| 基于干扰观测器的磁悬浮系统精确反馈线性化 |
| 姜文雪, 周凯 |
| 清华大学 机械工程系, 北京 100084 |
| Precise feedback linearization in EMS systems based on a disturbance observer |
| JIANG Wenxue, ZHOU Kai |
| Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China |
摘要:
| |||
| 摘要磁悬浮系统是开环不稳定的强非线性系统。 为了提高机床磁悬浮系统的悬浮精度, 该文结合反馈线性化方法和干扰观测器补偿对磁悬浮系统进行精确线性化。对磁悬浮系统反馈线性化误差进行了分析, 建立了磁悬浮系统反馈线性化误差模型。设计了干扰观测器, 并分析了干扰观测器对反馈线性化误差的补偿作用, 最后进行了实验研究。研究表明: 干扰观测器能够有效补偿反馈线性化误差, 获得精确线性化模型。实验结果表明:磁悬浮进给系统的磁悬浮工作台实现了精确线性化, 工作台悬浮精度大幅度提高, 达到μm级精度。 | |||
| 关键词 :机床,磁悬浮,反馈线性化,干扰观测器 | |||
| Abstract:Electromagnetic suspension (EMS) systems are unstable open-loop, strongly nonlinear systems. The suspension accuracy of EMS systems for machine tools is improved by integrating the feedback linearization method with a disturbance observer (DOB) to precisely linearize the EMS system. The feedback linearization error is analyzed and modeled in this paper. The DOB is then designed to compensate for the feedback linearization error. This study indicates that the DOB effectively compensates for the feedback linearization error to give precise linearization of EMS systems. Tests illustrate that the EMS feed system gives precise linearization and the platform suspension accuracy is greatly improved to micron scale accuracy. | |||
| Key words:machine toolelectromagnetic suspensionfeedback linearizationdisturbance observer | |||
| 收稿日期: 2013-12-04 出版日期: 2015-11-16 | |||
| |||
| 基金资助:国家自然科学基金项目(51275257) | |||
| 通讯作者:周凯,教授,E-mail:zhoukai@mail.tsinghua.edu.cnE-mail: zhoukai@mail.tsinghua.edu.cn | |||
| 作者简介: 姜文雪(1985-),女(汉),山东,博士研究生。 | |||
| 引用本文: |
| 姜文雪, 周凯. 基于干扰观测器的磁悬浮系统精确反馈线性化[J]. 清华大学学报(自然科学版), 2015, 55(10): 1067-1071. JIANG Wenxue, ZHOU Kai. Precise feedback linearization in EMS systems based on a disturbance observer. Journal of Tsinghua University(Science and Technology), 2015, 55(10): 1067-1071. |
| 链接本文: |
| http://jst.tsinghuajournals.com/CN/10.16511/j.cnki.qhdxxb.2015.22.016或 http://jst.tsinghuajournals.com/CN/Y2015/V55/I10/1067 |
图表:
 |
| 图1 磁悬浮进给系统 |
 |
| 图2 磁悬浮系统反馈线性化 |
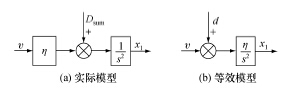 |
| 图3 反馈线性化误差模型 |
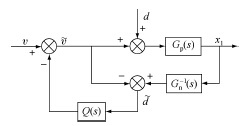 |
| 图4 干扰观测器补偿 |
 |
| 图5 磁悬浮系统精确线性化控制框图 |
 |
| 表1 磁悬浮工作台悬浮精度 |
 |
| 图6 无DOB补偿、采用参数1和参数2时的工作台悬浮高度 |
 |
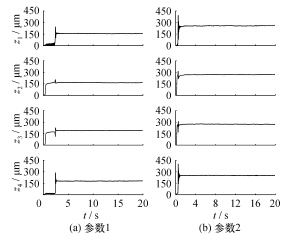
| 图7 有DOB补偿、采用参数1和参数2时的工作台悬浮高度 |
参考文献:
| [1] 郭庆鼎, 赵希梅, 孙宜标, 等. 磁悬浮横梁零相位直线驱动龙门移动镗铣床及控制方法[P]. 中国: CN200610047574.X. 2007-02-21.GUO Qingding, ZHAO Ximei, SUN Yibiao, et al. EMS Cross Rail Zero-Phase Linear Drive Gantry Machine and Control Method [P]. China: CN200610047574.X. 2007-02-21. (in Chinese) [2] 王丽梅, 石佳. 基于反馈线性化的龙门数控机床磁悬浮系统滑模鲁棒控制[J]. 机床与液压, 2008, 36(5): 254-256.WANG Limei, SHI Jia. Sliding mode control of magnetic levitation system used in gantry NC machine tool based on feedback linearization [J]. Machine Tool & Hydraulics, 2008, 36(5): 254-256. (in Chinese) [3] 安明伟. 机床用磁悬浮系统悬浮高度的鲁棒控制研究[D]. 沈阳: 沈阳工业大学, 2010.AN Mingwei. Robust Control of Levitation Height in Electromagnetic Levitation System Used in Machine Tool [D]. Shenyang: Shenyang University of Technology, 2010. (in Chinese) [4] 王军闯. NC机床磁悬浮进给机构研究[D]. 大连: 大连交通大学, 2006.WANG Junchuang. Study on Magnetic Suspension Feed Mechanism for NC Machine Tools [D]. Dalian: Dalian Jiaotong University, 2006. (in Chinese) [5] 葛研军, 张文跃, 蒋成勇, 等. 数控机床磁浮直线进给系统[P]. 中国: CN200610161995.5. 2007-08-29.GE Yanjun, ZHANG Wenyue, JIANG Chengyong, et al. EMS Linear Feed Drive System of NC Machine Tool [P]. China: CN200610161995.5. 2007-08-29. (in Chinese) [6] 张钢, 汪希平, 朱礼进, 等. 工业应用型主动磁悬浮机床导轨直线电机进给平台[P].中国: CN200310107944.0. 2004-09-15.ZHANG Gang, WANG Xiping, ZHU Lijin, et al. Industrial EMS Linear Motor Feed Drive Platform of Machine Tool [P]. China: CN200310107944.0. 2004-09-15. (in Chinese) [7] 吴国庆. 用于数控机床的磁悬浮支承系统及其控制技术[D]. 上海: 上海大学, 2006.WU Guoqing. Magnetic Suspension Supporting System and Its Control Technology Used for Numerical Control Machine [D]. Shanghai: Shanghai University, 2006. (in Chinese) [8] JIANG Wenxue, ZHOU Kai, LV Jiangwei, et al. Superconducting EMS feed drive system of NC machine tool [J]. International Journal of Advanced Manufacturing Technology, 2014, 74(5-8): 1053-1060. [9] Trumper D L, Olson S M, Subrahmanyan P K. Linearizing control of magnetic suspension systems [J]. IEEE Transactions on Control Systems Technology, 1997, 5(4): 427-438. [10] Da Rocha P H, Ferreira H C, Porsch M C, et al. Fixed-point DSP implementation of nonlinear controller for large gap electromagnetic suspension system [J]. Control Engineering Practice, 2009, 17(10): 1148-1156. [11] Sungjun J, Seo J H. Design and analysis of the nonlinear feedback linearizing control for an electromagnetic suspension system [J]. IEEE Transactions on Control Systems Technology, 1997, 5(1): 135-144. [12] 刘德君, 郭庆鼎, 翁秀华. 直线电动机驱动3-DOF磁浮平台推力解耦控制[J]. 机械工程学报, 2005, 41(1): 234-238.LIU Dejun, GUO Qingding, WENG Xiuhua. Thrust decoupling control of linear motor driver 3-DOF planar magnetic suspension stage [J]. Chinese Journal of Mechanical Engineering, 2005, 41(1): 234-238. (in Chinese) |
相关文章:
|
