
全文HTML
--> --> -->探测模块是硅像素探测器的基本单元, 其性能的测试研究在探测器研制过程中非常关键. 本文介绍探测模块性能研究测试系统, 在此系统上, 对探测模块芯片的噪声水平进行测试研究; 同时, 为了实现探测器模型不同模块间的事例对齐, 研究并实现了带触发(trigger)标记的数据连续读出的方法; 通过对探测模块的放射源测试, 研究了探测模块的响应性能以及粒子击中位置重建算法. 该研究为后续进一步测试探测模块以及探测器模型的性能奠定了基础.
 图 1 实验室测试系统装置示意图
图 1 实验室测试系统装置示意图Figure1. Schematic of the experimental setup in the laboratory.
五层探测模块平行放置, 其间距设置值是影响探测模块空间分辨率测量精度的一个重要参量. 随着探测模块间距的增大, 当带电粒子穿过探测模块时, 受多次库仑散射的影响, 径迹偏转程度(L)增大, L计算公式为
2
2.1.探测模块
探测模块的设计在满足核心功能的基础上, 还满足低物质的量和高强度的要求, 从而减少多次库仑散射, 提高测量精度. 探测模块的结构如图2所示, 10片减薄至50 μm的MIMOSA28芯片紧密排布在kapton柔性电缆上, 柔性电缆和芯片之间通过打线(wire bonding)实现电气连接. 碳纤维复合板位于探测模块的最底层, 为探测模块提供稳定的机械支撑. MIMOSA28芯片、柔性电缆和碳纤维复合板之间通过丙烯酸酯胶粘接成一个整体. 图 2 探测模块结构
图 2 探测模块结构Figure2. Structure of the detector module.
MIMOSA28芯片是由法国IPHC研究所设计的基于标准0.35 μm CMOS工艺的芯片. 该芯片在高阻衬底上生长外延层作为灵敏层, 外延层厚度为15 μm, 电阻率为400 Ω·cm. 芯片尺寸为20.22 mm × 22.71 mm, 像素阵列为928(行) × 960(列), 像素尺寸为20.7 μm. 芯片的每个像素包括一个放大器和一个相关双采样电路(correlated double sampling, CDS)[18], 并且在每一列底部还配有一个甄别器, 用于将模拟信号转化为数字信号(0或1, 即像素是否被击中着火). 芯片采用逐行扫描的读出方式, 按帧格式输出数据. 为了保证数据的连续输出, 该芯片引入了独特的内存管理机制, 采用两个存储模块用来交替存储和输出数据, 每帧读出时间为185.6 μs[15].
2
2.2.读出电子学系统和数据获取系统
读出电子学系统由数字读出板、读出控制板、START信号扇出板、Trigger信号扇出板以及时钟扇出板等部分组成, 如图1所示. 探测模块通过Samtec高速电缆与数字读出板连接. 数字读出板以Xinlinx公司的XC7K325T-2FFG676型现场可编程逻辑门阵列(field programmable gate array, FPGA)芯片[19]作为核心控制器, 负责配置芯片的工作参数, 产生MIMOSA28芯片的工作时钟, 同时接收探测模块上的MIMOSA28芯片输出的数字信号并进行解析、对齐、串并转换、重新组装等操作. 组装后的数据在芯片数据(chip data)的基础上添加了探测模块的标志信息(ladder flag)、模块触发号(ladder trigger count)、模块帧号(ladder frame count)、模块数据长度(ladder data length)、模块数据结尾(ladder data end)和芯片的标志信息(chip flag), 构成的数据包格式如图3所示. 数据包采用TCP/IP协议, 通过千兆以太网传输到DAQ进行离线存储. 图 3 探测模块的数据经FPGA处理后的格式
图 3 探测模块的数据经FPGA处理后的格式Figure3. Format of the data of the detector module processed by FPGA.
