 ), 马国杰
), 马国杰 陕西省行为与认知心理学重点实验室暨陕西师范大学心理学院, 西安 710062
收稿日期:2020-12-04出版日期:2021-11-15发布日期:2021-09-23通讯作者:庄想灵E-mail:zhuangxl@snnu.edu.cn基金资助:国家自然科学基金项目(31970998)Evaluation of external HMI in autonomous vehicles based on pedestrian road crossing decision-making model
JIANG Qianni, ZHUANG Xiangling(), MA Guojie Shaanxi Key Laboratory of Behavior and Cognitive Neuroscience, School of Psychology, Shaanxi Normal University, Xi’an 710062, China
Received:2020-12-04Online:2021-11-15Published:2021-09-23Contact:ZHUANG Xiangling E-mail:zhuangxl@snnu.edu.cn摘要/Abstract
摘要: 自动驾驶汽车要进入人车混行的普通道路, 需确保与过街行人之间的交互安全和效率。为解决这一问题, 高等级自动驾驶汽车往往在车辆外部装置显示设备, 即外部人机界面(eHMIs)以和行人沟通信息。在具体设计上, 已有研究主要采用文字、图形、投影等视觉沟通形式, 传达车辆状态(是否在自动驾驶模式)、意图和对行人的过街建议等沟通信息, 并在真实路段实验、虚拟场景及实验室实验等情境中评估了界面的使用对行人过街意向、速度和准确性等指标的影响。然而, 以行人为中心的外部界面设计需系统地支持行人过街决策前各阶段的信息加工需求。因此, 我们结合行人过街决策过程和情境意识理论, 提出行人与自动驾驶汽车交互中的动态过街决策模型, 从行人认知加工视角评估各种界面的沟通效果。评估的结果启示, eHMIs应促进行人对车辆信息的感知、理解和预测。在感知阶段, 应采用多种类型界面、多呈现载体相结合, 增强信息的可识别性。在理解阶段, 需结合文字说明、合理选择沟通视角、信号标准化和培训提高可理解性。在预测阶段, 应结合车辆内隐运动信息, 帮助行人快速准确获取车辆未来行动意图。更重要的是, 未来研究应关注在多行人、多车辆混行情境下的信息沟通设计及其对行人的影响。理论方面, 未来研究也需要关注外部界面如何通过自下而上的通路影响情境意识和心智模型的形成。
图/表 2
表1当前研究者设计的eHMIs(外部人机交互界面)总结
 |
表1当前研究者设计的eHMIs(外部人机交互界面)总结
| |
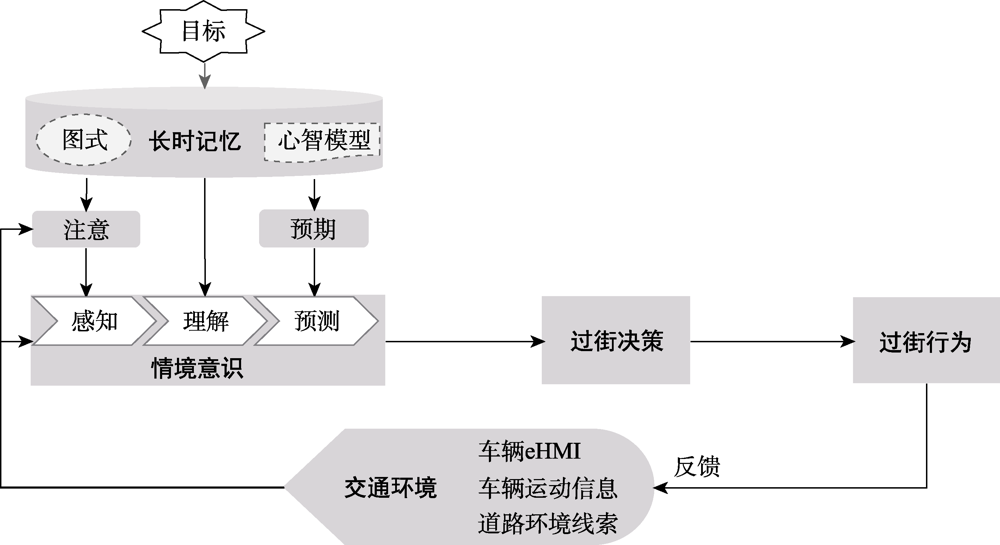
图1行人与自动驾驶汽车交互中的动态过街决策模型, 基于情境意识模型(Endsley, 1995)和动态过街决策模型(Rodríguez Palmeiro et al., 2018)。为突显自上而下与自下而上两条加工路径如何影响情境意识, 模型仅呈现情境意识形成过程中的认知加工通路。
图1行人与自动驾驶汽车交互中的动态过街决策模型, 基于情境意识模型(Endsley, 1995)和动态过街决策模型(Rodríguez Palmeiro et al., 2018)。为突显自上而下与自下而上两条加工路径如何影响情境意识, 模型仅呈现情境意识形成过程中的认知加工通路。参考文献 55
| [1] | Ackermann, C., Beggiato, M., Bluhm, L.-F., Löw, A., & Krems, J. F. (2019). Deceleration parameters and their applicability as informal communication signal between pedestrians and automated vehicles. Transportation Research Part F: Traffic Psychology and Behaviour, 62, 757-768. doi: 10.1016/j.trf.2019.03.006URL |
| [2] | Ackermann, C., Beggiato, M., Schubert, S., & Krems, J. F. (2019). An experimental study to investigate design and assessment criteria: What is important for communication between pedestrians and automated vehicles? Applied Ergonomics, 75, 272-282. doi: S0003-6870(18)30612-4pmid: 30509537 |
| [3] | Badue, C., Guidolini, R., Carneiro, R. V., Azevedo, P., Cardoso, V. B., Forechi, A., ... de Souza, A. F. (2019). Self-driving cars: A survey. Expert Systems with Applications, 165(3). |
| [4] | Bazilinskyy, P., Dodou, D., & de Winter, J. (2019). Survey on eHMI concepts: The effect of text, color, and perspective. Transportation Research Part F: Traffic Psychology and Behaviour, 67, 175-194. doi: 10.1016/j.trf.2019.10.013URL |
| [5] | Björklund, G. M., & Åberg, L. (2005). Driver behaviour in intersections: Formal and informal traffic rules. Transportation Research Part F: Traffic Psychology and Behaviour, 8(3), 239-253. doi: 10.1016/j.trf.2005.04.006URL |
| [6] | Burns, C. G., Oliveira, L., Thomas, P., Iyer, S., & Birrell, S. (2019, June). Pedestrian decision-making responses to external human-machine interface designs for autonomous vehicles. Paper presented at the meeting of 2019 IEEE Intelligent Vehicles Symposium, Paris, France. |
