0 引言
【研究意义】作物类型遥感识别对确定作物空间分布、作物估产、环境监测及人类活动都有重要的意义[1]。作物类型复杂多样,不同作物的反射光谱曲线明显不同,但曲线趋势大致相同,单独应用单时相影像较难,可以利用多时相影像、根据地物在不同时相的差异进行分类。【前人研究进展】近年来,国内外****先后开展了利用多时相影像、多种遥感数据对作物进行分类的相关研究[2-4]。各****利用不同遥感数据结合不同区域的特点进行研究,从而实现棉花估量、开发新的地理空间数据库、全球植被遥感监测[5-7]。然而,由于受天气、传感器等限制,不同的遥感数据存在质量、空间、光谱分辨率差异[8-9],不同分类器对不同数据源、不同作物光谱特征的敏感性不同[10];单独使用一种遥感数据难以获得覆盖完整生长期的时相信息。因此,综合不同遥感数据对作物进行分类,可为作物分类提供更准确、完整、可靠的信息。目前常见的利用多时相遥感影像进行作物分类的方法有决策树、支持向量机(SVM)、最大似然法、波谱角分析法、植被指数法等。利用不同遥感影像采用决策树对作物进行分类的应用最为广泛[11-14]。李鑫川等[15]、ZHANG等[16]、刘佳等[17]等利用NDVI时间序列对北方作物种类识别。王立辉等[18]、杨闫君等[19]分别采用HJ、高分1数据,利用SVM方法进行遥感图像分类,精度优于最大似然法分类。李彦等[20]采用最大似然分类方法进行多时相的作物分类。GOPAL等[21]、POTH等[22]通过神经网络分类,利用不同遥感数据实现了对不同研究尺度的土地覆盖分类。刘磊等[12]基于单时相多光谱数据提取了小麦、大麦、油菜、种植草场的种植信息,大多数****均采取多时相多光谱数据对作物进行分类。【本研究切入点】目前,新的分类方法层出不穷,但难以确定一种普适性强且分类精度高的方法。因此,确定作物分类时相及分类方法尤为重要,准确的农情监测与估产,需要尽可能早的作物空间分布数据。【拟解决的关键问题】本文以虎林市为研究区,获取不同传感器2014年5—10月共20幅影像,进行如下研究:(1)获取三种传感器NDVI时间序列曲线,并利用20幅影像依次波段合成的方式进行作物分类,确定作物分类关键时期及遥感时相;(2)提取土地利用覆被信息,利用耕地范围作为规则进行农作物分类;(3)利用耕地范围通过对比多种分类方法,并与不提取耕地直接作物分类进行比较,确定最优作物分类方法与时相。1 材料与方法
1.1 研究区概况
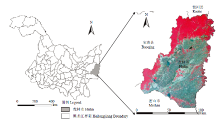
虎林市地处黑龙江省东部,位于45°23′—46°36′N,132°11′—133°56′E,以乌苏里江为界与俄罗斯联邦隔水相望(图1)。属于寒温带大陆性季风气候,生长期平均温度15.7℃,生长期降水量487.6 mm。土壤肥沃,水资源丰富,辖区内有7个农场,主要作物大豆、玉米、水稻。1.2 数据来源及处理
1.2.1 遥感数据 本文使用的遥感数据包括30 m的HJ-1A/HJ-1B_CCD数据、Landsat8-OLI数据、16 m的高分一号(GF-1_WFV)数据,共20幅(表1),以及黑龙江省30 m分辨率的DEM数据(下载地址:国际科学数据服务平台网址)。Table 1
表1
表1虎林市遥感影像列表
Table 1List of Hulin remote sensing images
| 日期 Date | 卫星传感器 Satellite sensor | 时间分辨率 Time resolution (d) | 空间分辨率 Spatial resolution (m) | 波段 Band | 质量评价 Quality evaluation |
|---|---|---|---|---|---|
| 2014-04-29 | GF1_WFV3 | 4 | 16 | 4 | 8 |
| 2014-05-01 | HJ1A-CCD1 | 2 | 30 | 4 | 9 |
| 2014-05-18 | HJ1B-CCD2 | 2 | 30 | 4 | 7 |
| 2014-05-19 | HJ1B-CCD1 | 2 | 30 | 4 | 8 |
| 2014-06-01 | Landsat8-OLI | 16 | 30( PAN/15) | 11 | 9 |
| 2014-06-04 | HJ1B-CCD1 | 2 | 30 | 4 | 6 |
| 2014-07-03 | Landsat8-OLI | 16 | 30( PAN/15) | 11 | 8 |
| 2014-07-04 | GF1_WFV4 | 4 | 16 | 4 | 9 |
| 2014-07-28 | GF1_WFV3 | 4 | 16 | 4 | 8 |
| 2014-08-09 | GF1_WFV2 | 4 | 16 | 4 | 8 |
