��ͳ�ĺ����Ż�����һ���ӷɻ�Ϊ�ʵ�[5, 6, 7, 8, 9, 10, 11],����ϸ���������ص�ƽ�����⡣�ɻ���ʵ�ʷ���ʱ,��ͨ��ƫת�����Ա��������ش���ƽ��״̬[12, 13],�Ա�֤ʵ���ȶ�����������Ҫ������ƽ������ɻ���ȫ������ȷ����仯�����ڷɻ������������������������������,���,���ڷɻ��ʵ����Ĵ�ͳ�����Ż���������һ���ļ������;����,������沼�ַɻ����ж��ֶ��������ƽ��ʽ,��ͬ�ķ�ʽ��ȫ������ȵ�Ӱ�첻ͬ,������������ܵ�Ӱ��Ҳ����ͬ��
�����������,���ķ����˶������������ЧӦ�Էɻ��������ܵ�Ӱ��;�ڴ˻�����,����˻��ڶ�����ƽ���������к����Ż�������ͨ���ڴ�ͳ�����Ż����������������ƽ,һ�������ʵ�ֺ����ľ�ȷ�Ż�;��һ����,���ڶ�����沼�ַɻ�,����ȷ�������ŵĶ��������ƽ����,�Ӷ�����ȵط��ӷɻ����������ܡ�
1 ����������ԭ���ĺ����Ż���������������ԭ���ĺ����Ż�����[14, 15]�DZ��ĵ��о�����������������ԭ��,�ɻ���λ�����Ķ���������֮��Ϊ��Ч����,�����ʽΪ

ʽ��:E��h��V�ֱ�Ϊ��Ч���������и߶Ⱥͷ����ٶȡ�
�ɻ����ܺ����������Ρ�Ѳ�������½���3�����нε�ˮƽ���о������,��ͼ 1��ʾ��
 |
| ͼ 1 �ɻ������������ Fig. 1 Vertical flight profile of airplane |
| ͼѡ�� |
�������ĽǶ�����,��������,�ɻ���������,������������,��˵�Ч�����ӳ�ʼֵEi������Ec;��Ѳ����,�ɻ���ֱƽ��,������������,��˵�Ч����Ec���ֲ���;���½���,�ɻ������»�,����С������,���,��Ч������Ec�ݼ�������ֵEj��
����ʽ(1)��ɻ��������ʵ��˶�����[12],�ɵõ��ɻ����ʵ������˶�ģ��:

ʽ��:x������mf��Wf�ֱ�Ϊˮƽ���о��롢������ǡ��������ͷ�����ȼ��������
��ʽ(2)�еķ��о��뷽�̽��л���,�ɵõ��ɻ������������½��εĺ��̡����,�Ժ������Ϊ����ָ��ĺ����Ż�������Ա�ʾΪ
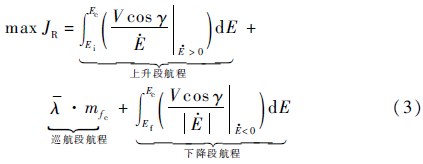
ʽ��:JRΪͼ 1��3�����нε��ܺ���;mfcΪ�ɻ���Ѳ���εĺ�����;��-ΪѲ���ε�ƽ��ȼ�����,ȼ�����ָ�ɻ����ĵ�λȼ������õĺ��̡�
��ͼ 1��ʾ,Ѳ���κ��������������κ���������״̬���½��κ�������ʼ״̬�����,ȫ�������溽���Ż��ĵ�1�����Ż�Ѳ���κ������ڴ˻�����,�ֱ�������������½��κ������Ż���
������Сֵԭ��,�����Ż��������տ���ת��Ϊʽ(4)��ʾ�Ĵ��������ĵ�̬��ֵ����(pointwise extremization problem)[15]:
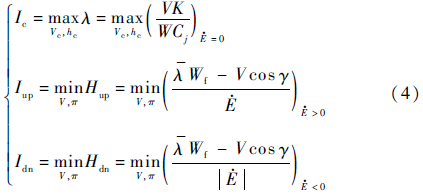
ʽ��:�±�c��up��dn�ֱ�ΪѲ���Ρ������κ��½���;��ΪѲ���ε�ȼ�����;Hup��Hdn�ֱ�Ϊ���������½��εĹ��ܶٺ���;K��W��Cj�����ֱ�Ϊ����ȡ��ɻ���������������λʱ�䵥λ������ȼ�������ͷ���������λ�á�
�ܷ���״̬��Ӱ��,�ɻ��ڸ����нε�ȼ�;����Բ�ͬ,���ɻ���������Ѳ�����½�����,������ͬ��ȼ���������ĺ��̲�ͬ����ɻ������������ӡ����½��μ��ٵ�λ��Ч����ʱ��õĺ��̷ֱ�Ϊ��Rup�릤Rdn,��������̵ĺ���������Ѳ��,�������ĺ���Ϊ��Rc,��ֱ��妤Rc����Rup����Rc����RdnΪ�ɻ��������ɱ����½��ɱ���
