Fund Project:Project supported by the National Natural Science Foundation of China (Grant No. 61701385), the Foundation of Equipment Pre-research Area of China (Grant No. 61406190121), and Pre-research Foundation of key laboratory (Grant No. 6142602200407)
Received Date:01 September 2020
Accepted Date:19 October 2020
Available Online:22 March 2021
Published Online:05 April 2021
Abstract: Moiré patterns formed by overlapping two circular gratings of slightly different pitches have been extensively used for measuring the two-dimensional (2D) and three-dimensional (3D) displacements. However, in the existing applications, Moiré patterns are analyzed based on geometric superposition, by which the 3D displacements cannot be instantaneously or simultaneously measured with a high accuracy. In this paper, radial shearing interferometry with double circular gratings of slightly different pitches is presented to realize the simultaneous measurement of 3D displacements. The measurement is based on the principle that Moiré patterns produced by radial shearing interferometry are determined not only by the 2D in-plane displacements, but also by the out-of-plane displacement that brings about a phase shift between Moiré patterns of +1 and –1 diffraction orders. First, the production mechanism of Moiré patterns by radial shearing interferometry is studied based on the scalar diffraction theory and the intensity distribution of Moiré fringes of +1 and –1 orders is derived to establish the exact analytic relations between Moiré patterns and 3D displacements. Second, on the basis of spectrum characteristics of circular grating, a semicircular ring filter is proposed for spatial filtering to realize the simultaneous imaging of Moiré fringes of +1 and –1 orders. Then, the algorithm to quantitatively extract 3D displacements from Moiré patterns is proposed and demonstrated by numerical simulation. In the algorithm, Moiré patterns in the rectangular coordinate system are transformed into the polar coordinate system and skeletons are extracted to determine the feature points of the bright fringes. The in-plane displacements can be solved by feature points of +1 or –1 diffraction order, and the out-of-plane displacement can be computed by the feature points of +1 and –1 diffraction orders in the same bright fringe. Finally, experimental results prove that the maximum absolute error and mean error for in-plane displacements are 4.8 × 10–3 mm and 2.0 × 10–4 mm respectively, and 0.25 mm and 8.6 × 10–3 mm for out-of-plane displacement. In conclusion, by using the Moiré patterns of +1 and –1 diffraction orders imaged by radial shearing interferometer with double circular gratings of slightly different pitches, the 3D displacement can be simultaneously measured. The method has the advantages of simple device, high measurement accuracy, non-contact and instantaneous measurement, which provides an important guidance for practically measuring the 3D displacements. Keywords:3 D displacements measurement/ radial shearing interferometer/ Moiré fringes/ circular gratings
通过数值模拟实验验证位移提取算法的精度. 在模拟实验中, 探测光的波长为632.8 nm, 两个圆光栅的周期分别为0.10 mm和0.11 mm. 通过(9)式和(10)式计算出$\left( {{\varDelta _x}, {\varDelta _y}, {\varDelta _z}} \right) = ( 0.2\;{\rm{ mm}}, $$ 0.1\;{\rm{ mm}}, 4.5\;{\rm{ mm}} )$的莫尔条纹如图7(a)所示. 图 7 提取特征点坐标的图像处理过程 Figure7. Process of image processing for extracting the coordinates of feature points.
首先, 将直角坐标系中的莫尔条纹转换到极坐标系中, 结果如图7(b)所示. 其次, 对图像进行二值化, 并提取出亮条纹的骨架, 结果如图7(c)和(d)所示. 然后, 保留其中一个亮条纹骨架, 数值为255的像素点位置即为亮条纹的特征点位置. 最后, 利用(13)—(15)式计算三维位移, 结果为(0.2003 mm, 0.0999 mm, 4.4417 mm), 绝对误差为0.1521%、0.1404%和1.2965%, 证明了该算法具有较高的精度.
