目前,国际上很多机场已完成或正在进行GBAS开发与建设工作。德国法兰克福机场、瑞士苏黎世机场、澳大利亚悉尼机场、美国纽瓦克机场、休斯顿机场等已完成GBAS地面系统布设且已经通过运行认证,日本石垣机场、墨尔本机场等布设的GBAS地面系统正处于测试中,东京国际机场、布里斯班机场、珀斯机场、英国希斯罗机场等正在进行或计划建设GBAS[1-2]。中国已在上海浦东机场和天津滨海机场安装GBAS地面系统,中国民用航空局正在进行上述2个机场GBAS地面系统取证工作,同时计划为国内更多的机场建设GBAS[1]。
GBAS基准站的布设是GBAS建设中重要的环节,合理的基准站布设能够有效减小GBAS地面系统的差分校正误差,提高完好性监测性能[3]。随着GBAS建设向支持CAT Ⅲ发展,在GBAS进近服务类型D(GBAS Approach Service Type D,GAST D)的标准和建议措施(Standards and Recommended Practices,SARPs)提出的新要求(如电离层梯度监视性能要求)下布设将更具有挑战性[4]。目前,关于GBAS基准站布设的标准文件主要是美国联邦航空管理局(Federal Aviation Administration,FAA)于2010年发布的GBAS地面系统选址标准6884.1[5]。6884.1标准给出了GBAS地面设施选址的确定、评估和认证流程,并对GBAS基准站的布设提出了基本要求。文献[6]给出了一些在SESAR 15.03.06项目中提出的GBAS地面设施安装要求。然而,GBAS基准站的布设存在一定灵活性,对于基准站间的距离、多个基准站的几何结构等方面,6884.1标准没有给出具体要求[5]。灵活性为GBAS布设提供了更大的选择性,但同时也带来了布设方案设计与选择的困难。已完成布设的GBAS地面系统存在多种方式。例如,纽瓦克机场(IATA:EWR)、休斯顿机场(IATA:IAH)以及格兰特机场(IATA:MWH)的4个基准站分别呈折线形状、平行四边形形状以及梯形形状。如EWR、IAH和MWH等为国际航空运输协会(International Air Transport Association,IATA)制定的机场三字代码。因此,这使得未来机场在进行GBAS地面系统布设过程中难以确定基准站的布设方式。此外,不同区域的GBAS所用多星座、电离层活动情况不同,对基准站布设也会有不同的要求,而现有标准未考虑这方面的影响。因此如何布设GBAS地面站仍需进一步研究。
为此,本文开展GBAS基准站布设方式的要求及影响因素的研究,为机场设计和确定GBAS基准站布设方案提供依据与建议。
1 典型GBAS基准站布设分析 在研究基准站布设的具体参数,包括基准站数目、基线距离等对GBAS性能的影响之前,本文首先通过分析采集的5个典型机场的GBAS电文数据,来验证不同的布设是否会具有不同的性能。
美国FAA在5个已建设GBAS的典型机场,即EWR、IAH、MWH、里约热内卢国际机场(IATA:GIG)以及大西洋城国际机场(IATA:ACY),共搭建了6个GBAS性能监测站[7]。FAA官网(http://laas.tc.faa.gov)每分钟实时更新各个机场的GBAS电文数据。本节利用下载的GBAS电文数据分析比较5个机场地面性能,分析GBAS基准站布设方式的不同是否会影响GBAS地面性能。
1.1 基准站布设对比 从机场周围环境、基准站数目、基准站布设几何结构、基线长度等角度比较分析上述5个机场GBAS基准站布设情况。
图 1左列是机场以GBAS参考点为中心周围约2 km范围内的地形图,图中用红色星号标注GBAS参考点;图 1右列是GBAS基准站布设方式,图中蓝圈表示基准站,站间标注的数字表示站间距离,即基线长度。
 |
| 图 1 5个机场地形情况及基准站布设 Fig. 1 Terrain and reference station layouts of five airports |
| 图选项 |
利用地形数据计算GBAS参考点周围地形对参考点的遮蔽角,发现在最小遮蔽角设为5°的条件下,周围地形不会遮蔽机场可见星。此外,EWR、IAH、MWH和GIG布设有4个基准站,EWR的呈接近直线的折线,MWH与GIG的接近梯形,IAH的接近菱形;ACY布设有6个基准站,但是其中2个站在GAST C运行模式下不启用[7],4个主要基准站接近梯形。
1.2 伪距校正误差标准差包络对比 GBAS广播电文中的σpr_gnd是伪距改正数误差包络,与基准站接收机性能、卫星仰角等相关,可以表征GBAS地面站精度性能[8]。因此,本文利用5个机场GBAS广播电文中的σpr_gnd分析比较不同GBAS地面站布设的精度性能。
图 2是播发σpr_gnd比较结果,θ为仰角(不限制测距源)。可以看出,EWR的GBAS地面系统精度性能比ACY稍差,GIG、IAH和MWH相差不大,比EWR和ACY稍好。
 |
| 图 2 5个机场播发的σpr_gnd Fig. 2 Broadcast σpr_gnd of five airports |
| 图选项 |
1.3 综合分析 结果表明,5个机场周围地形环境均不会造成可见星遮蔽;此外,由GBAS类型2电文可知,5个机场基准站所用GBAS接收机的地面精度等级均为C。因此,造成机场GBAS地面系统精度性能不同的主要原因,可能是GBAS基准站布设方式的不同。进一步地,推测EWR机场整体折线形的基准站布设方式,与其他机场四边形的布设方式得到的GBAS地面系统精度性能相比较差。
