 |
| 图 1 天文导航系统工作流程Fig. 1 Workflow of celestial navigation system |
| 图选项 |
2 多视场复合光学敏感器结构设计多视场复合光学敏感器的结构如图 2所示,它主要由四面镜和单一光学敏感器构成,四面镜垂直倒置在光学敏感器正上方。虽然光学敏感器为单一敏感器,但它同时接收了四面镜4个面所反射的光线,因此,其效果等同于4个视场组合观测的效果,能够对地球、恒星和月球等不同目标进行同时观测。
 |
| 图 2 虚拟多视场复合光学敏感器Fig. 2 Composite optical sensor with virtual multi-field-of-view |
| 图选项 |
视场中所出现的天体目标及量测信息取决于其视场轴的指向,而复合光学敏感器4个视场的视场轴指向是由敏感器的安装方式和四面镜的参数共同决定的。由文献[4,5]可知星敏感器视场轴位于轨道平面内时导航精度最高,因此整个敏感器采用侧安装的方式,以尽量保证4个视场的视场轴均位于轨道平面内。光学敏感器的视场设计与轨道高度有关,现选择半长轴a=9000km,轨道高度为2628.996km的卫星轨道进行研究。图 3为四面镜侧安装的俯视图,4个方向分别为4个虚拟视场的视场轴指向,图中:Re为地球半径,γ为视场视轴与地心坐标系下卫星的位置矢量r的夹角,卫星速度矢量v为逆时针方向。两个视场轴向上倾斜观测导航星,两个向下倾斜观测地球边缘和折射星。图 4为敏感器光学系统结构示意图,1~4为成像元件的4个区域,每个区域对应敏感器的一个视场,4个视场的观测信息成像在不同的区域,观测对象的像得到了分割,使得导航信息的后续提取较易。设定四面镜镜面与中心轴的夹角θ为40°,此时4个视场的视轴与轨道平面夹角不超过0.5°。四面镜选取对称四棱镜,此时相邻视场的视场轴夹角为90°,侧安装后γ=45°。由几何关系arcsin(Re/a)≈45.0634°可知,向下倾斜的视场视轴指向地球边缘附近,此时可获得较多的地球边缘及折射星的信息。
 |
| 图 3 四面镜安装示意图(俯视图)Fig. 3 Installation sketch map of prism(vertical view) |
| 图选项 |
 |
| 图 4 光学敏感器系统成像模型Fig. 4 Imaging model of optical sensor system |
| 图选项 |
3 观测方式多视场光学敏感器可同时观测导航星、折射星和地球边缘,但实际情况中地球边缘比恒星亮度大,观测地球的视场需镀上减光涂层以保证地球和星光同时得到适宜的曝光。此外,文献[6]中指出捕获将要离开大气(卫星速度方向)的折射星光相对比较困难,而观测将要下降(卫星速度反方向)的恒星比较容易,因此分配速度方向的视场观测地球,反方向的视场观测折射星。多视场光学敏感器可同时观测多种量测信息,因此导航系统可实现多种观测方案。现根据四面镜的系统参数、安装参数,结合导航原理及实际情况,提出5种可实现的观测方式:①单组直接敏感地平:利用1个直射视场观测导航星,1个地球视场观测地球边缘,获取1个星光角距作为观测量。②单组间接敏感地平:利用1个直射视场观测的导航星信息,从折射星视场中识别出1个折射星,获取折射角,计算对应视高度作为观测量。③单组直接结合单组间接敏感地平:利用1个直射视场观测导航星,1个地球视场观测地球边缘,获得1个星光角距作为观测量;利用直射视场观测的导航星信息,从折射星视场中识别出1个折射星,获取相应的折射角,计算出视高度作为另一个观测量;2个观测量进行信息融合。④双组直接敏感地平:利用2个直射视场观测导航星,两个地球视场观测地球边缘,获取2个星光角距作为观测量,并进行信息融合。⑤双组直接结合单组间接敏感地平:利用2个直射视场观测导航星,1个地球视场观测地球边缘,获取2个星光角距作为观测量;利用直射视场观测的导航星信息,从折射星视场中识别出1个折射星,获取折射星的折射角,计算出视高度作为第3个观测量;3个观测量进行信息融合实现导航。其观测视场利用示意图如图 5所示,相同线型为获得同一量测信息配合使用的视场。
 |
| 图 5 视场利用示意图Fig. 5 Use sketch map of field-of-view |
| 图选项 |
4 基于信息融合的天文导航系统4.1 航天器轨道模型
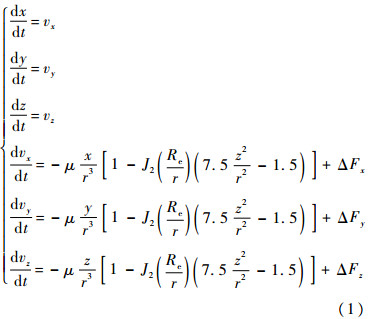
轨道模型可表示为
 (t)=f(X,t)。其中,状态矢量为X=[x y z vx vy vz]T,x、y、z、vx、vy和vz分别为x、y和z3个方向上卫星的位置和速度投影;J2和μ分别为地球引力系数和地心引力常数;r为r的大小。ΔFx、ΔFy和ΔFz分别为地球非球形摄动的高阶摄动项和日月摄动以及太阳摄动和大气摄动等摄动力的影响[7]。4.2 观测模型4.2.1 直接敏感地平量测方程直接敏感地平导航中经常采用星光角距作为观测量,航天器上观测到的地心矢量与导航恒星的星光矢量的夹角即为星光角距,如图 6所示,图中:s为导航星的单位星光矢量;α为星光角距。
(t)=f(X,t)。其中,状态矢量为X=[x y z vx vy vz]T,x、y、z、vx、vy和vz分别为x、y和z3个方向上卫星的位置和速度投影;J2和μ分别为地球引力系数和地心引力常数;r为r的大小。ΔFx、ΔFy和ΔFz分别为地球非球形摄动的高阶摄动项和日月摄动以及太阳摄动和大气摄动等摄动力的影响[7]。4.2 观测模型4.2.1 直接敏感地平量测方程直接敏感地平导航中经常采用星光角距作为观测量,航天器上观测到的地心矢量与导航恒星的星光矢量的夹角即为星光角距,如图 6所示,图中:s为导航星的单位星光矢量;α为星光角距。 |
| 图 6 直接敏感地平量测模型Fig. 6 Measurement model of directly sensing horizon method |
| 图选项 |
由图 6中的几何关系可知,星光角距α和直接敏感地平导航量测量Z的表达式为