读出控制板接收来自DAQ发送的启动和停止取数的控制命令, 并根据这个命令产生启动(START)或停止(STOP)信号, 然后通过START信号扇出板输出到每个探测模块的数字读出板, 控制每个数字读出板的起始与停止状态. 塑料闪烁体计数器将粒子穿过闪烁体产生的光信号通过光电转换等处理转变为脉冲信号, 该脉冲信号在Trigger信号扇出板内经过处理后变成数字信号, 然后扇出到每个探测模块的数字读出板, 作为触发信号被FPGA接收并处理. 时钟扇出板生成100 MHz的同步时钟信号用于同步每个数字读出板的工作状态.
DAQ采用慢控制协议发送启动和停止指令以控制数据读取的进程, 同时通过用户数据报协议(user datagram protocol, UDP)传输探测模块上的MIMOSA28芯片的配置数据和电子学的配置数据. DAQ还通过TCP/IP协议接收数字读出板发出的数据包, 并将它们存储到硬盘上以用于离线分析.
2
2.3.带触发标记的连续读出方法
由MIMOSA28芯片的逐行扫描机制和内存管理机制[15]可知, 当带电粒子击中芯片使像素着火时, 若击中位置位于当前扫描位置之后, 则本次扫描可以记录着火像素的信息, 正在存储的这一帧数据(第m帧)就是当前击中所对应的数据; 若击中位置位于扫描位置之前, 则本次扫描无法记录该着火像素的信息, 该着火信息将在下一次扫描中记录, 则下一次扫描存储的数据(第m+1帧)为本次击中事例对应的数据, 因此对每个击中事例, 理论上需要分析连续两帧(第m帧和第m+1帧)数据以找到对应的击中信息.为了确保不丢失数据, 同时又能实现探测器模型中不同模块的事例对齐, 研究并实现了带有触发标记的连续读出方法. 连续读出的流程如图4所示.
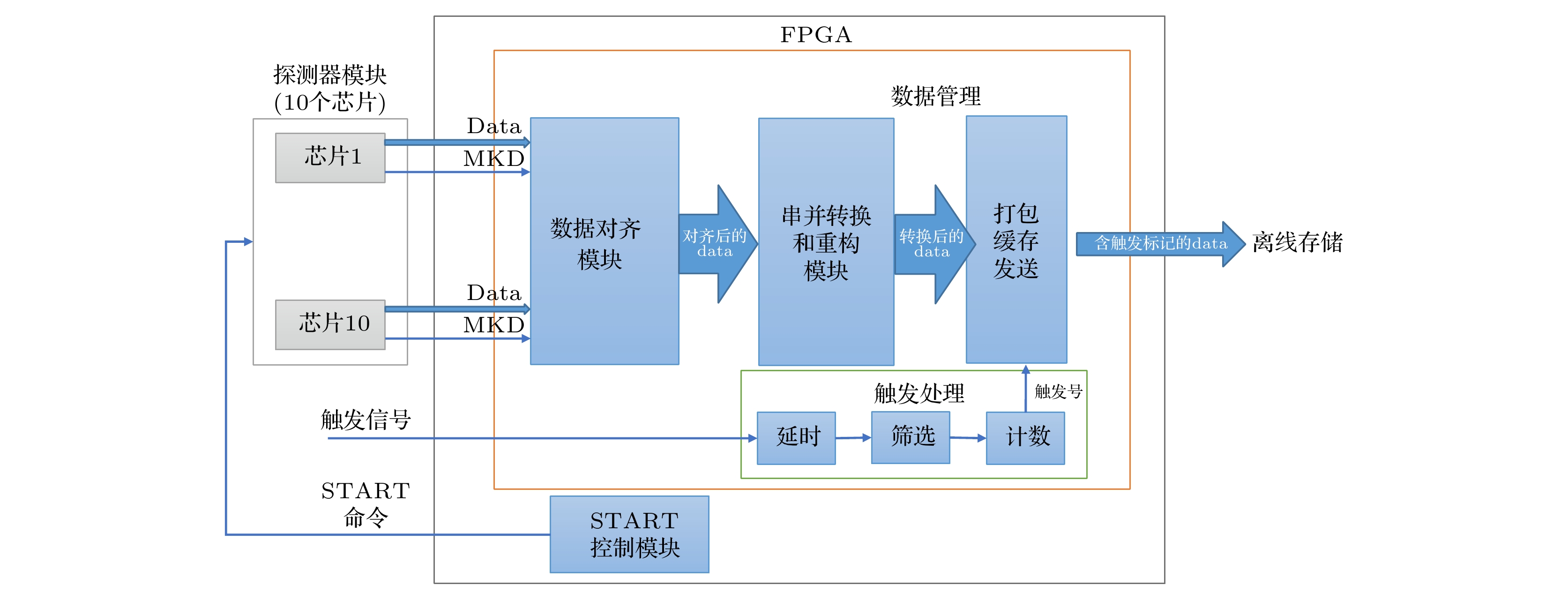 图 4 连续读出流程
图 4 连续读出流程Figure4. Process of continuous readout.
