FDA波束的距离-角度二维特性,使其能够在保持目标跟踪的同时,更好地规避干扰、防止自身被定位,因而在电子对抗中具有良好的应用前景。2017年,唐斌教授等[8]对FDA的电子对抗性能进行了总结,指出了FDA在多径干扰抑制、有源干扰抑制等方面具有独特的优势。文献[9]分析表明,FDA在多径干扰抑制方面优势明显。文献[10-11]证明了利用FDA波束的距离依赖特性,能够对距离杂波抑制产生更好效果。许京伟等[12]利用FDA-MIMO发射-接收空间角频率的相对关系进行欺骗干扰鉴别,取得了较好效果。2015—2016年,王文钦教授等[13-15]发表了多篇关于FDA的综述性文章,对其研究现状进行了系统总结,并分析了FDA在射频隐身雷达中的应用前景。而解决雷达隐身问题,就要解决角度欺骗的实现问题。由于FDA的天线发射方向图与距离相关,天线发射方向图出现了弯曲现象,因而产生了关于虚拟辐射源的问题,以达到角度欺骗的目的[16-17]。利用天线发射方向图的弯曲现象,文献[18]研究了幅度法测向的角度欺骗,并提出了远场目标角度欺骗效果更好。
然而,在FDA实现角度欺骗的研究中,只研究了基于幅度法测向的角度欺骗方法,对于相位法却没有研究。以干涉仪为代表的相位法测向作为一种无源测向方法,具有测向隐蔽性好、方位测量准确等优点,在侦察系统中应用越来越广泛。但是,对于该系统的主动对抗还在研究,目前提出了相干干扰的主动对抗方法[19-20]。
本文提出了基于FDA对干涉仪的角度欺骗方法。首先利用模型建立法和欧拉公式法建立了FDA波束相位模型,然后从干涉仪测向原理出发,通过2种模型分析了方法的可行性,并通过仿真分析了欺骗的效果。
1 FDA波束相位模型 当采用干涉仪进行侦察时,与传统幅度方向图不同,干涉仪的基本原理的是求取天线接收到的波束的相位差达到测向的目的,因而有必要先建立FDA波束相位模型,并根据建立的模型求取FDA波束在信号空间的相位。
1.1 模型建立法 均匀线性FDA结构如图 1所示。
 |
| 图 1 均匀线性FDA结构 Fig. 1 Uniform linear FDA structure |
| 图选项 |
各阵元发射信号可表示为
 | (1) |
式中:各阵元频率fn为
 | (2) |
其中:f0、Δf和N分别为初始频率、频率增量和阵元总数。
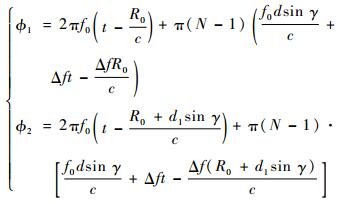
设空间中某位置{R0, θ}处有一远场点目标,则阵元数为n的发射信号到达远场点目标的信号可表示为
 | (3) |
式中:Rn=R0-ndsin θ,d为阵元间距; c为光速。
在{R0, θ}处产生的远场阵列因子为
 | (4) |
由于满足3个条件:①电磁波的远场传播时间远大于相邻阵元波程差传播时间;②远场距离远大于相邻波程差;③中心频率远大于步进频率增量。即
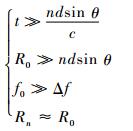 | (5) |
因此,j2πn2Δfdsin θ/c的值远小于其他3项,可以忽略不计,故
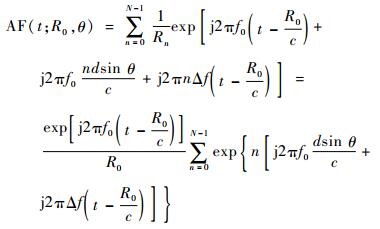 | (6) |
令

 | (7) |
则
 | (8) |
1.2 欧拉公式法 FDA阵列目标探测示意图如图 2所示。
 |
| 图 2 FDA阵列目标探测示意图 Fig. 2 Schematic of FDA array target detection |
| 图选项 |
包含N个阵元的FDA阵列对目标进行照射时,可等效为N个点源对目标进行独立探测的合成。设第i个点源在目标处的电场强度为
 | (9) |
式中:Emi和φ0i分别为信号的幅值和初始相位; ωi=2πfi。则N个点源在目标处合成的电场强度为
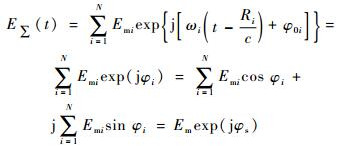 | (10) |
式中:
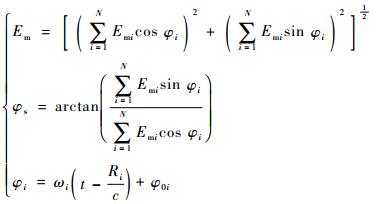 | (11) |
则
 | (12) |
2 对干涉仪的角度欺骗 通过1.1节和1.2节建立了FDA波束的相位模型,从2种模型出发,根据干涉仪测向原理,分析2种模型下对干涉仪的欺骗效果。干涉仪系统在实际测向时利用多个不同位置或指向的天线单元, 根据比较不同天线侦收到的辐射源信号的相位差确定信号的到达角。因此,由于FDA具有微小的频差,造成相位差并不符合干涉仪的测向规律,因而能够达到欺骗的目的。下面以最简单的干涉仪测向系统为例进行分析。
最简单的干涉仪测向系统是一维单基线相位干涉仪,其由2个信道组成, 如图 3所示。为了讨论方便, 假设辐射源和天线阵在一个平面内。
 |
| 图 3 一维单基线相位干涉仪系统 Fig. 3 One-dimensional single-baseline phase interferometer system |
| 图选项 |
若有一平面电磁波从天线视轴夹角γ方向到达干涉仪两接收天线, 则两天线接收到的信号相位差?为
 | (13) |