��ɻ����������й������ܵ������ɱ����½��ɱ��ֱ�ΪCup��Cdn�����ɻ����е�ȼ�Ͷ�����Ѳ����ʱ����������ΪRc,��ɻ���ʵ���ܺ���ΪRc��Cup��Cdn��RcԽ��,Cup��CdnԽС,�ɻ����ܺ�����Խ��
ʽ(4)��,��Խ��,��ʾRcԽ��;���������½��εĹ��ܶٺ���Hup��Hdn����ͳһ��ʾΪ

��ʽ(5)��ʾ,Vcos��dt��ʾ�ɻ�������������(���½��μ���)��λ��Ч����ʱ����õĺ���,��-Wfdt��ʾ����������ĵ�ȼ��������Ѳ��ʱ�������ĺ���,���,���ܶٺ���H��Ϊ�ɻ�������(���½�)�ɱ���HԽС,�ɻ����ܺ��̽�Խ��
��������,��ʽ(4)��ʾ,Ѳ���κ����Ż�����ȼ�������Ϊ����ָ�ꡢ?=0ΪԼ�������������ٶ�����и߶�Ϊ���Ʊ���,ͨ�����Ʊ���Ѱ��,ʹ���ﵽ���; �����κ����Ż����������ɱ�HupΪ����ָ�ꡢ? > 0ΪԼ�������������ٶ�������λ��Ϊ���Ʊ���,ͨ�����Ʊ���Ѱ��,ʹHup�ﵽ��С;�½��κ����Ż������½��ɱ�HdnΪ����ָ�ꡢ? < 0ΪԼ�������������ٶ�������λ��Ϊ���Ʊ���,ͨ�����Ʊ���Ѱ��,ʹHdn�ﵽ��С��
2 ������ƽ�Էɻ��������ܵ�Ӱ�� 2.1 ������ƽ��ȫ������ȵ�Ӱ�챾����ij�ͷɻ�Ϊ�о�����,Ϊ����������,�÷ɻ������˴�չ�ұ��һ�����Խ϶̵��������͡����������������������,��Ҫ���ö����������������֤�ɿ���,������ж��ֶ�����ƽ��ʽ����������������ǰ�������������������,�ڷ��й�����,ǰ���������������������Ե��������ƫת,Ϊ�ɻ��ṩ��ƽ���ء�
����ƫת���ı�ɻ�����������,�Ҳ�ͬ�Ķ�����ƽ��ʽ�Էɻ��������Ե�Ӱ��Ҳ��ͬ�����ڱ��ĵ��о�����,���ɻ���ֱƽ��(h=12 km,Ma=0.8)ʱ,��ǰ�������浥����ƽ(ǰ����ƽ)�����������浥����ƽ(������ƽ)�Լ�ǰ������������������������ƽ(�����ƽ)�������ȫ������ȱ仯��ͼ 2��ʾ��
 |
| ͼ 2 ������ƽ��ȫ������ȵ�Ӱ�� Fig. 2 Effects of control surface trimming on lift-drag ratio of aircraft |
| ͼѡ�� |
�ɻ����ֶ�ֱ����ʱ��Ҫ����������ƽ�⡢������ƽ����������ƽ��3�����������ݷɻ��������˶�����[12],�����Ӧ����ƽӭ�ǡ���ƽ��������ƽ����,����ʹ�ɻ���������3��ƽ����������ͬһ����������,���ڵ�һ������ƽ��ʽ,ֻ����Ψһ����ƽ��;���ڶ��������ƽ��ʽ,����ڶ�����ƽ�⡣���,ͼ 2�и����˶��������ƽ��ʽ�µ�2�����������,�ֱ��Ӧ�������С��ȫ������ȡ���ͼ 2��ʾ,������ƽ�����Եظı�ɻ���ȫ������ȡ�����,ͨ����϶�����ƽ,�ɻ����Ի�ñȵ�һ������ƽ������С��ȫ������ȡ�
2.2 ����ȶ��������ܵ�Ӱ��ͨ�������Ż��ܹ���߷ɻ�����������,��ʽ(4)��ʾ,Ӱ�캽���Ż���������ذ�������ָ������Ʊ��������,����ȶԷɻ��������ܵ�Ӱ����Դ�����ȶ�����ָ������Ʊ���Ѱ�ŷ�Χ��Ӱ��2��������з�����
2.2.1 ����ȶ�����ָ���Ӱ�����Ѳ����,��ʽ(4)�е�1��ʽ����ʾ,����ָ�����������K�����ȡ��������������½���,���ڷɻ��Ǽ������ʱ�ĺ������ͨ������(�� < 15��)[16],���,��ʽ(5)��ʾ,����ָ��H�ķ��ӽ���Ϊ��Wf��V,��ֵ���ɷ����ٶ�V�뷢��������λ��������,����KӰ��;��ĸΪ��Ч�����仯�ʵľ���ֵ|?|,?��Ϊ�ɻ���λ������ʣ���,�����ʽΪ?=(Ta/W��1/K)V[12],TaΪ��������������������,? > 0,�� ?��K���������;�����½���,? < 0,��?��K�������С��
