| 小型仿人足球机器人MOS-7的系统设计及局部优化 |
| 张继文, 刘莉, 陈恳 |
| 清华大学 机械工程系, 摩擦学国家重点实验室, 精密超精密制造装备及控制北京市重点实验室, 北京 100084 |
| System design and local optimization of a small humanoid soccer robot MOS-7 |
| ZHANG Jiwen, LIU Li, CHEN Ken |
| Beijing Key Laboratory of Precision/Ultra-Precision Manufacturing Equipments and Control, State Key Laboratory of Tribology, Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China |
摘要:
| |||
| 摘要小型仿人足球机器人在保持较低的构建成本条件下具有推进人工智能及机器人技术进步的潜力。该文在延续MOS系列先前设计的基础上,从结构、控制和软件方面改进并实现了新一代MOS-7小型平台。通过更改髋部关节自由度配置优化了下肢及躯干的空间布局;髋部驱动器连接方式的改进增强了机械结构的可靠性;依据任务实时性和运行快速性合理安排了决策控制系统的任务;图像采集系统实现了图像分辨率、可处理帧速率、可靠性及复杂度这4个维度的联合优化;通过引入粒子决策实现了智能算法的提升。MOS-7设计结果体现出有限资源合理配置、机电系统综合优化等小型仿人机器人设计特点。 | |||
| 关键词 :仿人机器人,视觉,决策,控制,结构优化 | |||
| Abstract:Small humanoid soccer robots can be used as inexpensive platforms to improve artificial intelligence and robotic systems. A new generation soccer robot, MOS-7, was developed with a modified structure, control system and software. The spatial arrangement of the lower limbs and trunk was optimized by changing the degree of freedom (DOF) configuration of its hip and improving the connections for the hip actuators to enhance the mechanical reliability. The decision-making and control tasks were arranged according to their real-time needs and running speed.The image capture system was optimized in 4 dimensions:resolution, accessible frame rate, reliablity and complexity. The artificial intelligence was improved by introducing novel particle decision-making abilities. The MOS-7 system is then a small humanoid platform that uses limited resources in an integrated and optimized mechanical-electronic system. | |||
| Key words:humanoid robotvisiondecision-makingcontrolstructure optimization | |||
| 收稿日期: 2015-08-26 出版日期: 2016-08-23 | |||
| |||
| 通讯作者:陈恳,教授,E-mail:kenchen@tsinghua.edu.cnE-mail: kenchen@tsinghua.edu.cn | |||
| 引用本文: |
| 张继文, 刘莉, 陈恳. 小型仿人足球机器人MOS-7的系统设计及局部优化[J]. 清华大学学报(自然科学版), 2016, 56(8): 811-817. ZHANG Jiwen, LIU Li, CHEN Ken. System design and local optimization of a small humanoid soccer robot MOS-7. Journal of Tsinghua University(Science and Technology), 2016, 56(8): 811-817. |
| 链接本文: |
| http://jst.tsinghuajournals.com/CN/10.16511/j.cnki.qhdxxb.2016.22.032或 http://jst.tsinghuajournals.com/CN/Y2016/V56/I8/811 |
图表:
 |
| 图1 MOS-7小型仿人足球机器人外形 |
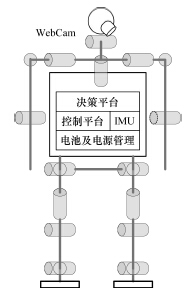 |
| 图2 MOS-7机器人机械及决策控制系统简图 |
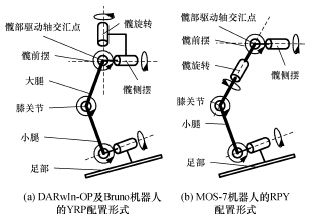 |
| 图3 DARwIn-OP[4]、Bruno[5]与MOS-7的髋部关节自由度配置对比示意图 |
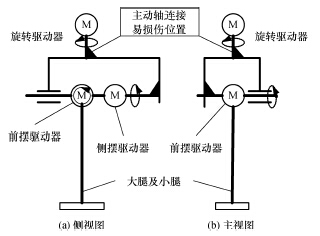 |
| 图4 髋部关节易损部位示意图 |
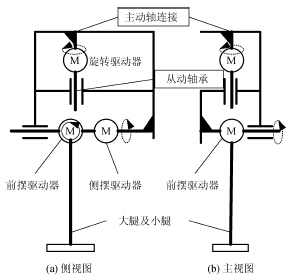 |
| 图5 通过驱动器双端连接实现的髋部关节增强结构示意图 |
 |
| 图6 MOS-7针对RoboCup/HumanoidLeague 足球赛的决策控制流程 |
 |
| 表1 决策控制关键算法性能需求列表 |
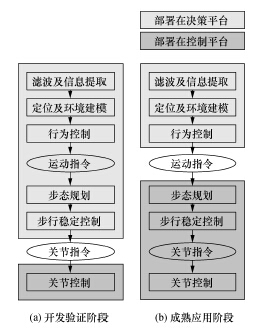 |
| 图7 MOS-7决策控制平台在开发阶段和应用阶段不同的任务分布示意图 |
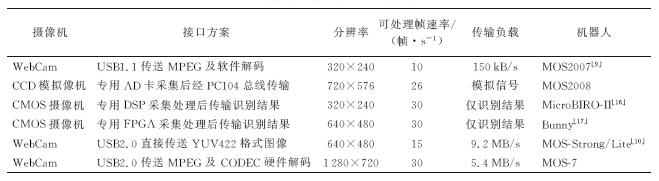 |
| 表2 现有多种图像采集方案综合性能对比 |
 |
| 图8 定位建模后集中决策与粒子决策原理对比 |
 |
| 图9 机器人调整姿态射门过程示意图 |
 |
| 图10 机器人调整对正球门问题中采用粒子决策求解的2种动作概率密度分布示意图 |