| 2014-08-29 | HJ1B-CCD1 | 2 | 30 | 4 | 7 |
| 2014-09-21 | Landsat8-OLI | 16 | 30( PAN/15) | 11 | 9 |
| 2014-09-25 | HJ1B-CCD1 | 2 | 30 | 4 | 8 |
| 2014-10-01 | HJ1A-CCD1 | 2 | 30 | 4 | 7 |
| 2014-10-06 | GF1_WFV4 | 4 | 16 | 4 | 8 |
| 2014-10-10 | HJ1B-CCD2 | 2 | 30 | 4 | 9 |
| 2014-10-14 | GF1_WFV3 | 4 | 16 | 4 | 8 |
| 2014-10-18 | GF1_WFV3 | 4 | 16 | 4 | 8 |
| 2014-10-23 | Landsat8-OLI | 16 | 30( PAN/15) | 11 | 9 |
| 2014-10-29 | HJ1A-CCD1 | 2 | 30 | 4 | 7 |
新窗口打开
1.2.2 数据处理 对遥感影像进行辐射定标、大气校正、正射校正和自动匹配等预处理过程。由于所用影像分辨率不同,需统一影像空间分辨率,统一重采样为16 m[23]。通过ENVI软件进行(Layer Stacking),并利用波段运算提取归一化植被指数(NDVI)。
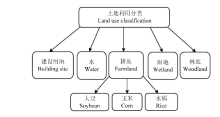
1.2.3 地面调查数据 根据2007年8月5日颁布的《土地利用现状分类》国家标准的一级类[24],将研究区土地利用覆盖划分为6个一级大类:水体、建设用地、耕地(旱地、水田)、林地和湿地。结合野外调查,运用人机交互的解译方法在遥感影像上选取训练区,每种地类选取25个样本,并在Google earth高空间分辨率影像上选取验证点,每种地类为30个,应用于土地利用分类提取耕地范围。农业保险公司通过高分辨影像数字化制图提供的4 467个投保地块,经地面调查确定投保地块精度达94.42%,将作物类型无误的2 276个地块应用于农作物分类,随机选1 138个训练样本(玉米271块、大豆163块、水稻709块),1 138个选为验证样本(玉米270块、大豆153块、水稻710块)。
 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图12014年6月11日虎林市Landsat-8影像图(R/G/B:5/4/3)
-->Fig. 1Landsat-8 image of Hulin in June 11, 2014 (R/G/B:5/4/3)
-->
1.3 主要农作物发育时期
研究区内种有大豆、玉米、水稻3种作物,其中水稻一般在4月播种,大豆、玉米在5月播种,生长期5个月左右。结合本文研究特点,从表2看出6月1日大豆、玉米处于出苗期,水稻处于插秧与分蘖期之间;7月4日大豆处于开花期与结荚期之间,玉米处于拔节与抽雄吐丝期之间,水稻处于分蘖与抽穗期之间;9月21日大豆、玉米、水稻均处于成熟期。表2以旬为时间单位给出了虎林市3种作物的发育时期。Table 2
表2
表2虎林市主要农作物发育时期
Table 2Major crop development periods in Hulin
| 月 Month | 4 | 5 | 6 | 7 | 8 | 9 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 旬 A period of ten days | 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 | 1 | 2 | 3 |
| 大豆 Soybean | 播种 Sowing | 出苗 Seeding | 开花 Flowering | 结荚 Podding | 成熟 Maturity | |||||||||||||
| 玉米 Corn | 播种 Sowing | 出苗 Seeding | 拔节 Jointing | 抽雄 Tasseling 吐丝 Spining | 乳熟 Milking maturity | 成熟 Maturity | ||||||||||||
| 水稻 Rice | 播种 Sowing | 插秧 Transplanting | 分蘖 Tillering | 抽穗 Heading | 成熟 Maturity | |||||||||||||
新窗口打开
1.4 研究方法