式中:Vα为量测噪声。4.2.2 间接敏感地平量测方程由于空间中的大气呈不均匀分布,当星光通过大气时,光线会发生折射向地心方向弯曲,此时卫星上观测到的恒星位置将略高于其实际位置。星光折射间接敏感地平即利用了大气的这种光学特性,其量测模型如图 7所示,图中:ha为卫星上观测到的折射光线相对地球的高度;hg为星光到地面的实际切线距离;折射前后光线间的夹角R为星光折射角。
 |
| us—折射前的星光单位矢量;u=|r·us|。图 7 星光折射敏感地平量测模型Fig. 7 Measurement model of stellar horizon atmospheric refraction method |
| 图选项 |
文献[8]给出了ha与R和大气密度ρ之间的关系:
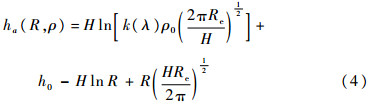
式中:k(λ)为由波长λ决定的散射系数;h0为参考高度;ρ0和H分别为高度h0处的密度和密度标尺高度。根据经验可以得到近似公式[9]:

另外,由图 7的几何关系可知

式中:ε通常为非常小的量,可忽略。式(5)和式(6)建立了折射角与航天器位置矢量之间的关系,被作为星光折射自主导航的量测模型。4.3 基于信息融合的卡尔曼滤波算法传统的推广卡尔曼滤波在天文导航中会引入较大的非线性误差[10, 11],而常用的非线性滤波算法——Unscented Kalman Filter(UKF)在实际导航中也容易出现发散的情况[12, 13],因此本文选用平方根UKF(SRUKF)算法[14],既能保证系统计算结果的收敛,同时又提高了计算精度[15]。组合导航过程中会出现多个量测信息,需对信息进行分散滤波。本文在SRUKF的基础上,使用联邦滤波,由主滤波器向各子滤波器动态分布初始条件信息、噪声信息和观测信息,设计了适用于复合多视场光学敏感器的SRUKF分散滤波方案[16]。其具体步骤如下:1) 信息分配。滤波系统包含主滤波器和多个子滤波器,βM、βi分别为主滤波器和子滤波器的分配因子,由信息守恒原理可知

