甄文战等[4-5]基于UH模型理论及变换应力方法,采用FORTRAN语言首先编写了UH模型的用户材料子程序 (UMAT),实现了UH模型与有限元软件的结合;冯兴等[6-7]在UH模型UMAT的基础上,加入罗汀等[8]将熊文林[9]提出的非关联塑性切线刚度矩阵对称化方法应用于UH模型内容,并采用与广义SMP准则相似的处理方法编写出了考虑黏聚力c的UH模型UMAT。
原有的UH模型UMAT都是基于不发生破坏的受压应力状态编写而成,事实上,在有限元计算实际工程问题时,很多时候不可避免地会出现局部单元拉裂、剪坏的情况,这种情况的出现不仅会造成计算结果本身的不合理,也有可能会导致有限元计算时出现中途报错退出计算的情况,从而降低了采用UH模型UMAT进行有限元计算的稳定性和实用性。
本文针对采用UH模型UMAT进行有限元计算时出现的单元破坏问题 (包括拉裂和剪坏),参考平面问题单元破坏修正方法,并结合不同坐标系下应力之间的变换关系,推导得到适用于UH模型的三维问题单元破坏修正公式,对采用UH模型UMAT进行有限元计算时出现的破坏应力状态进行相应的应力修正,以使得采用UH模型UMAT的有限元计算过程更加稳定,计算结果更为合理。
1 UH模型及其有限元实现 1.1 UH模型 姚仰平等[10]提出的UH模型是基于当前屈服面 (当前应力点所在的屈服面) 和参考屈服面 (参考应力点所在的剑桥模型屈服面) 的动态变化关系以及与伏斯列夫面变化有关的潜在强度的不同,来描述超固结土的硬化、软化、临界状态、剪缩、剪胀特性和不同应力路径对超固结土变形特性的影响。
如图 1所示,UH模型的当前屈服面与参考屈服面均为椭圆屈服面。
 |
| 图 1 UH模型的当前屈服面与参考屈服面 Fig. 1 Current yield surface and referential yield surface of UH model |
| 图选项 |
当前屈服面表达式为
 | (1) |
参考屈服面表达式为
 | (2) |
式中:

 | (3) |
其中:
 | (4) |
 | (5) |
 | (6) |
1.2 变换应力方法 UH模型UMAT中采用姚仰平等[11-12]提出的变换应力方法进行三维化 (见图 2),变换应力与真实应力之间的映射关系为
 |
| 图 2 变换应力空间 Fig. 2 Transformed stress space |
| 图选项 |
 | (7) |
式中:


根据式 (7) 可推得变换应力与真实应力之间的变换关系为
 | (8) |
式中:

1.3 UH模型的UMAT UH模型的UMAT[13-14]是在UH模型理论基础上,引入了变换应力三维化方法,并加入黏聚力c和弹塑性刚度矩阵对称化内容,采用FORTRAN语言编写而成的,UH模型UMAT采用半隐式回映应力更新算法,具体的计算流程如图 3所示。
 |
| 图 3 UH模型UMAT计算流程图 Fig. 3 Computation flowchart of UH model's UMAT |
| 图选项 |
2 单元拉裂修正 在使用UH模型UMAT进行有限元计算时,有时局部单元的积分点上会出现拉裂应力 (