���,Ѳ���ε�����ָ�ꪧ�˪���K���������;���������½��ε�����ָ��H����K�ı���仯,��仯����������ָ��H�ķ��ž�����
2.2.2 ����ȶԿ��Ʊ���Ѱ�ŷ�Χ��Ӱ��ɻ���ijһ��������и߶���,�����÷����ٶ�Va.max����С���÷����ٶ�Va.min������������Ta.max����С��������Ta.min�Լ�ƽ����������TR��ͼ 3��ʾ��
 |
| ͼ 3 ���Ʊ���Ѱ�ŷ�Χ Fig. 3 Search range of control variable |
| ͼѡ�� |
����Ѳ����,���Ʊ���Ϊ�����ٶ�����и߶ȡ��ɻ�Ѳ��ʱӦ����Ta=TR,���,Ta.max��TR�Ľ��������Ѳ���ٶȵĿ��÷�Χ[VTD.min,VTD.max]���ɷɻ�ƽ�����������ļ���ʽTR=W/K��֪[12],�ɻ���������ʱ,ͼ 3��ƽ����������������K���������ƽ��,ʹTa.max��TR�Ľ�������Ӧ���ٶ�VTD.min��С��VTD.max���,��Ѳ���ٶȵ�Ѱ�ŷ�Χ����
�������������½���,���Ʊ���Ϊ�����ٶ������š���ͼ 3��ʾ,�����÷����ٶ�Va.max����С���÷����ٶ�Va.min������������Ta.max(��Ӧ�������)�Լ���С��������Ta.min(��Ӧ��С����)�����˷ɻ��ܵķ����ٶ������ſ��÷�Χ�����ڷɻ�����ʱӦ����Ta > TR,�½�ʱӦ����Ta<TR,���,�����������ٶ������ſ��÷�Χ��,Ta.max��TR�����������Ϊ�����εķ����ٶ������ſ��÷�Χ,Ta.max��TR������֮�������Ϊ�ɻ��½�ʱ�ķ����ٶ������ſ��÷�Χ������ͼ 3�е�ƽ����������������K���������ƽ��,���,����K��ʹ�����εĿ��Ʊ���Ѱ�ŷ�Χ����,��СK��ʹ�½��εĿ��Ʊ���Ѱ�ŷ�Χ����
��������,������ƽ��ʹ�ɻ���ȫ������ȷ����ı�,������Ӱ�캽���Ż��Ľ�������ݵ�1��,����Ѳ����,ͬʱ��������ָ������Ʊ���Ѱ�ŷ�Χ,�ܹ�ʹ�����Ż���ø��Ž�;�������������½���,��С����ָ�ꡢ������Ʊ���Ѱ�ŷ�Χ,�ܹ�ʹ�����Ż���ø��Ž⡣���,��������ƽ�����������ȱ仯�ܹ�ͬʱ������ָ������Ʊ���Ѱ�ŷ�Χ��������Ӱ��,����߷ɻ�����������;��ͬʱ������ָ������Ʊ���Ѱ�ŷ�Χ��������Ӱ��ʱ,���ͷɻ�����������;����������ָ������Ʊ���Ѱ�ŷ�Χ�еĶ���֮һ��������Ӱ��,����ֱ���ж�����ȱ仯�Ժ����Ż������Ӱ��,����ӷ���ԭ����һ������������ƽ�Էɻ��������ܵ�Ӱ�졣
3 ���ڶ�����ƽ�ĺ����Ż�������ͳ�ĺ����Ż�����������ϸ���Ƿɻ�������ƽ������,���,����ָ��Ľ��㡢���Ʊ���Ѱ�ŷ�Χ��ȷ���������˶�������ЧӦ��Ӱ�졣�ڴ�ͳ�����Ż������Ļ�����,ͨ���ڿ��Ʊ������������ƫ��,��������ƽ����Ϊ���ӵ�Լ������,���Եõ����ڶ�����ƽ�ķɻ��������к����Ż�����:
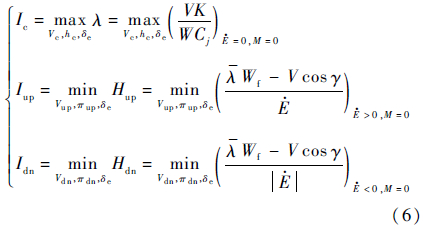