系统噪声Q和状态方差P通过信息分配因子βM、βi分配到主滤波器和各子滤波器,分配原则为

式中:i=1,2,…,n,M;
 (k)和i(k)分别为总状态估计值和子滤波器状态估计值。2) 时间更新。主滤波器和子滤波器同时进行SRUKF时间更新,且相互独立。3) 量测更新。主滤波器无量测信息,量测信息由各子滤波器接收后进行SRUKF量测更新。4) 信息融合。将主滤波器和各子滤波器更新后的状态估计M(k)、i(k)和方差阵PM(k)、Pi(k)融合,可得到总状态估计(k)和总方差P(k):
(k)和i(k)分别为总状态估计值和子滤波器状态估计值。2) 时间更新。主滤波器和子滤波器同时进行SRUKF时间更新,且相互独立。3) 量测更新。主滤波器无量测信息,量测信息由各子滤波器接收后进行SRUKF量测更新。4) 信息融合。将主滤波器和各子滤波器更新后的状态估计M(k)、i(k)和方差阵PM(k)、Pi(k)融合,可得到总状态估计(k)和总方差P(k):
步骤1)中联邦滤波信息因子的分配有多种策略,此处选用基于矩阵范数进行信息动态分配的算法:首先确定主滤波器信息因子βM,然后依据βM对各子滤波器信息因子进行分配,且第k步的βi(k)与上一步协方差阵Pi(k-1)的范数成正比,即