根据FAA 6884.1标准[5]的规定,基准站接收机天线之间最小距离要求是100 m,考虑到基准站之间多径效应、干扰等影响,应该适当增大基准站间距,同时,任意3个基准站不能共线[5]。EWR 4个基准站间距比GIG、IAH和MWH小,刚刚超过100 m,虽然ACY基线中有一个为94.1 m,其余基线均比EWR长;此外,虽然EWR 4个基准站布设满足了不共线的要求,但是接近于直线的折线形分布可能影响精度性能。因此,在机场环境允许的情况下,建议不要将基准站布设成接近直线的折线形。
2 GBAS基准站布设要求分析 第1节基于采集数据的分析已推测不同GBAS基准站布设方式下GBAS精度性能会不同,则在布设GBAS地面系统过程中需要考虑如何能够使得GBAS精度性能更好。除了精度,完好性、可用性和连续性也可能会受到GBAS基准站布设方式的影响,则在基准站布设的具体参数设置过程中需要考虑各性能的要求。通过分析布设参数,包括基准站个数、基线长度对GBAS性能的影响,从而反向分析不同性能要求下应如何设置布设参数,为设计和选择GBAS基准站布设方法提供参考依据。
2.1 基准站个数 根据GBAS差分定位原理,至少需要2个基准站。目前,大多机场GBAS地面系统布设有3或4个基准站,ACY布设有6个基准站,其中2个是备用基准站,在GAST D模式中当其他基准站发生故障时启用[7]。本节利用理论和仿真分析不同基准站个数对GBAS性能的影响。
2.1.1 理论分析 保护级计算方法如文献[9]中所述,其中无故障漏检率乘积因子Kffmd和漏检率乘积因子Kmd,以及伪距误差标准差均与基准站数目相关。
Kffmd和Kmd在不同基准站数目下的取值如表 1所示,其中基准站数目为5和6下的取值是按照DO-245A附录D[10]中的方法计算得到的。可以看出,随着基准站数目增大,Kffmd取值增大,Kmd取值减小,且两者增大或减小的幅度逐渐减小。
表 1 不同基准站数目下Kffmd和Kmd取值 Table 1 Values of Kffmd and Kmd for different numbers of reference stations
| 乘积因子 | 基准站数目 | ||||
| 2 | 3 | 4 | 5 | 6 | |
| Kffmd | 5.762 | 5.810 | 5.847 | 5.877 | 5.903 |
| Kmd | 2.935 | 2.898 | 2.878 | 2.865 | 2.856 |
表选项
H0和H1假设下的伪距误差标准差σi和σi, H1的计算公式如下:
 | (1) |
 | (2) |
式中:Mi为用于计算第i个测距源伪距校正值的基准站数目;σtropo, i为修正后对流层残差不确定度;σiono, i为修正后电离层残差不确定度;σpr_air, i为无故障机载误差项;σpr_gnd, i为GBAS差分修正值的无故障误差,计算公式为
 | (3) |
式中:M为伪距校正值的基准站数目;θi为第i颗可见卫星对GBAS参考站的仰角;a0、a1、θ0和a2定义见DO-245A的表3-1[10]。则保持其他条件不变的情况下,随着Mi增大,σi和σi, H1均减小。
2.1.2 仿真结果与分析 综上,M的不同对Kffmd、Kmd、σi和σi, H1取值的影响会造成保护级的不同。分别仿真GAST C与GAST D下不同基准站数目对保护级的影响,以垂向保护级(Vertical Protection Level,VPL)为例。仿真工具为MATLAB,仿真条件如下:
1) 星座:GPS当前星座,利用北美空防司令部提供的Yuma历书;
2) 地点:林芝机场(E94.3°,N29.3°,2949m)[11];
3) 遮蔽角:5°;
4) 飞机高度:30 m(GAST D)和60 m(GAST C);
5) 飞机速度:72 m/s(GAST D)和77 m/s(GAST C);
6) 电离层倾斜梯度:4 mm/km;
7) 折射率不确定度:34;
8) 对流层归一化高度:7 600 m;
9) 地面精度等级:C(GAST D)和B(GAST C);
10) 机载精度等级:B。
仿真结果如图 3所示。随着基准站数目的增大,VPL减小的百分比统计结果如表 2所示。可以看出,基准站数目的增多会提高GBAS性能,但是,性能的提升量也会逐渐变小,当基准站数目达到4个后,继续增加基准站对系统性能几乎不会有影响,对于GAST C,上述现象尤其显著。
 |
| 图 3 不同基准站数目下的VPL Fig. 3 VPL for different numbers of reference stations |
| 图选项 |
表 2 VPL随基准站数目增大而减小的百分比统计 Table 2 Decreasing VPL percentage as number of reference stations increases
| M | VPL减小百分比 | |
| GAST C | GAST D | |
| 2 →3 | 42.66 | 16.88 |
| 3 →4 | 8.70 | 1.51 |
| 4 →5 | 2.66 | 0.83 |
| 5 →6 | 1.78 | 0.49 |