针对拉裂应力引起的两方面问题,需要对出现的不合理拉裂应力进行修正,本文将在已有的平面问题单元拉裂修正方法[15]基础上,提出适用于UH模型的三维问题单元拉裂修正方法。
2.1 平面问题的单元拉裂修正 对于平面问题单元拉裂修正,可以通过结合Mohr应力圆,并基于一定的假设条件推导出相应的拉裂修正计算公式。如图 4所示,若假定该积分点的最大主应力σ1保持不变,将σ3修正为0,并假定主应力方向不发生变化,即可得到平面问题单元拉裂修正公式为
 |
| 图 4 平面问题的单元拉裂修正 Fig. 4 Element tension failure correction of plane problem |
| 图选项 |
 | (9) |
式中:τ′xz的符号与τxz一致。
2.2 适用于UH模型的三维问题单元拉裂修正 虽然平面问题的单元拉裂修正可以解决平面问题的拉裂情况,但是对于不能简化为平面问题的三维问题则并不适用;而UH模型UMAT本身是基于三维单元编写的,因此,平面问题的拉裂修正并不适合直接在UH模型UMAT中的应用,所以需要对平面问题的拉裂修正进行扩展而得到适用于更一般的三维问题的拉裂修正方法。本文所述的三维问题的拉裂修正方法需要用到不同坐标系下的应力变换关系[16]。
2.2.1 主应力与应力分量之间的变换关系 设新旧2个笛卡儿直角坐标系分别为Ox′y′z′和Oxyz,则2个坐标系下的应力分量之间的变换关系为
 | (10) |
式中:σ′ij为新坐标系Ox′y′z′下的应力张量;σkl为旧坐标系Oxyz下的应力张量;lik和ljl为坐标变换张量。
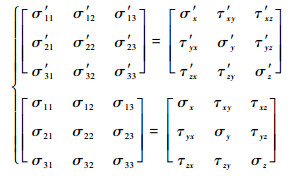 | (11) |
设新旧坐标系Ox′y′z′和Oxyz坐标轴之间的方向余弦如表 1所示。
表 1 新旧坐标轴之间的方向余弦 Table 1 Direction cosine between new and old coordinate
| 坐标轴 | x | y | z |
| x′ | l1 | m1 | n1 |
| y′ | l2 | m2 | n2 |
| z′ | l3 | m3 | n3 |
表选项
将式 (10) 展开即可得
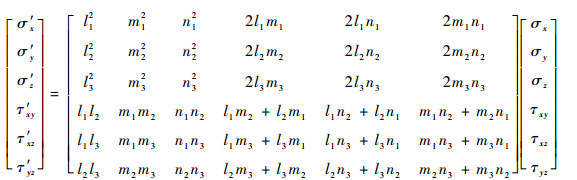 | (12) |
假定旧坐标系Oxyz的x、y、z轴对应于σ1、σ2、σ3方向,新坐标系Ox′y′z′的x′、y′、z′轴与σx、σy、σz方向重合,则有
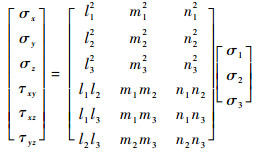 | (13) |
式中:l1、l2和l3为σ1在Ox′y′z′坐标系中的方向余弦;m1、m2和m3为σ2在Ox′y′z′坐标系中的方向余弦;n1、n2和n3为σ3在Ox′y′z′坐标系中的方向余弦。
2.2.2 拉裂修正原理 采用UH模型UMAT进行有限元计算时,若出现拉裂情况,也即

假定1?拉裂之后,认为土不可以再承受拉应力,也即取σ3=0。
假定2?中主应力参数
假定3?最大主应力σ1不变。
假定4?主应力方向不变。
事实上,假定3可以有2种情况:竖向应力σz不变和最大主应力σ1不变。竖向应力σz保持不变的假定对于以竖向载荷为主的情况更为合理,但不适用于大正应力非竖向的情况,例如出现被动土压力情况;而假定最大主应力σ1不变的拉裂修正则不会存在这个问题,其具有更大的适用性;而且对于以竖向载荷为主的情况,假定最大主应力σ1不变的拉裂修正和假定竖向应力σz不变的拉裂修正得到结果是很接近的;假定σ1不变的拉裂修正公式相对而言也更为简单,所以本文所述的拉裂修正采用的是基于最大主应力σ1不变的假定。通过假定1~假定3即可推得修正后的主应力与修正前的主应力之间的关系为
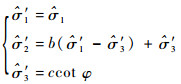 | (14) |
得到拉裂修正之后的主应力,再根据假定4和式 (13) 即可得到修正改之后的六维应力分量为
 | (15) |
式中:


3 单元剪坏修正 经过第2节所述的单元拉裂修正虽然消除了不合理的拉裂应力状态,但该应力还有可能超出抗剪强度包线,这种应力状态理论上也是不合理的,因此需要再对其进行剪坏修正。
3.1 平面问题的单元剪坏修正 与平面问题的单元拉裂修正方法相似,可以结合一定的假设条件和Mohr应力圆,推导出基于Mohr-Coulomb强度理论的平面问题单元剪坏修正公式[15]。如图 5所示,若假定该积分点的最大主应力σ1不变,修正之后Mohr圆与强度破坏包线相切,且假定修正前后的主应力方向不发生改变,则可以推得平面问题单元剪坏修正的计算公式为
 |
| 图 5 平面问题的单元剪坏修正 Fig. 5 Element shear failure correction of plane problem |
| 图选项 |
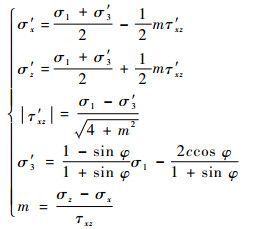 | (16) |
式中:τ′xz的符号与τxz一致。
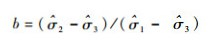
3.2 适用于UH模型的三维问题单元剪坏修正 对于三维问题的单元剪坏修正,可以参考平面问题单元剪坏修正的假设条件和三维问题单元拉裂修正的处理方法得到。在采用UH模型UMAT进行有限元计算时,若出现



假定1?