| [7] | Chang, C.-M., Toda, K., Sakamoto, D., & Igarashi, T. (2017). Eyes on a car:An interface design for communication between an autonomous car and a pedestrian. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 65-73). New York, NY, United States: Association for Computing Machinery. |
| [8] | Chen, W., Jiang, Q., Zhuang, X., & Ma, G. (2020). Comparison of pedestrians' gap acceptance behavior towards automated and human-driven vehicles. In D. Harris, W.-C. Li (Eds), Engineering Psychology and Cognitive Ergonomics. Cognition and Design (pp.253-261). Cham, Switzerland: Springer. |
| [9] | Clamann, M., Aubert, M., & Cummings, M. L. (2017, January). Evaluation of vehicle-to-pedestrian communication displays for autonomous vehicles. Paper presented at the Transportation Research Board 96th Annual Meeting, Washington DC, United States. |
| [10] | Cœugnet, S., Cahour, B., & Kraiem, S. (2019). Risk-taking, emotions and socio-cognitive dynamics of pedestrian street-crossing decision-making in the city. Transportation Research Part F: Traffic Psychology and Behaviour, 65, 141-157. doi: 10.1016/j.trf.2019.07.011URL |
| [11] | de Clercq, K., Dietrich, A., Velasco, J. P. N., de Winter, J., & Happee, R., (2019). External human-machine interfaces on automated vehicles: Effects on pedestrian crossing decisions. Human Factors, 61(8), 1353-1370. doi: 10.1177/0018720819836343pmid: 30912985 |
| [12] | Deb, S., Strawderman, L., Carruth, D. W., DuBien, J., Smith, B., & Garrison, T. M. (2017). Development and validation of a questionnaire to assess pedestrian receptivity toward fully autonomous vehicles. Transportation Research Part C: Emerging Technologies, 84, 178-195. doi: 10.1016/j.trc.2017.08.029URL |
| [13] | Deb, S., Strawderman, L. J., & Carruth, D. W. (2018). Investigating pedestrian suggestions for external features on fully autonomous vehicles: A virtual reality experiment. Transportation Research Part F: Traffic Psychology and Behaviour, 59, 135-149. doi: 10.1016/j.trf.2018.08.016URL |
| [14] | Dey, D., Habibovic, A., Locken, A., Wintersberger, P., Pfleging, B., Riener, A., ... Terken, J. (2020). Taming the eHMI jungle: A classification taxonomy to guide, compare, and assess the design principles of automated vehicles’ external human-machine interfaces. Transportation Research Interdisciplinary Perspectives, 7. |
| [15] | Dey, D., Martens, M., Eggen, B., & Terken, J. (2017). The impact of vehicle appearance and vehicle behavior on pedestrian interaction with autonomous vehicles. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications Adjunct (pp.158-162). New York, NY, United States: Association for Computing Machinery. |
| [16] | Dey, D., & Terken, J. (2017). Pedestrian interaction with vehicles:Roles of explicit and implicit communication. In Proceedings of the 9th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 109-113). New York, NY, United States: Association for Computing Machinery. |
