| 基于小偏差模型预测的车道保持辅助控制 |
| 柳长春, 都东, 潘际銮 |
| 清华大学 机械工程系, 北京 100084 |
| Predictive control for lane control systems using a small deviation model |
| LIU Changchun, DU Dong, PAN Jiluan |
| Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China |
摘要:
| |||
| 摘要车道保持辅助系统需要在保证安全性的同时适应驾驶员习惯, 避免不必要的干预。该文通过在线构建人-车系统的小偏差模型, 基于模型预测控制理论, 设计了车道保持辅助控制策略。控制器通过在线求解二次规划问题, 获得矫正转向角, 帮助驾驶员避免无意的车道偏离。根据车辆当前状态, 计算名义预测轨迹。通过将非线性人-车模型围绕名义轨迹逐次线性化, 在线获取人-车系统小偏差模型。通过对系统安全性和驾驶员适应性指标的量化设计, 得到相应的目标函数和I/O约束, 建立了滚动时域优化问题。仿真实验演示了该控制器探测车道偏离危险和转向矫正的过程。真实场景下的实车实验表明: 该系统具有避免车道偏离、适应驾驶员习惯、避免不必要干预的能力。 | |||
| 关键词 :车道保持,模型预测控制,小偏差模型,驾驶员辅助系统 | |||
| Abstract:Lane control systems automatically keep a vehicle in its lane to improve driving safety. Such systems need to adapt to the driver's characteristics and should reduce unnecessary intervention. A small deviation model of the human-vehicle system is formulated for on-line prediction of the future vehicle trajectory with an assistance control strategy based on model predictive control (MPC). A corrective steering angle is computed by solving a quadratic programming problem. The nominal trajectory is predicted using the current vehicle information. Then, a deviation model is obtained by successively linearizing the human-vehicle system around the nominal prediction trajectory. A cost function and I/O constraints are designed according to a performance index. Simulations and real world tests show that this approach is able to avoid unintended lane departures while adapting to the driver's driving patterns and avoiding unnecessary intervention. | |||
| Key words:lane keepingmodel predictive controlsmall deviation modeldriver assistance system | |||
| 收稿日期: 2014-12-09 出版日期: 2015-11-16 | |||
| |||
| 基金资助:国家留学基金委赞助项目(201206210103) | |||
| 通讯作者:都东,教授,E-mail:dudong@tsinghua.edu.cnE-mail: dudong@tsinghua.edu.cn | |||
| 作者简介: 柳长春(1988-),男(汉),河南,博士研究生。 | |||
| 引用本文: |
| 柳长春, 都东, 潘际銮. 基于小偏差模型预测的车道保持辅助控制[J]. 清华大学学报(自然科学版), 2015, 55(10): 1087-1092. LIU Changchun, DU Dong, PAN Jiluan. Predictive control for lane control systems using a small deviation model. Journal of Tsinghua University(Science and Technology), 2015, 55(10): 1087-1092. |
| 链接本文: |
| http://jst.tsinghuajournals.com/CN/10.16511/j.cnki.qhdxxb.2015.22.011或 http://jst.tsinghuajournals.com/CN/Y2015/V55/I10/1087 |
图表:
 |
| 图1 系统模型示意图 |
 |
| 表1 控制器参数 |
 |
| 图2 注意力分散的驾驶员接近弯道仿真结果 |
 |
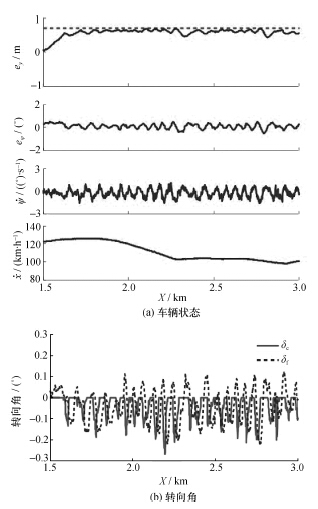
| 图3 注意力分散的驾驶员通过弯道的测试结果 |
 |
| 图4 驾驶员无意识偏离直线车道的测试结果 |
参考文献:
| [1] Mellinghoff U, Breitling T, Schöneburg R, et al. The Mercedes-Benz experimental safety vehicle [C]// International Technique Conference on Enhanced Safety Vehicles. Stuttgart, Germany, 2009: 1-11. [2] Jansson J, Gustafsson F. A framework and automotive application of collision avoidance decision making [J]. Automatica, 2008, 44(9): 2347-2351. [3] Liu J, Su Y, Ko M, et al. Development of a vision-based driver assistance system with lane departure warning and forward collision warning functions [C]// IEEE Digital Image Computing: Techniques and Applications. Canberra, Australia, 2008: 480-485. [4] Vasudevan R, Shi V, Gao Y, et al. Safe semi-autonomous control with enhanced driver modeling [C]// American Control Conference. Montréal, Canada, 2012: 2896-2903. [5] Mammar S, Glaser S, Netto M. Time to line crossing for lane departure avoidance: A theoretical study and an experimental setting [J]. IEEE Transactions on Intelligent Transportation Systems, 2006, 7(2): 226-241. [6] Falcone P, Tseng H E, Borrelli F, et al. MPC-based yaw and lateral stabilisation via active front steering and braking [J]. Vehicle System Dynamics, 2008, 46(S1): 611-628. [7] Falcone P, Borrelli F, Asgari J, et al. Predictive active steering control for autonomous vehicles [J]. IEEE Transactions on Control Systems Technology, 2007, 15(3): 566-580. [8] Li S, Li K, Rajamani R, et al. Model predictive multi- objective vehicular adaptive cruise control [J]. IEEE Transactions on Control Systems Technology, 2011, 19(3): 556-566. [9] Gray A, Ali M, Gao Y, et al. A unified approach to threat assessment and control for automotive active safety [J]. IEEE Transactions on Intelligent Transportation Systems, 2013, 14(3): 1490-1499. [10] Gray A, Ali M, Gao Y, et al. Integrated threat assessment and control design for roadway departure avoidance [C]// Intelligent Transportation Systems (ITSC). Anchorage, AK, USA, 2012: 1714-1719. [11] Liu C, Andrew G, Lee C, et al. Nonlinear stochastic predictive control with unscented transformation for semi-autonomous vehicles [C]// American Control Conference (ACC). Portland, OR, USA, 2014: 5574-5579. [12] Liu C, Zheng J, Pan J. Robust semi-autonomous vehicle control for roadway departure and obstacle avoidance [C]// IEEE 12th International Conference on Systems, Automation and Control. Gwangju, Korea, 2013: 1024-1028. [13] Anderson S J, Peters S C, Pilutti T E, et al. An optimal-control-based framework for trajectory planning, threat assessment, and semi-autonomous control of passenger vehicles in hazard avoidance scenarios [J]. International Journal of Vehicle Autonomous Systems, 2010, 8(2): 190-216. [14] Gray A, Gao Y, Hedrick J K, et al. Robust predictive control for semi-autonomous vehicles with an uncertain driver model [C]// Intelligent Vehicles Symposium (IV). Gold Coast City, Australia, 2013: 208-213. [15] Gray A, Gao Y, Hedrick J K, et al. Stochastic predictive control for semi-autonomous vehicles with an uncertain driver model [C]// Intelligent Transportation Systems Conference. Hague, Netherlands, 2013: 2329-2334. [16] Pacejka H. Tyre and Vehicle Dynamics [M]. Amsterdam, Netherlands: Elsevier, 2005. |
相关文章:
|