ʽ��:��eΪ�ɻ��ĸ���������棻MΪ���ء����1������,ȫ�������溽���Ż��������Ż�Ѳ���κ���,���Ż����������½��κ�������Ѳ����,�ɻ��ĵ�Ч�������ֲ���,��������ȼ�����Ķ���С,��˺����Ż�����Էɻ���ÿһ����״̬,�ڿ��Ʊ���Ѱ�ŷ�Χ��,�������Լ��������ʹ����ָ�����ﵽ�������ſ��Ʊ���,�ڴ˻�����,��������״̬����;�����������½���,�ɻ��ĵ�Ч����E�ֱ������ݼ�,��˺����Ż�����Էɻ�ÿһ��Ч����״̬,�ڿ��Ʊ���Ѱ�ŷ�Χ��,�������Լ�������ҷֱ�ʹ����ָ��Hup��Hdn�ﵽ��С�Ŀ��Ʊ���,�ڴ˻�����,��������״̬���������,�����Ρ�Ѳ�������½��εĺ����Ż�������ͼ 4��ʾ��
 |
| ͼ 4 �����Ż����� Fig. 4 Trajectory optimization flow |
| ͼѡ�� |
��Ѳ����Ϊ��,ͼ 4��ʾ���Ż���������Ҫ����ľ���˵������:
1) ���ɻ���������Χ�ָ�����ɼ���㡣
2) ȷ����ǰ������Ӧ�ķ��и߶ȡ������ٶ��Լ�����ƫת��������Χ��
3) ��?=0��M=0��ΪԼ������,�ֱ����ʹ����ָ��ﵽ�������ſ��Ʊ�����״̬�����Լ�������Ϸ�ʽ����ƽƫ�ȡ�
4) �����һ���������,�ظ�����2)�벽��3)��
5) �ɲ���3)ȷ��ÿһ����������״̬�����Լ�������Ϸ�ʽ����ƽƫ��,���ɵõ��ɻ����������й��̵����ź����������ƽ���ɡ�
4 �� ���Ե�1.2���������о�����Ϊ����,�ں����Ż�������,�ɻ�����2 400 kg,Ѳ���߶ȷ�ΧΪ10~12 km,Ѳ����������ΧΪ0.6~0.8,�����γ�ʼ����״̬���½������շ���״̬��Ϊh=0.1 km��Ma=0.2��������������,�����ɻ�������ƽ (����ͳ�����Ż�����)��ǰ����ƽ��������ƽ�Լ����������ƽ4�ַ�ʽ�µĺ����Ż������ͼ 5��ʾ��
 |
| ͼ 5 ���к����Ż���� Fig. 5 Flight trajectory optimization results |
| ͼѡ�� |
ͼ 5(e)��,��=100%����=30%�ֱ��ʾ�������������������������״̬����ͼ 5(a)��ͼ 5(b)��֪,4�ַ�ʽ�µķ��к��������Գ��������Ρ�Ѳ���μ��½���3�����н�,Ѳ���ξ�Ϊ��Ҫ�ķ��нΡ�����Ѳ���߶Ⱦ�ΪѲ���߶ȷ�Χ���ϱ߽�(hopt=12 km),����Ѳ����������ΪѲ����������Χ���ϱ߽�(Maopt=0.8)�� ��������4�ַ�ʽ�µĺ����Ż����,�����ɻ�������������� 1��ʾ��
�� 1 �����ɻ����������� Table 1 Endurance performance of example airplane
| ��ʽ | ������/kg | �ܺ���/km |
| ����ƽ | 2 400 | 3 821 |
| ǰ����ƽ | 2 400 | 3 482 |
| ������ƽ | 2 400 | 3 583 |
| ���������ƽ | 2 400 | 3 742 |
��ѡ��
��� 1��ʾ,3�ֶ�����ƽ��ʽ�µĺ��̾�С������ƽ��ʽ�µĺ��̡��������ڷɻ���ʵ�ʷ���ʱ,��Ҫƫת�����Ա��������ش���ʵʱƽ��״̬�����ɻ��������������ͨ�������Ż����,������ƫתʱ,�����ή�ͷɻ��������������,��ͼ 3��ʾ������,���������ɻ�,Ѳ��������Ҫ�ķ��н�,Ѳ��������������ɻ���ȫ�����������ء����,�����������ƽ,���Ƕ�����ƽʱ�ĺ��̼�������С,������ӽ��ڷɻ�ʵ�ʵ��������ܡ�
�ں����Ż�������,�����ɻ���ǰ����ƽ��������ƽ�Լ����������ƽ�µ�����ָ��������ȷֱ���ͼ 6��ͼ 7��ʾ��
 |
| ͼ 6 3����ƽ��ʽ�µ�����ָ�� Fig. 6 Performance indexes under three trimming modes |
| ͼѡ�� |
 |
| ͼ 7 3����ƽ��ʽ�µ������ Fig. 7 Lift-drag ratios under three trimming modes |