式中: ‖‖F为Frobenius范数。对于任意矩阵A,有

5 计算机仿真5.1 仿真条件仿真使用的轨道数据由软件STK产生,力学模型采用JGM3,参数设置如下:
1) 轨道参数。半长轴a=9000km,偏心率e=0,轨道倾角i=98.1358°,升交点赤经Ω=254.145°,近升角距ω=0°。2) 敏感器精度。视场大小为10°×10°,星敏感器精度为1″(1σ),采用SAO星表中亮于5.0m的星为完备基本星表。3) 滤波初始值。系统噪声方差Q=diag[22 22 22 0.022 0.022 0.022],量测噪声方差R=diag[802 802 … 802],R的维数取决于量测信息个数。5.2 仿真结果仿真时间为8000个滤波周期,每个滤波周期为3s。由于直接敏感地平方案收敛较慢,仿真时间延长为25000个周期。仿真结果如图 8所示。
 |
| 图 8 5种观测方式的位置与速度估计误差Fig. 8 Position and velocity estimation errors of five practicable observing modes |
| 图选项 |
为了更直观地比较不同观测方式的导航结果,在表 1中列出了5种观测方式在相同仿真条件下的导航误差。表 1 仿真结果Table 1 Results of simulation
| 观测方式 | 位置估计误差/m | 速度估计误差/ (m·s-1) | ||
| 最大值 | 平均值 | 最大值 | 平均值 | |
| 单组直接敏感地平 | 510.9635 | 191.4595 | 0.3406 | 0.1371 |
| 单组间接敏感地平 | 74.1984 | 29.7289 | 0.0695 | 0.0289 |
| 双组直接敏感地平 | 93.0672 | 37.0790 | 0.0699 | 0.0433 |
| 单组直接结合 单组间接敏感地平 | 51.2227 | 24.3268 | 0.0581 | 0.0262 |
| 双组直接结合 单组间接敏感地平 | 42.3178 | 12.6782 | 0.0539 | 0.0247 |
表选项
6 结 论本文基于四面镜结构提出了一种新型的复合多视场光学敏感器,并研究了其具体导航方案,经过仿真验证表明:1) 间接敏感地平的导航精度远远高于直接敏感地平,这是因为星光折射模型远比根据地球边缘拟合地心的模型精确。此外,由于对多个量测信息进行了信息融合,因此组合导航系统的定位精度优于单独使用其中任意一种方案的系统。2) 从四面镜实现的角度出发,双组直接敏感地平与单组间接敏感地平组合的导航方式综合了直接敏感地平信息的连续性和间接敏感地平信息的准确性,而且最大程度地融合了全部观测信息,因此其定位精度最高,位置误差达到了10m量级。本文提出的新型复合光学敏感器导航系统实现高精度的自主天文导航的同时,保证了系统重量体积的轻小化,对于卫星的自主导航研究与应用很有实际应用价值。
参考文献
| [1] | KVHL C T F.Combined earth/star sensor for attitude and orbit determination of geostationary satellites[D].Stuttgart:University of Stuttgart,2005:27-79. |
| Click to display the text | |
| [2] | 宁晓琳,房建成.一种基于信息融合的卫星自主天文导航新方法[J].宇航学报,2003,24(6):579-583. NING X L,FANG J C.A new method of autonomous celestial navigation for spacecraft based on information fusion[J].Journal of Astronautics,2003,24(6):579-583(in Chinese). |
| Cited By in Cnki (23) | |
| [3] | 宁晓琳,马辛.地球卫星自主天文导航滤波方法性能分析[J].控制理论与应用,2010,27(4):423-430. NING X L,MA X.Analysis of filtering methods for satellite celestial navigation[J].Control Theory & Applications,2010,27(4):423-430(in Chinese). |
| Cited By in Cnki (2) | |
| [4] | 宋利芳,房建成.航天器天文导航中星敏感器最佳安装方位研究[J].北京航空航天大学学报,2006,32(1):22-26. SONG L F,FANG J C.Optimum installation azimuth of star sensor for spacecraft celestial navigation[J].Journal of Beijing University of Aeronautics and Astronautics,2006,32(1):22-26(in Chinese). |
| Cited By in Cnki (5) | |
| [5] | FANG J C,NING X L.Installation direction analysis of star sensors by hybrid condition number[J].IEEE Transactions on Instrumentation and Measurement,2009,58(10):3567-3582. |
| Click to display the text | |
| [6] | SAVELY R T,COCKRELL B F,PINES S.Apollo experience report onboard navigational and alignment software:NASA TN D-6471[R].Washington,D.C.:NASA,1972. |
| [7] | 田玉龙,房建成,宁晓琳.自主天文导航系统中的两种状态方程特性分析[J].系统工程与电子技术,2004,26(12):1829-1831. TIAN Y L,FANG J C,NING X L.Two kinds of motion equations used in autonomous celestial navigation and characteristic anslysis[J].Systems Engineering and Electronics,2004,26(12):1829-1831(in Chinese). |
| Cited By in Cnki (8) | |
| [8] | 房建成,宁晓琳.航天器自主天文导航原理与方法[M].北京:国防工业出版社,2006:103-107. FANG J C,NING X L.Spacecraft autonomous celestial navigation principle and method[M].Beijing:National Defense Industry Press,2006:103-107(in Chinese). |
| [9] | NING X L,WANG L H,BAI X B,et al.Autonomous satellite navigation using starlight refraction angle measurement[J].Advances in Space Research,2013,51(9):1761-1772. |
| Click to display the text | |
| [10] | 安笛.UKF性能分析及其在组合导航中的应用[D].哈尔滨:哈尔滨工程大学,2011:7-10. AN D.Performance analysis of UKF and application in integrated navigation system[D].Harbin:Harbin Engineering University,2011:7-10 (in Chinese). |
| Cited By in Cnki (2) | |
| [11] | 金智慧.近地卫星自主天文导航的算法与DSP实现研究[D].哈尔滨:哈尔滨工业大学,2007:19-26. JIN Z H.Study on autonomous celestial navigation algorithm and its DSP realization of near earth satellite[D].Harbin:Harbin Institute of Technology,2007:19-26 (in Chinese). |
| Cited By in Cnki | |
| [12] | JULIER S J,UHLMANN J K.Reduced sigma point filters for the propagation of means and covariances through nonlinear transformations[C]//Proceedings of the American Control Conference.Piscataway,NJ:IEEE Press,2002,2:887-892. |
| Click to display the text | |
| [13] | JULIER S J,UHLMANN J K,DURRANT-WHYTE H F.A new method for the nonlinear transformation of means and covariances in filters and estimators[J].Transactions on Automatic Control,2000,45(3):477-482. |
| Click to display the text | |
| [14] | VAN DER MERWE R,WAN E A.The square-root unscented Kalman filter for state and parameter-estimation[C]//Proceedings of the IEEE International Conference on Acoustics,Speech,and Singnal Processing.Piscataway,NJ:IEEE Press,2001,6:3461-3464. |
| Click to display the text | |
| [15] | 陆海勇.捷联惯性导航系统中UKF滤波技术的应用研究[D].南京:南京航空航天大学,2009:25-29. LU H Y.Research on application of UKF in strapdown inertial navigation system[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2009:25-29(in Chinese). |
| Cited By in Cnki (4) | |
| [16] | 刘瑞华,刘建业.联邦滤波信息分配新方法[J].中国惯性技术学报,2001,9(2):28-32. LIU R H,LIU J Y.A New method of information-sharing in federated filter[J].Journal of Chinese Inertia Technology,2001,9(2):28-32(in Chinese). |
| Cited By in Cnki (53) |