| [17] | Eisma, Y. B., van Bergen, S., ter Brake, S. M., Hensen, M. T. T., Tempelaar, W. J., & de Winter, J. C. F. (2019). External human-machine interfaces: The effect of display location on crossing intentions and eye movements. Information, 11(1), 13. doi: 10.3390/info11010013URL |
| [18] | Endsley, M. R. (1990). Situation awareness in dynamic human decision making: Theory and measurement (Unpublished doctoral dissertation). University of Southern California, Los Angeles, CA. |
| [19] | Endsley, M. R. (1995). Toward a Theory of Situation Awareness in Dynamic Systems. Human Factors, 37(1), 32-64. doi: 10.1518/001872095779049543URL |
| [20] | Endsley, M. R. (2000). Theoretical underpinnings of situation awareness:A critical review. In M. R. Endsley, & D. J. Garland (Eds.), Situation awareness analysis and measurement (pp.3-6). Mahwah, NJ, USA: Lawrence Erlbaum Associates. |
| [21] | Faas, S. M., & Baumann, M. (2019). Light-based external human machine interface:Color evaluation for self-driving vehicle and pedestrian interaction. Proceedings of the Human Factors and Ergonomics Society Annual Meeting, 63(1), 1232-1236. |
| [22] | Faas, S. M., Mathis, L.-A., & Baumann, M. (2020). External HMI for self-driving vehicles: Which information shall be displayed? Transportation Research Part F: Traffic Psychology and Behaviour, 68, 171-186. doi: 10.1016/j.trf.2019.12.009URL |
| [23] | Fridman, L., Mehler, B., Xia, L., Yang, Y., Facusse, L. Y., & Reimer, B. (2017, January). To walk or not to walk: Crowdsourced assessment of external vehicle-to-pedestrian displays. Paper presented at the meeting of Transportation Research Board Annual Meeting, Washington, DC. |
| [24] | Fuest, T., Sorokin, L., Bellem, H., & Bengler, K. (2018). Taxonomy of traffic situations for the interaction between automated vehicles and human road users. In Advances in Intelligent Systems and Computing:Vol. 597. Advances in Human Aspects of Transportation (pp.708-719). Cham, Switzerland: Springer. |
| [25] | Grahn, H., Kujala, T., Silvennoinen, J., Leppanen, A., & Saariluoma, P. (2020). Expert drivers' prospective thinking-aloud to enhance automated driving technologies - Investigating uncertainty and anticipation in traffic. Accident Analysis & Prevention, 146, 105717. doi: 10.1016/j.aap.2020.105717URL |
| [26] | Habibovic, A., Lundgren, V. M., Andersson, J., Klingegard, M., Lagstrom, T., Sirkka, A., ... Larsson, P. (2018). Communicating intent of automated vehicles to pedestrians. Frontiers in Psychology, 9, 1336. doi: 10.3389/fpsyg.2018.01336pmid: 30131737 |
| [27] | Hagenzieker, M. P., van der Kint, S., Vissers, L., van Schagen, I. N. L. G., de Bruin, J., van Gent, P., & Commandeur, J. J. F. (2019). Interactions between cyclists and automated vehicles: Results of a photo experiment. Journal of Transportation Safety & Security, 12(1), 94-115. |