假定2?中主应力参数
假定3?最大主应力σ1不变。
假定4?主应力方向不变。
事实上,假定3可以有3种情况:平均正应力p不变、竖向应力σz不变和最大主应力σ1不变。若假定修正前后平均正应力p不变,则剪坏修正会使得大正应力值变化很大,而一般来说,外载荷主要由与之方向相一致的大主应力承担,因此这种假定的剪坏修正对于计算收敛性会有较大的影响;假定竖向应力σz不变的剪坏修正对于以竖向载荷为主的情况来说是更为合理的,但实际问题的大正应力方向不一定都是竖向的,对于大正应力非竖向则该假定也就不再合适了;最大主应力σ1不变的假定对大正应力值改动很小,所以可以降低修正对计算收敛性的影响,而且该假定不仅适用于大正应力竖向的情况,也适用于大正应力非竖向的情况,具有更大的适用性,所以本文所述的剪坏修正是基于最大主应力σ1不变假定的。通过假定1~假定3,有
 | (17) |
式中:
 | (18) |
联合式 (17)、式 (18),可推得更新后的主应力分量为
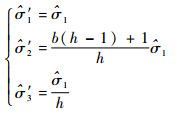 | (19) |
式中:
 | (20) |
得到修正之后的主应力分量,再根据式 (15) 即可推导得到经过剪坏修正之后的六维应力分量。
4 破坏修正的有限元验证 UH模型UMAT的单元验证可以参见参考文献[6],本文不再赘述。本文将采用一个有限元计算基坑开挖的例子来说明拉裂修正和剪坏修正的有效性。UH模型UMAT是基于三维单元编写的,这里通过对边界条件的特殊设置来实现用三维单元描述平面问题。基坑的各个部分几何尺寸如图 6所示。土材料的本构模型选用UH模型,模型参数取值如表 2所示。表中:ν为泊松比;N为e-lnp空间中正常压缩线的截距 (即当p=1时的孔隙比)。支护桩采用线弹性模型,弹性模量E=30 GPa,泊松比ν=0.1。土体与支护桩之间采用简单的绑定约束。图 7为计算模型的网格划分,土单元与墙单元均采用8节点六面体实体单元,单元总数为1 380,开挖区土单元数为150,墙单元数为20。
 |
| 图 6 计算模型的几何尺寸 Fig. 6 Geometric dimension of computation model |
| 图选项 |
 |
| 图 7 计算模型网格划分 Fig. 7 Computation model meshing |
| 图选项 |
表 2 UH模型参数取值 Table 2 Parameter value of UH model
| 参数 | M | ν | κ | λ | e0 | N | c/kPa |
| 数值 | 0.984 | 0.3 | 0.016 | 0.09 | 0.6 | 1.15 | 10 |
表选项
图 8为有无破坏修正的土体

 |
图 8 有无破坏修正的土体  |
| 图选项 |
表 3为图 8(a)中1 244号单元第1积分点和18号单元第4积分点破坏修正前后的主应力分量、应力分量、应力比









表 3 破坏修正前后计算结果对比 Table 3 Comparison of calculation results before and after failure correction
| 变量 | 1 244号单元第1积分点 | 18号单元第4积分点 | |||
| 修正前 | 修正后 | 修正前 | 修正后 | ||
 | 32.53 | 32.53 | 42.11 | 42.11 | |
 | 7.39 | 23.97 | 5.07 | 23.93 | |
 | -14.16 | 21.44 | -7.47 | 21.44 | |
| σx/kPa | -11.16 | 3.51 | -15.61 | 2.86 | |
| σy/kPa | -35.600 | 0.007 | -28.910 | 0 | |
| σz/kPa | 8.19 | 10.10 | 19.92 | 20.30 | |
| τxz/kPa | -8.03 | -2.74 | -5.24 | -2.57 | |
 | 4.714 | 0.387 | 3.373 | 0.670 | |
 | 1.908 | 1.908 | 1.801 | 1.801 | |
 | -0.223 | 29.290 | -0.444 | 10.830 | |
表选项
由第2节和第3节的描述可知,拉裂和剪坏的判定均是基于考虑了黏聚力之后的应力


图 8(a)和图 8(b)分别为基坑开挖至3.75 m时没有破坏修正 (为了避免由于破坏应力而导致的中途退出计算情况,需对由于破坏应力导致的数学错误做相应的处理) 和有破坏修正计算得到的