式中:λ为信号波长;d1为两天线间距。
如果2个信道完全一样, 接收机输出的信号相位差仍然为?, 经过鉴相器后, 再进行角度变换, 求得辐射源信号的到达方位γ:
 | (14) |
2.1 针对模型建立法模型 由式(8)可知:
 | (15) |
 | (16) |
利用式(13),得
 | (17) |
则接收机1求得的交点相对于阵元初始点位置即为
 | (18) |
接收机2求得的交点相对于阵元初始点位置即为
 | (19) |
式中:Xa为接收机1相对于FDA阵元初始点位置的x轴方向的距离。d一般取为λ/2,若要使交点位置落于FDA阵面外,则两接收机求得的交点均要落于阵列外,即
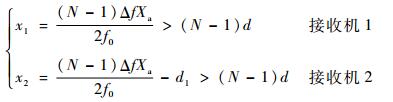 | (20) |
即
 | (21) |
2.2 针对欧拉公式法模型 根据式(11)可知:
 | (22) |
式中:
 | (23) |
其中:Ya、Za分别为接收机1到阵元初始点的y、z方向的距离。
取Δf=1 kHz,得到仿真图形如图 4所示。
 |
| 图 4 d1对Δx影响示意图(Δf=1 kHz,N=2, 5, 8) Fig. 4 Schematic of impact of d1 on Δx (Δf=1 kHz, N=2, 5, 8) |
| 图选项 |
 | (24) |
利用式(14),得
 | (25) |
则接收机求得的交点与接收机的x轴距离为
 | (26) |
若要满足角度欺骗的要求,则两接收机求得的交点均要落于阵列外,即
 | (27) |
即
 | (28) |
2.3 方法对比 2.1节、2.2节分别利用模型建立法与欧拉公式法2种方法,论证了利用FDA对干涉仪进行角度欺骗的可行性,但2种方法并不完全一致。
模型建立法建立在诸多化简条件下,考虑的是相对理想的情况,进行了很多化简,故误差会比较大。
欧拉公式法则仅考虑了干涉仪接收到的远程波束近似平行这一项理想状态,所以相对于模型建立法误差较小,与实际环境更相符。
3 仿真分析 由2.3节的分析可知,利用欧拉公式法求得的条件,相对误差较小,与实际环境更相符,故仿真采用了欧拉公式法。
3.1 干涉仪天线间距、频率增量、FDA阵元数的影响 取FDA初始频率f0为1 GHz,阵元间距d为0.15 m、时间t为0,干涉仪接收机1距离FDA阵元初始点的y轴距离Ya为0,z轴距离Za为4 km。分别取干涉仪天线间距d1、频率增量Δf、FDA阵元数N为变量进行仿真,求取
 | (29) |
取Δf=10 kHz, 得到仿真图形如图 5所示。取Δf=100 kHz, 得到仿真图形如图 6所示。由Δx=0得到满足角度欺骗的最小Xa值,即Xa临界值,如表 1所示。
 |
| 图 5 d1对Δx影响示意图(Δf=10 kHz,N=2, 5, 8) Fig. 5 Schematic of impact of d1 on Δx(Δf=10 kHz, N=2, 5, 8) |
| 图选项 |
 |
| 图 6 d1对Δx影响示意图(Δf=100 kHz,N=2, 5, 8) Fig. 6 Schematic of impact of d1 on Δx(Δf=100 kHz, N=2, 5, 8) |
| 图选项 |
表 1 不同频率增量Δf、阵元数N与干涉仪天线间距d1下的Xa临界值 Table 1 Critical value of Xa with different frequency offset Δf, array element numbers N, and interferometer antenna distances d1
| N | d1/m | Xa临界值/km | ||
| Δf=1 kHz | Δf=10 kHz | Δf=100 kHz | ||
| 2 | 0.1 | 15.539 | 6.647 | 2.000 |
| 0.15 | 16.554 | 7.151 | 2.269 | |
| 0.3 | 19.034 | 8.369 | 2.929 | |
| 5 | 0.1 | 13.715 | 5.731 | 01.476 8 |
| 0.15 | 14.052 | 5.901 | 1.609 5 | |
| 0.3 | 14.978 | 6.366 5 | 1.851 2 | |
| 8 | 0.1 | 13.414 | 05.572 5 | 01.449 7 |
| 0.15 | 13.617 5 | 5.678 5 | 1.499 5 | |
| 0.3 | 14.191 5 | 5.970 6 | 1.593 4 | |
表选项
综合比较可以得出,在一定范围内,频率增量Δf越大,阵元数N越多,干涉仪天线间距d1越小,均有利于实现FDA对干涉仪的角度欺骗,且在距离增加时,更容易实现角度欺骗,即对远场目标欺骗效果好。