表选项
有初步研究表明4个基准站能够满足GAST D要求,且当接收机数目降至3个时,系统仍然可能运行[6]。除了系统性能,增加基准站数目需要考虑多方面的影响,如GBAS地面系统布设成本的增加、VDB传输定义的限制、处理器计算代价的增加等。综合考虑系统性能的要求以及代价,将基准站数目设为4是较好的选择。
从上述结果可以看出,当基准站数目从4个减小到3个甚至2个时系统性能会有较大的降低。结合典型机场监测站数据,以GIG为例,在一个月的采集数据中,某个接收机的B值大约有44 h取值为-6.4,根据DO-246D[12]中的规定可知,此种情况下该接收机不可用。比较此段时间与4个站都能用时的系统性能,如图 4所示,与一个B值异常不可用的情况相比,4个B值均可用时的σpr_gnd值稍低。因此,建议增设备用基准站,当GBAS运行中切换基准接收机在技术上可行且认证运行时,可以供正在使用的基准站出现故障时启用。在备用基准接收机与故障接收机切换完成后,能够保证仍是有4个基准站处于可用的状态。
 |
| 图 4 GIG B值异常与正常时间下σpr_gnd比较 Fig. 4 Comparison of σpr_gnd values of GIG B-valuebetween fault-occurrence time and normal time |
| 图选项 |
2.2 基线长度 星历故障监视和异常电离层梯度监视均是GBAS完好性监视中的一部分,利用距离为百米量级的GBAS基准站来监视故障,其监视性能与GBAS基准站布设方式相关。则在设计GBAS基准站布设方案时需要考虑星历故障监视和异常电离层梯度监视方面的性能需求。根据文献[6, 13]所述,星历故障监视和异常电离层梯度监视的性能与基线长度相关。因此,本节研究基线长度对这2个监视的影响以及如何设置基线长度。
2.2.1 基线长度对星历故障监视的影响 星历故障一般分为A、B两类,A类是指某颗卫星发生机动后广播星历出现错误,进一步根据GBAS地面设备是否知道卫星机动的发生分为A1和A2;B类是指没有卫星机动发生的情况下,广播的星历数据出现错误[14]。B类故障利用YE-TE方法监视,即将利用历史已验证无故障的星历和当前接收的星历分别得到的卫星定位结果进行比较,从而分析当前星历是否出现错误,其算法不受GBAS地面站布设方式的影响。
对于A类故障,由于卫星发生机动,已验证的历史星历对于当前星历的验证没有意义,而是需要利用当前接收的观测量来进行监视[14]。文献[15]提出一种基于接收机基线长度估计的监视算法,下面具体介绍算法基本原理。
首先,利用卫星i广播星历和GBAS基准天线位置计算由基准天线向卫星的单位视线向量,再利用误差校正后的伪距观测值计算2个天线间的基线长度为
 | (4) |
式中:

 |
| 图 5 2个基准天线与卫星的几何关系 Fig. 5 Geometric relationship between two reference antennas and a satellite |
| 图选项 |
然后,将基线长度估计值与精确测量的实际基线长度做差,得到检验统计量(Test Statistics,TS)
 | (5) |
式中:||xAB||为精确基线长度。
笔者假设无故障条件下检验统计量是服从零均值高斯分布的,且标准差σTS(i)与卫星仰角相关。根据GBAS不同服务等级对应的完好性风险、可用性要求以及设定的星历故障出现的先验概率,确定无故障误警率乘积因子Kffa和星历故障下漏检率的乘积因子Kmd,从而确定检验阈值:
 | (6) |
若卫星i发生机动,如图 6所示,定义eA(i), f、eB(i), f分别为基准天线A、B向错误卫星位置的单位视线向量,δR(i)为卫星i的位置误差向量,则有如下关系:
 | (7) |
 | (8) |
 |
| 图 6 星历故障条件下天线与卫星的几何关系 Fig. 6 Geometric relationship between antenna and satellite under an ephemeris fault |
| 图选项 |
式中:e(i)为天线到卫星i的单位视线向量;ρ(i)为天线到卫星i的距离。
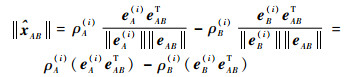
从而可将检验统计量表示为
 | (9) |
利用柯西施瓦兹不等式,可得在最差几何条件下有如下关系:
 | (10) |
式中:EAB(i)=(eA(i))TeA(i)-(eB(i))TeB(i)。
结合检验阈值,可确定卫星i的最小可检测误差(Minimum Detectable Error,MDE)和星历去相关参数P值分别为
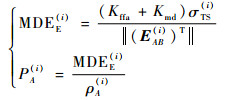 | (11) |
式中:σTS(i)需要利用机场GBAS基准站长时间的观测数据统计得到;MDEE(i)的下标E表示该MDE属于星历故障监视。
基于上述算法过程,利用GPS当前星座的历书和EWR机场GBAS参考点位置(W74.163°,N40.692°, 2.7 m)进行仿真,仿真中σTS(i)为文献[15]中利用韩国基站的观测数据拟合得到的,可能与其他机场实际情况有差异,但是可以利用它来仿真分析此监视算法中MDE值的变化规律。在给定可用性为99.9%时,无故障误警率为10-4,Kffa为3.89[16];GAST D下,将星历故障分配的完好性风险设为8.33×10-12,卫星故障先验概率设为1.4×10-7,得到漏检率为6×10-5,从而Kmd为3.846 1[17]。