图 9和图 10分别为有无破坏修正的应力比









 |
图 9 有无破坏修正的土体的  |
| 图选项 |
 |
图 10 有无破坏修正的土体的  |
| 图选项 |
图 11为有无破坏修正和有破坏修正的


 |
图 11 有无破坏修正的土体的  |
| 图选项 |
图 12为有无破坏修正与有破坏修正的竖向位移等值云图。可以看出,两者的位移分布形式是一致的,但破坏修正使得整体变形值变小,这是因为UH模型中,弹塑性刚度矩阵是与应力状态相关的,一般来说,平均正应力p越大,刚度也越大,破坏修正会提高平均正应力p的值 (参见图 4和图 5),也就提高了破坏单元的刚度矩阵,而其他单元的刚度矩阵是基本不变的,因此破坏修正会提高整体的刚度矩阵值,从而导致整体变形值的下降。
 |
| 图 12 有无破坏修正的土体的竖向位移等值云图 Fig. 12 Vertical displacement contour of soils with and without failure correction |
| 图选项 |
对于采用有破坏修正UH模型UMAT的有限元计算,一个迭代步下实际的计算流程为:先调用UH模型UMAT进行应力更新得到应力σ;再调用破坏修正子程序进行破坏修正得到应力σ′;由破坏修正的应力σ′可以计算得到不平衡力ΔR′,再用不平衡力ΔR′进行有限元的平衡迭代。不平衡力ΔR′具体表达式为
 | (21) |
式 (21) 又可以化为
 | (22) |
式中:
 | (23) |
 | (24) |
其中:ΔR为没有破坏修正的不平衡力;Δr为破坏修正引起的附加不平衡力。因此,如果破坏修正准则较为合理,也有可能使得破坏修正引起的附加不平衡力Δr降低总的不平衡力,提高迭代计算的收敛性。如本文所述的计算基坑开挖的例子,有破坏修正的计算收敛性就好于没有破坏修正的计算收敛性,在计算第1、2、3层开挖时,没有破坏修正分别用了4、7、92个增量步,而有破坏修正则分别用了1、7、8个增量步,这也说明了本文所采用的破坏修正假定是较为合理的。
综上所述,采用有破坏修正的UH模型UMAT的有限元计算不仅避免了由于破坏应力状态引起的计算中断问题,也消除了计算结果中的不合理破坏应力状态,使得计算过程更加稳定,计算结果更为合理。
5 结论 在采用UH模型UMAT进行有限元计算时,经常会遇到局部单元出现破坏应力的情况 (主要包括拉裂和剪坏),这种破坏应力的存在是不合理的:一方面,土单元所受的应力不应该超出理论上的强度包线;另一方面,破坏应力的存在会导致有限元计算上出现相应的稳定性问题。
1) 针对在有限元计算过程中出现的局部单元破坏问题,本文介绍了一种适用于UH模型的三维问题单元破坏修正方法,该方法不仅可以消除有限元计算中出现的不合理的破坏应力状态,以及由于这种应力状态而导致的计算稳定性问题,而且该方法并没有改变原有UH模型UMAT的算法流程,不会由于这种修正而导致原有UH模型的UMAT产生新的理论上的问题。
2) 本文所述的单元破坏修正方法对于有限元计算收敛性是存在影响的,由于修正过程强制修改了应力分量,会产生了新的不平衡力,理论上会增加有限元迭代的步数。但一方面这种修正一般只是对局部少数单元的修正,因此产生的不平衡力一般不会很大;另一方面,修正之后的应力如果变得更为合理,也有可能降低了迭代的不平衡力,降低有限元计算整体的迭代步数,提高计算的收敛性。
参考文献
| [1] | YAO Y P, HOU W, ZHOU A N. UH model:Three-dimensional unified hardening model for overconsolidated clays[J].Géotech-nique, 2009, 59(5): 451–469.DOI:10.1680/geot.2007.00029 |
| [2] | 姚仰平, 侯伟, 罗汀. 土的统一硬化模型[J].岩石力学与工程学报, 2009, 28(10): 2135–2151. YAO Y P, HOU W, LUO T. Unified hardening model for soils[J].Chinese Journal of Rock Mechanics and Engineering, 2009, 28(10): 2135–2151.DOI:10.3321/j.issn:1000-6915.2009.10.023(in Chinese) |
| [3] | 姚仰平, 李自强, 侯伟, 等. 基于改进伏斯列夫线的超固结土本构模型[J].水利学报, 2008, 39(11): 1244–1250. YAOY P, LI Z Q, HOU W, et al. Constitutive model of over-consolidated clay based on improved Hvorslev envelope[J].Journal of Hydraulic Engineering, 2008, 39(11): 1244–1250.DOI:10.3321/j.issn:0559-9350.2008.11.013(in Chinese) |
| [4] | 甄文战. 岩土材料变形局部化问题理论及数值分析研究[D]. 上海: 上海大学, 2013: 24-31. ZHEN W Z.Theoretical and numberical simulations of deformation localization of geomaterials[D].Shanghai:Shanghai University, 2013:24-31(in Chinese). |
| [5] | 甄文战, 孙德安. 统一硬化参数模型在有限元中的应用及验证[C]//岩土力学与工程新进展. 上海: 同济大学出版社, 2007: 70-73. ZHEN W Z, SUN D A.Application and verification of unified hardening parameter model in finite element analysis[C]//New Development of Rock and Soil Mechanics and Engineering. Shanghai:Tongji University Press, 2007:70-73(in Chinese). |