| ͼѡ�� |
�ں����Ż�������,Ѳ����������Ϊ����,���������½���������Ϊ���������,�ڷ�������,Ѳ���κ�����Ϊ�ɻ�����m,��ͼ 6(a)��ͼ 7(a)��ʾ;���������½��κ�����Ϊ�ɻ���Ч����E,��ͼ 6(b)��(c)��ͼ 7(b)��(c)��ʾ��
��ͼ 6���Կ���,��3�ֶ�����ƽ��ʽ��,���������ƽ��ʽ�µ�Ѳ��������ָ�������,����������ָ��Hup���½�������ָ��Hdn����С,��ͨ�����������ƽ,�����ɻ��ܹ���Ѳ���λ������ȼ�����,ͬʱ�����������½��θ�����С�ijɱ������ 1��ʾ,����ڵ�һ������ƽ,���Ŷ��������ƽ�ܹ�ʹ�����ɻ����ܺ��̷ֱ����7.5%��4.4%��
�Ա�ͼ 7��3����ƽ��ʽ�µ�����ȿ�֪,���Ŷ��������ƽ��ʽ��,�ɻ��������Ρ�Ѳ���Ρ��½���ǰ�ڵ�ȫ������Ⱦ����,���½��κ��ڵ�ȫ���������С����������:
����Ѳ����,���2.2������,���������K�ܹ�ͬʱ��������ָ��������Ʊ���Ѱ�ŷ�Χ,�Ӷ�ʹ�����Ż���ø��Ž�,��߷ɻ����������ܡ�
����������,����ָ��Hup������,��ͼ 6(b)��ʾ�����2.2������,Hup�ķ��Ӳ���KӰ��,��ĸ��K���������,�ҿ��Ʊ���Ѱ�ŷ�Χ��K������������,����K�ܹ�ͬʱ������ָ������Ʊ���Ѱ�ŷ�Χ��������Ӱ��,ʹ�����Ż���ø��Ž�,�Ӷ���߷ɻ����������ܡ�����,�ӷ���ԭ���ĽǶ�,���ݵ�1��,�����ε�����ָ�꼴Ϊ�ɻ��������ɱ�,��ֵ�ɷɻ�����������Ѳ���ε�ȼ�;����Ծ�����Ϊ�˻����ѵ�Ѳ������,�ɻ�ͨ������ȼ�;�������ߵķ���״̬�½���Ѳ�������,�����������,Ѳ���ε�ȼ�;����Ը���,��Ѳ���ζԷɻ����������ܸ�Ϊ�������������Ƿɻ��ĵ�Ч�����ӳ�ʼֵEi������Ec�Ĺ���,��Ч�����仯��?��Ӱ��ɻ�����������̵ķ���ʱ��������������2.2������,��������,?��K���������,���,����K����ʹ�ɻ�����������������,Ϊ��Ѳ�����ܸ�������Ѳ���ν�ʡ����Ŀ���ȼ��,�Ӷ���߷ɻ����������ܡ�
���½���ǰ��,����ָ��HdnС����,��ͼ 6(c)��ʾ�����2.2������,Hdn�ķ��Ӳ���KӰ��,��ĸ��K�������С,������ָ����K�������С��Ȼ��,K�����¿��Ʊ���Ѱ�ŷ�ΧҲ��С�����,K�ı仯���ܹ�������ָ������Ʊ���Ѱ�ŷ�Χ�еĶ���֮һ��������Ӱ��,��ʱ����ͨ����������ȶԺ����Ż������Ӱ�����ж�����������ܵ�Ӱ�졣����,�ӷ���ԭ���ĽǶ�����,�ɻ����½���ǰ�ھ��нϸߵ���������,��ʱͨ��ֱ����������ת��Ϊ����,�ܹ�ʹ�ɻ�����Խϵ͵��ͺļ������ֽϸߵķ����ٶ�,��ͼ 8��ʾ,�Ӷ���ñ�Ѳ���θ��ߵ�ȼ�;����ԡ����,�����Ѳ����,�½���ǰ�ڶԷɻ����������ܸ�Ϊ������������������,�½��εĵ�Ч�����仯�ʵľ���ֵ|?|��Ӱ��ɻ��½����̵ij��̡����2.2������,���½���,|?|��K�������С,���,���½���ǰ������K�����ӳ���һ���й���,�Ӷ���߷ɻ����������ܡ�
 |
| ͼ 8 ���������ƽ�µķ��к����ֲ���ͼ Fig. 8 Local views of flight trajectory under optimum combined trimming mode of control surfaces |
| ͼѡ�� |