1.4.1 决策树分类模型构建 根据每种地物在遥感影像中的光谱差异,结合不同地类的色调、纹理特征,NDVI信息[25-29],通过决策树对研究区进行土地利用分类。构建决策树模型,根据各地类不同时相NDVI、各波段的反射率和纹理特点,统计6月1日、7月4日2个时期影像各波段的反射率和纹理的最大值、最小值、平均值、标准差。深入分析发现6月1日大部分水和少量水田的NDVI<0.03,其他地类NDVI≥0.03;林地6月1日ISODATA>8或7月4日的NDVI>1;建筑用地根据6月1日纹理特征与7月4日的蓝波段反射率结合将其提取出来。根据6种地类的最大值、最小值结合标准差确定阈值,按照图2所示的决策树分类模型进行分类,利用验证点对分类结果进行验证,当精度验证结果较低时,重新调整阈值进行分类,当精度改善不大时停止调整,接受目前的分类结果。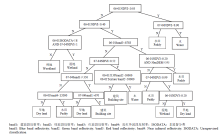 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图2虎林市土地利用覆被提取决策树模型
-->Fig.2Decision tree classification model of land use cover extraction in Hulin
-->
1.4.2 基于作物分类的监督分类方法对比 通过土地利用分类结果提取耕地,在耕地范围内对作物进行分类(图3)。通过GF-1高光谱和TM多光谱2种数据结合[30],分别利用监督分类中最大似然法、马氏距离法、神经网络法、最小距离法、支持向量机对研究区作物进行分类,GF-1、HJ高光谱和TM多光谱3种数据结合,利用监督分类中最大似然法、马氏距离法、波谱角分类法对研究区作物进行分类,确定最优方法与尽可能早的时相信息。
 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图3虎林市作物分类流程
-->Fig. 3Crop classification process in Hulin
-->
2 结果
2.1 作物NDVI时间序列曲线特征
通过20幅遥感影像的NDVI时间序列数据集,绘制不同作物NDVI随时间变化曲线(图4)。从图4可以看出,在6月1日水稻与玉米、水稻与大豆的NDVI差异显著,但是,大豆和玉米的NDVI差异不明显;7月4日大豆、水稻和玉米的NDVI均存在差异;8月9日三种作物的NDVI达到饱和;8月29日到9月25日三种作物的NDVI差异显著。因此以下研究可主要应用其中的影像作为研究的关键期,且通过影像质量和多次试验,最终把6月1日、7月4日作为本研究区作物分类的关键期。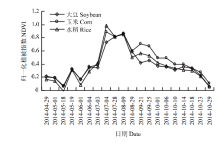 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图4基于遥感影像不同作物NDVI随时间变化曲线
-->Fig. 4The NDVI time curve of the different crops based on remote sensing images
-->
2.2 土地利用分类
利用6月1日、7月4日2个时期影像,对比决策树、面向对象分类和最大似然法3种方法进行土地利用分类,结果表明决策树分类总体精度最高。由土地利用分类结果可以看出,虎林市主要用地类型为建筑用地、耕地(旱地和水田)、水、林地、湿地(图5)。林地主要集中在虎林市北部和西部,占虎林市总面积26.62%;湿地主要集中在东部,占11.34%;虎林市大部分被耕地覆盖,耕地占虎林市总面积的56.65%,耕地主要为水田,占37.66%,旱地相对较少,占18.99%。2.3 时效性分析
将20幅遥感影像依次波段合成进行作物分类,例如:第一组为2014年5月19日,第二组为2014年5月19日、2014年6月1日2幅合成,第三组为2014年5月19日、2014年6月1日、2014年7月4日3幅合成,以此类推……。图6是以时间为横坐标,以作物分类精度为纵坐标生成的曲线图。从曲线可以看出7月初、7月末到8月初、9月末为3个关键时相,8月初之后分类精度变化不大,9月末分类精度达到最高,综合考虑时效性,7月上旬作物分类精度已基本达到较高精度。图6虎林市农作物分类时效性分析曲线
-->Fig. 6Analysis curve of time efficiency of crop classification in Hulin
-->
2.4 作物分类
从土地利用分类最优结果中提取的耕地范围。通过多种分类方法的综合对比分析最终发现,基于耕地范围的最大似然法对本研究区农作物分类最为精准(图7)。通过对分类结果分析可知,该区水稻的种植范围最广、覆盖面积最大,其次为玉米和大豆,这3类作物的种植比例与研究区内投保地块统计结果完全一致。虎林市水稻面积占耕地总面积的75.24%,玉米占14.45%,大豆仅占10.31%。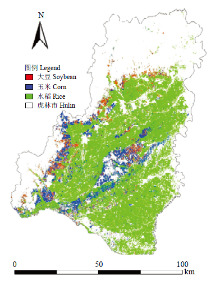 显示原图|下载原图ZIP|生成PPT