结果表明,随着基线长度和仰角的增大,MDEE呈减小的趋势,如图 7所示。当基线长度超过400 m时,所有仰角区间对应的MDEE均不超过3 000 m[13]。因此,仿真条件下认为此监视所需的有效基线长度至少为400 m。如果由于机场场地限制,有效基线长度无法达到400 m,可对低仰角卫星采用文献[3]中提出的基于观测值和轨道拟合的星历故障监视方法,此方法需要长时间的卫星观测值且实现复杂,但是在基线长度为200 m以上时能满足要求。查看图 7可知,基线长度200 m时,19°以上仰角对应的MDEE值不超过3 000 m,则上述低仰角卫星可为仰角19°以下的卫星。因此,机场场地有限的情况下,可要求有效基线长度至少为200 m。
 |
| 图 7 MDEE与基线长度和卫星仰角的关系 Fig. 7 MDEE as a function of baseline length and satellite elevation |
| 图选项 |
需要注意的是如果基准站构成的实际基线与GBAS提供服务的跑道有一定夹角β,如图 8所示,则有效基线为实际基线在跑道方向上的投影。
 |
| 图 8 有效基线与跑道方向的关系 Fig. 8 Relationship between effective baseline and runway direction |
| 图选项 |
2.2.2 基线长度对异常电离层梯度监视的影响 正常电离层活动下,由于电离层空间和时间的相关性引入的电离层延迟伪距修正残差较小,可以由GBAS地面站播发的电离层梯度参数计算的误差估计值包络。然而,在2000年4月的电离层风暴期间,美国广域增强系统和连续运行参考站均检测到40~100 km基线范围上高达425 mm/km的倾斜电离层延迟梯度,此梯度在很差的用户卫星几何结构和进近几何条件下可能造成GBAS用户垂直定位误差达到甚至超过20 m[18]。因此,GBAS地面站需要监视异常电离层梯度,并对受到异常电离层梯度影响的卫星观测量进行标记和剔除。
目前,对于异常电离层梯度的检测有多种方法,例如,码载分歧监视、基于三差载波相位观测值的监视方法、基于双差载波相位观测值的监视方法和基于单频载波相位和码测量值的监视方法等,前两者需要一段时间的观测数据,无法用于监视刚捕获的卫星,后两者可以监视刚捕获的卫星,但其监视性能与GBAS基准站布设相关[16]。本节针对基于双差载波相位观测值的监视方法研究GBAS基准站布设对异常电离层梯度监视的影响。
由2个基准天线组成的基线xb上的单差载波相位观测量为
 | (12) |
式中:e为基准天线与卫星的视线向量;Δτ为差分接收机钟差;λ为卫星信号载波波长;Δn为单差整周模糊度;α为倾斜电离层梯度;εΔ?为单差载波相位观测噪声。
正常电离层活动条件下,如果基线长度小于1 km,则误差项α|xb|为毫米量级,与异常电离层梯度条件下的值相比可以忽略。因此,假设仅有一颗卫星的观测量受到异常电离层的影响[19],将其与未受影响卫星的单差载波相位进行双差,得到如下双差载波相位观测量:
 | (13) |
式中:αe为异常倾斜电离层梯度; εΔ2?为双差载波相位观测噪声。卫星视线向量和基线向量已知,且整周模糊度必为整数,则在电离层梯度误差项不是载波波长的整数倍的条件下的检测统计量为
 | (14) |
假设载波相位观测噪声由零均值标准差σ?的高斯分布包络,则认为εΔ2?为零均值高斯分布,且标准差为σΔ2?=2σ?[16]。有初步测试认为σΔ2?可设为5 mm。但是,文献[6]认为5 mm有些乐观,没有完全考虑到机场环境影响,因此,将其设置为文献[20]中提出的6 mm。
在给定无故障误警率和漏检率下,计算相应的Kffa与Kmd,从而计算检测阈值:
 | (15) |
式中:MDEI中下标I表示该MDE属于电离层异常监视。在给定可用性为99.9%时,无故障误警率为10-4,相应的Kffa为3.89[16];在给定完好性风险为10-9且假定电离层异常出现的先验概率为10-5时,漏检率为10-4,相应的Kmd为3.72[6]。
若电离层梯度误差项大于载波波长,则其波长整数倍的部分将被作为整周模糊度从检验统计量中去除,使得检验统计量仅包含小于载波波长的剩余电离层梯度误差项和双差观测噪声项。则在给定基线长度下,可检测的倾斜电离层梯度范围如下:
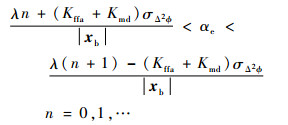 | (16) |
若基线与跑道夹角为θ,则有效基线长度为|xb|cos θ,将其代入式(16)可得有效可检测异常电离层梯度范围。
基于上述算法和给定参数条件,可得图 9。结果表明,不同基线长度有不同的可监测范围,根据所需监测的电离层梯度范围,可以确定要求的基线长度或基线长度的组合。考虑星历故障监视的要求,图中分别用红线和绿线标出200 m和400 m基线,黄色表示可检测,白色表示不可检测。
 |
| 图 9 可检测电离层梯度范围与基线长度关系 Fig. 9 Relationship between detectable ionospheric slant gradient range and baseline length |
