Fund Project:Project supported by the National Natural Science Foundation of China (Grant Nos. 41875034, 41627807, 41975045)
Received Date:26 October 2020
Accepted Date:18 December 2020
Available Online:20 April 2021
Published Online:05 May 2021
Abstract:Investigation of cloud microphysical is of great significance in deepening the understanding of the radiation energy budget, water cycle process, and precipitation mechanism, and improving the scientificity and effectiveness of artificial precipitation. Especially under the action of turbulence, in addition to shear and inertia, the turbulence in the cloud will accelerate the collision of cloud droplets through vortex superposition. The above process will further complicate the cloud microphysical characters. At present, the methods of measuring cloud microphysical parameters based on light scattering, collision and imaging theories encounter bottlenecks: the inversion process needs to make the assumptions about cloud droplet spectrum and particle characteristics, the impact process will destroy particle characteristics, and the three-dimensional characteristics of cloud particles cannot be obtained. Because of its many advantages, such as fast, real-time, non-destructive, non-invasive, high-resolution, full-field optical measurement, etc., in-line digital holographic interferometry is considered as a new potential tool for the dynamical measurement of cloud microphysical property. In particular, the mutual interference between the particle image and twin image is small under far-field recording conditions. In this paper, the measurement method of the on-line digital holographic interferometry based on interference theory, combining optical information processing, depth of field compression, and gray gradient variance technology of fusion holograms, is investigated. This method, with a z-axis position accuracy of 0.01 mm and system resolution of 2 μm, is employed for simultaneously and finely detecting the cloud droplet spectrum, cloud particle diameter, and number concentration. In the experiment, the liquid droplet with a median diameter of 3.9 μm, produced by the ultrasonic atomizer, is used as an example of the cloud particle. The measurement results are consistent with realistic scenario. By using a high speed charge coupled device or complementary metal oxide semiconductor camera, this method can solve the technical bottleneck of three-dimensional fine characteristics of cloud particle in airborne measurement by using cloud droplet spectrometer. It can provide effective support for the research of liquid water in the cloud, entrainment, condensation, collision, and temporal and spatial evolution laws. In addition, it has reference significance for the study of particle dynamics. Simultaneously, this method provides a feasible solution for the measurement of cloud in land-based and airborne platforms. Keywords:cloud microphysics/ cloud droplet spectrum/ particle diameter/ number concentration/ digital holographic interferometry
式中, G为总灰度梯度, $\overline G $为平均灰度梯度, N为全息图各粒子区域像素点总数. 利用该方法粒子z轴位置精度可达到0.01 mm.
3.实验系统图1给出了同步测量云微物理参数的同轴DHI光路. 为了减小光源对所在环境中湍流场的影响, 采用光纤耦合输出的532 nm激光作为测量光源, 利用单模光纤将激光引入光路, 以减小光源尺度. 光束传播通过透镜组(L1和L2)以产生准直扩展光束, 两透镜组成发射端(外形尺寸为Φ 30 mm × 60 mm). 云中的粒子产生的衍射光作为物光束, 未受干扰的光波作为参考光束. 在光束路径中使用0.5倍的4f系统(L3和L4), 以提高z方向的测量精度. 采用CMOS (Basler公司的acA3800-14 um型相机, 外形尺寸为29 mm × 29 mm × 41 mm, 帧速率为14 f/s, 3840 × 2748 (W × H)像素, 像素尺寸为1.67 μm × 1.67 μm)记录物光束与参考光束干涉形成的条纹, 进而形成数字全息图. 偏振器P用于产生线偏振光. 图 1 同步测量云微物理参数的同轴DHI实验光路 Figure1. Experimental setup for simultaneous measurement of cloud microphysical parameters.
实验在恒温恒湿中进行, 温度为(23 ± 2) ℃, 湿度为30%. 使用图1所示的同轴DHI光路, 每秒记录14幅全息图, 每幅全息图的曝光时间为38 μs. 利用超声波雾化器产生的中值直径为3.9 μm的液滴粒子作为液相云粒子的模拟. 采用标准分辨率板USAF1951与标准直径(5 μm)空心玻璃球分别标定实验系统的分辨率与粒子位置精度. 4.分析与讨论根据CMOS芯片与像素尺寸, 以及(2)式和(3)式, 为了保证在采样距离内系统分辨率都高于10 μm, 实验采样体积选择为6.4 mm × 4.6 mm × 100 mm (xyz). 根据(2)式可知, 在z轴上最短采样距离为20 mm, 距离越远系统分辨率越低. 将USAF1951分辨率板分别置于距离CMOS芯片20 mm和35 mm处拍摄数字全息图, 重建获得如图2所示的再现图像. 从图2(a)和图2(b)中可清楚分辨虚线圆中第7-6组和7-1图形, 即分辨率分别为2.19 μm和3.47 μm. 图 2 USAF1951标准分辨率板的再现全息图 (a) 采样距离为20 mm; (b) 采样距离为35 mm Figure2. Reconstructing hologram of USAF1951 standard resolution plate at (a) 20 mm and (b) 35 mm.
