 |
| 图 1 弹目相对运动Fig. 1 Missile-to-target relative motion |
| 图选项 |
由弹目相对运动方程可知:

式中,r为弹目相对距离;q为弹目视线角;Vt和Vm分别表示目标速度和导弹速度.为简化数学模型,假设目标和导弹的速度大小对时间的导数
 t=0和m=0.此外,令目标和导弹的法向加速度分别为At=Vt
t=0和m=0.此外,令目标和导弹的法向加速度分别为At=Vt t,Am=Vmm,其中θt和θm分别为目标和导弹的航迹倾角,t和m分别为目标和导弹的航迹倾角对时间的导数.因此,式(1)两边对时间t求导,可得
t,Am=Vmm,其中θt和θm分别为目标和导弹的航迹倾角,t和m分别为目标和导弹的航迹倾角对时间的导数.因此,式(1)两边对时间t求导,可得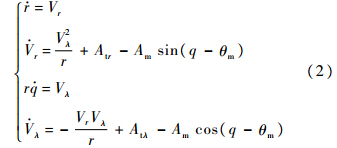
式中,
 和
和 分别为弹目相对距离和弹目视线角对时间的导数;Vr和Vλ分别表示导弹和目标的相对速度在沿视线和垂直视线方向上的分量,其中Vr = Vtcos(q-θt)-Vmcos(q-θm),Vλ = -Vtsin(q-θt)+Vmsin(q-θm),Atr = Atsin(q-θt),Atλ = Atcos(q-θt),定义Atr和Atλ分别为目标法向加速度沿视线和垂直视线方向的分量.在实际工程应用中,目标的法向加速度是未知的,如何实时地准确快速估测出Atr和Atλ的值是制导律设计的关键. 假设1 系统(2)中各个状态变量r,q,Vr,Vλ和θm均可直接得到[11]. 假设2 在导弹对目标实施拦截打击过程中,目标法向加速度At是未知有界的,则Atr和Atλ满足如下关系[11]:
分别为弹目相对距离和弹目视线角对时间的导数;Vr和Vλ分别表示导弹和目标的相对速度在沿视线和垂直视线方向上的分量,其中Vr = Vtcos(q-θt)-Vmcos(q-θm),Vλ = -Vtsin(q-θt)+Vmsin(q-θm),Atr = Atsin(q-θt),Atλ = Atcos(q-θt),定义Atr和Atλ分别为目标法向加速度沿视线和垂直视线方向的分量.在实际工程应用中,目标的法向加速度是未知的,如何实时地准确快速估测出Atr和Atλ的值是制导律设计的关键. 假设1 系统(2)中各个状态变量r,q,Vr,Vλ和θm均可直接得到[11]. 假设2 在导弹对目标实施拦截打击过程中,目标法向加速度At是未知有界的,则Atr和Atλ满足如下关系[11]: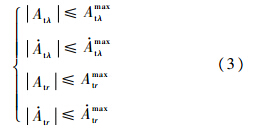
式中,Atλmax,
 tλmax,Atrmax,trmax为未知上界.在实际的导弹制导控制系统中,由于目标机动对导弹的不确定性,Atλmax,tλmax,Atrmax,trmax在系统中不易由导引头测量得到. 1.2 拦截策略众所周知,导弹对目标的直接拦截策略是基于零化视线角速率=0理论提出的[12].本文采取另一种拦截策略,即
tλmax,Atrmax,trmax为未知上界.在实际的导弹制导控制系统中,由于目标机动对导弹的不确定性,Atλmax,tλmax,Atrmax,trmax在系统中不易由导引头测量得到. 1.2 拦截策略众所周知,导弹对目标的直接拦截策略是基于零化视线角速率=0理论提出的[12].本文采取另一种拦截策略,即
式中c0为设计参数且c0>0.令e=Vλ-c0
 则要实现拦截策略(4)需设计一个在有限时间内可令e趋于零的反馈控制器.该拦截制导策略的有效性证明详见文献[11]. 2 基于ESO的导弹滑模制导律设计 为了使导弹实现1.2节所述拦截策略,本文采用滑模控制理论来对导弹制导律进行设计.对于系统(2),选取滑模面为