| 图选项 |
文献[21]表明仅当电离层梯度超过300 mm/km且未被GBAS地面站监测到时,其会对GBAS用户造成威胁,因此,对于GAST D,目前的SARPs要求地面系统能够检测到300 mm/km以上的异常电离层梯度。此外,美国本土(Conterminous United States,CONUS)电离层威胁模型中斜坡梯度最大值为425 mm/km[22]。然而,CONUS模型是针对CONUS中纬度地区建立的,不同地理位置的电离层活动变化显著,相应的异常电离层梯度也有很大区别,赤道地区可能会出现更大的电离层梯度[23]。可以根据机场当地电离层梯度监测结果确定αe范围,从而结合星历故障监视的要求,得到相应的基线要求。
3 GBAS基准站布设策略及示例分析 3.1 GBAS基准站布设基本策略 基于第2节分析,对于一个给定机场,根据机场中GBAS提供服务的跑道、GBAS服务等级要求、所用星座情况以及当地电离层活动情况等设计GBAS基准站布设可行方案。
1) 基准站个数
DO-253C建议布设2~6个基准站[9],结合上述分析,将布设的基准站数目暂定为4个。若机场环境允许,则可适当增设备用基准站,备用基准站位置的确定参考主用基准站布设方法。
2) 基线方向
条件允许的情况下,应尽量使实际基线沿GBAS提供服务的跑道方向,故根据机场跑道的方向暂定基线方向,如图 10示例中分别平行于2条跑道的虚线。
 |
| 图 10 GBAS基准站布设方案示例A和B Fig. 10 Sample GBAS reference station layout schemes A and B |
| 图选项 |
3) 基准站几何结构
根据5个机场采集数据的分析,不建议选择接近直线的折线形布设方案。
4) 基线长度
首先,基线长度必须满足6 884.1标准中规定的最小间距100 m[3]。然后,根据GAST C或GAST D等不同服务等级相应的完好性风险要求、GBAS所用GNSS星座星历故障发生概率、机场实际观测统计结果、所需监测的异常电离层梯度范围等分别确定满足星历故障监视和电离层梯度监视所需的基线长度范围。
除了上述详细分析的几项,GBAS基准站布设中还需要考虑以下2点。
1) 参考天线与接收机布设方式
参考天线与接收机有集中式和分离式2种布设方式。集中式布设,即参考接收机直接放置在参考天线的基座上,接收机再通过数据传输线将接收的数据传送至位于主设备机房内的GBAS处理器;分离式布设,即将参考接收机放置在主设备机房或距离参考天线一定距离的遮蔽所内[5],利用射频同轴电缆与相应的参考天线相连[24]。
目前,GBAS基准站的参考接收机与天线大多为集中式布设,此种布设方式无需考虑信号从天线向接收机传输过程中的损耗,但是,参考接收机的维护较为困难,且安全性较低,如对于军用GBAS,集中式布设可能难于保证接收机中保密芯片的安全性。分离式布设则安全性较高且维护方便,但是,由于射频信号在传输过程中比数字信号更易损耗,分离式布设需要考虑射频信号从天线传输至接收机的过程中的损耗是否能够达到接收机要求,从而确定天线与接收机分离的最大允许距离。2种方式的选择、分离距离的确定等需要考虑机场实际情况、GNSS天线与接收机规格、传输电缆规格等,受篇幅限制,本文不做具体分析。
2) 其他因素
GBAS地面站布设还必须考虑机场建筑物、跑道、滑行道、植被等的多径效应、信号射频干扰等对参考天线的影响等[25]。这些因素对GBAS站址布设的基本要求可参考6884.1[5]。在此基本要求下,适用于不同机场的具体要求需要利用机场环境、机场实地测试等得到,受篇幅限制,本文不做具体分析。
3.2 布设方案示例 机场跑道布设一般有4种方式:单跑道、平行跑道、开放Ⅴ型跑道以及交叉跑道[6]。后2种方式都为Ⅴ型跑道。EWR、IAH等5个机场为Ⅴ型跑道、Ⅴ型跑道与单跑道结合,或者Ⅴ型跑道与平行跑道结合,且Ⅴ型跑道的夹角在50°~72°之间,因此,本节以50°夹角的Ⅴ型跑道为例。
假设机场有如下布设的Ⅴ型跑道,则暂定基线方向如图 10和图 11中虚线所示;根据前面的分析和给定条件,星历故障监视所需有效基线长度为400 m;假设所需监测的电离层梯度范围是300~1 000 mm/km,则有效基线长度可设置为400 m与144 m组合(查图 9可得)。需要注意的是,不需要每条基线均满足有效基线长度的要求,只要4个站整体满足要求即可。根据上述要求可得到多种基准站布设方案,2种可能的方案示意图如图 10所示, 图中天线为基准接收机的天线。
 |
| 图 11 机场限制下GBAS基准站布设方案示例C和D Fig. 11 Sample GBAS reference station layout schemes C and D under limited airport conditions |
| 图选项 |
机场场地限制下,星历故障监视所需有效基线长度至少为200 m,则对于所需监测的电离层梯度范围为300~1 000 mm/km,有效基线长度可设置为200 m与122 m组合。2种可能的方案示意图如图 11所示。
3.3 布设方案评估 在多个满足要求的基准站布设方案中,需要根据需求选择出更优的方案。为此,本文制定一种方案评估方法,该方法目前仅考虑星历故障监视和异常电离层梯度监视。对于多个跑道方向,先针对每个方向对方案进行评估,再综合各个方向的结果。对于对称的Ⅴ型跑道,仅考虑一个跑道方向即可,则对于上述方案示例,以跑道1方向为例,对4种方案进行评估。
