用于导弹作战效能评估的手段很多[5-7],如ADC方法、系统效能评估方法(SEA)、信息熵评估方法等,但这些方法均未考虑到导弹编队作战时导弹成员之间的相互影响,以及导弹编队协同制导控制技术所带来的综合作战效能的提升。
本文基于层次分析法和美国工业武器系统效能咨询委员会(WSEIAC)的ADC模型,引入协同制导与控制能力等级(CGCL),建立了适用于导弹自主编队协同制导控制系统的综合作战效能分析模型,重点分析了导弹自主编队综合作战效能评估的各层能力和指标体系,以某反舰导弹的攻防对抗作为典型作战想定,研究了导弹编队成员的协同突防概率、交班成功率、命中概率和毁伤概率。建立的综合作战效能评估模型充分考虑了导弹自主编队的功能和特点,并在搭建的导弹自主编队攻防对抗综合仿真验证系统上多次仿真和验证了提出的导弹自主编队综合作战效能评估方法的有效性。
1 导弹自主编队综合作战效能体系结构 ADC模型综合考虑了作战系统的有效性、可靠性和作战能力,将系统的效能评定和具体的作战任务综合起来,能够反映既定任务的完成情况。由WSEIAC给出的系统效能表达式为
 | (1) |
式中:E为效能值;A为可用性行向量;D为可信性矩阵;C为能力向量[8]。
飞航导弹(MW)自主编队的协同思想主要体现在编队支撑网络、信息获取系统、编队决策与管理系统、编队飞行控制系统及成员飞行控制系统等的高度集成[1]。因而,导弹自主编队综合作战的效能评估是将导弹编队作为评估对象,可用性、可信性和能力3大要素都要经过修正和扩展,同时还要引入协同制导与控制能力系数和导弹自主编队综合作战效费比。
导弹自主编队综合作战效能体系结构如图 1所示。
 |
| 图 1 导弹自主编队综合作战效能体系结构 Fig. 1 Comprehensive operational effectiveness system structure of missile autonomous formation |
| 图选项 |
2 导弹自主编队综合作战效能分析模型 考虑到导弹编队的效费比的影响因素,在WSEIAC的系统效能表达式基础上,给出针对飞航导弹编队的综合作战效能指标公式为[1]
 | (2) |
式中:Σ为导弹编队的费用比率之和;n为导弹编队中导弹的数量;bi和Bi分别为第i枚参战导弹的实际开销费用及其相对应的标准配置的基准费用。
2.1 可用性行向量 可用性行向量A为n+1维,即
 | (3) |
式中:A0为导弹均正常的概率,系统处于可用状态,其表达式为
 | (4) |
其中:awm为飞航导弹的可靠性。
Ak为系统有k枚导弹出故障的概率,系统处于可用状态,其表达式为
 | (5) |
An为n枚导弹均出故障的概率,系统处于不可用状态,其表达式为
 | (6) |
2.2 可信性矩阵 可信性矩阵为
 | (7) |
当i > j时,αij=0。
当i=j时,
 | (8) |
当i < j时,
 | (9) |
式中:T为系统的任务工作时间;MTBFs为系统的平局故障间隔时间[1]。
2.3 能力值 对于飞航导弹武器系统来说,能力向量C主要包括导弹的突防概率P1、交班成功率P2、命中概率P3和毁伤概率P4等。借助于任务载荷的优化配置以及编队决策与管理系统,飞航导弹编队可采用不同类型和规格的导引头高低搭配编组,通过编队支撑网络交换目标信息,能够有效地提高飞航导弹的基本能力指标P0=P1P2P3P4。
系统在执行任务过程中处于第i种状态时所对应的能力值ci为[1]
 | (10) |
式中:M为目标数;wij为在处于i状态下,攻击第j个目标的权值;cij为在处于i状态下,攻击第j个目标的能力值。
反舰导弹的最终击毁目标的概率一般可表示为[9]
 | (11) |
式中:pe为每枚导弹击中目标的概率;W为毁伤目标平均必需命中弹数;N为攻击目标的导弹总数,导弹自主编队的攻击目标的能力也最终反应到击毁目标的概率上,在式(11) 的基础上引入导弹自主编队CGCL (Ξ)的概念,则系统处于i状态下,攻击第j个目标的能力值为
 | (12) |
式中:P0k(i, Ξ, Λ)为CGCL为Ξ的系统处于i状态下时,系统中第k种配置的导弹与防御能力系数为Λ(0 < Λ≤1) 的目标群作战的基本能力指标;ξk为衡量第k种配置的导弹在作战中的重要程度的系数;nk为第k种配置的导弹的数量;Wj为毁伤第j个目标平均必需命中弹数;Nj为攻击第j个目标的导弹数,其中Ξ的确定需要对整个导弹自主编队系统进行协同制导与控制能力的评估,是导弹自主编队综合作战效能评估的关键工作。
3 协同制导与控制能力等级 3.1 协同制导与控制能力等级定义 参考文献[1]对CGCL的定义,结合导弹自主编队协同制导与控制系统的5大组成部分(编队支撑网络、信息获取系统、编队决策与管理系统、编队飞行控制系统和成员飞行控制系统)对CGCL进一步细分和描述, 如表 1所示。