3.2 干涉仪天线1距离FDA阵元初始点的z轴距离的影响 取FDA初始频率f0为1 GHz,阵元间距d为0.15 m,频率增量Δf为10 kHz,阵元数N为5,时间t为0,干涉仪天线间距d1=0.15 m,干涉仪接收机1距离FDA阵元初始点的y轴距离Ya为0,变换Za的值,求取Δx,仿真结果如图 7所示。由Δx=0得到满足角度欺骗的最小Xa值,如表 2所示。
 |
| 图 7 Za对Δx影响示意图(Δf=10 kHz, N=5) Fig. 7 Schematic of impact of Za on Δx (Δf=10 kHz, N=5) |
| 图选项 |
表 2 不同z轴距离Za下的Xa临界值 Table 2 Critical value of Xa with different z-axis distances Za
| km | |||||
| Za | 1 | 2 | 3 | 4 | 5 |
| Xa | 2.530 7 | 3.896 | 4.893 5 | 5.901 | 6.702 |
表选项
综合比较图 7和表 2可以得出,在一定范围内,Za越小,越有利于实现FDA对干涉仪的角度的欺骗,且在距离增加时,越容易实现角度欺骗,即对远场目标欺骗效果好。
3.3 FDA阵元间距的影响 取FDA初始频率f0为1 GHz,频率增量Δf为10 kHz,阵元数N为5,时间t为0,干涉仪天线间距d1为0.15 m,干涉仪接收机1距离FDA阵元初始点的y轴距离Ya为0,z轴距离Za为4 km。变换d的值,求取Δx,仿真结果如图 8所示。由Δx=0得到满足角度欺骗的最小Xa值,如表 3所示。
 |
| 图 8 d对Δx影响示意图(Δf=10 kHz, N=5) Fig. 8 Schematic of impact of d on Δx (Δf=10 kHz, N=5) |
| 图选项 |
表 3 不同FDA阵元间距d下的Xa临界值 Table 3 Critical value of Xa with different FDA array element intervals d
| d/m | 0.15 | 0.3 | 0.45 | 0.6 | 0.75 |
| Xa/km | 5.901 | 7.495 | 8.624 4 | 9.857 6 | 10.302 7 |
表选项
综合比较图 8和表 3可以得出,在一定范围内,FDA阵元间距越小,越有利于实现FDA对干涉仪的角度欺骗,且在距离增加时,越容易实现角度欺骗,即对远场目标欺骗效果好。
3.4 FDA阵元初始频率的影响 取FDA阵元间距d为0.15 m,频率增量Δf=10 kHz,阵元数N为5,时间t为0,干涉仪天线间距d1=0.15 m,干涉仪接收机1距离FDA阵元初始点的y轴距离Ya为0,z轴距离Za为4 km。变换f0的值,求取Δx,仿真结果如图 9所示。由Δx=0得到满足角度欺骗的最小Xa值,如表 4所示。
 |
| 图 9 f0对Δx影响示意图(Δf=10 kHz, N=5) Fig. 9 Schematic of impact of f0 on Δx (Δf=10 kHz, N=5) |
| 图选项 |
表 4 不同FDA初始频率f0下的Xa临界值 Table 4 Critical value of Xa with different FDA initial frequency f0
| f0/GHz | 1 | 3 | 5 | 7 | 9 |
| Xa/km | 5.901 | 9.102 | 10.980 | 12.385 | 13.515 |
表选项
综合比较图 9和表 4可以得出,在一定范围内,FDA初始频率f0越小,越有利于实现FDA对干涉仪的角度欺骗,且在距离增加时,越容易实现角度欺骗,即对远场目标欺骗效果好。
4 结论 针对干涉仪的角度欺骗问题,提出了基于FDA对干涉仪的角度欺骗方法。
1) 提出了研究FDA波束相位分布的2种模型,分别为模型建立法和欧拉公式法,比较论证了2种方法求解相位的特点。
2) 通过2种模型建立方法,分别论证了对干涉仪干扰的可行性。通过数学推导,得到了满足对干涉仪实现角度欺骗的临界情况。考虑实际情况及误差分析,确定欧拉公式法建立的模型更符合实际。
3) 利用欧拉公式法建立的模型进行仿真,考虑多方面因素对角度欺骗效果的影响,得出初始频率越小,频率增量越大,阵元数越多,FDA阵元间距越小,干涉仪天线间距越小,越有利于实现FDA对干涉仪的角度欺骗,且对远场目标欺骗效果好。
综上,FDA可以实现对干涉仪的角度欺骗,且对远场目标欺骗具有较好的效果。
参考文献
| [1] | ANTONIK P, WICKS M C, GRIFFITHS H D, et al.Multi-mission multi-mode waveform diversity[C]//Proceedings of the IEEE Conference on Radar.Piscataway, NJ: IEEE Press, 2006: 580-582. https://www.researchgate.net/publication/4242770_Multi-mission_multi-mode_waveform_diversity |