首先,计算4个基准站组成的6条基线在跑道1方向上的有效基线长度,求得相应的星历故障监视MDE值(以25°仰角为例)以及可监测电离层梯度范围(2 000 mm/km以下[16, 26]),如表 3和图 12所示,表中lij表示基准接收机i和j之间的基线。
表 3 4种方案6条基线有效长度以及MDEE值 Table 3 Effective lengths and ephemeris monitor MDEE of six baselines in four schemes
| m | |||||||
| 方案 | 参数 | l12 | l13 | l14 | l23 | l24 | l34 |
| A | 有效长度 | 256 | 400 | 164.55 | 144 | 91.45 | 235.45 |
| MDEE | 1754 | 1123 | 2730 | 3120 | 4915 | 1907 | |
| B | 有效长度 | 400 | 544 | 257.12 | 144 | 142.88 | 286.88 |
| MDEE | 1123 | 826 | 1747 | 3120 | 3144 | 1566 | |
| C | 有效长度 | 122 | 200 | 78.42 | 78 | 43.58 | 121.58 |
| MDEE | 3683 | 2247 | 5750 | 5782 | 10404 | 3697 | |
| D | 有效长度 | 200 | 322 | 128.56 | 122 | 71.44 | 193.44 |
| MDEE | 2247 | 1395 | 3499 | 3683 | 6290 | 2322 | |
表选项
 |
| 图 12 4种方案可监测电离层梯度范围 Fig. 12 Detectable ionospheric slant gradient ranges of four schemes |
| 图选项 |
然后,比较4种方案的MDE统计特性及电离层梯度监视范围,如表 4所示。可以看出,星历故障监视性能B > A > D > C;电离层梯度监视就监测范围而言,A > D > C > B,就最小可监测梯度而言,B < A < D < C;若考虑机场占地面积,B > A > D > C。
表 4 星历MDEE、电离层梯度监视范围统计结果 Table 4 Statistics of ephemeris monitor MDEE and detectable ionospheric slant gradient ranges
| 方案 | MDEE | 电离层梯度监视 | |||||
| 极大值/m | 极小值/m | 均值/ m | MDEE < 3000m占比/% | 范围/(mm·km-1) | 范围在[0, 2000]mm/ km占比/% | ||
| A | 4 915 | 1123 | 2592 | 66.67 | [114.2, 2000] | 94.29 | |
| B | 3144 | 826 | 1921 | 66.67 | [83.93, 1311]∪[1484, 2000] | 87.15 | |
| C | 10404 | 2247 | 5261 | 16.7 | [228.3, 2000] | 88.59 | |
| D | 6290 | 1395 | 3239 | 50 | [141.8, 2000] | 92.91 | |
表选项
最后,根据机场实际情况、GBAS监视实际需求权衡每种方案的特点,选择合适的方案。例如,对于异常电离层梯度监视,以中国低纬度地区的广东省为例,文献[27]基于广东省65个参考站的实测数据,观测到128 mm/km的异常电离层梯度。根据表 4所列4种方案的电离层梯度监视范围,可以看到方案A和B包含128 mm/km。因此,如果根据广东省异常电离层梯度情况,要求GBAS异常电离层梯度监视能够监视128 mm/km以上的梯度,可以选择方案A和B。
4 结论 通过利用采集数据从多个角度比较分析5个机场典型GBAS基准站布设情况,以及结合理论与仿真分析基准站个数与基线长度对GBAS性能的影响,提出一种GBAS基准站布设方法设计和评估策略,该策略考虑以下几点:
1) 较小的基线长度和接近于直线的折线形分布可能造成较差的GBAS地面精度性能,建议基线长度大于100 m,且呈四边形布设。
2) 随着基准站个数从2个增至6个,GAST C和GAST D的垂向保护级均逐渐减小,但减小百分比也逐渐降低,GAST C的从42.66%降至1.78%,GAST D从16.88%降至0.49%。同时考虑VDB传输限制,将主用基准站个数定为4个较为合适。
3) 基于所述星历故障监视、电离层梯度监视方法、仿真条件与性能需求,机场场地足够的情况下,400 m与不超过144 m的有效基线组合可满足要求;若机场场地受限,结合复杂耗时的星历故障监视方法,200 m与不超过122 m的有效基线组合可满足要求。
根据完好性监视要求和机场条件可能能够得到多种可行方案,此时按照评估方法选取最合适的方案。