表 1 导弹自主编队CGCL细化表 Table 1 Details of missile autonomous formation CGCL
| 能力 | CGCL等级 | |||||
| 1 | 2 | 3 | 4 | 5 | ||
| 决策与管理能力 | 决策机制 | 操作员决策 | 预编程 | 集中式决策 | 集散式/分层递阶式决策 | 分布式自主协同决策 |
| 目标分配能力 | 操作员分配 | 离线分配 | 集中式动态目标分配 | 集散式动态目标分配 | 分布式协同目标分配 | |
| 航路规划导引能力 | 操作员规划 | 离线航路规划 | 集中式在线航路规划 | 集散式在线航路规划 | 分布式协同航路规划 | |
| 离入队管理能力 | 操作员管理 | 无管理 | 集中式离入队管理 | 集散式离入队管理 | 自主协同离入队管理 | |
| 支撑网络能力 | 通信特征 | 指控链路 | 弹间链路 | 集中式拓扑 | 互联互通 | 按任务需求可变拓扑 |
| 网络认知能力 | 操作员认知 | 离线认知 | 集中式在线认知 | 自主集散式在线认知 | 自主分布式在线认知 | |
| 网络支撑质量 | 操作员管理 | 离线支撑 | 集中式在线支撑 | 自主集散式在线支撑 | 自主分布式在线支撑 | |
| 信息获取能力 | 环境信息获取 | 人工感知 | 人工监控感知 | 人工监控感知 | 半自主感知 | 自主实时动态感知 |
| 导引头优化配置 | 人工配置 | 计算机辅助配置 | 计算机辅助配置 | 自动配置 | 自动配置 | |
| 相对导航能力 | 卫星/惯导 | 卫星/惯导 | 卫星/惯导/数据链 | 卫星/惯导光学/数据链 | 卫星/惯导光学/数据链 | |
| 信息融合能力 | 人工融合 | 半自主融合 | 人工为主,计算机辅助 | 计算机融合,人工监控 | 全自主融合 | |
| 编队飞行控制能力 | 编队队形控制能力 | 极弱 | 弱 | 中等 | 强 | 极强 |
| 编队位置控制能力 | 极弱 | 弱 | 中等 | 强 | 极强 | |
| 编队冲突协调能力 | 极弱 | 弱 | 中等 | 强 | 极强 | |
表选项
目前各国现役的导弹武器装备的协同制导与控制能力基本处于第2、第3级,其中第2级的导弹编队主要处在预编程和预设飞行任务的阶段,可以作为分析导弹自主编队协同制导与控制能力的一个参照基准,而CGCL 3级以上的导弹编队是未来发展的主要方向。
3.2 协同制导与控制能力等级的确定 采用层次分析法(AHP)对导弹自主编队协同制导控制能力进行定量分析,即确定协同制导与控制能力系数,进而划分导弹自主编队协同制导控制的等级。层次分析法的原理框图如图 2所示。
 |
| 图 2 层次分析法原理框图 Fig. 2 Block diagram of principle of analytic hierarchy process |
| 图选项 |
确定CGCL具体步骤如下:
第1步??建立递阶层次结构,对导弹自主编队协同制导控制能力进行逐层分解。
按导弹自主编队的5大组成部分进行细分,其中成员飞行控制能力即导弹的传统的导航制导与控制能力,不作为导弹自主编队协同制导控制能力划分的重点,暂时认为该能力值固定不变,其余4个部分的考核内容划分如图 3所示。
 |
| 图 3 协同制导与控制能力层次分解图 Fig. 3 Breakdown drawing of cooperative guidance and control ability levels |
| 图选项 |
第2步??计算层次结构底层元素的组合权重。根据简易表格法,由专家填√得表,以第2层能力指标的具体能力权重为例,其相应的表格如表 2所示。
表 2 分系统能力权重简易表 Table 2 Subsystem ability weight summary
| 相对重要性 | 指标元素 | |||
| B1 | B2 | B3 | B4 | |
| 最重要 | √ | |||
| 相邻中值 | √ | |||
| 很重要 | √ | √ | ||
| 相邻中值 | ||||
| 比较重要 | ||||
| 相邻中值 | ||||
| 稍重要 | ||||
| 相邻中值 | ||||
| 不重要 | ||||
表选项
对应于各层能力的权重表格,分别计算相应的判断矩阵A,并求取特征向量。
 | (13) |
式中:aij为指标ai相对于指标aj的相对权重。
采用方根法计算判断矩阵的权向量,首先计算判断矩阵A的每一行元素的乘积[7]:
 | (14) |
再计算Mi的n次方根:
 | (15) |
对

 | (16) |
则所得的权重向量记为
 | (17) |
第3步??根据当前各个分系统的研究,给出各个评估内容的评估值。指标值取值范围为0~10。
图 3中导弹自主编队协同制导控制能力体系第3层的每种能力是导弹自主编队协同制导技术研究的关键。近年来相关研究越来越丰富,应用不同的协同与决策机制或算法,导弹自主编队将具备不同的协同制导与控制能力。专家根据导弹自主编队系统实际情况依据表 1对第3层各能力值进行评估,领域专家多为参与相关问题研究的人员,经过大量理论和仿真验证分析,给出各个子指标的评估值,即第3层各能力值Ci(i=1, 2, …, 14)。
进而可得到导弹自主编队协同制导控制能力的评估值,记为e, e∈[0, 10],其表达式为
 | (18) |
最终通过导弹自主编队协同制导控制能力的评估值划分CGCL(Ξ),其表达式为
 | (19) |
4 基本能力值计算 4.1 导弹自主编队成员突防概率 计算编队成员的突防概率P1,需要分析导弹自主编队从发射区到导弹击中目标的整个任务过程中影响导弹成功突防的所有因素,例如导弹回避威胁和障碍的能力、不被敌方雷达发现的能力、导弹编队协同航路规划的优化程度、生成导引指令的可行性、敌方的拦截和打击能力等。因此,导弹自主编队的成员突防概率P1可以表示为
 | (20) |
式中:







文献[8]中对上述大多数概率值进行定量分析和仿真验证,但缺少对导弹自主编队的不碰撞概率
P1值的确定与具体的作战条件和任务相关,难以给出固定的公式,但经大量分析和仿真可以描述为[1]
 | (21) |
式中:Ma为导弹飞行马赫数;h为导弹飞行高度;na为导弹的可用机动过载;RCSwm为导弹的雷达反射截面积;λ导弹流密度。
4.2 导弹自主编队成员交班成功率 当导弹编队进入中末制导交班阶段时,飞航导弹要依靠自身的导引头或者借助于编队支撑网络系统,成功地捕获指定的目标并转入末制导阶段。交班成功率P2就是衡量飞航导弹按要求由中制导状态成功转入末制导状态的概率。
中/末制导交班成功与否取决于交班点(交班区)的选取[13]、导引头探测误差以及导弹自主编队信息融合和动态目标分配的能力。
导弹自主编队成员的交班成功率不仅需要考虑是否能够捕捉并成功跟踪某一个目标,还要尽量使整体交班后的弹目分配最优。P2可描述为[1]
 | (22) |
式中:D为弹目距离;?为弹目接近速度;Ψ为弹目相对角度(方位角和高低角);

4.3 导弹自主编队成员命中概率 命中概率P3主要与飞航导弹的制导精度、目标的运动特性和外形尺寸密切相关。P3可描述为[1]
 | (23) |
式中:εG为导弹的制导精度;nT为目标的机动过载;ΩT为目标的外形尺寸。
4.4 导弹自主编队成员毁伤概率 毁伤概率P4主要与飞航导弹的毁伤能力、目标的易损性密切相关。P4可描述为[1]
 | (24) |
式中:εW为导弹的战斗部效能;ζFW为引信与战斗部的配合度;Ψwm为导弹的着靶状态;ζT为目标的易损性。
4.5 导弹自主编队P0k(i, Ξ, Λ)的确定 导弹自主编队的综合效能评估是与具体作战任务、作战环境息息相关的,在相同的CGCL下,对于不同配置、不同性能的导弹,其基本能力指标P0也有较大差别。由于各部分指标和协同制导与控制能力耦合严重,目前以第2级CGCL的导弹的基本能力指标P0(Ξ=2, Λ=1) 为基准,采用层次分析法得出的CGCL来修正导弹自主编队系统的P0值,CGCL对具备一定单体作战能力的导弹组成的自主编队的综合作战效能有显著提高,当Ξ=5时,P0值可以趋近于1,目前服役的巡航导弹基本都具备该条件,则P0k(i, Ξ, Λ)可表示为
 | (25) |
5 仿真验证 为了方便研究CGCL与导弹自主编队综合作战效能的关系,同时仿真和验证各分系统的相关技术,实验室成员一同搭建了IPCSIMLAB综合数字仿真平台,该系统由Vega Prime和Microsoft Visual Studio 2005软件搭建,以某型反舰弹的模拟数据建立非线性6自由度模型,导弹自主编队依照如图 4的战场想定遂行作战任务,该仿真平台具备各分系统功能可剪裁、战场态势实时显示和记录、单次作战效能计算等功能。
 |
| 图 4 典型作战想定示意图 Fig. 4 Schematic diagram of typical warfare scenario |
| 图选项 |
图 5为该仿真平台的程序框架流程图。在实时模式下,系统可以按照作战想定进行系统初始化、攻方对抗过程中各个功能模块初始化,为了使仿真过程更加合理化与真实化,进行了多线程创建与初始化,使每个作战单元分配一个独立的线程,各个线程并行运行,进行实时的攻方对抗仿真。在仿真控制的支配下进行视景循环显示,并进行作战评估和数据操作。
