元)在严重涝灾区域较为集中,这是由于严重涝灾区玉米长势差,植株矮小,覆盖度低,致使部分地表裸露;同时,由于玉米种植的行株距导致沿着行列也有所分布,这一现象与实际情况较为吻合。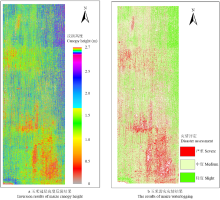 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图4反演玉米冠层高度及涝灾灾情评定
-->Fig. 4Canopy heights and waterlogging disaster evaluation of maize
-->
2.4 精度评价
本文利用数码影像数据对LiDAR数据反映的涝灾灾情结果进行了精度评价。数码影像简单、直观显示了玉米的长势、绿度、覆盖度等状况,大体明确了整块研究区玉米受涝灾灾害信息。通过与数码影像进行对照分析,LiDAR数据的空间分布监测结果与数码影像反映的灾情信息基本一致,尤其是严重涝灾区域(图5)。本文还采用混淆矩阵的方法进行定量评价。以地面实测样本区域作为标准,选取样本中严重涝灾和中度涝灾样区像素点的高度制成一个混淆矩阵,计算制图精度、用户精度、总体精度和Kappa值,其中各项指标越大代表精度越高(表2)。研究发现,严重涝灾制图精度57.25%,用户精度81.56%;一般涝灾制图精度87.06%,用户精度67.07%;总体精度为72.15%,Kappa系数为0.44。验证结果表明,基于无人机载LiDAR数
据的玉米涝灾灾情评估是可行的,可以实现对于区域内不同涝灾状态空间分布的遥感监测。
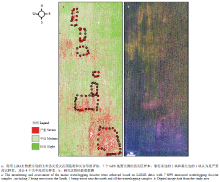 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图5地面实测及数码影像验证结果
-->Fig. 5Verification results of field survey and digital image
-->
Table 2
表2
表2涝渍灾害监测精度
Table 2Accuracy for waterlogging disaster detection
| 灾害等级 Disaster level | 制图精度 Mapping accuracy (%) | 用户精度 User accuracy (%) | 总体精度 Overall accuracy (%) | Kappa系数 Kappa coefficient |
|---|---|---|---|---|
| 严重 Severe | 57.25 | 81.56 | 72.15 | 0.44 |
| 一般 Medium | 87.06 | 67.07 |
新窗口打开
3 讨论
暴雨及强降雨过后,由于地势低洼程度及排水等因素的不同,致使玉米受涝灾程度有较大差异[27]。当降雨量过大时,在雨水聚集排水不良的洼地地片,玉米根系长时间缺氧无法正常呼吸,吸收水分和营养物质能力下降,使得营养生长受到影响,若渍水持续时间较长,根系因无氧呼吸产生酒精等有害物质致使作物死亡[28]。涝灾发生后,玉米植株长势存在明显差异,而且涝灾灾情越严重,其长势越差,所以可以通过能够表征作物长势的LiDAR数据来反演玉米涝灾的受灾程度[29-31]。本文获取了涝灾发生后灌浆期玉米LiDAR数据,通过对激光雷达点云数据进行预处理,从而将地面点与地物点分离,运用CHM模型得到玉米冠层高度,基于正态统计理论的双阈值划分策略进行阈值划分,构建了基于涝灾后冠层高度分布的玉米涝灾灾情遥感监测阈值模型,最终实现玉米涝灾的遥感监测。本文关于玉米涝灾的研究需要在玉米生育期后期(灌浆期、成熟期)进行,此时玉米植株高度基本停止生长[32],玉米冠层高度不再发生变化,若玉米还处在营养生长期,此时利用LiDAR数据获取的冠层高度与植株营养生长结束时会存在一定差异,为基于玉米冠层高度的涝灾遥感监测带来许多不确定性。通过正态统计理论的双阈值划分策略得到玉米受灾等级阈值,依据阈值进行灾情遥感监测,但是由于玉米品系、环境参数存在差异,所以该阈值的普适性还有待进一步验证。本文获取激光雷达点云数据、GPS数据、数码影像数据的时间上不完全一致,可能会对实验有一定的干扰。在今后的研究工作中,可以增加对玉米涝灾后多次玉米冠层高度数据的获取,分析其冠层高度变化速率,以求更加精确地进行涝灾监测,以便于后期进行灾情评估、产量减损评估。
4 结论
4.1 玉米遭遇涝灾后,其生长随着涝灾程度增加而变缓,甚至导致植株停止生长及死亡。表明涝灾越严重,玉米的长势越差,从而冠层高度越小,并且对冠层高度数据进行统计分析发现其大体上符合正态分布。4.2 通过提取涝灾区冠层高度数据,基于正态统计理论的双阈值划分策略,构建基于涝灾后冠层高度分布的玉米涝灾灾情遥感监测阈值模型,实现玉米涝灾受灾范围以及灾情等级空间分布制图。
4.3 通过数码影像数据进行定性分析,其空间分布监测结果与数码影像反映的灾情信息基本一致。同时,构建混淆矩阵,选择制图精度、用户精度、总体精度和Kappa系数4个指标进行精度验证。其中,严重涝灾制图精度57.25%,用户精度81.56%;中度涝灾制图精度87.06%,用户精度67.07%;总体精度为72.15%,Kappa系数为0.44,表明无人机载LiDAR数据可以用于玉米涝灾遥感监测。
The authors have declared that no competing interests exist.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}