���½��κ���,����ָ��Hdn������,��ͼ 6(c)��ʾ������Hdn�ķ��Ӳ���KӰ�죬��ĸ��K��С������,�ҿ��Ʊ���Ѱ�ŷ�Χ��K��С������,���,��СK�ܹ�ͬʱ������ָ������Ʊ���Ѱ�ŷ�Χ��������Ӱ��,ʹ�����Ż���ø��Ž�,�Ӷ���߷ɻ����������ܡ�����,�ӷ���ԭ���ĽǶ�����,���½��κ���,���ŷɻ��ĵ�Ч��������,��ʱ�ɻ���Ȼ��Ȼ���Ա�����Խϵ͵��ͺ�״̬,���Ѿ�����������ת��ʹ�ɻ���ýϸߵķ����ٶ�,��ͼ 8��ʾ�����,������������,�½��κ��ڵ�ȼ�;����Խ�����Ѳ���ε�ȼ�;�����,��������½��κ���,Ѳ���ζԷɻ����������ܸ�Ϊ��������ʱͨ����СK,�ܹ�ʹ�ɻ����������½��κ��ڵķ��й���,Ϊ��Ѳ�����ܸ�������Ѳ���ν�ʡ����Ŀ���ȼ��,�Ӷ���߷ɻ���Ѳ�����ܡ���ͼ 8(a)��ʾ,������½���ǰ��,�ɻ����½��κ��ڵĺ������Ա䶸,��������½���
��������,ͨ�����������ƽ,ʹ�ɻ��������Ρ�Ѳ���Ρ��½���ǰ�ڵ����������,���½��κ��ڵ�����ȼ�С,�ܹ���߷ɻ����������ܡ�
5 �� ��1) ͨ������������ƽ�Էɻ��������ܵ�Ӱ��,����˻��ڶ�����ƽ�ķɻ��������к����Ż��������÷����ܹ���ø��ӽ��ڷ��ӷɻ�ʵ��DZ�������ź�������̡�
2) �����ɻ����Ż��������:���ڶ�����沼�ַɻ�,ͨ���÷����ܹ�ȷ�������ŵĶ��������ƽ���ɡ�����ڵ�һ������ƽ,�������Ŷ��������ƽ�ܹ�ʹ�����ɻ����ܺ���������7.5%��
3) �������Ρ�Ѳ���μ��½���ǰ������ȫ�������,���½��κ��ڼ�Сȫ�������,��������߷ɻ����������ܡ�
�����
| [1] | HUANG G Q,LU Y P,NAN Y.A survey of numerical algorithms for trajectory optimization of flight vehicles[J].Science China Technological Sciences,2012,55(9):2538-2560. |
| Click to display the text | |
| [2] | RIVAS D,FRANCO A,VALENZUELA A.Optimization of unpowered descents for commercial aircraft:AIAA-2011-7019[R].Reston:AIAA,2011. |
| Click to display the text | |
| [3] | CHERN J S,LIU Y C,CHEN C S.Investigation of maximum range cruise flight for B787:AIAA-2010-7809[R].Reston:AIAA,2010. |
| Click to display the text | |
| [4] | SHAPIRA I,BEN-ASHER J.Range maximization for emergency landing after engine cutoff[J].Journal of Aircraft,2005,42(5):1296-1306. |
| Click to display the text | |
| [5] | LI X,NAIR P B,ZHANG Z G.Aircraft robust trajectory optimization using nonintrusive polynomial chaos[J].Journal of Aircraft,2014,51(5):1592-1603. |
| Click to display the text | |
| [6] | NG H K,SRIDHAR B,GRABBE S.Optimizing aircraft trajectories with multiple cruise altitudes in the presence of winds[J].Journal of Aerospace Information Systems,2014,11(1):35-47. |
| Click to display the text | |
