��������,����һֱ������Ѱ��ʱ����ϵͳȫʱ���ȶ��Ĵ����о�,��ȡ���˲��ٽ�չ.��Ԫѫ������[1]�е�1�ν����ͺ��άϵͳ��ȫʱ���ȶ��о��ɳ�Խ��ʽ�ļ���ת��Ϊ������ʽ�ļ���,����n=1,2(nΪ������ʱ����ϵͳ��ά��)�����ξ���������ж�����,��Ȼ�˷����Ը�ά���δ���������������.������[2]��,��Ԫѫ����Ԫ�����Newton���ƹ�ʽ,�Ե�ʱ��n=2�����������������о�.����[3]������һ�����Զ���ʱ��ϵͳȫʱ�ͽ����ȶ��ij�ִ����о�.����[4, 5]�о��˵�ʱ������ϵͳ�����ȶ��Ĵ����о�;������[5]�Ļ�����,����[6]�����˶�ʱ������ϵͳ�����ȶ��ԵĴ����о�.����[1, 2, 3, 4, 5, 6]�еķ������������ϵͳ,����ʹ�ô�ͳ����ѧ�Ƶ�����.ģ����������Ķ���ϵͳͨ���Ƿ����Ե�,��Ϊ����,���ô�ͳ����ѧ�������ѷ������ȶ���,��Ҫ�������Ƚ��ļ��㷽������.���ż������ѧ�뼼���ķ�չ,�Ծ�ȷ����Ϊ�ص�ķ��ż������������,Ч��Ҳ�����,��Ϊ��ֵ�����һ��ǿ���������.
��Ժ������ķ���������ϵͳ,���ĸ���ʱ����ϵͳȫʱ���ȶ��ԵĴ����о�,�о�������÷��ż��㷽��������ά����ϵͳ��ƽ���Ľ����ȶ���.����[7, 8]��������ô���������������ϵͳ�ȶ��Ժͷֲ���������㷨������,���Ҹ���������ʵ�ּ�ʵ����.��ͬ�ڴ�ͳ����ѧ�Ƶ�,���ż���ʹ���������ϵͳ���ȶ��Ժͷֲ����ӳ����Զ���.���������߹����Ļ�����,��һ���о�������÷��ż��㷽��,������[9]�е����Ƿֽ⡢����[10, 11]�е�Gr��bner��������[12]�е�ʵ�����ȷ���,���ط�������ϵͳȫʱ���ȶ���.
1 ʱ����ϵͳ��ƽ�����ȶ��Կ�������nά�����Զ�ʱ����ϵͳ��
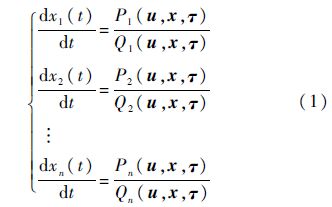
ʽ��:P1,P2,��,Pn,Q1��0,Q2��0,��,Qn��0Ϊ����ʽ;u=(u1,u2,��,um)Ϊ����;x=(x1(t),x2(t),��,xn(t))��RnΪ��Ԫ;��=(��,2��,��,k��)Ϊϵͳ��ʱ��,�ӡ�R+=[0,��)Ϊʱ��;n��m��kΪ������.
Ϊ�˼���ʽ(1)����ƽ���,���=0,�ɵ�
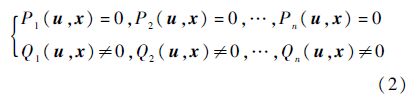
�ó��Ľ⼴Ϊƽ���x*.�����ϵͳ(1)����ƽ���֮��,��Ҫ������ƽ���x*�����ȶ���.���ڸ�ϵͳ�Ƿ�������ʽ,������������Ի�.�����ף�13],���Ի�֮���ϵͳ���Ľ����ȶ����������ϵͳ��ƽ���Ľ����ȶ���һ��.
��y=x��x*,����ʽ(1)��,x*��ϵͳ����ƽ���,����ʽ(2),�ɵ����Ի�֮���ϵͳ:

ʽ��:A,Ak��Rn��nΪ����.
ʽ(3)����������Ϊ

ʽ�У�IΪn��n��λ������Ϊ����ֵ.���������̵ĸ��ԪЦӡ�R+�����и�ʵ��,��ô����⽥���ȶ�,��ʽ(3)ϵͳȫʱ���ȶ�.���,ʽ(1)ϵͳ��ƽ���Ľ����ȶ��Եȼ���ʽ(3)ϵͳ����ȫʱ������.
2 ʱ��ϵͳȫʱ���ȶ��Ĵ����о�ʱ����ʽ(3)ϵͳ��ȫʱ���ȶ���,������ʽ��(��,��)��∀�ӡ�R+��Hurwitz�ȶ�.������[14],��
����1 ʽ(3)ϵͳȫʱ���ȶ��ij�ֱ�Ҫ����Ϊ
1) det[��I��A��$\sum\limits_{k=1}^{n}{{{A}_{k}}}$]=0���ĸ����и�ʵ��.
2) ��∀��>0������ʵ��y,����

����.����,x*Ϊʽ(2)�����ƽ��㣻iΪ������λ.
��������1):�����ʽMΪ
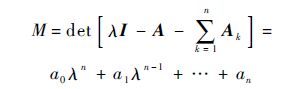
�ڴ˻�����,����M��Hurwitz����:

����:��i>nʱ,ai=0.H��˳������ʽ��1,��2,��,��nΪM��Hurwitz����ʽ.��������[15]Routh-Hurwitz�о�,����ʽM���ȶ���,���ҽ���������������:

��������2):��∀��>0������y,��

����.������[14],�y��=��,�������ȼ���:��∀����[0,2��]>0������ʵ��y��R��{0},��

����.����ʽ���Ա任
����2)�ȼ���:��∀z��R������ʵ��y��R��{0},����

����.�ڴ�,��

��h(u,z,y)=0����ʵ�����鲿�ɵ�

ʽ��:f��gΪ����z��y��ʵϵ����������Ԫ����ʽ,z��R,y��R��{0};Re��ImΪʵ�����鲿.����2)�ȼ���ʽ(4)��ʵ��.�ɴ�,�ɵ÷����Զ�ʱ����ϵͳȫʱ���ȶ��ij�Ҫ����.
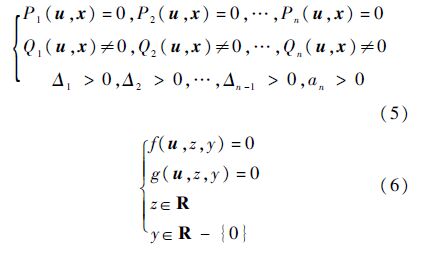
����2 ʽ(1)ϵͳ��ƽ���ȫʱ���ȶ��ij�ֱ�Ҫ������ʽ(5)ϵͳ����ʵ����ʽ(6)ϵͳ��ʵ��:
3 ��������������2����������ν�ʱ��ϵͳ��ȫʱ���ȶ������⻯Ϊ��������,���ォ�о���ν���������Ӧ�õ������Щ����������.
����1 ��������ϵͳ.
����ʵ��������ʽ(1)ϵͳ��ģ��,ͨ������ɵõ�������ʽ���̼�����ʽ��ʽ(5)ϵͳ��ʽ(6)ϵͳ.��Ԫx������u����������һЩʵ�������еĸ���Լ��:

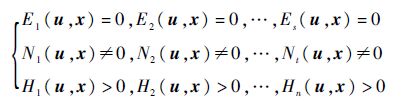
ʽ��:s,t��n.��Լ������ʽ(7)�ӵ�ʽ(5)ϵͳ��ʽ(6)ϵͳ��,�ɵ���������ʽ������ʽ��ϵͳ,��֮Ϊ�����ϵͳ.һ���,������ϵͳ������:
����2 ����������.
ͨ�������л�Gr��bner������,���Ѷ���ʽ��E={E1,E2,��,Es}���ǻ�,�õ�������Tk.������u����,ת������4.
����3 ����������.
�������u������,�����ó��ȿ�����С����������������ÿ��Tk��ʵ���.��F={N1,N2,��,Nt,H1,H2,��,Hn}Ϊ����ʽ����ʽ��.Ȼ��F�еĶ���ʽ��ÿ��ʵ����ϵķ��ſ���ͨ��������������������Ķ˵��ֵ��ȷ��.�ɴ˵õ��������������İ����ϵͳ����ʵ��.
����4 ʵ�����.
�������u����,��F����ÿ��������Tk,������F������һ������u�Ĵ�����V,ʹ���佫ʵ�����ռ�Rm��Ϊ�������ǻ,������ÿ����ǻ��,Tk��ʵ�������Լ�F����Щ��㴦�ķ��Ų���.��ÿ����ǻ��ȡһ������������,����Tk��ȥ����,�ɲ���3�ɼ���Tk��ʵ����Լ�F�ڸ�������ķ���.
����5 �����������,���ݶ���ʽ��������ָ��������ʵ��İ�ǻ�������㴦�ķ���,��������u����Ҫ���������.
������[16]ʵ���������DISCOVERER�Ļ�����,�㷨����(��ͼ 1)����MAPLE��ʵ��.
 |
| ͼ 1 �������������㷨����Fig. 1 Algorithmic steps using algebraic approaches |
| ͼѡ�� |
4 Ӧ��ʵ��4.1 ʵ����֤����[13]�н�����һ����Ҫ������ģ��:Lotka-Volterra��ʳ-ʳ��ϵͳ.Ϊ����֤�����д��������Ŀ�����,ʹ������IJ�ʳ-ʳ��ϵͳ��ʾ���÷��ż��㷽������ȫʱ���ȶ��Ե�����.�ڴ�,�������µ�ʱ�͵IJ�ʳ-ʳ��ϵͳ:
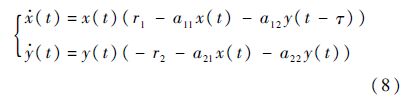
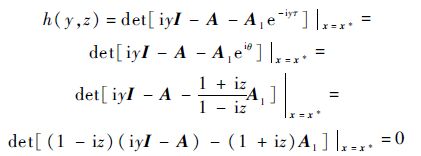
ʽ��:x(t)>0��y(t)>0Ϊʳ������ʳ�ߵ���Ⱥ�ܶ�;r1>0��r2>0Ϊʳ������ʳ�ߵ�����������;aii(i=1,2)>0Ϊ����Ⱥ�ܶ����õ���Ⱥ������ϵ��;aij(i��j)>0Ϊ����Ⱥ����õ���Ⱥ������ϵ��;����0Ϊ��ʳ�ߵ���ʱ��.�����������ϵͳ��ƽ��㴦�ȶ��ij�Ҫ����.
��1�� ������ƽ��㼰���Ի�.
����=0,��ôƽ�������ɻ�Ϊ

���ɴ���õ���ƽ���x*=(x*,y*).
����2��2��Jacobian����
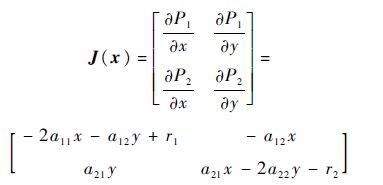
ʽ(8)ϵͳ��дΪ������ʽ:

����G�Ƿ�������,���Բ���Ϊ

ʽ�У�
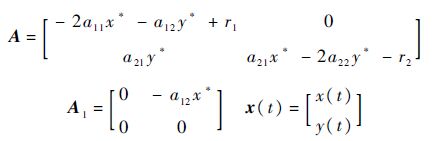
��2�� ��������1).
��2������1�е�����1)��det[��I��A��A1]=0�����и�ʵ��,�ڴ�,