将标准直径为5 μm的空心玻璃球放入蒸馏水中充分搅拌均匀, 在相同采样条件下获得多幅数字全息图, 图3给出了单粒子的时序数字全息图, 且图3中每张全息图都可数值重建出一组光路中粒子群的三维坐标, 在时间序列上依次选取多张全息图就可以建立三维位置随时间改变的粒子运动轨迹. 采用卷积法数值重建后, 利用比较图像融合法结合灰度梯度方差法确定粒子在z轴上的距离. 图像融合后选取1 mm距离中的101幅再现全息图进行计算, 它们的灰度梯度方差如图4所示, 需要对识别出的粒子区域进行灰度梯度的计算, 利用(4)式对所得梯度求方差, 方差最大点为最佳聚焦位置. 图4中单峰对应的全息图即为粒子的z轴位置, 则位置精度为0.01 mm. 图 3 单粒子的时序数字全息图 Figure3. Digital holograms of single particle at different times
图 4 融合全息图的灰度梯度方差分布 Figure4. Gray gradient variance distribution of fusion hologram

 图 1 同步测量云微物理参数的同轴DHI实验光路
图 1 同步测量云微物理参数的同轴DHI实验光路 图 2 USAF1951标准分辨率板的再现全息图 (a) 采样距离为20 mm; (b) 采样距离为35 mm
图 2 USAF1951标准分辨率板的再现全息图 (a) 采样距离为20 mm; (b) 采样距离为35 mm 图 3 单粒子的时序数字全息图
图 3 单粒子的时序数字全息图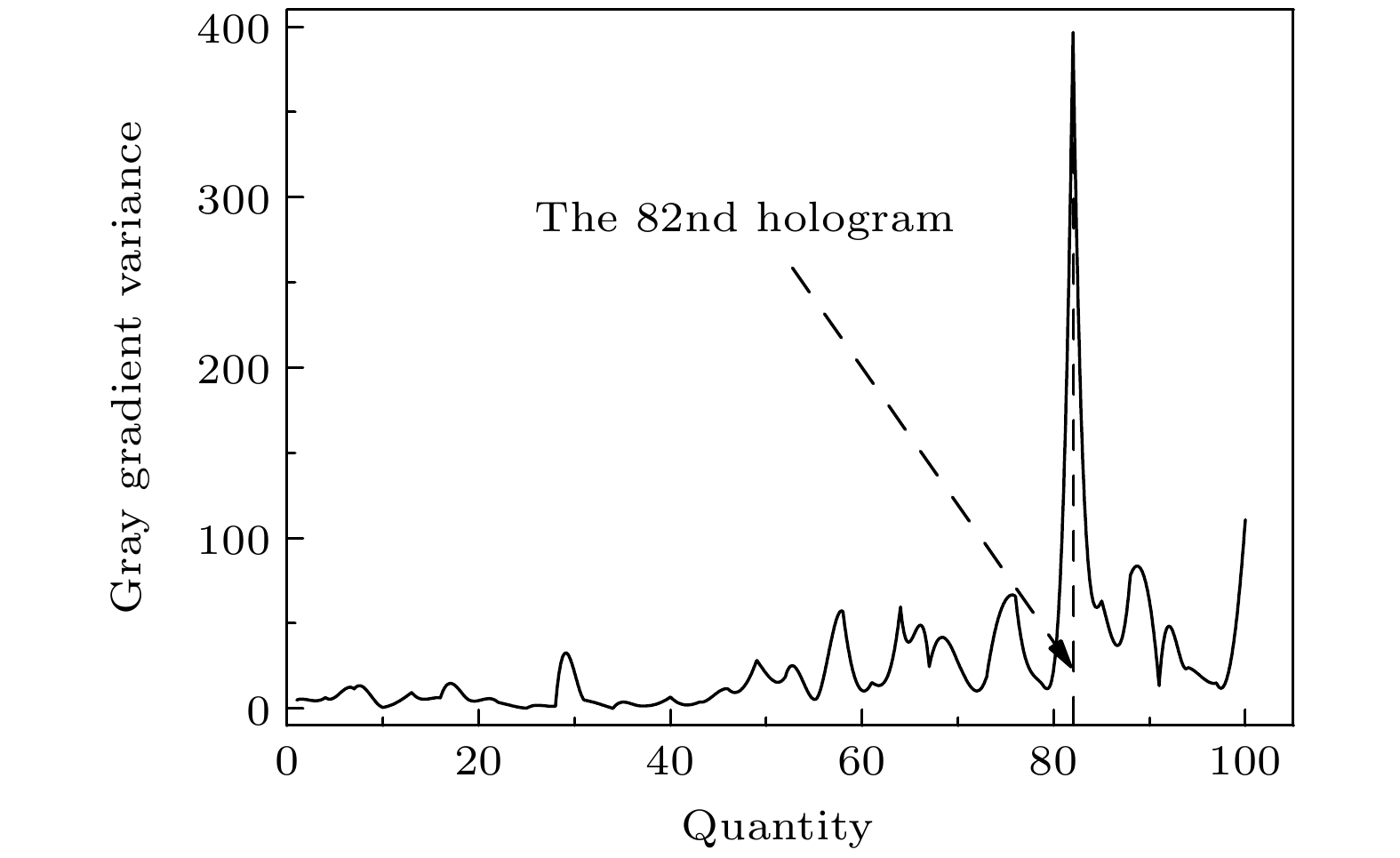 图 4 融合全息图的灰度梯度方差分布
