 |
| 图 1 光纤陀螺轨迹测量系统组成Fig. 1 Components of fiber optic gyroscope (FOG)-based trajectory surveying system |
| 图选项 |
井下部分主要包括光纤陀螺测斜仪、遥传短节、扶正器等辅助设备.光纤陀螺测斜仪是测量系统的核心,由二次电源、惯性测量单元(Inertial Measurement Unit,IMU)、导航计算机和数据传输模块等组成[13].测量过程中三轴光纤陀螺敏感仪器角运动信息,三轴加速度计敏感仪器线运动信息,采用惯性导航原理实时解算出井眼轨迹姿态(方位角、倾斜角和自转角)和位置信息(经度、纬度和高度).2 组合测量误差模型 2.1 惯性测量系统误差模型 惯性测量系统速度、姿态及位置的真值与测量误差的关系[14, 15]为
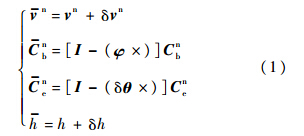
式中:vn为惯性测量计算所得速度;vn为真实速度;δvn为速度误差,上标n表示变量定义在导航坐标系中;Cnb为惯性测量计算所得姿态捷联矩阵;Cnb为无误差的捷联矩阵真实值;φ为姿态误差;I为单位矩阵;Cne为惯性测量计算所得从地球坐标系到导航坐标系的转换矩阵;Cne为从地球坐标系到导航坐标系的转换矩阵真实值;δθ为位置误差;h为导航计算所得高度值;h为高度真实值;δh为高度误差.依据式(1),展开推导可得惯性测量系统误差模型:
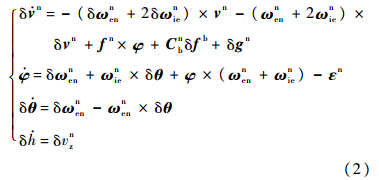
式中:ωnen为位置角速率;ωnie为地球转速;δωnen为位置角速率误差;δωnie为地球转速误差;fn为加速度计输出的比力;δfb为比力误差;δgn为地球重力加速度;εn为陀螺零偏;δvzn为垂直方向的速度误差. 2.2 电缆长度测量模型在实际测量过程中,电缆长度数据由光电编码计数器获取,其基本原理是电缆带动绞盘齿轮旋转,引起齿轮角度变化,从而得到电缆运行长度,考虑光电编码计数器刻度误差,则电缆长度的表达式为

式中:ld(t)为t时刻测量的电缆长度;δKd为光电编码计数器刻度误差;Kd为光电编码计数器刻度系数;Pd(t)为t时刻脉冲计数.3 组合测量算法设计 3.1 组合测量算法总体设计电缆长度信息包含了仪器运行轨迹的位置信息,匹配惯性测量系统与电缆长度所包含的位置信息,采用卡尔曼滤波实现信息融合与误差估计,利用闭环状态反馈实时修正惯性器件(陀螺和加速度计)和导航参数(姿态、速度和位置)误差,实现长时间、高精度井眼轨迹姿态/位置信息连续测量.组合测量算法如图 2所示.