4.实验及分析实验中光源选用He-Ne激光器(大恒光电DH-HN250), 探测光波长为632.8 nm. 圆光栅G1和G2(苏州聚芯微纳科技有限公司设计加工)的周期分别为0.10 mm和0.11 mm. 光栅G1的圆心固定于光轴上, 光栅G2安装在一个分辨率为0.001 mm的三维平移台(大恒光电GCM-TP)上进行平移. 4f系统中傅里叶变换透镜的焦距为150 mm, 孔径为38.1 mm(大恒光电GCL-010607). 用CCD相机(CCD: MER-630-16 GM/C, 镜头: Kowa LM12JC5MC)采集莫尔条纹, 由于镜头的放大作用, 每个像素的真实成像大小为0.05 mm. 首先对轴向位移测量进行实验研究. 保持平面内位移${\varDelta _x}$ = 0 mm、${\varDelta _y}$ = 0 mm不变, 轴向距离${\varDelta _z}$以间距1 mm由0 mm增加到15 mm, 实验获得的莫尔条纹如图8所示. 利用上述位移提取算法对莫尔条纹进行处理, 得到轴向位移${\varDelta _z}$变化如图9(a)所示, 图9(b)显示了轴向位移测量误差. 图 8 当${\varDelta _x}$ = 0 mm、${\varDelta _y}$ = 0 mm时实验得到的莫尔条纹图 Figure8. Moiré patterns captured by experiment when ${\varDelta _x}$ = 0 mm and ${\varDelta _y}$ = 0 mm.
图 9 当${\varDelta _x}$ = 0 mm、${\varDelta _y}$ = 0 mm时轴向位移测量结果 Figure9. Measurement results of out-of-plane displacement when ${\varDelta _x}$ = 0 mm and ${\varDelta _y}$ = 0 mm.
然后进行三维位移测量实验. 实验中位移${\varDelta _y}$ = 0.15 mm和${\varDelta _z}$ = 7.90 mm保持不变, ${\varDelta _x}$以间距0.05 mm从0 mm增加到0.35 mm. 实验得到的莫尔条纹如图10所示. 三维位移测量结果及测量误差如图11所示, 详细数据见表1. 图 10 当${\varDelta _y}$ = 0.15 mm、${\varDelta _z}$ = 7.90 mm时实验得到的莫尔条纹图 Figure10. Moiré patterns captured by experiment when ${\varDelta _y}$ = 0.15 mm and ${\varDelta _z}$ = 7.90 mm.
图 11 当${\varDelta _y}$ = 0.15 mm、${\varDelta _z}$ = 7.90 mm时三维位移测量结果 Figure11. Measurement results of 3D displacements when ${\varDelta _y}$ = 0.15 mm and ${\varDelta _z}$ = 7.90 mm.
Input/mm
Measured/mm
Absolute error/mm
Δx
Δy
Δz
Δx
Δy
Δz
Δx
Δy
Δz
0.00
0.15
7.90
–0.0030
0.1458
7.6978
0.0030
0.0042
0.2022
0.05
0.15
7.90
0.0488
0.1519
7.9868
0.0012
–0.0019
–0.0868
0.10
0.15
7.90
0.0980
0.1487
7.8158
0.0020
0.0013
0.0842
0.15
0.15
7.90
0.1512
0.1548
8.1415
–0.0012
–0.0048
–0.2415
0.20
0.15
7.90
0.2002
0.1458
7.6720
–0.0002
0.0042
0.2280
0.25
0.15
7.90
0.2496
0.1494
7.8628
0.0004
0.0006
0.0372
0.30
0.15
7.90
0.3014
0.1482
7.8078
–0.0014
0.0018
0.0922
0.35
0.15
7.90
0.3516
0.1544
8.1468
–0.0016
–0.0044
–0.2468
Mean error
0.0003
0.0001
0.0086
表1实验测量结果及误差 Table1.Measurement results and errors of experiment
由(13)—(15)式可知, 三维位移测量精度取决于光栅周期、探测光波长和特征点位置精度. 测量误差主要由坐标变换原点和亮条纹特征点的定位误差造成的. 实验结果中, 测量平面内位移的最大绝对误差为4.8 × 10–3 mm, 平均误差为2.0 × 10–4 mm, 轴向位移的最大绝对误差为0.25 mm, 平均误差为8.6 × 10–3 mm. 在已有的测量方法中, 平面内位移的最大绝对误差为5.25 × 10–3 mm[18], 轴向位移的最大绝对误差为0.22 mm, 平均误差为0.085 mm[20], 与该方法具有较高的测量精度. z轴测量误差大于x轴和y轴. 这是因为莫尔条纹的变化对x轴和y轴位移更敏感. 如图6和图8所示, 当z轴位移量在1个Talbot距离(15.8 mm)内变化时, 由相移引起的莫尔条纹变化十几个像素. 这导致该测量方法对z轴位移测量的灵敏度较低, 误差较大. 通过选择合适的光栅和提高图像采集设备的分辨率, 可以提高测量精度.