 |
| 图 5 程序框架流程图 Fig. 5 Application framework flowchart |
| 图选项 |
在该综合数字仿真平台上进行多次实时模式下的仿真测试实验,得出导弹编队作战仿真试验效能值E1,同时采用文中评估方法计算导弹自主编队综合作战效能值E2,并在综合数字仿真系统中对导弹自主编队的能力进行剪裁,得出不同CGCL下的2种效能值进行对比分析,对比分析流程如图 6所示。
 |
| 图 6 效能评估方法仿真验证流程 Fig. 6 Effectiveness evaluation method simulation verification flowchart |
| 图选项 |
为了突出分析导弹自主编队综合作战效能方法的可行性和有效性,仿真和计算中侧重CGCL的确定,以及评估值和综合数字仿真中作战效能的对比,这里给出相应的假设和说明:① 该型反舰导弹飞行包线为0.45 Ma~3.00 Ma,过载能力在±10 g以内,巡航高度为15 000 m,海上低空可达10 m;② 导弹自主编队中各导弹的可用性awm=0.9;③ 系统的任务工作时间T=1,MTBFs=1 000;④ 导弹命中概率P3=0.9,导弹命中目标的情况下的毁伤概率P4=1;⑤ 导弹自主编队规模为24,巡航马赫数为3,敌方舰队规模为8,毁伤每个舰船平均必需命中弹数均为2;⑥ 敌方雷达系统发现目标即能稳定跟踪,由发射区为200 km×80 km×24 000 m×15 m的中远程防空导弹拦截,拦截导弹最大与赫数为5,可用拦截弹数36,杀伤半径为10 m。
首先计算导弹编队P0k(i, 2, 1) 的值,计算过程参考文献[8-9],这里不作为重点内容列出。
然后采用AHP方法,依据3.2节中的具体步骤,得出数字仿真中某型反舰弹编队的各层指标的判断矩阵,第2层能力指标的判断矩阵为
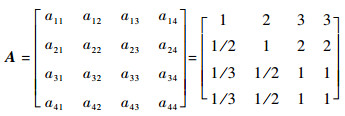 | (26) |
则采用方根法计算式(26) 的A-B判断矩阵的权向量,得到权向量:
 | (27) |
同理得到第3层的权向量为
 | (28) |
 | (29) |
 | (30) |
 | (31) |
进而按照3.2节中的计算方法求得第3层各能力值Ci(i=1, 2, …, 14) 的权重向量
 | (32) |
结合领域专家对不同导弹自主编队第3层能力值的评估结果,由式(18) 可以得到其相应的自主编队的协同制导与控制能力系数e的值,进而由式(19) 得到CGCL等级。
图 7~图 10给出综合数字仿真平台的实验视景,真实地显示出该作战想定的整个作战场景。
 |
| 图 7 仿真初始状态 Fig. 7 Initial state of simulation |
| 图选项 |
 |
| 图 8 导弹编队被拦截前仿真视景 Fig. 8 Simulation scene before missile formation being intercepted |
| 图选项 |
 |
| 图 9 拦截区仿真视景 Fig. 9 Intercept-zone simulation scene |
| 图选项 |
 |
| 图 10 目标被击毁仿真视景 Fig. 10 Simulation scene of targets being destroyed |
| 图选项 |
仿真平台的攻防态势显示界面中可实时监测导弹编队和目标舰船的健康状态,如图 11所示。
 |
| 图 11 攻防态势显示功能示意图 Fig. 11 Schematic diagram of offensive and defensive situation display function |
| 图选项 |
每次仿真结束,综合数字仿真平台可以根据存储的实验数据计算出单次仿真的各项概率值,进而得出实验法的P0值和综合作战效能,如图 12所示。
 |
| 图 12 单次仿真效能值计算窗口 Fig. 12 Single simulation efficiency value calculation window |
| 图选项 |
图 13为CGCL等级为2、3、4时,对应的30次综合数字仿真平台的仿真结果。
 |
| 图 13 综合数字仿真平台的仿真结果 Fig. 13 Simulation results of comprehensive digital simulation platform |
| 图选项 |