启动读数进程之后, 探测模块上10个芯片同时输出数据. 由于探测模块上芯片的位置与数据读出模块的距离不相等, 数据并不是严格地同时到达FPGA. 为了保证能够正确对数据进行重构, 在START命令发出后, FPGA先以MIMOSA28芯片的信号标记位(MKD)作为每帧数据的起始标志, 接收每个MIMOSA28芯片传来的数据, 然后根据每个芯片MKD的到达时间对先到的芯片数据进行延时(一般为1个时钟周期), 从而将10个芯片数据对齐. 对齐后的芯片数据在FPGA内部进行串-并转换和重构操作. 与此同时, 通过计算找到触发信号与对应数据帧的MKD的时间关系. 当系统判断接收到了有效触发信号, 触发号加1, 并根据预先计算出的时间关系找到该触发对应的数据帧, 将触发号添加到数据帧里, 从而使数据与触发对应起来. 如果没有接收到触发信息, 也将在数据帧里添加触发号, 但触发号不变. 通过这样的方式既实现了数据的连续读出, 又保证了触发与数据的对应关系, 实现了探测器模型不同模块间的事例对齐, 便于后续的数据分析.
3.1.触发逻辑测试
为了验证触发读出逻辑的正确性, 采用信号发生器产生的脉冲信号(频率为5 kHz, 幅度为–600 mV, 脉宽为100 ns)作为触发信号, 同时对五层探测模块进行测试, 每个模块都获取200万帧的数据. 图5为测试结果, 其中横坐标为触发号, 纵坐标为每次触发模块2—模块5的数据帧号分别与模块1的数据帧号相减得到的值. 根据测试结果, 不同探测模块的数据中, 每次触发对应的数据帧号随机出现相等或差值为1的情况, 这是由于触发扇出板所扇出的信号实际上不是理想对齐的信号, 并且由于线路延时的影响, 触发信号到达FPGA的时间有细微差别, 在逻辑判断时, 触发号变化会有先后顺序, 时间间隔为纳秒级(远小于数据帧的间隔185.6 μs). 当触发号在两帧数据交界附近变化时, 在FPGA内进行触发号写入, 可能会出现同一触发号写在不同的两帧(帧号连续)数据上, 从而导致同一触发号对应的帧号差值出现1. 但考虑到读出及触发标记机制(2.3节)、硬件延时固定的因素, 即使在下一帧数据中触发号又发生了变化, 该触发号对应的帧号最多差1或恢复为0, 不会出现差2或不断增加的情况. 结合MIMOSA28芯片的内存管理机制, 若每个事例都取连续三帧(有效触发对应的前一帧, 当前帧和后一帧)的数据进行分析, 上述帧号差1的情况将不会造成数据丢失, 并且能够实现不同模块间的事例对齐. 图 5 每次触发模块2—模块5对应的数据帧号与模块1对应的数据帧号的差值
图 5 每次触发模块2—模块5对应的数据帧号与模块1对应的数据帧号的差值Figure5. Difference of the frame number between module 2– module 5 and module1 corresponding to the same event (trigger).