| [28] | Houtenbos, M., Hagenzieker, M., Wieringa, P., & Hale, A. (2005). The role of expectations in interaction behaviour between car drivers. In G. Underwood (Ed.), Traffic and Transport Psychology: Theory and Application (pp.303-314). Kidlington, Oxford: Elsevier. |
| [29] | Hudson, C. R., Deb, S., Carruth, D. W., McGinley, J., & Frey, D. (2018). Pedestrian perception of autonomous vehicles with external interacting features. In Advances in intelligent systems and computing:Vol. 781. Advances in human factors and systems interaction (pp.33-39). Cham, Switzerland: Springer. |
| [30] | Jones, D. G., & Endsley, M. R. (1996). Sources of situation awareness errors in aviation. Aviation Space and Environmental Medicine, 67(6), 507-512. pmid: 8827130 |
| [31] | Kooijman, L., Happee, R., & de Winter, J. C. F. (2019). How do eHMIs affect pedestrians’ crossing behavior? A study using a head-mounted display combined with a motion suit. Information (Switzerland), 10(12), 386. |
| [32] | Lagstrom, T., & Lundgren, V. (2015). AVIP-Autonomous vehicles’ interactions with pedestrians. An investigation of pedestrian-driver communication and development of a vehicle external interface. (Unpublished doctoral dissertation). Chalmers University Technology, Sweden. |
| [33] | Lee, Y. M., Madigan, R., Garcia, J., Tomlinson, A., Solernou, A., Romano, R., ... Uttley, J. (2019). Understanding the messages conveyed by automated vehicles. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp.134-143). New York, NY, United States: Association for Computing Machinery. |
| [34] | Li, Y., Dikmen, M., Hussein, T. G., Wang, Y., & Burns, C. (2018). To cross or not to cross:Urgency-based external warning displays on autonomous vehicles to improve pedestrian crossing safety. In Proceedings of the 10th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp. 188-197). New York, NY, United States: Association for Computing Machinery. |
| [35] | Löcken, A., Golling, C., & Riener, A. (2019). How should automated vehicles interact with pedestrians? A comparative analysis of interaction concepts in virtual reality. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp.262-274). New York, NY, United States: Association for Computing Machinery. |
| [36] | Lundgren, V. M., Habibovic, A., Andersson, J., Lagström, T., Nilsson, M., Sirkka, A., ... Saluäär, D. (2017). Will there be new communication needs when introducing automated vehicles to the urban context? In Advances in Intelligent Systems and Computing:Vol. 484. Advances in Human Aspects of Transportation (pp.485-497). Cham, Switzerland: Springer. |
| [37] | Madigan, R., Nordhoff, S., Fox, C., Ezzati Amini, R., Louw, T., Wilbrink, M., ... Merat, N. (2019). Understanding interactions between automated road transport systems and other road users: A video analysis. Transportation Research Part F: Traffic Psychology and Behaviour, 66, 196-213. doi: 10.1016/j.trf.2019.09.006URL |
| [38] | Mahadevan, K., Somanath, S., & Sharlin, E. (2018). Communicating awareness and intent in autonomous vehicle-pedestrian interaction. In Proceedings of the 2018 CHI Conference on Human Factors in Computing Systems (pp.1-12). New York, NY, United States: Association for Computing Machinery. |