则要实现拦截策略(4)需设计一个在有限时间内可令e趋于零的反馈控制器.该拦截制导策略的有效性证明详见文献[11]. 2 基于ESO的导弹滑模制导律设计 为了使导弹实现1.2节所述拦截策略,本文采用滑模控制理论来对导弹制导律进行设计.对于系统(2),选取滑模面为
根据滑模运动的可达性条件,令S对时间t求导,采用如下趋近律:

式中,趋近律设计参数k>0,σ>0,0<γ<1.该趋近律能够保证闭环系统(2)的状态轨迹以有限时间收敛于滑模面S的邻域内.取闭环系统(2)的控制量u=Am,式(5)对时间求导,并联立式(2)和式(6),则
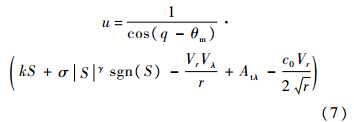
在实际工程应用中,系统无法快速准确获得Atλ的大小.故本文采用ESO对闭环系统(2)中的未知项Atλ进行实时的观测和动态补偿.将系统(2)中的未知项扩张为一个新的状态,构成如下所示的系统:
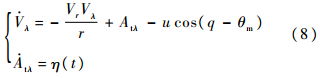
式中,函数η(t)为目标加速度分量Atλ的导数,则对系统(8)设计二阶扩张状态观测器,其数学模型为
式中,e1为ESO对系统状态量的观测误差;z1和z2为ESO对系统(8)的状态观测值;β01和β02为ESO的观测增益;函数fal( · )的表达式如下所示:
其中α1和δ为ESO的设计参数.通过选择合适的β01和β02可以使得ESO能够很好地对状态Vλ和被扩张状态Atλ进行观测和动态补偿[13].因此,联立式(7)和式(9)可得基于ESO的导弹滑模制导律(ESMG)的控制量为
同时,本文在制导律仿真过程中考虑自动驾驶仪的动态特性,将自动驾驶仪视为二阶振荡环节,则通过自动驾驶仪输入给弹体环节的控制指令Amc满足下式:

针对本文所设计的滑模制导律,存在合适的β01,β02,α1和δ,使得观测值z1和z2分别收敛于Vλ和Atλ的邻域内,通过采用控制律(11),使闭环系统(2)中各个状态的运动轨迹以有限时间收敛于滑模面S=0附近. 3 稳定性证明为了便于系统的稳定性分析,首先给出如下引理. 引理1 [14] 假设V(x)是定义域为U⊂R n且一阶连续可导的正定函数,

式中V(x0)为V(x)的初值. 文献[15]给出了ESO的稳定性证明.此处将不再论述.当β02取值足够大、β01取值足够小,则ESO的观测误差趋于零,也就是说ESO的观测量z1和z2分别以有限时间收敛于Vλ和Atλ的邻域内. 大量数值仿真实验表明,非线性函数fal中的参数选择α1=1/2n-1,δ=h,其中n为扩张状态观测器的阶数,h为积分步长.当α1和δ确定时,根据系统的时间尺度概念,参数β0i(i=1,2)基本与积分步长有关,由工程经验可知:β01≈1/h,β02≈h2/3[15].针对系统(8)构造如下的Lyapunov函数:

对式(14)按时间t求导可得
假设存在一个权数0<ε≤1,使得不等式(15)可以写成

显然,若V(γ+1)/2>(S e2 /2(γ+1)/2(1-ε)σ),则
+2(γ+1)/2εσV(γ+1)/2为定义域上的半负定函数.由于0<(γ+1)/2<1,由引理1可知,随着V的减小,闭环系统满足: V(γ+1)/2≤(S e2 /2(γ+1)/2(1-ε)σ)系统收敛性得证,且S满足:
式中0<ε0<1.同时,函数V收敛至零的时间Treach满足下式:
因此,当ESO稳定时,通过调节控制律中k和σ的值可使闭环系统的轨迹收敛于滑模面S=0的邻域内.当ESO能够准确估计系统中的不确定项时,参数k和σ越大,闭环系统中各个状态量以有限时间的收敛性越好,系统所取的滑模面S越能趋近于零;然而,在实际问题中,过大的k和σ会使得控制量过大而超过导弹系统自身物理条件的限制,因此在系统参数整定时需要权衡考虑设计方法和实际物理条件对参数的影响. 4 仿真结果分析选取导弹的初始位置为xm(0)=0m,ym(0)=0m,目标的初始位置为xt(0)=20km,yt(0)=20km;c0=0.1;导弹导引头对视线角速率测量需经过时间常数为30ms的一阶惯性环节;导弹的最大机动过载为20;导弹在拦截过程中速度满足下述关系:
此外,导弹自动驾驶仪的二阶动态特性相关参数为ω=10,ξ=0.7.在所设计的ESMG中,开关函数sgn( · )的滞后性会使控制量Am在实际仿真过程中产生高频抖振现象,进而影响了系统本身的稳定性,使导弹命中精度降低.在制导律设计时,为削弱控制量的抖振现象,采用连续函数sat( · )代替式(11)中的开关函数.

式中δ0为消颤因子,δ0=0.01.为验证所设计制导律的优越性,与基于有限时间收敛理论设计的导引律(FTCG)[12]进行对比,其数学模型为

式中,N>2;β>0;0<n≤1;ψ为目标机动加速度的上界,ψ=100.针对上述制导律设计方法,对下面算例中的3种情况进行对比仿真.仿真中,ESMG的模型参数统一取为:γ=0.5,k=1.25,σ=1.2,β01=50,β02=100,α1=0.2,δ=0.15. 算例1 目标作法向加速度为At=10gsint(单位:m/s2)的高速机动.1) 迎击拦截速度为480m/s的目标.针对这种情况,取导弹的初始航迹角分别为θ=90°,45°,0°,FTCG中N=3.3,β=10,n=0.5,导弹与目标的运动曲线如图 2(a)所示.不同初始航迹角下,ESMG得到的脱靶量分别为0.16,0.96,0.82m,而FTCG得到的脱靶量分别为0.53,1.38,1.48m.
 |
| 图 2 算例1中弹目相对运动曲线Fig. 2 Curves of relative motion between missile and target in Case 1 |
| 图选项 |
2) 尾追拦截速度为480m/s的目标.针对这种情况,取导弹的初始航迹角分别为θ=90°,45°,0°,FTCG中N=10,β=10,n=0.5,导弹与目标的运动曲线如图 2(b)所示.不同初始航迹角下,ESMG得到的脱靶量分别为0.70,0.16,0.03m,而FTCG得到的脱靶量分别为8.02,5.31,4.06m.3) 前向拦截速度为1100m/s的目标.针对这种情况,取导弹的初始航迹角分别为θ=90°,45°,0°,FTCG中N=10,β=10,n=0.5,导弹与目标的运动曲线如图 2(c)所示.不同初始航迹角下,ESMG得到的脱靶量分别为1.26,1.31m,而FTCG得到的脱靶量分别为10.05,11.37m. 算例2 为进一步验证ESMG在目标的法向加速度非周期变化时的有效性,考虑Case 1中的3种拦截方式对非周期高速机动目标进行拦截.目标法向加速度如图 3所示.
 |
| 图 3 目标法向加速度Fig. 3 Normal acceleration of target |
| 图选项 |
1) 迎击拦截速度为480m/s的目标.取导弹的初始航迹角与制导律中相关参数同算例1,导弹与目标的运动曲线如图 4(a)所示.不同初始航迹角下,ESMG得到的脱靶量分别为0.47,0.76,0.68m,而FTCG得到的脱靶量分别为 8.16,8.15,8.17m.