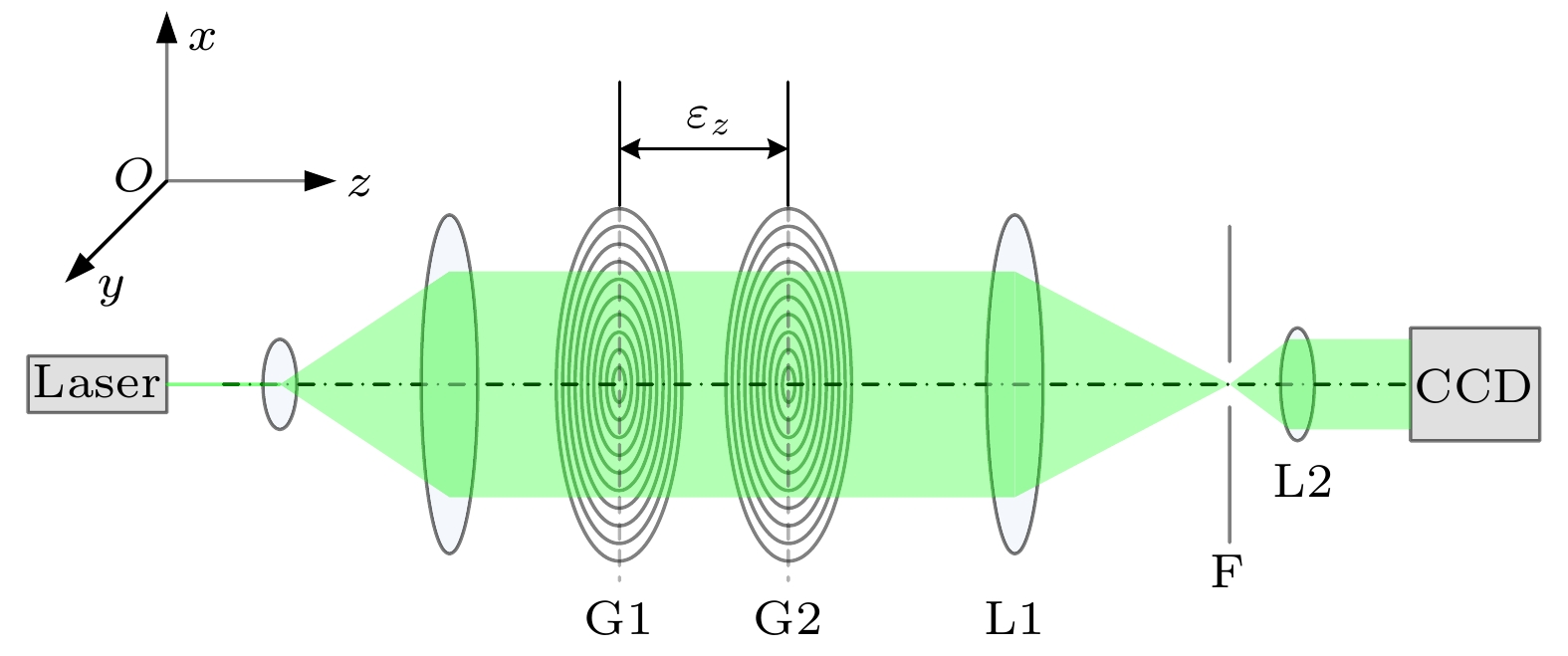 图 1 双圆光栅径向剪切干涉仪光路图
图 1 双圆光栅径向剪切干涉仪光路图