本文提出的策略可以为GBAS基准站布设方法的设计和选择提供参考。若有足够机场相关数据支持,未来工作可深入研究机场多径效应、射频干扰等对GBAS基准站布设的具体要求。此外,可进一步研究当机场实际环境无法提供足够的场地进行选定GBAS基准站布设方案的布设时,应该如何调整布设方案。
参考文献
| [1] | International GBAS Working Group (IGWG).GBAS approach & landing systems, the future of precision approach[EB/OL].(2017-04-20)[2018-01-10]. http://flygls.net/. |
| [2] | ICAO NSP.Report of the meeting of the GBAS WG (GWG): NSP3 Agenda 1[R].Montreal: ICAO, 2016. |
| [3] | GRATTON L R.Orbit ephemeris monitors for category Ⅰ local area augmentation of GPS[D].Chicago: Illinois Institute of Technology, 2003. |
| [4] | ICAO NSP/4-WP/18.Proposed change to ICAO DOC 9157 Part 6 to facilitate GBAS ground subsystem siting: NSP4 Agenda 3[R].Montreal: ICAO, 2017. |
| [5] | FAA.Siting criteria for ground based augmentation system (GBAS): 6884.1[S].Washington, D.C.: FAA, 2010. |
| [6] | SESAR.Ground architecture and airport installation: D0403.00.00[R].Ragusa: SESAR, 2013. |
| [7] | FAA.Ground based augmentation system performance analysis and activities report: Quarter 1-2016[R].Washington, D.C.: FAA, 2016. |
| [8] | DAUTERMANN T, FELUX M, GROSCH A. Approach service type D evaluation of the DLR GBAS testbed[J]. GPS Solutions, 2012, 16(3): 375-387. DOI:10.1007/s10291-011-0239-3 |
| [9] | RTCA.Minimum operational performance standards for GPS local area augmentation system airborne equipment: DO-253C[S].Washington, D.C.: RTCA, 2008. |
| [10] | RTCA.Minimum aviation system performance standards for the local area augmentation system(LAAS): DO-245A[S].Washington, D.C.: RTCA, 2004. |
| [11] | WANG Z, MACABIAU C, ZHANG J, et al. Prediction and analysis of GBAS integrity monitoring availability at LinZhi airport[J]. GPS Solutions, 2014, 18(1): 27-40. DOI:10.1007/s10291-012-0306-4 |
| [12] | RTCA.GNSS-based precision approach local area augmentation system (LAAS) signal-in-space interface control document (ICD): DO-246D[S].Washington, D.C.: RTCA, 2008. |
| [13] | PERVAN B, GRATTON L. Orbit ephemeris monitors for local area differential GPS[J]. IEEE Transactions on Aerospace & Electronic Systems, 2005, 41(2): 449-460. |
| [14] | ICAO NSP.Preliminary review of proposed amendments to Annex 10, Volume Ⅰ: Item No.20403[R].Montreal: ICAO, 2017. |
| [15] | AHN J, LEE Y J, WON D H, et al. Orbit ephemeris failure detection in a GNSS regional application[J]. International Journal of Aeronautical & Space Sciences, 2015, 16(1): 89-101. |