 |
| 图 4 算例2中弹目相对运动曲线Fig. 4 Curves of relative motion between missile and target in Case 2 |
| 图选项 |
2) 尾追拦截速度为480m/s的目标.取导弹的初始航迹角与制导律中相关参数同算例1,导弹与目标的运动曲线如图 4(b)所示.不同初始航迹角下,ESMG得到的脱靶量分别为1.47,1.14,1.49m,而FTCG得到的脱靶量分别为14.23,14.31,14.17m.3) 前向拦截速度为1100m/s的目标.取导弹的初始航迹角与制导律中相关参数同算例1,导弹与目标的运动曲线如图 4(c)所示.不同初始航迹角下,ESMG得到的脱靶量分别为0.41,0.52m,而FTCG得到的脱靶量分别为9.72,10.17m.由上述对比仿真结果可以看出,ESMG使导弹在拦截时间和脱靶量方面均要小于FTCG.同时,针对不同的初始航迹角和拦截方法,ESMG表现出在导弹运动方面更强的鲁棒性,导弹运动轨迹和脱靶量受拦截初始条件的不同影响更小.ESMG可以使导弹在不同拦截策略下以更大的精度对高速机动目标实施拦截打击.由于篇幅所限,图 5仅给出了初始航迹角θ=90°时导弹以上述3种拦截方式拦截目标的法向过载变化曲线,虽然在导弹运动初期ESMG对导弹的需用过载要求比较大,但在导弹真正实施对机动目标的拦截打击末制导段时,ESMG所需的最大过载小于FTCG.因此,ESMG降低了导弹拦截末段的需用过载,提高了导弹武器的可靠性,在导弹可用过载一定的情况下,能够使导弹有效地攻击机动性更高的目标.
 |
| 图 5 不同拦截方式(θ=90°)下导弹法向过载变化曲线Fig. 5 Curves of missile normal overload in different intercepting ways(θ=90°) |
| 图选项 |
图 6给出了初始航迹角为θ=90°时导弹迎击拦截机动目标时导弹控制输入量变化曲线,由于仿真中考虑自动驾驶仪的二阶动态特性,控制量Am的真实响应具有一定的振荡和时滞特性,间接验证了所设计制导律的实用性.
 |
| 图 6 控制输入量变化曲线Fig. 6 Variation curves of control input |
| 图选项 |
如图 7所示,采用所设计的状态反馈控制律能够保证滑模面在有限时间内趋近于零,从而实现对导弹所设计的拦截策略(2).
 |
| 图 7 滑模面变化曲线Fig. 7 Variation curves of sliding mode surface |
| 图选项 |
图 8为ESO对未知目标加速度的观测曲线.通过ESO对目标加速度的实时观测和补偿,实现了降低导弹拦截末端需用过载的目的.
 |
| 图 8 ESO对未知项加速度的观测曲线Fig. 8 Curves of estimated value of ESO to acceleration of unknown term |
| 图选项 |
5 结 论本文在传统变结构制导律的基础上提出了一种新的滑模制导律,经仿真验证表明:1) 本文所设计制导律中的扩张状态观测器能够实时地对目标机动加速度进行跟踪观测和反馈补偿,达到了减小导弹打击过程中需用过载的目的.2) 针对导弹采用不同的拦截策略打击各种快速高机动目标的问题,本文所设计的制导律能够保证导弹以更短的时间、更小的末端需用过载实现对目标的精确打击.