显示原图|下载原图ZIP|生成PPT图72014年虎林市农作物分类
-->Fig. 7Classification of crops in Hulin in 2014
-->
2.5 精度验证
2.5.1 土地利用分类精度验证 结合研究目的,将旱地与水田合并为耕地,利用验证样本,计算不同分类方法的混淆矩阵(表3),由表3可以看出,最大似然法分类结果较差,决策树分类法总体精度最高,为90.24%,Kappa系数为0.87。其中耕地制图精度高达95.65%。Table 3
表3
表3土地利用分类混淆矩阵结果
Table 3The results of crop classification accuracy verification
| 用户精度/制图精度 User accuracy/Mapping accuracy (%) | 总体精度/Kappa系数 Overall accuracy/Kappa coefficient (%) | |||||
|---|---|---|---|---|---|---|
| 建设用地 Building site | 林地 Woodland | 水 Water | 湿地 Wetland | 耕地 Farmland | ||
| 最大似然法 Maximum likelihood | 94.87/100.00 | 96.88/79.49 | 100.00/88.24 | 56.82/96.15 | 100.00/76.81 | 85.85/0.82 |
| 面向对象 Object-oriented | 91.18/83.78 | 86.67/100.00 | 91.43/94.12 | 94.44/65.38 | 87.67/92.75 | 89.26/0.86 |
| 决策树 Decision tree | 91.67/89.19 | 90.48/97.44 | 96.88/91.18 | 94.44/65.38 | 85.71/95.65 | 90.24/0.87 |
新窗口打开
2.5.2 作物分类精度验证 表4为以耕地作为作物分类规则,通过多种分类方法进行作物分类,得到的精度评价结果。从表4可以看出,利用6月1日、7月4日2幅影像采用最大似然法对研究区作物分类精度高达94.01%,大豆精度较低,水稻精度较高。而采用6月1日、7月4日、9月21日3幅,利用最大似然法的作物分类总体精度最高达97.13%,大豆、玉米精度明显提高。表5为未以耕地为规则直接对作物进行分类的混淆矩阵结果,总体精度为88.19%,Kappa系数为0.60。
Table 4
表4
表4以耕地作为规则的作物分类混淆矩阵结果
Table 4Results of the confusion matrix of crop classification by using farmland as a rule
| 类型 Type | 所用影像 Image | 用户精度/制图精度 User accuracy/Mapping accuracy (%) | 总体精度/Kappa系数 Overall accuracy/ Kappa coefficient (%) | ||||
|---|---|---|---|---|---|---|---|
| 大豆 Soybean | 玉米 Corn | 水稻 Rice | |||||
| 波谱角分类Spectral angle mapper | 20幅NDVI 20 NDVI | 80.80/67.23 | 55.99/75.88 | 96.35/92.46 | 89.78/0.64 | ||
| 主成分分析Principal component analysis | 主成分 Principal component | 57.46/64.76 | 61.19/88.98 | 97.98/91.68 | 90.50/0.68 | ||
| 神经网络法Neural net | 6、7月2幅 Jun. 5, Jul. 4 | 46.19/69.55 | 79.77/77.22 | 99.53/93.09 | 90.43/0.69 | ||
| 支持向量机SVM | 6、7月2幅 Jun. 5, Jul. 4 | 11.39/37.59 | 64.35/62.53 | 97.82/89.63 | 84.92/0.52 | ||
| 最小距离法Minimum distance | 6、7月2幅 Jun. 5, Jul. 4 | 11.38/37.51 | 64.18/80.48 | 97.82/95.58 | 84.90/0.52 | ||
| 马氏距离法 Mahalanobis distance | 20幅NDVI 20 NDVI | 73.93/88.69 | 80.81/88.19 | 98.21/96.58 | 95.38/0.83 | ||