| [2] | ANTONIK P, WICKS M C, GRIFFITHS H D, et al.Range dependent beamforming[C]//Proceedings of the International Waveform Diversity and Design Conference.Piscataway, NJ: IEEE Press, 2006: 22-27. |
| [3] | ANTONIK P, WICKS M C, GRIFFITHS H D, et al.Range-dependent beamforming using element level waveform diversity[C]//Proceedings of the International Waveform Diversity and Design Conference.Piscataway, NJ: IEEE Press, 2006: 140-144. https://www.researchgate.net/publication/323949006_Range-dependent_beamforming_using_element_level_waveform_diversity |
| [4] | ANTONIK P, WICKS M C, GRIFFITHS H D, et al.Frequency diverse array radars[C]//Proceedings of the IEEE Conference on Radar.Piscataway, NJ: IEEE Press, 2006: 215-217. https://www.researchgate.net/publication/4242695_Frequency_diverse_array_radars |
| [5] | ANTONIK P.An investigation of a frequency diverse array[D].London: University College London, 2009: 3-4. |
| [6] | WICKS M C, ANTONIK P.Frequency diverse array with independent modulation of frequency, amplitude, and phase: US7319427[P].2008-01-15. |
| [7] | WICKS M C, ANTONIK P.Method and apparatus for a frequency diverse array: US 7511665 B2[P].2009-03-31. |
| [8] | ABDALLA A, ABDALLA H, TANG B, et al.Overview of frequency diverse array in radar ECCM applications[C]//2017 International Conference on Communication, Control, Computing and Electronics Engineering.Piscataway, NJ: IEEE Press, 2017: 1-9. https://www.researchgate.net/publication/314203553_Overview_of_frequency_diverse_array_in_radar_ECCM_applications |
| [9] | CAGRI C, SIMSEK D. Multipath characteristics of frequency diverse arrays over a ground plane[J]. IEEE Transactions on Antennas and Propagation, 2014, 62(7): 3567-3574. DOI:10.1109/TAP.2014.2316292 |
| [10] | BAIZENT P.Forward-looking radar clutter suppression using frequency diverse arrays[D].Dayton: Air Force Institute of Technology, 2006. |
| [11] | WU J X, WANG T, ZHANG L F, et al. Range-dependent clutter suppression for airborne sidelooking radar using MIMO technique[J]. IEEE Transactions on Aerospace and Electronic System, 2012, 48(4): 3647-3654. DOI:10.1109/TAES.2012.6324751 |