 |
| 图 2 组合测量算法示意图Fig. 2 Schematic diagram of integrated surveying algorithm |
| 图选项 |
3.2 组合测量模型建立 测井过程中,仪器动态相对较低,惯性器件(陀螺、加速度计)误差可简化表示成零偏与高斯白噪声之和[16].将陀螺零偏和加速度计零偏模型定义为一阶马尔科夫过程[17]:
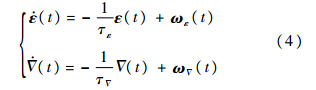
式中:ε(t)为陀螺零偏;Δ(t)为加速度计零偏;τε和τΔ分别为陀螺和加速度计相关时间常数;ωε(t)和ωΔ(t)分别为陀螺和加速度计高斯白噪声.光电编码计数器的刻度系数误差可视为随机常值误差,即满足:

联立式(2)、式(4)和式(5),光电编码计数器和惯性测量系统组成的组合测量系统状态方程在东北天坐标系下可表示为

式中:F(t)为状态转移矩阵;X(t)为16维误差状态向量;W(t)为系统噪声向量.X(t)和W(t)的表达式如下:
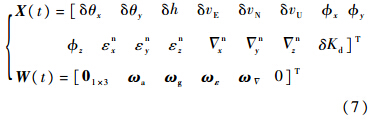
式中:δθx、δθy和δh为位置误差分量;δvE、δvN和δvU为速度误差δv的分量;φx、φy和φz为姿态误差φ的分量;εnx、εny和εnz为陀螺零偏分量;Δnx、Δny和Δnz为加速度计零偏分量;ωa为加速度计噪声;ωg为陀螺噪声. 3.3 量测方程建立光电编码计数器输出电缆长度信息转换成地理位置信息(经度、纬度和高度)与光纤陀螺惯性测量系统输出的位置信息进行匹配比较,完成组合测量(图 2所示),因此需要先建立电缆长度信息与地理位置信息的关系.图 3(a)中红色曲线为井眼轨迹示意图,图 3(b)为测量点i与地理位置关系示意图.井眼轨迹上第i-1个测点在井口坐标系下的坐标为(xi-1,yi-1,zi-1),对应的地理坐标为(λi-1,Li-1,hi-1),电缆长度信息为li-1,倾斜角为θi-1,方位角为ψi-1;同理,第i个测点在井口坐标系下的坐标为(xi-1,yi-1,zi-1),对应的地理坐标为(λi,Li,hi),电缆长度信息为li,倾斜角为θi,方位角为ψi.
 |
| 图 3 井眼轨迹及参数示意图Fig. 3 Chart of trajectory and parameters |
| 图选项 |
从图 3(b)可得到关系式:
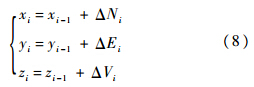
测量过程中,运行速度相对较慢(一般小于2m/s),组合算法滤波周期为1s,因此可以把相邻两测点之间的轨迹近似为直线,则有
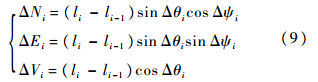
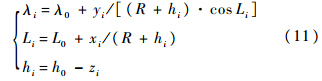
式中:Δθi=(θi+θi-1)/2;Δψi=(ψi+ψi-1)/2.合并式(3)、式(8)和式(9)可得第i个测量点在井口坐标系下的参数:
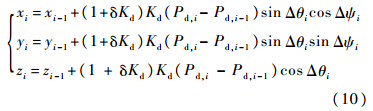
假设井口地理坐标为(λ0,L0,h0),则测量点i处的地理参数为
式中:R为地球半径.则量测方程表示为
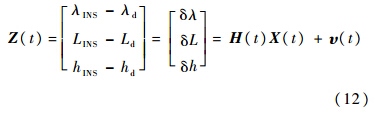
式中:λINS、LINS和hINS为纯惯导解算所得位置信息;λd、Ld和hd为由电缆长度信息所得位置信息;δλ为经度误差,即位置误差分量δθx;δL为纬度误差,即位置误差分量δθy;υ(t)为量测噪声矢量,满足N(0,R)的高斯白噪声过程.整理式(10)~式(12),可得量测矩阵H(t)的表达式为
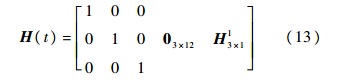
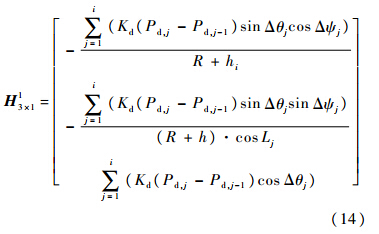
式中:H13×1的表达式为
4 半实物仿真验证为了验证本文提出的组合测量方法的有效性,搭建了实验室样机.首先模拟一般油气井的井眼轨迹,采用轨迹发生器仿真生成惯性测量数据;然后加入由实验室样机采集得到的惯性传感器噪声数据组成半实物仿真数据;最后进行纯惯性测量方法与本文提出的组合测量方法进行仿真计算与比较. 4.1 仿真轨迹设计常规油气井一般包含直井段、造斜段和稳斜段.各阶段的主要参数如表 1所示.表 1 井眼轨迹参数Table 1 Parameters of oil borehole trajectory
| 轨迹阶段 | 姿态角变化率/((°)·min-1) | 运行时间/s | 运行速度/(m·s-1) | ||
| 倾斜 | 方位 | 工具面 | |||
| 直井 | 0 | 0 | 0 | 3000 | 0.5 |
| 造斜 | 1.5 | 0 | 0 | 2400 | 0.5 |
| 稳斜1 | 0 | 1.5 | 0 | 2400 | 0.5 |
| 稳斜2 | 0 | 0 | 0 | 6600 | 0.5 |
表选项
初始参数如表 2所示.考虑到当倾斜角在0°附近时,方位角不存在,因此这里设置初始倾斜角为10°.表 2 初始参数Table 2 Initial parameters
| 参数 | 位置 | 姿态/(°) | 速度/(m·s-1) | ||||
| 经度/(°) | 纬度/(°) | 高度/m | 倾斜 | 方位 | 工具面 | ||
| 数值 | 116.0 | 35.0 | 0 | 10.0 | 180.0 | 0 | 0 |
表选项
根据表 2所示轨迹仿真条件,采用轨迹发生器产生的油气井眼轨迹如图 4所示.