2
3.2.噪声测试
33.2.1.阈值扫描
噪声水平是探测模块的一个重要的参数, 通过芯片甄别器的阈值扫描可以获取探测模块上芯片的噪声水平. 设置合适的甄别器阈值可以有效降低芯片的噪声计数, 同时又能保证探测模块不损失效率. 室温下将芯片每列的甄别器设置不同的阈值, 测试芯片像素在不同阈值下的噪声响应, 以获得芯片的传输曲线、暂态噪声(temporal noise, TN)、固定模式噪声(fixed pattern noise, FPN)以及甄别器DAC的参考值等. DAC的扫描范围为0—255, 扫描步长为5. 对芯片所有列的噪声传输曲线采用正态分布的累积分布函数进行拟合. 正态分布的累积分布函数为
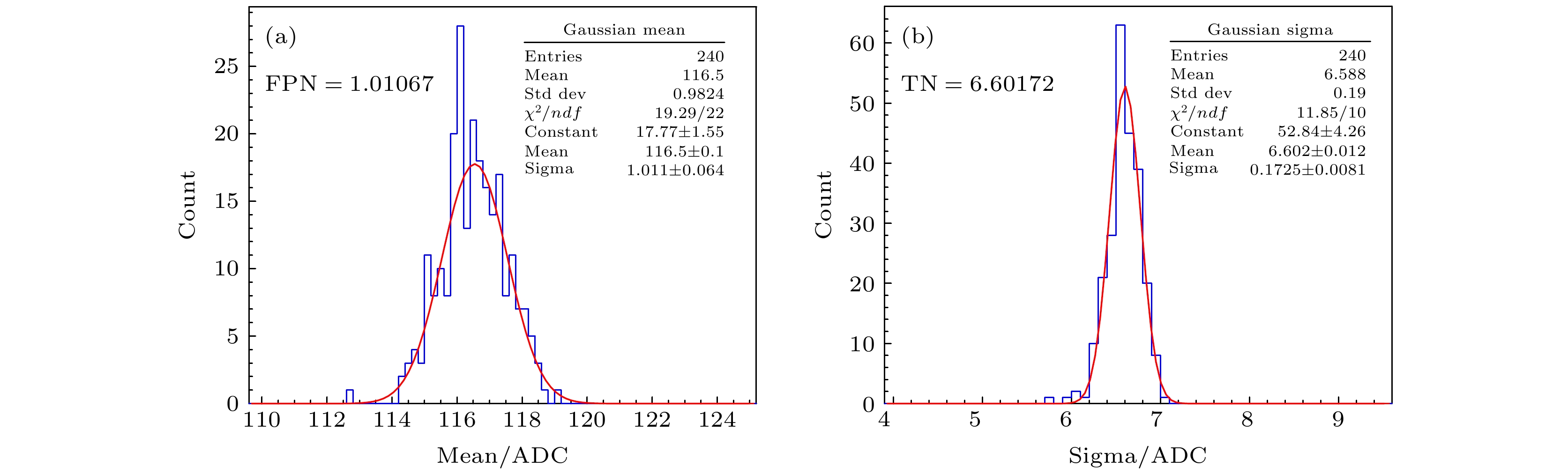 图 6 探测模块的噪声水平(1 ADC=0.25 mV) (a) 传输曲线的Mean值分布(FPN为1.01067 ADC, 转换成电压值为0.253 mV); (b) 传输曲线的Sigma值分布(TN为6.60172 ADC, 转换成电压值为1.65 mV)
图 6 探测模块的噪声水平(1 ADC=0.25 mV) (a) 传输曲线的Mean值分布(FPN为1.01067 ADC, 转换成电压值为0.253 mV); (b) 传输曲线的Sigma值分布(TN为6.60172 ADC, 转换成电压值为1.65 mV)Figure6. Noise level of detector module (1 ADC unit = 0.25 mV): (a) Mean distribution of transmission curve (FPN is 1.01067 ADC, converted into the voltage is 0.253 mV); (b) Sigma distribution of transmission curve (TN is 1.01067 ADC, converted into the voltage is 1.65 mV).