| [7] | ����,������,�ܽ�.���˷�������������켣�Ż�[J].����������Ӧ��,2013,30(1):31-36. CHEN X,WANG X M,ZHOU J.Optimization of vertical profile trajectory for unmanned aerial vehicle[J].Control Theory & Applications,2013,30(1):31-36(in Chinese). |
| Cited By in Cnki (1) | Click to display the text | |
| [8] | FLANZER T C,BOWER G C,KROO I M.Robust trajectory optimization for dynamic soaring:AIAA-2012-4603[R].Reston:AIAA,2012. |
| Click to display the text | |
| [9] | MUELLER R.Multi-objective optimization of an aircraft trajectory between cities using an inverse model approach:AIAA-2012-4489[R].Reston:AIAA,2012. |
| Click to display the text | |
| [10] | VALENZUELA A,RIVAS D,FRANCO A.Cruise optimization using trajectory patterns:AIAA-2010-9140[R].Reston:AIAA,2010. |
| Click to display the text | |
| [11] | SACHS G,LENZ J,HOLZAPFEL F.Trajectory optimization for maximizing the range of powered sailplanes with retractable propeller:AIAA-2009-5626[R].Reston:AIAA,2009. |
| Click to display the text | |
| [12] | ����ƽ,����,�����.���շ��������ж���ѧ[M].����:�������պ����ѧ������,2005:26-30,34,43. FANG Z P,CHEN W C,ZHANG S G.Aircraft flight dynamics[M].Beijing:Beihang University Press,2005:26-30,34,43(in Chinese). |
| [13] | WANG G,HU Y,WU C,et al.Improving performance of flying wing UAV with propeller thrust involved trimming the pitching moment:AIAA-2013-4421[R].Reston:AIAA,2013. |
| Click to display the text | |
| [14] | �܈�,������.���;���������ķ��к����Ż�[J].�������պ����ѧѧ��,2010,36(6):654-658. ZHOU K,WANG L X.Vertical flight trajectory optmization of heavy military airlift aircraft[J].Journal of Beijing University of Aeronautics and Astronautics,2010,36(6):654-658(in Chinese). |
| Cited By in Cnki (3) | Click to display the text | |
| [15] | WU S F,GUO S F.Optimum flight trajectory guidance based on total energy control of aircraft[J].Journal of Guidance,Control and Dynamics,1994,17(2):291-296. |
| Click to display the text | |
| [16] | CAVCAR A.Climb performance of piston-propeller airplane with cambered wing and variable propeller efficiency[J].Journal of Aircraft,2011,48(5):1701-1707. |
| Click to display the text |