| [6] | 姚仰平, 冯兴, 黄祥, 等. UH模型在有限元分析中的应用[J].岩土力学, 2010, 31(1): 237–245. YAO Y P, FENG X, HUANG X, et al. Application of UH model to finite element analysis[J].Rock and Soil Mechanics, 2010, 31(1): 237–245.(in Chinese) |
| [7] | 冯兴. UH模型的有限元实现及其在地基变形分析中的应用[D]. 北京: 北京航空航天大学, 2013: 38-80. FENG X.Finite element realization of UH model and its application to the analysis of subgrade deformation[D].Beijing:Beijing University of Aeronautics and Astronautics, 2013:38-80(in Chinese). |
| [8] | 罗汀, 秦振华, 姚仰平, 等. UH模型切线刚度矩阵对称化及其应用[J].力学学报, 2011, 43(6): 1186–1190. LUO T, QIN Z H, YAO Y P, et al. Symmetrization and applications of tangent stiffness matrix for UH model[J].Chinese Journal of Theoretical and Applied Mechanics, 2011, 43(6): 1186–1190.DOI:10.6052/0459-1879-2011-6-lxxb2010-538(in Chinese) |
| [9] | 熊文林. 非关联塑性切线刚度矩阵的对称表示[J].应用数学和力学, 1986, 7(11): 983–991. XIONG W L. Symmetric formulation of tangential stiffness for non-associated plasticity[J].Applied Mathematics and Mechanics, 1986, 7(11): 983–991.(in Chinese) |
| [10] | 罗汀, 姚仰平, 侯伟. 土的本构关系[M].北京: 人民交通出版社, 2010: 170-179. LUO T, YAO Y P, HOU W. Soil constitutive models[M].Beijing: China Communication Press, 2010: 170-179.(in Chinese) |
| [11] | 王乃东, 姚仰平. 基于变换应力方法的各向异性模型三维化[J].岩土工程学报, 2011, 33(1): 50–56. WANG N D, YAO Y P. Generalization of anisotropic constitutive models using transformedstress method[J].Chinese Journal of Geotechnical Engineering, 2011, 33(1): 50–56.(in Chinese) |
| [12] | MATSUOKA H, YAO Y P, SUN D A. The Cam-claymodels revised by the SMP criterion[J].Journal of the Japanese Geotechnical Society Soils & Foundation, 1999, 39(1): 81–95. |
| [13] | 黄祥. 超固结土模型与ABAQUS软件结合与应用[D]. 北京: 北京航空航天大学, 2010: 17-24. HUANG X.The application of combining over-consolidated clay model of ABAQUS[D].Beijing:Beijing University of Aeronautics and Astronautics, 2010:17-24(in Chinese). |
| [14] | 罗汀, 张盼盼, 姚仰平, 等. 考虑膨胀效应的UH模型及其有限元实现[J].北京航空航天大学学报, 2016, 42(1): 13–20. LUO T, ZHANG P P, YAO Y P, et al. UH model considering the expansion of the soils and its finite element implementation[J].Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(1): 13–20.(in Chinese) |
| [15] | 钱家欢, 殷宗泽. 土工原理与计算[M]. 2版. 北京: 中国水利水电出版社, 1996: 91-92. QIAN J H, YIN Z Z.Principle and calculation of geotechnical engineering[M].2nd ed.Beijing:China Water & Power Press, 1996:91-92(in Chinese). |
| [16] | 杨光华, 李广信, 介玉新. 土的本构模型的广义位势理论及其应用[M].北京: 中国水利水电出版社, 2007: 41-43. YANG G H, LI G X, JIE Y X. The generalized potential theory and its application of the constitutive model of soils[M].Beijing: China Water & Power Press, 2007: 41-43.(in Chinese) |