芯片的噪声(σ)定义为
3
3.2.2.误击中率
FHR定义为在不同阈值条件下测得FHR随阈值的变化如图7所示. 可以看出, 芯片的误击中率随着阈值的增大呈下降趋势, 阈值设置为4σ及以上时(n ≥ 4), 每帧每个像素的误击中率低于

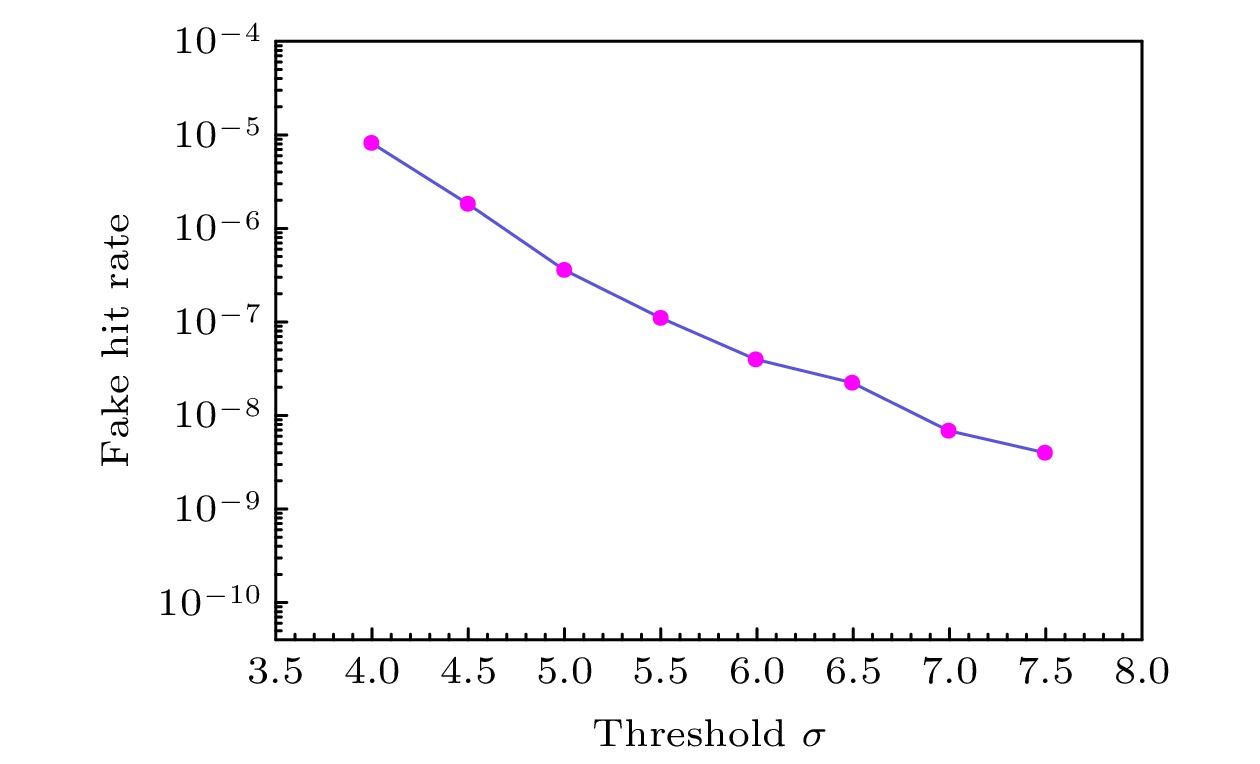 图 7 误击中率随阈值的变化
图 7 误击中率随阈值的变化Figure7. FHR as a function of the threshold.
2
3.3.探测模块响应和成像性能测试
为了验证探测模块的功能是否正常, 根据阈值扫描和误击中率测试的结果对MIMOSA28芯片的甄别器设置合适的阈值
放射源放置在第五层模块的前方, 电子束经准直圆孔后连续穿过5层探测模块, 最后进入第一层后方的闪烁体计数器, 闪烁体计数器的输出信号作为五层探测模块的触发信号. 在进行击中挑选时, 根据3.1节的触发逻辑测试结果, 分析每次触发对应的前一帧和后两帧的数据. 五层探测模块的击中挑选结果如图8所示. 可以看到, 距离放射源最近的模块5和模块4上有一个明显的亮斑, 这是电子通过准直圆孔在芯片上所成的像, 另外由于90Sr衰变产生的电子能量较低, 受多次库仑散射的影响, 距离放射源越远的探测模块, 击中数目逐渐变少, 因此准直孔的像逐渐变得模糊. 但距离放射源最远的模块1上也显示出一个近似圆形的阴影, 这是由于产生触发信号的闪烁体距离模块1最近, 模块1上击中粒子的位置受触发闪烁体位置和尺寸的影响最大, 该阴影代表了闪烁体的位置和尺寸. 此测试结果表明探测模块能够正常工作, 且成像性能良好.