参考文献
| [1] | Zhang Q Z, Wang Z B,Tao F.Optimal guidance law design for impact with terminal angle of attack constraint[J].Optik,2014,125(1):243-251. |
| Click to display the text | |
| [2] | Hexner G, Shima T.Stochastic optimal control guidance law with bounded acceleration[J].IEEE Transaction on Aerospace and Electronic Systems,2007,43(1):71-78. |
| Click to display the text | |
| [3] | 张友安,黄诘, 孙阳平.带有落角约束的一般加权最优制导律[J].航空学报,2014, 35(3):848-856. Zhang Y A,Huang J,Sun Y P.Generalized weighted optimal guidance laws with impact angle constraint[J].Acta Aeronautica et Astronautica Sinica,2014,35(3):848-856(in Chinese). |
| Cited By in Cnki (2) | |
| [4] | Zhang Z X, Li S H,Luo S.Terminal guidance laws of missile based on ISMC and NDOB with impact angle constraint[J].Aerospace Science and Technology,2013,31(1):30-41. |
| Click to display the text | |
| [5] | 朱凯,齐乃明. 基于滑模干扰观测器的垂直攻击末制导律研究[J].兵工学报,2011,32(12):1462-1467. Zhu K,Qi N M.Research on vertical impact terminal guidance law based on sliding mode disturbance observer[J].Acta Armamentrii,2011,32(12):1462-1467(in Chinese). |
| Cited By in Cnki (4) | |
| [6] | 马克茂,马杰. 机动目标拦截的变结构制导律设计与实现[J].宇航学报,2010,31(6):1589-1595. Ma K M,Ma J.Design and implementation of variable structure guidance law for maneuvering target interception[J].Journal of Astronautics,2010,31(6):1589-1595(in Chinese). |
| Cited By in Cnki (12) | |
| [7] | 窦荣斌,张科. 基于二阶滑模的再入飞行器末制导律研究[J].宇航学报,2011,32(10):2109-2114. Dou R B,Zhang K.Research on terminal guidance law for re-entry vehicle based on second-order sliding mode control[J].Journal of Astronautics,2011,32(10):2109-2114(in Chinese). |
| Cited By in Cnki (6) | |
| [8] | 熊俊辉,唐胜景, 郭杰,等.基于模糊变系数策略的迎击拦截变结构制导律设计[J].兵工学报,2014,35(1):134-139. Xiong J H,Tang S J,Guo J,et al.Design of variable structure guidance law for head-on interception based on variable coefficient strategy[J].Acta Armamentarii,2014,35(1):134-139(in Chinese). |
| Cited By in Cnki | Click to display the text | |
| [9] | Moosapour S S, Alizadeh G,Khanmohammadi S,et al.A novel robust proportional navigation guidance law design for missile considering autopilot dynamic[J].Transactions of the Institute of Measurement and Control,2013,35(3):703-710. |
| [10] | 王嘉鑫,林德福, 宋韬.引入参考目标的比例导引制导律研究[J].航天控制,2013,31(6):31-35. Wang J X,Lin D F,Song T.The proportional navigation guidance law with reference object[J].Aerospace Control,2013,31(6): 31-35(in Chinese). |
| Cited By in Cnki | Click to display the text | |
| [11] | Shtessel Y, Shkolnikov L,Levant A.Guidance and control of missile interceptor using second-order sliding modes[J].IEEE Transaction on Aerospace and Electronic Systems,2009,45(1): 110-124. |
| Click to display the text | |
| [12] | Zhou D, Sun S.Guidance laws with finite time convergence[J]. Journal of Guidance,Control,and Dynamics,2009,32(6): 1838-1846. |
| Click to display the text | |
| [13] | 马悦悦,唐胜景, 郭杰,等.基于自抗扰和模糊逻辑的大攻角控制系统设计[J].系统工程与电子技术,2013,35(8):1711-1716. Ma Y Y,Tang S J,Guo J,et al.High angle of attack control system design based on ADRC and fuzzy[J].Systems Engineering and Electronics,2013,35(8):1711-1716(in Chinese). |
| Cited By in Cnki (5) | |
| [14] | Bhat S P, Bernstein D S.Finite-time stability of continuous autonomous systems[J].SIAM Journal of Control and Optimization,2000,38(8):751-766. |
| [15] | 韩京清. 自抗扰控制技术——估计补偿不确定因素的控制技术[M].北京:国防工业出版社,2008:221-237. Han J Q.Active disturbance rejection control technique:the technique for estimating and compensating the uncertainties[M].Beijing:National Defence Industry Press,2008:221-237. |