| [12] | XU J W, LIAO G S, ZHU S Q, et al. Deceptive jamming suppression with frequency diverse MIMO radar[J]. Signal Processing, 2015, 113(8): 9-17. |
| [13] | WANG W Q. Frequency diverse array antenna:New opportunities[J]. IEEE Antennas and Propagation Magazine, 2015, 57(2): 145-152. DOI:10.1109/MAP.2015.2414692 |
| [14] | WANG W Q. Overview of frequency diverse array in radar and navigation applications[J]. IET Radar, Sonar & Navigation, 2016, 10(6): 1001-1012. |
| [15] | 王文钦, 邵怀宗, 陈慧. 频控阵雷达:概念、原理与应用[J]. 电子与信息学报, 2016, 38(4): 1000-1011. WANG W Q, SHAO H Z, CHEN H. Frequency diverse array radar:Concept, principle and application[J]. Journal of Electronics & Information Technology, 2016, 38(4): 1000-1011. (in Chinese) |
| [16] | WANG W Q, CAI J Y. A technique for jamming bi-and multistatic SAR systems[J]. IEEE Geoscience and Remote Sensing Letters, 2007, 4(1): 80-82. DOI:10.1109/LGRS.2006.886036 |
| [17] | 张福丹.频率分集阵列雷达波束控制及应用研究[D].南京: 南京航空航天大学, 2012. ZHANG F D.Frequency diverse array radar beam control and application research[D].Nanjing: Nanjing University of Aeronautics and Astronautics, 2012(in Chinese). http://cdmd.cnki.com.cn/article/cdmd-10287-1014059805.htm |
| [18] | 胡祺勇, 谢军伟, 张昭建. 频率分集阵列在角度欺骗中的应用分析[J]. 空军工程大学学报, 2016, 10(6): 41-47. HU Q Y, XIE J W, ZHANG Z J. Application and analysis of frequency diverse array used in angle deception[J]. Journal of Force Engineering University, 2016, 10(6): 41-47. DOI:10.3969/j.issn.1009-3516.2016.06.008 (in Chinese) |
| [19] | 刘伟, 付永庆, 许达. 二维相位干涉仪在相干干扰下的测向误差模型[J]. 中南大学学报, 2015, 46(4): 1274-1280. LIU W, FU Y Q, XU D. Direction-finding error model of two-dimensional phase interferometer under coherent interference[J]. Journal of Central South University, 2015, 46(4): 1274-1280. (in Chinese) |
| [20] | 杨军佳, 毕大平, 张国利. 相干干扰下无源测向系统方位测量误差模型[J]. 探测与控制学报, 2012, 34(4): 75-79. YANG J J, BI D P, ZHANG G L. Error model of passive direction finding system under coherent interference[J]. Journal of Detection & Control, 2012, 34(4): 75-79. DOI:10.3969/j.issn.1008-1194.2012.04.018 (in Chinese) |