 图 8 五层探测模块击中挑选结果(右侧色温表给出像素被击中的次数)
图 8 五层探测模块击中挑选结果(右侧色温表给出像素被击中的次数)Figure8. Hit selection of the five-layer detection module (The rainbow indicates the number of times a pixel being hit).
2
3.4.击中重建算法
33.4.1.Charge sharing效应
由于MIMOSA28芯片的PN结工作在非耗尽模式下, 带电粒子穿过MIMOSA28芯片的灵敏区所产生的电子-空穴对通过热扩散的方式被周围的数个像素收集, 使像素着火, 形成簇团, 这就是电荷分享效应[20]. 相比于每次事例仅有单个像素着火的情况, 利用着火簇团的信息重建粒子在芯片上的击中位置有利于提高芯片的空间分辨率. 由于MIMOSA28芯片输出数字信号, 只能获得像素是否着火的信息, 在进行击中位置重建时所有着火像素是平权的, 我们研究了不同算法如相邻法和比较法来重建簇团的几何中心从而重建粒子在芯片上击中位置.3
3.4.2.重建算法—相邻法和比较法
相邻法的实现流程如图9所示, 其中白色方块表示未着火的像素, 蓝色方块表示着火但未被标记的像素, 黄色方块表示着火且标记过的像素. 按照图9(a)—图9(d)的顺序, 首先确定一个着火像素, 将其标记为hit_1, 以这个像素为基准寻找其周围(上下左右)相邻的着火像素, 同样标记为hit_1, 然后再以相邻像素为基准, 继续寻找周围的相邻着火像素, 一直迭代下去直到找完hit_1的所有相邻的着火像素, 再依据中心法把hit_1的着火像素坐标重建为击中位置, 然后重复hit_1着火像素寻找及击中位置重建的过程, 寻找并重建该帧数据中其他击中信息(hit_2, hit_3, ……).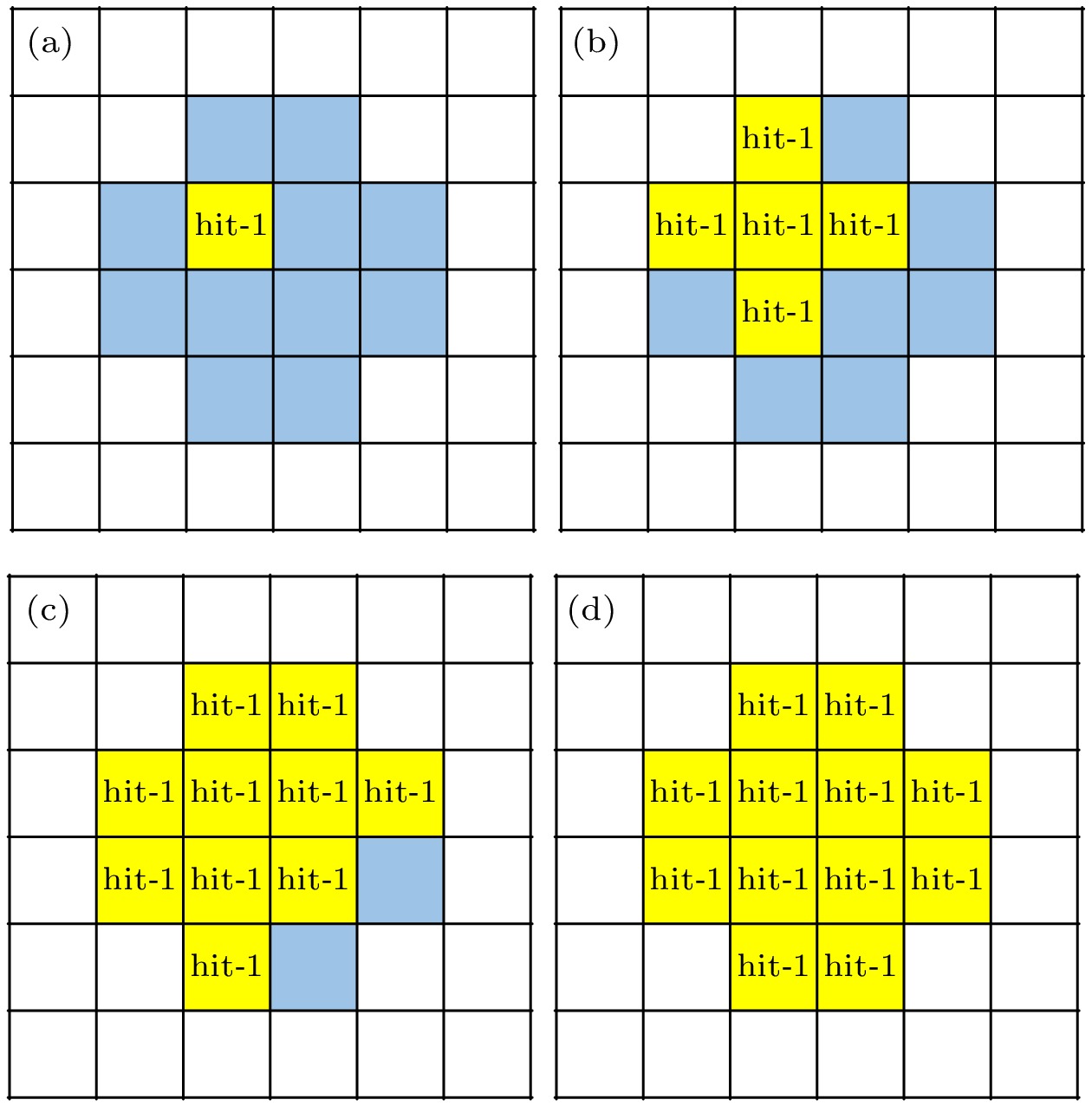 图 9 相邻法实现流程图
图 9 相邻法实现流程图Figure9. Flow chart of adjacent method.
比较法是将所有着火像素的行列坐标放入数组, 遍历数组中的像素, 将每一个像素与它之后的所有像素两两比较, 若比较判断两个像素相邻则有四种情况, 如图10所示, 方块颜色的含义同图9.