 |
| 图 4 井眼轨迹三维图Fig. 4 Three-dimensional figure of oil borehole trajectory |
| 图选项 |
将实验样机放置三轴转台上,采集其静态数据14400s,去除平均值得到噪声数据,叠加到轨迹发生器生成的惯性测量数据中,加入陀螺常值漂移误差0.3(°)/h,加速度计常值漂移误差100μg,计数器刻度系数误差0.001,形成半实物仿真惯性测量数据.样机传感器指标如表 3所示.表 3 传感器参数Table 3 Sensor parameters
| 轴向 | 零偏稳定性(1σ) | |
| 光纤陀螺/((°)·h-1) | 加速度计/μg | |
| x | 0.3025 | 32.33 |
| y | 0.3006 | 75.05 |
| z | 0.2943 | 63.84 |
表选项
4.2 仿真结果分析 对半实物仿真数据分别进行纯惯性测量与本文提出的组合测量算法仿真计算,姿态误差及位置误差结果分别如图 5和图 6所示.
 |
| 图 5 姿态误差Fig. 5 Attitude error |
| 图选项 |
 |
| 图 6 位置误差Fig. 6 Position error |
| 图选项 |
从仿真计算结果可见,组合测量方法能有效抑制测量误差增长.从图 5中可见,14400s仿真计算中,纯惯导计算的倾斜角、工具面角和方位角误差最大值分别为0.08°,0.31°和-1.50°,且倾斜角误差和方位角误差随时间累积,工具面角误差周期震荡;组合测量计算的倾斜角、工具面角和方位角误差最大值分别为0.02°,0.12°和-0.98°,误差不仅没有随时间发散,而且随着时间逐渐减小.在14400s时刻的倾斜角、工具面角和方位角误差分别为0.003°,0.01°和-0.31°.图 6中位置误差对比更明显,在14400s时刻,纯惯性测量误差达到了60868m,而组合测量误差仅为47.5m.仿真结果表明姿态和位置精度均能保持在一定范围内,提高了光纤陀螺测斜仪长时间保精度测量的性能. 5 结 论1) 建立了电缆长度辅助的光纤陀螺井眼轨迹测量模型.2) 提出的方法能够有效抑制测量误差随时间的累积,提高光纤陀螺测斜仪的性能.3) 对于光纤陀螺惯性测量技术在民用领域的推广具有一定的价值.