ʽ��:
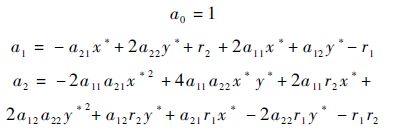
�ɶ���ʽϵ��a0��a1��a2��ɵ�Hurwitz�о�
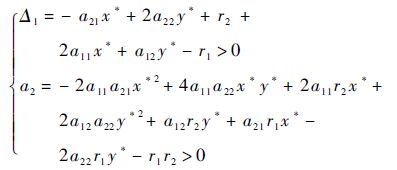
�ʶ�,�ɵð����ϵͳ
����MAPLE��ʵ�ֵĵ�3���е��㷨���ð����ϵͳ�ɵ�

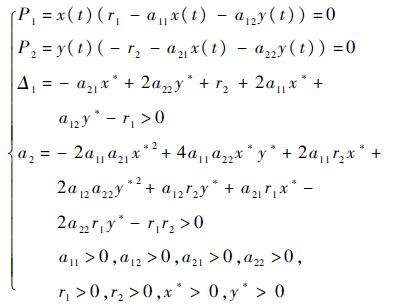
��3�� ��������2).det[iyI��A��A1e��iy��]x=x*��0����.
��ʵ��.
����h(y,z)��ʵ�����鲿�ɵð����ϵͳ

��ʵ��.
���ð����ϵͳ�ɵ�

����ʱ,ϵͳ��ʵ��.
���Ͽɵ�,����������
ʱʽ(8)ϵͳ��ƽ��㴦ȫʱ���ȶ�.
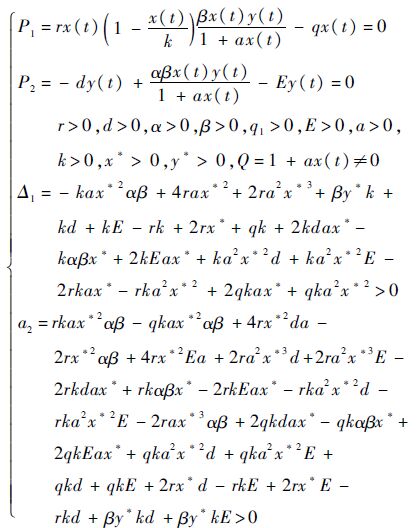
4.2 ��ѡ���ԵIJ�ʳ-ʳ��ϵͳ����[17]�е���ѡ���ջ��Lotka-Volterra��ʳ-ʳ��ϵͳҲ��һ����Ҫ����ѧ����ģ��.�������¶�άϵͳ:
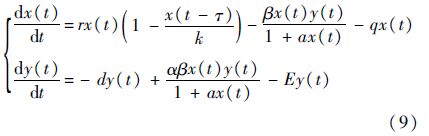
ʽ��:r(1��x/k)(r,k>0)Ϊ��ʳ��ʱʳ����������;��x/(1+ax)(��,a>0)Ϊ��ʳ�ߵ���Ӧ����;d>0Ϊ��ʳ�ߵ�������;��>0Ϊת��ϵ��;qx��Ey(q,E>0)�ֱ�Ϊʳ���Ͳ�ʳ�ߵ��ջ���.���4.1�ڵķ������ƿ��Խ��ʽ(9)ϵͳ��ȫʱ���ȶ�������.
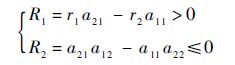
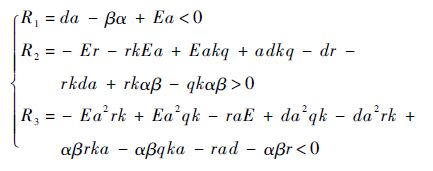
��1�� �������Ի�������Hurwitz�оݿɵð����ϵͳ,������1):
���ð����ϵͳ�ɵ�
��2�� ��������2).