 图 10 比较法中相邻像素的四种标记情况
图 10 比较法中相邻像素的四种标记情况Figure10. Four marking situations of adjacent pixels in the comparison method.
若两个像素都未标记, 则新建一个标记, 将它们标记为hit_1, 如图10(a)所示; 若两个像素一个有标记(标记值为hit_i)另一个未标记, 则将未标记的像素标记为hit_i, 如图10(b)所示; 若两像素的标记值相等, 则不需处理, 如图10(c)所示; 若两像素标记值不同(标记值分别为hit_j, hit_k, 且j < k), 则将标记值为hit_k的像素全标记为hit_j, 如图10(d)所示. 像素遍历完毕之后, 根据中心法分别把标记号相同的着火像素重建成坐标.
假设每个击中的簇团有M个着火像素, 一帧数据中有N个击中, 则两种算法的复杂度如表1所列.
| 相邻法 | 比较法 | |
| 循环次数 | $4 \times M \times N$ | $({ { {M^2} \times {N^2} - M \times N} })/{2}$ |
| 时间复杂度T(N) | O(N) | O(N2) |
表1两种算法的复杂度比较
Table1.Comparison of the complexity of the two algorithms.
采用90Sr放射源测试两种算法, 得到的cluster size分析结果相同, 如图11所示, 验证了cluster重建算法的有效性. 从图11中可以看出, 每个击中所引起的着火像素数的平均值为2.562. 在M = 2.562的情况下, 经分析计算, 当N ≥ 4时, 相邻法能够更快地找到所有着火像素, 反之比较法更快.
 图 11 90Sr放射源测试得到芯片上cluster size的分布
图 11 90Sr放射源测试得到芯片上cluster size的分布Figure11. Cluster size distribution on the chip tested by 90Sr source.