| [16] | KHANAFSEH S, PULLEN S, WARBURTON J. Carrier phase ionospheric gradient ground monitor for GBAS with experimental validation[J]. Navigation, 2012, 59(1): 51-60. DOI:10.1002/navi.v59.1 |
| [17] | SHIVELY C A.Preliminary analysis of requirements for CAT ⅢB LAAS[C]//Proceedings of Annual Meeting of the Institute of Navigation.Albuquerque, NM: ION, 2001: 705-714. |
| [18] | PULLEN S, PARK Y S, ENGE P. Impact and mitigation of ionospheric anomalies on ground-based augmentation of GNSS[J]. Radio Science, 2016, 44(1): 1-10. |
| [19] | LUO M, PULLEN S, WALTER T, et al.Ionosphere spatial gradient threat for LAAS: Mitigation and tolerable threat space[C]//Proceedings of the National Technical Meeting of the Institute of Navigation.San Diego, CA: ION, 2004: 490-501. |
| [20] | ICAO NSP.GAST D siting issues paper: WP/34 Agenda 1[R].Montreal: ICAO, 2010. |
| [21] | HARRIS M, MURPHY T, SAITO S.Further validation of GAST D ionospheric anomaly mitigations[C]//Proceedings of the International Technical Meeting of the Institute of Navigation.Manassas, VA: ION, 2011, 8034(6): 942-949. |
| [22] | DATTA-BARUA S, LEE J, PULLEN S, et al. Ionospheric threat parameterization for local area GPS-based aircraft landing systems[J]. Journal of Aircraft, 2010, 47(7): 1141-1151. |
| [23] | KIM M, CHOI Y, JUN H S, et al. GBAS ionospheric threat model assessment for category Ⅰ operation in the Korean region[J]. GPS Solutions, 2015, 19(3): 443-456. DOI:10.1007/s10291-014-0404-6 |
| [24] | ICAO NSP/3.GBAS MC/DF verification exercises preliminary results: IP/14 Agenda 3[R].Montreal: ICAO, 2016. |
| [25] | ICAO NSP/3.Assessment of GNSS repeater impact on GBAS: WP/17 Agenda 3[R].Montreal: ICAO, 2016. |
| [26] | BELABBAS B, REMI P, MEURER M, et al.Absolute slant ionosphere gradient monitor for GAST-D: Issues and opportunities[C]//Proceedings of the International Technical Meeting of The Satellite Division of the Institute of Navigation.Manassas, VA: ION, 2011: 2993-3002. |
| [27] | WANG Z, WANG S, ZHU Y, et al. Assessment of ionospheric gradient impacts on ground-based augmentation system (GBAS) data in Guangdong province, China[J]. Sensors, 2017, 17(10): 2313. DOI:10.3390/s17102313 |