| [39] | Matthews, M., Chowdhary, G. V., & Kieson, E. (2017). Intent communication between autonomous vehicles and pedestrians. ArXiv Preprint: 1708.07123. |
| [40] | Moore, D., Currano, R., Strack, G. E., & Sirkin, D. (2019). The case for implicit external human-machine interfaces for autonomous vehicles. In Proceedings of the 11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications (pp.295-307). New York, NY, United States: Association for Computing Machinery. |
| [41] | Othersen, I., Conti-Kufner, A. S., Dietrich, A., Maruhn, P., & Bengler, K. (2018). Designing for automated vehicle and pedestrian communication:Perspectives on eHMIs from older and younger persons. In D. de Waard, K. Brookhuis, D. Coelho, S. Fairclough, D. Manzey, A. Naumann, L.... R.Wiczorek (Eds.), Proceedings of the Human Factors and Ergonomics Society Europe Chapter 2018 Annual Conference (pp.135-148). HFES. |
| [42] | Rodríguez Palmeiro, A., van der Kint, S., Vissers, L., Farah, H., de Winter, J. C. F., & Hagenzieker, M. (2018). Interaction between pedestrians and automated vehicles: A Wizard of Oz experiment. Transportation Research Part F: Traffic Psychology and Behaviour, 58, 1005-1020. doi: 10.1016/j.trf.2018.07.020URL |
| [43] | Rothenbücher, D., Li, J., Sirkin, D., Mok, B., & Ju, W. (2016, November). Ghost driver: A field study investigating the interaction between pedestrians and driverless vehicles. In 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (pp. 795-802). IEEE. |
| [44] | Rouchitsas, A., & Alm, H. (2019). External human-machine interfaces for autonomous vehicle-to-pedestrian communication: A review of empirical work. Frontiers in Psychology, 10, 2757. doi: 10.3389/fpsyg.2019.02757URL |
| [45] | SAE International.(2016). Surface vehicle recommended practice J3016-taxonomy and definitions for terms related to driving automation systems for on-road motor vehicles. SAE International. |
| [46] | Schieben, A., Wilbrink, M., Kettwich, C., Madigan, R., Louw, T., & Merat, N. (2018). Designing the interaction of automated vehicles with other traffic participants: Design considerations based on human needs and expectations. Cognition, Technology & Work, 21(1), 69-85. |
| [47] | Schneemann, F., & Gohl, I. (2016). Analyzing driver- pedestrian interaction at crosswalks: A contribution to autonomous driving in urban environments. In 2016 IEEE Intelligent Vehicles Symposium (IV) (pp. 38-43). IEEE. |
| [48] | Song, Y. E., Lehsing, C., Fuest, T., & Bengler, K. (2018). External HMIs and their effect on the interaction between pedestrians and automated vehicles. In Advances in Intelligent Systems and Computing:Vol. 722. Intelligent Human Systems Integration (pp.13-18). Cham, Switzerland: Springer. |
| [49] | Sucha, M., Dostal, D., & Risser, R. (2017). Pedestrian-driver communication and decision strategies at marked crossings. Accident Analysis and Prevention, 102, 41-50. doi: 10.1016/j.aap.2017.02.018URL |