图 4 融合全息图的灰度梯度方差分布 图 5 xy平面内位置坐标与粒子尺寸确定
图 5 xy平面内位置坐标与粒子尺寸确定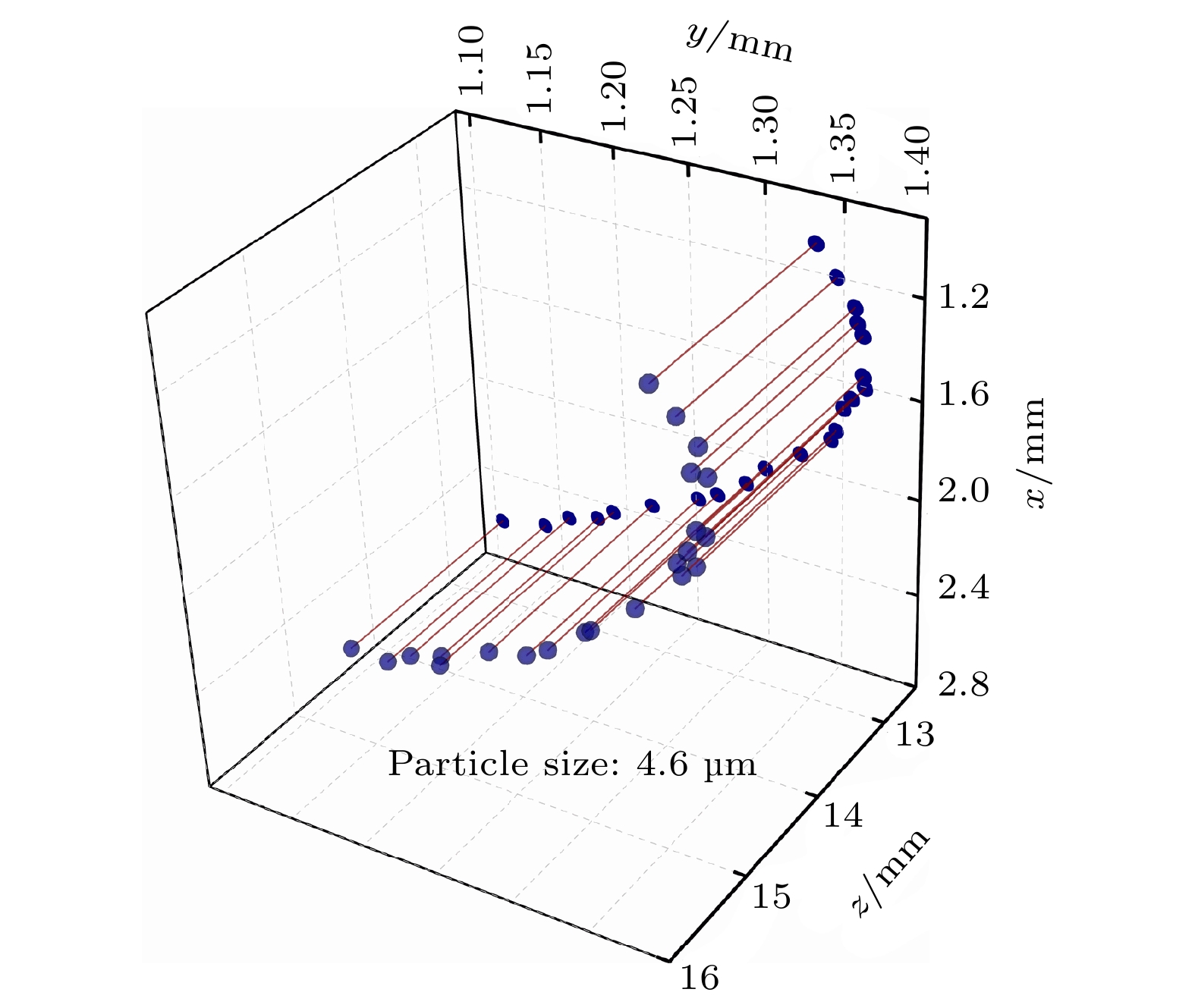 图 6 单粒子的三维运动轨迹
图 6 单粒子的三维运动轨迹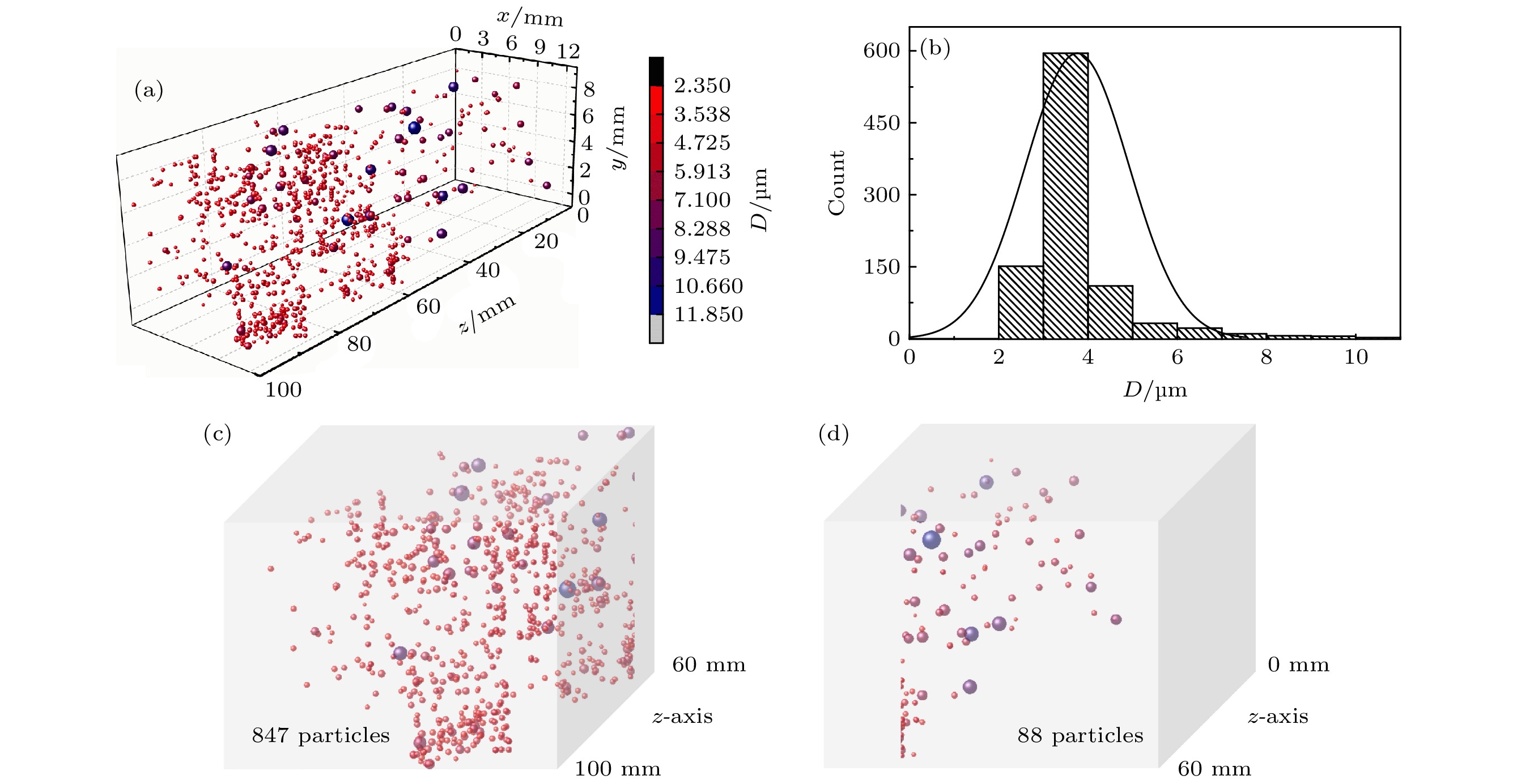 图 7 中值直径3.9 μm的液滴粒子测量结果 (a) 粒子分布; (b) 粒子谱; (c) z轴60—100 mm数浓度; (d) z轴0—60 mm粒子谱
图 7 中值直径3.9 μm的液滴粒子测量结果 (a) 粒子分布; (b) 粒子谱; (c) z轴60—100 mm数浓度; (d) z轴0—60 mm粒子谱