参考文献:
| [1] Asada M,Kitano H,Noda I,et al.RoboCup:Today and tomorrow-What we have learned[J].Artificial Intelligence,1999,110(2):193-214. [2] Baltes J,Sadeghnejad S,Seifert D,et al.RoboCup Humanoid League rule developments 2002-2014 and future perspectives[J].Lecture Notes in Computer Science,2014,8992:649-660. [3] Gouaillier D,Hugel V,Blazevic P,et al.Mechatronic design of NAO humanoid[C]//Proceedings of 2009 IEEE International Conference on Robotics and Automation.Piscataway,USA:IEEE,2009:769-774. [4] Inyong H,Yusuke T,Hajime A.Development of open platform humanoid robot DARwIn-OP[J].Advanced Robotics,2013,27(27):617-628. [5] Friedmann M,Kiener J,Petters S,et al.Versatile,high-quality motions and behavior control of a humanoid soccer robot[J].International Journal of Humanoid Robotics,2008,5(3):417-436. [6] Hemker T,Stelzer M,Stryk O.Efficient walking speed optimization of a humanoid robot[J].International Journal of Robotics Research,2009,28(2):303-314. [7] Acosta-Calderon C,Mohan R,Zhou C,et al.A modular architecture for humanoid soccer robots with distributed behavior control[J].International Journal of Humanoid Robotics,2008,5(3):397-416. [8] Yu D,Xiang C,Zhou C,et al.ZJUDancer Team Description Paper:Humanoid Kid-Size League of RoboCup 2014[R/OL].[2015-05-20].http://fei.edu.br/rcs/2014/Team-DescriptionPapers/Humanoid/KidSize/zjudancerTDP2014.pdf. [9] 张洪波.类人足球机器人动态步态规划方法与虚拟样机技术研究[D].北京:清华大学,2009.ZHANG Hongbo.Research on Dynamic Biped Planning for a Humanoid Soccer Robot and Virtual Prototyping Technology[D].Beijing:Tsinghua University,2009.(in Chinese) [10] 汤中华.仿人足球机器人结构设计及动态行走步态研究[D].北京:清华大学,2012.TANG Zhonghua.Mechanical Design and Research on Dynamic Walking Gait of Humanoid Soccer Robot[D].Beijing:Tsinghua University,2012.(in Chinese) [11] The Official Website of the RoboCup Humanoid League.Qualified Teams for RoboCup 2015[R/OL].[2015-05-20].https://www.robocuphumanoid.org/hl-2015/teams/. [12] Sias J,Zheng Y.How many degrees-of-freedom does a biped need?[C]//IEEE International Workshop on Intelligent Robots and Systems.Piscataway,USA:IEEE,1990:297-302. [13] Kofinas N,Orfanoudakis E,Lagoudakis M.Complete analytical forward and inverse kinematics for the NAO humanoid robot[J].Journal of Intelligent and Robotic Systems,2015,77(2):251-264. [14] Thrun S,Burgard W,Fox D.Probabilistic Robotics[M].Cambridge,MA:MIT Press,2005. [15] 张继文,刘莉,李昌硕,等.仿人机器人参数化全方位步态规划方法[J].机器人,2014,36(2):210-217.ZHANG Jiwen,LIU Li,LI Changshuo,et al.Parametric omni-directional gait planning of humanoid robots[J].Robot,2014,36(2):210-217.(in Chinese) [16] Blanes F,Muñoz P,Muñoz M,et al.Embedded distributed vision system for humanoid soccer robot[J].Journal of Physical Agents,2011,5(1):55-62. [17] Culverhouse P,Martin S,Talloneau R,et al.Vision processing on the Bunny robot humanoid robot[C]//Proceedings of the 4th Workshop on Humanoid Soccer Robots.Paris,France:IEEE,2009:60-65. |
相关文章:
|