| [50] | Theeuwes, J. (2010). Top-down and bottom-up control of visual selection: Reply to commentaries. Acta Psychologica, 135(2), 133-139. doi: 10.1016/j.actpsy.2010.07.006URL |
| [51] | Treue, S. (2003). Visual attention: The where, what, how and why of saliency. Current Opinion in Neurobiology, 13(4), 428-432. doi: 10.1016/S0959-4388(03)00105-3URL |
| [52] | Velasco, J. P. N., Farah, H., van Arem, B., & Hagenzieker, M. P. (2019). Studying pedestrians’ crossing behavior when interacting with automated vehicles using virtual reality. Transportation Research Part F: Traffic Psychology and Behaviour, 66, 1-14. doi: 10.1016/j.trf.2019.08.015URL |
| [53] | Vissers, L., van der Kint, S., van Schagen, I., & Hagenzieker, M. (2016). Safe interaction between cyclists, pedestrians and automated vehicles. What do we know and what do we need to know? In SWOV Institute for Road Safety Research. |
| [54] | Woodman, R., Lu, K., Higgins, M. D., Brewerton, S., Jennings, P. A., & Birrell, S. (2019). Gap acceptance study of pedestrians crossing between platooning autonomous vehicles in a virtual environment. Transportation Research Part F: Traffic Psychology and Behaviour, 67, 1-14. doi: 10.1016/j.trf.2019.09.017URL |
| [55] | Zhang, J., Vinkhuyzen, E., & Cefkin, M. (2017). Evaluation of an autonomous vehicle external communication system concept:A survey study. In Advances in Intelligent Systems and Computing:Vol. 597. Advances in Human Aspects of Transportation (pp.650-661). Cham, Switzerland: Springer. |
相关文章 15
| [1] | 张振, 李海文, 熊建萍, 赵辉, 刘瑞雪, 齐春辉. 公平规范执行中内群体偏爱的心理发展机制[J]. 心理科学进展, 2021, 29(12): 2091-2104. |
| [2] | 张靓婷, 王斌, 付景涛. 组织社会化视角下员工组织公民行为动态变化趋势及其形成机制[J]. 心理科学进展, 2021, 29(12): 2105-2118. |
| [3] | 胡家镜, 张梦, 马秀丽, 刘燕. 亲顾客偏离行为的顾客响应:基于道德情绪的理论模型[J]. 心理科学进展, 2021, 29(12): 2119-2130. |
| [4] | 高在峰, 李文敏, 梁佳文, 潘晗希, 许为, 沈模卫. 自动驾驶车中的人机信任[J]. 心理科学进展, 2021, 29(12): 2172-2183. |
| [5] | 匡子翌, 张洋, 王福兴, 杨晓梦, 胡祥恩. 教师的存在能否促进视频学习?[J]. 心理科学进展, 2021, 29(12): 2184-2194. |
| [6] | 孙海龙, 安薪如, 熊冠星. 多时点结果跨期选择的决策效应及其心理机制[J]. 心理科学进展, 2021, 29(12): 2224-2235. |
| [7] | 曲佳晨, 贡喆. 信任水平存在性别差异吗?[J]. 心理科学进展, 2021, 29(12): 2236-2245. |
| [8] | 黄梓航, 王俊秀, 苏展, 敬一鸣, 蔡华俭. 中国社会转型过程中的心理变化:社会学视角的研究及其对心理学家的启示[J]. 心理科学进展, 2021, 29(12): 2246-2259. |
| [9] | 刘德鹏, 高翔宇. 组织(不)公正对组织报复行为的影响及其机制[J]. 心理科学进展, 2021, 29(12): 2260-2271. |
| [10] | 温芳芳, 柯文琳, 佐斌, 戴月娥, 聂思源, 姚奕, 韩施. 内隐关系评估程序(IRAP):测量原理及应用[J]. 心理科学进展, 2021, 29(11): 1936-1947. |
| [11] | 马双, 凌小蝶, 李纯青. 共享经济背景下顾客公民行为和不当行为:基于社会困境理论的视角[J]. 心理科学进展, 2021, 29(11): 1920-1935. |
| [12] | 袁晓劲, 刘昌. 道德直觉合乎道义却不客观[J]. 心理科学进展, 2021, 29(11): 2083-2090. |
| [13] | 葛耀君, 李海. 从个体到集体:心理学视角下的集体记忆[J]. 心理科学进展, 2021, 29(11): 2073-2082. |
| [14] | 熊冠星, 叶金明, 孙海龙. 概率估计的趋势效应及其对决策的影响机制——基于心理动量的视角[J]. 心理科学进展, 2021, 29(11): 2062-2072. |
| [15] | 陈斯允, 卫海英, 熊继伟, 冉雅璇. 大道至“简”:极简主义消费内涵解构与理论阐释[J]. 心理科学进展, 2021, 29(11): 2043-2061. |
PDF全文下载地址:
http://journal.psych.ac.cn/xlkxjz/CN/article/downloadArticleFile.do?attachType=PDF&id=5618