参考文献
| [1] | Noureldin A.New measurement-while-drilling surveying technique utilizingsets of fiber optic rotation sensors[D].Calgary:University of Calgary,2002. |
| Click to display the text | |
| [2] | Torkildsen T,Edvardsen I,Fjogstad A,et al.Drilling fluid affects MWD magnetic azimuth and wellbore position[C]//Proceedings of IADC/SPE Drilling Conference.Dallas,Texas:SPE,2004:595-602. |
| Click to display the text | |
| [3] | Ledroz A G,Pecht E,Cramer D,et al.FOG-based navigation in downhole environment during horizontal drilling utilizing a complete inertial measurement unit:directional measurement-while-drilling surveying[J].IEEE Transations on Instrumentation and Measurement,2005,54(5):1997-2006. |
| Click to display the text | |
| [4] | ElGizawy M L.Continuous measurement while drilling surveying system utilizing MEMS inertial sensors[D].Calgary:University of Calgary,2009. |
| Click to display the text | |
| [5] | Noureldin A,Tabler H,Irvine-Halliday D,et al.Testing the applicability of fiber optic gyroscopes for azimuth monitoring for measurement-while-drilling processes in the oil industry[C]//Proceedings of IEEE Symposium on Position Location and Navigation.Piscataway,NJ:IEEE,2000:291-298. |
| Click to display the text | |
| [6] | 张春熹,高爽.自主式光纤陀螺油井测斜仪[J].仪表技术与传感器,2006(11):9-11. Zhang C X,Gao S.Autonomous fiber optic gyroscopes inclinometer for well logging[J].Instrument Technique and Sensor,2006(11):9-11(in Chinese). |
| Cited By in Cnki (17) | |
| [7] | 颜廷洋,张春熹,高爽,等.光纤陀螺测斜仪设计和实验[J].中国惯性技术学报,2013,21(2):179-181. Yan T Y,Zhang C X,Gao S,et al.Design and experiments of FOG inclinometer for surveying borehole[J].Journal of Chinese Inertial Technology,2013,21(2):179-181(in Chinese). |
| Cited By in Cnki | |
| [8] | Zhang Y S,Wang S W,Fang J C.Measurement while drilling instrument based on predigested inertial measurement unit[J].IEEE Transations on Instrumentation and Measurement,2012,61(12): 3295-3302. |
| Cited By in Cnki | Click to display the text | |
| [9] | 颜廷洋,张春熹,高爽,等.附加运动约束的光纤陀螺测斜仪动态测量[J].中国惯性技术学报,2012,20(6):650-653 Yan T Y,Zhang C X,Gao S,et al.Continuous measurement for fiber optic gyro inclinometer with motion constraint[J].Journal of Chinese Inertial Technology,2012,20(6):650-653(in Chinese). |
| Cited By in Cnki | |
| [10] | Shin E H.Estimation techniques for low cost inertial navigation[D].Calgary:University of Calgary,2005. |
| Click to display the text | |
| [11] | Guo J C.Development of a precise GPS/INS/on-board vehicle sensors integrated vehicular positioning system[D].Calgary:University of Calgary,2007. |
| Click to display the text | |
| [12] | Li T.Use of wheel speed sensor to enhance a reduced IMU ultra-tight GNSS receiver[D].Calgary:University of Calgary,2009. |
| Click to display the text | |
| [13] | 林铁,林恒,高爽,等.光纤陀螺测斜仪数据采集及传输单元设计与实现[J].测井技术,2009,33(4):402-405. Lin T,Lin H,Gao S,et al.Design and implementation of data acquisition and transmission for fiber optic gyroscopes inclinometer[J].Well Logging Technology,2009,33(4):402-405(in Chinese). |
| Cited By in Cnki (8) | |
| [14] | Rogers R M.Velocity error reresentations in inertial navigation system error models,AIAA-1995-3193-CP[R].Reston:AIAA,1995. |
| [15] | Rogers R M.Applied mathematics in integrated navigation systems[M].2nd ed.Reston:American Institute of Aeronautics and Astronautics,2003:77-84. |
| [16] | 张小跃,杨功流,张春熹.捷联惯导/里程计组合导航方法[J].北京航空航天大学学报,2013,39(7):292-296. Zhang X Y,Yang G L,Zhang C X.Integrated navigation method for SINS and odometer[J].Journal of Beijing University of Aeronautics and Astronautics,2013,39(7):292-296(in Chinese). |
| Cited By in Cnki (2) | |
| [17] | 秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,1998:69-76. Qin Y Y,Zhang H Y,Wang S H.Theory of Kalman filter and integrated navigation[M].Xi'an:Northwestern Polytechnical University Press,1998:69-76(in Chinese). |