��ʵ��.
����h(y,z)��ʵ�����鲿�ɵð����ϵͳ

��ʵ��.
f(y,z)��g(y,z)���Ǻ��в����ͱ����Ķ���ʽ.�� 1����f(y,z)��g(y,z)����������ߴ���,������ʹ�ô�ͳ����ѧ���㷽�����ѵó����,�����÷��ż��㷽���ڼ���֮��,�ɵ�

����ʱ,ϵͳ��ʵ��.
�� 1 f(y,z)��g(y,z)����������ߴ���Table 1 Number of terms and higher degree of f(y,z) and g(y,z)
| ����ʽ | ���� | ��ߴ��� |
| f(y,z) | 62 | 9 |
| g(y,z) | 44 | 8 |
��ѡ��
����,����������
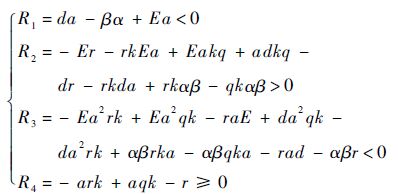
ʱ��ʽ(9)ϵͳ��ƽ��㴦ȫʱ���ȶ�.
4.3 SIR��Ⱦ��ģ��SIR��Ⱦ��ģ����һ����Ҫ������ģ��,Cooke������[18]�������ʱ��SIR��Ⱦ��ģ��,��ָ��tʱ�̵Ĵ�Ⱦ����Ϊ��S(t)I(t���ӡ�),����,��>0Ϊÿ��ÿ����Ⱦ�߽Ӵ�������,�ӡ���0Ϊ�����ڱ���Ⱦ�����ڵ�����ʱ��.����[19]��ʱ��SIR��Ⱦ��ϵͳΪ
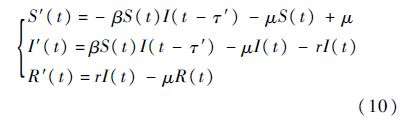
ʽ��:��>0Ϊ������;r>0Ϊ�ջָ�����.
��1�� ���켰��������1).
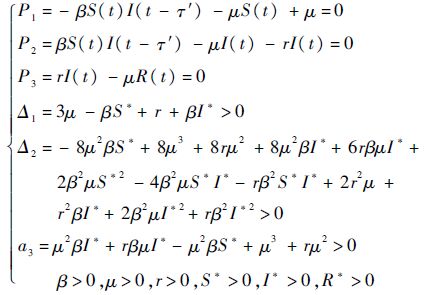
����ɵ�

��2�� ��������2).
����h(y,z)��ʵ�����鲿�ɵð����ϵͳ<

����:f(y,z)��30��,��ߴ�����7;g(y,z)��29��,��ߴ�����7.ͨ������ɵò���ȡ����ֵʱ��ϵͳ����ʵ��.
���,����������R1=�£��̣�r>0��ʱ,ʽ(10)ϵͳ��ƽ��㴦ȫʱ���ȶ�.
5 �� �۱�����Gröbner�������ǻ��ֽ��ʵ�����ȷ��ż���ԭ�������������һ���µ���֤����ϵͳȫʱ���ȶ��Ե��㷨.
1) ��ʵ����֤�������㷨��ʵ�ֽ�Ϊ����ļ�������,������㺬��62��Ķ���ʽ����ʱ�����Ϊ����,���Ǵ�ͳ����ѧ�������ﲻ����.
2) ����,���ڽ��������ʱ����ϵͳ��ȫʱ���ȶ��Է������㷨�о���ʵ��.
�����
| [1] | ��Ԫѫ.��ʱ�͵�ϵͳ���������ȶ���[J].��ѧѧ��,1960,10(1):125-142. Chin Y S.Unconditional stability of systems with time lags[J].Acta Mathematica Sinica,1960,10(1):125-142(in Chinese). |
| Cited By in Cnki (10) | Click to display the text | |
| [2] | ��Ԫѫ,��Ԫ��.һ��ʱ����ϵͳ�������ȶ�������[J].����������Ӧ��,1984,1(1):23-35. Chin Y S,Yu Y H.Unconditional stability conditions for a class of differential systems with time delay[J].Journal of Control Theory and Applications,1984,1(1):23-35(in Chinese). |
| Cited By in Cnki (6) | Click to display the text | |
| [3] | �ܳ�˳,�˾���.���Զ���ʱ��ϵͳȫʱ�ͽ����ȶ��ij�ִ����о�[J].�Զ���ѧ��,1990,16(1):62-65. Zhou C S,Deng J L.A sufficient algebra criteria for stability of linear constant time-delay system[J].Acta Automatica Sinica,1990,16(1):62-65(in Chinese). |
| Cited By in Cnki (2) | Click to display the text | |
| [4] | Cao D Q,He P,Ge Y M.Simple algebraic criteria for stability of neutral delay-differential systems[J].Journal of the Franklin Institute,2005,342(3):311-320. |
| Click to display the text | |
| [5] | Hu G D,Hu G D,Cahlon B.Algebraic criteria for stability of linear neutral systems with a single delay[J].Journal of Computational and Applied Mathematics,2001,135(1):125-133. |
| Click to display the text | |
| [6] | He P,Cao D Q.Algebraic stability criteria of linear neutral systems with multiple time delays[J].Applied Mathematics and Computation,2004,155(3):643-653. |
| Click to display the text | |
| [7] | Niu W,Wang D.Algebraic analysis of bifurcation and limit cycles for biological systems[M].Berlin,Heidelberg:Springer,2008:156-171. |
| Click to display the text | |
| [8] | Niu W,Wang D.Algebraic approaches to stability analysis of biological systems[J].Mathematics in Computer Science,2008,1(3):507-539. |
| Click to display the text | |
| [9] | Wang D.Elimination methods[M].Berlin,Heidelberg:Springer,2001:193-224. |
| >Click to display the text | |
| [10] | Buchberger B.Gröbner bases:An algorithmic method in polynomial ideal theory[J].Multidimensional Systems Theory,1985:184-232. |
| Click to display the text | |
| [11] | Faugère J C.A new efficient algorithm for computing Gröbner bases (F4)[J].Journal of Pure and Applied Algebra,1999,139(1):61-88. |
| Click to display the text | |
| [12] | Yang L,Xia B.Real solution classification for parametric semi-algebraic systems[C]//Algorithmic Algebra and Logic[S.l.:s.n.],2005:281-289. |
| Click to display the text | |
| [13] | ������,��ï��,κ����.��ʱ�Ͳ�ʳ-ʳ��ϵͳ��ƽ�����ȶ��Լ�ȫ��Hopf��֧[J].��ѧ�꿯:A��,2005,25(6):783-790. Song Y L,Han M A,Wei J J.Stability and global Hopf bifurcation for a predator-prey model with two delays[J].Chinese Annals of Mathematics:Series A,2005,25(6):783-790(in Chinese). |
| Click to display the text | |
| [14] | Bhattacharyya S P,Chapellat H,Keel L H.Robust control-the parametric approach[M].New York:Prentice Hall PTR,1995:446-472. |
| Click to display the text | |
| [15] | Lancaster P,Tismenetsky M.The theory of matrices:With applications[M].Pittsburgh:Academic Press,1985:89-103. |
| Click to display the text | |
| [16] | Xia B.DISCOVERER:A tool for solving semi-algebraic systems[J].ACM Communications in Computer Algebra,2007,41(3):102-103. |
| Click to display the text | |
| [17] | Kar T K,Pahari U K.Non-selective harvesting in prey-predator models with delay[J].Communications in Nonlinear Science and Numerical Simulation,2006,11(4):499-509. |
| Click to display the text | |
| [18] | Cooke K L.Stability analysis for a vector disease model[J].Journal of Mathmatics,1979,9(1):31-42. |
| Click to display the text | |
| [19] | Meng X,Chen L,Wu B.A delay SIR epidemic model with pulse vaccination and incubation times[J].Nonlinear Analysis:Real World Applications,2010,11(1):88-98. |
| Click to display the text |