从图 13中可以看出,随着CGCL等级的提高,导弹自主编队的综合作战效能有明显提升,CGCL等级为3时,导弹自主编队以集中式决策和管理的方式进行编队飞行和遂行任务,相对于基本不具备协同能力的CGCL等级为2的导弹编队效能值平均提高了30.98%,而当CGCL等级为4时,效能值提高更为明显。
表 3中对评估法和实验法得出的综合作战效能的结果进行对比,其中实验法得出的仿真结果为30次仿真实验的统计值。
表 3 评估法和实验法结果对比表 Table 3 Result comparison between assessment method and experimental method
| CGCL等级 | 实验法统计值E1 | 评估法综合作战效能值E2 |
| 2 | 0.6520 | 0.6495 |
| 3 | 0.8540 | 0.8536 |
| 4 | 1.2486 | 1.2390 |
表选项
由表 3可以看出,评估法和实验法的仿真结果吻合较好,实验法需要数字仿真平台仿真大量的仿真和计算作为支撑,软件实现和仿真过程较为繁琐,而评估法基于CGCL的概念,从导弹自主编队的能力构成的角度分析了系统综合作战效能与各种能力的定性和定量的关系,可以快速高效地得出导弹自主编队的CGCL和综合作战效能。
6 结论 1) 基于AHP方法和ADC模型的导弹自主编队综合效能评估方法可以高效可靠地进行导弹自主编队的效能预评估,评估结果与实验法得出的结果相吻合。
2) 对导弹自主编队的CGCL的划分以及对各种能力的细分,较为全面地分析了影响当前导弹自主编队综合作战效能在协同与自主层面的关键技术,总结了导弹自主编队发展和提升的关键工作方向。
3) 以导弹自主编队为研究对象,结合文献[1]中导弹自主编队协同制导与控制系统的体系结构,提出了普遍适用于当前导弹自主编队的综合作战效能评估方法,并通过综合数字仿真平台仿真验证了该评估方法的有效性。
文献[1]将CGCL划分5个等级,其中CGCL等级为3以上的具有分布式协同能力的导弹自主编队是今后相关领域的研究重点,由于目前CGCL等级为5的导弹自主编队的相关技术和研究还不成熟,文中实验法中没有涉及相关的仿真。
参考文献
| [1] | 吴森堂. 导弹自主编队协同制导控制技术[M].北京: 国防工业出版社, 2015: 24. WU S T. Cooperative guidance & control of missiles autonomous formation[M].Beijing: National Defence Industrial Press, 2015: 24.(in Chinese) |
| [2] | 杜政, 王朝志, 陈万春. 巡航导弹群突防舰载反导系统快速分析模型[J].北京航空航天大学学报, 2013, 39(11): 1449–1454. DU Z, WANG C Z, CHEN W C, et al. Fast analytical model of cruise missiles penetration ship-based anti-missile system[J].Journal of Beijing University of Aeronautics and Astronautics, 2013, 39(11): 1449–1454.(in Chinese) |
| [3] | 谭守林, 闫双卡, 陈雪松, 等. 基于指数法的巡航导弹作战效能评估模型[J].火力与指挥控制, 2010, 35(5): 883–889. TAN S L, YAN S K, CHEN X S, et al. Fighting efficiency evaluation model of cruise missile based on index method[J].Fire Control & Command Control, 2010, 35(5): 883–889.(in Chinese) |
| [4] | 杨冬波. 地空导弹武器系统效能评估[D]. 南京: 南京理工大学, 2013: 40-67. YANG D B.Research on efficiency evaluation of suface-to-air missile system[D].Nanjing:Nanjing University of Science and Technology, 2013:40-67(in Chinese).http://cdmd.cnki.com.cn/Article/CDMD-10288-1013354496.htm |