| 6、7月2幅 Jun. 5, Jul. 4 | 38.95/74.53 | 78.73/80.48 | 99.31/95.58 | 93.20/0.76 | |||
| 最大似然法 Maximum likelihood | 20幅NDVI 20 NDVI | 81.21/85.98 | 80.53/92.32 | 99.05/96.93 | 96.06/0.85 | ||
| 9月1幅 Sep. 21 | 40.83/90.48 | 79.86/85.59 | 98.77/93.28 | 92.33/0.74 | |||
| 6、7月2幅 Jun. 5, Jul. 4 | 50.88/81.98 | 75.37/82.28 | 99.52/96.01 | 94.01/0.79 | |||
| 6、7、9月3幅 Jun. 5, Jul. 4, Sep. 21 | 70.04/94.19 | 89.08/93.68 | 99.67/97.69 | 97.13/0.89 | |||
新窗口打开
Table 5
表5
表5未以耕地为规则的作物分类混淆矩阵结果
Table 5Results of the crop classification confusion matrix without the rule of farmland
| 用户精度/制图精度 User accuracy/Mapping accuracy (%) | 总体精度/Kappa系数 Overall accuracy/ Kappa coefficient (%) | |||
|---|---|---|---|---|
| 大豆 Soybean | 水稻 Rice | 玉米 Corn | ||
| 最大似然法 Maximum likelihood | 51.30/46.23 | 99.60/94.50 | 28.90/70.13 | 88.19/0.60 |
新窗口打开
3 讨论
目前,运用不同分辨率、不同传感器拍摄的遥感影像结合对作物进行分类的研究逐渐成为热点。遥感影像的获取受大气条件、云污染因素等影响,无法获取长时间序列同源遥感影像。本文综合利用3种遥感数据结合,最终在7月上旬实现从土地利用分类到作物分类的全过程。刘新圣等[31]在土地覆盖分类的研究中总体精度为78.07%,李晓东等[32]在农田分类提取中应用全年遥感数据的总体精度为94%,发现决策树分类法可以自动提取影像特征,能对高维数据进行有效的处理,并且该方法运行速度快,准确度高。波谱角分类、主成分分析应用的时相较多;神经网络法和支持向量机处理数据较为耗时;最小距离分类受模式散布的影响,精度不高[33];最大似然方法具有清晰的参数解析能力、易于与先验知识融合、算法简单易于实施等优点[34]。本研究土地利用分类中所用分类方法总体精度几乎一致,只是每种地类分类精度有所差异,运用决策树分类方法在很大程度上提高了影像分类结果的精度[35],旱地与水田结合制图精度较高,湿地与建筑用地制图精度较差,应考虑结合形状信息和归一化水指数(NDWI)提高其分类精度。本文作物分类中最大似然分类总体精度较高,但大豆用户精度较低,由于只应用7月上旬的影像所含遥感信息有限,导致研究存在一定局限性,结合9月的影像可以提高大豆分类精度,实现大豆与玉米的区分。
4 结论
本文通过覆盖完整生长期的20幅遥感影像,提取3种传感器NDVI时间序列曲线,并综合20幅影像依次波段合成的方式对作物进行分类,分析遥感影像的时效性,确定作物分类关键时期及遥感时相;通过对比多种分类方法,从而实现从土地利用分类到作物分类的全过程。本文旨在应用Landsat 8-OLI(6月1日)、GF-1(7月4日)2种遥感数据且多时相结合,从而实现在7月上旬利用遥感影像对作物进行精准分类。4.1
通过20幅遥感影像提取3种传感器NDVI时间序列曲线,并利用不同时间序列遥感影像的组合进行分类精度对比,确定虎林市作物分类关键时期为7月初、7月末到8月初、9月末。4.2
选取出苗期、拔节期2个时期影像,利用决策树方法对土地利用覆被信息进行分类,其中耕地的用户精度为85.71%、制图精度95.65%,进而提取耕地范围作为规则进行农作物分类。4.3
利用耕地范围通过对比多种分类方法,确定最大似然法为最优分类方法,7月上旬可以实现对研究区作物分类,总体精度高达94.01%,提高了作物分类的时效性。采用6月1日、7月4日、9月21日3幅利用最大似然法的作物分类总体精度最高达97.13%,确定大豆、玉米分类精度的关键时期为9月。The authors have declared that no competing interests exist.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}