| [5] | 李廷杰. 导弹武器系统的效能及其分析[M].北京: 国防工业出版社, 2000: 2-10. LI T J. The effectiveness of missile weapon system and its analysis[M].Beijing: National Defence Industrial Press, 2000: 2-10.(in Chinese) |
| [6] | 费智聪. 熵权-层次分析法与灰色-层次分析法研究[D]. 天津: 天津大学, 2009: 5-10. FEI Z C.Research on entropy weight-analytic hierarchy process and grey-analytic hierarchy process[D].Tianjin:Tianjin University, 2009:5-10(in Chinese).http://cdmd.cnki.com.cn/Article/CDMD-10056-2010092343.htm |
| [7] | 毛红保, 田松, 晁爱农. 无人机任务规划[M].北京: 国防工业出版社, 2015: 179-188. MAO H B, TIAN S, CHAO A N. UAV mission planning[M].Beijing: National Defence Industrial Press, 2015: 179-188.(in Chinese) |
| [8] | 阎磊, 吴森堂. 飞航导弹编队制导作战效能分析方法研究[J].现代防御技术, 2008, 36(5): 15–20. YAN L, WU S T. Research on the combat effectiveness analysis method of formation guidance of aerodynamic missile[J].Modern Defense Technology, 2008, 36(5): 15–20.(in Chinese) |
| [9] | 郭齐胜, 郅志刚, 杨瑞平. 装备效能评估概论[M].北京: 国防工业出版社, 2005: 30-65. GUO Q S, ZHI Z G, YANG R P. Introduction to equipment effectiveness evaluation[M].Beijing: National Defence Industrial Press, 2005: 30-65.(in Chinese) |
| [10] | SHI D L, WU S T, et al.Research on the safety distance for missile formation[C]//Proceedings of IEEE International Symposium on Instrumentation & Measurement, Sensor Network and Automation(IMSNA).Piscataway, NJ:IEEE Press, 2014:1717-1721. |
| [11] | 娄联堂, 周成平, 丁明跃, 等. 基于误差随机过程无人飞行器的撞地概率计算公式[J].宇航学报, 2003, 24(2): 121–129. LOU L T, ZHOU C P, DING M Y, et al. Clobber probability of pilotless aircraft based on error stochastic process[J].Journal of Astronautics, 2003, 24(2): 121–129.(in Chinese) |
| [12] | 周韬, 周慧钟. 导弹主要参数对撞地概率的影响研究[J].北京航空航天大学学报, 1999, 25(2): 240–243. ZHOU T, ZHOU H Z. Research of effect of missile main parameters on the clobber probability[J].Journal of Beijing University of Aeronautics and Astronautics, 1999, 25(2): 240–243.(in Chinese) |
| [13] | 彭琛, 吴森堂. 反舰导弹中/末制导交班点目标捕捉方法研究[J].飞行力学, 2008, 26(2): 37–44. PENG C, WU S T. Study on capture probability of anti-ship missiles at hand-over point[J].Flight Dynamics, 2008, 26(2): 37–44.(in Chinese) |