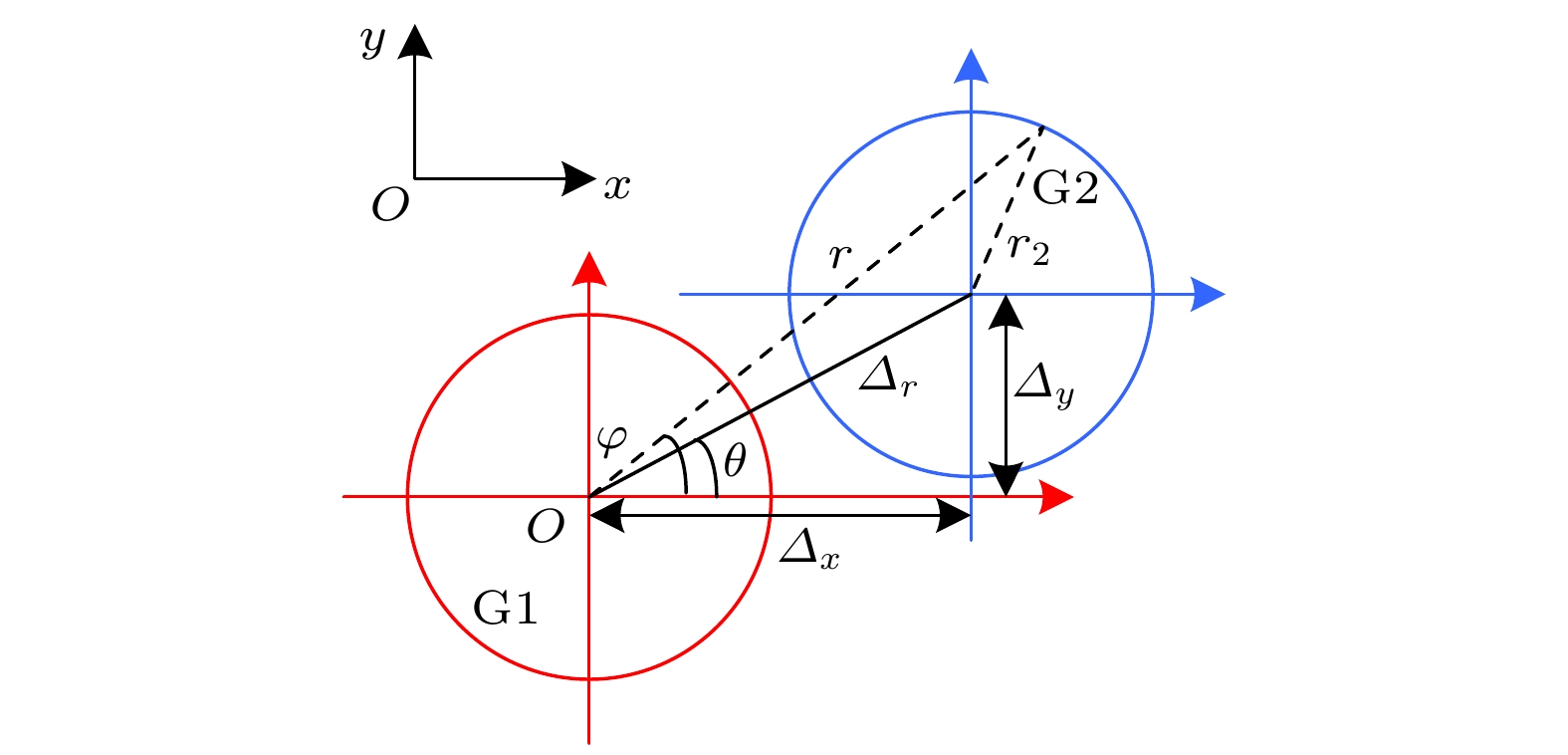 图 2 两个光栅圆心在
图 2 两个光栅圆心在













 图 3 双圆光栅的衍射过程
图 3 双圆光栅的衍射过程

















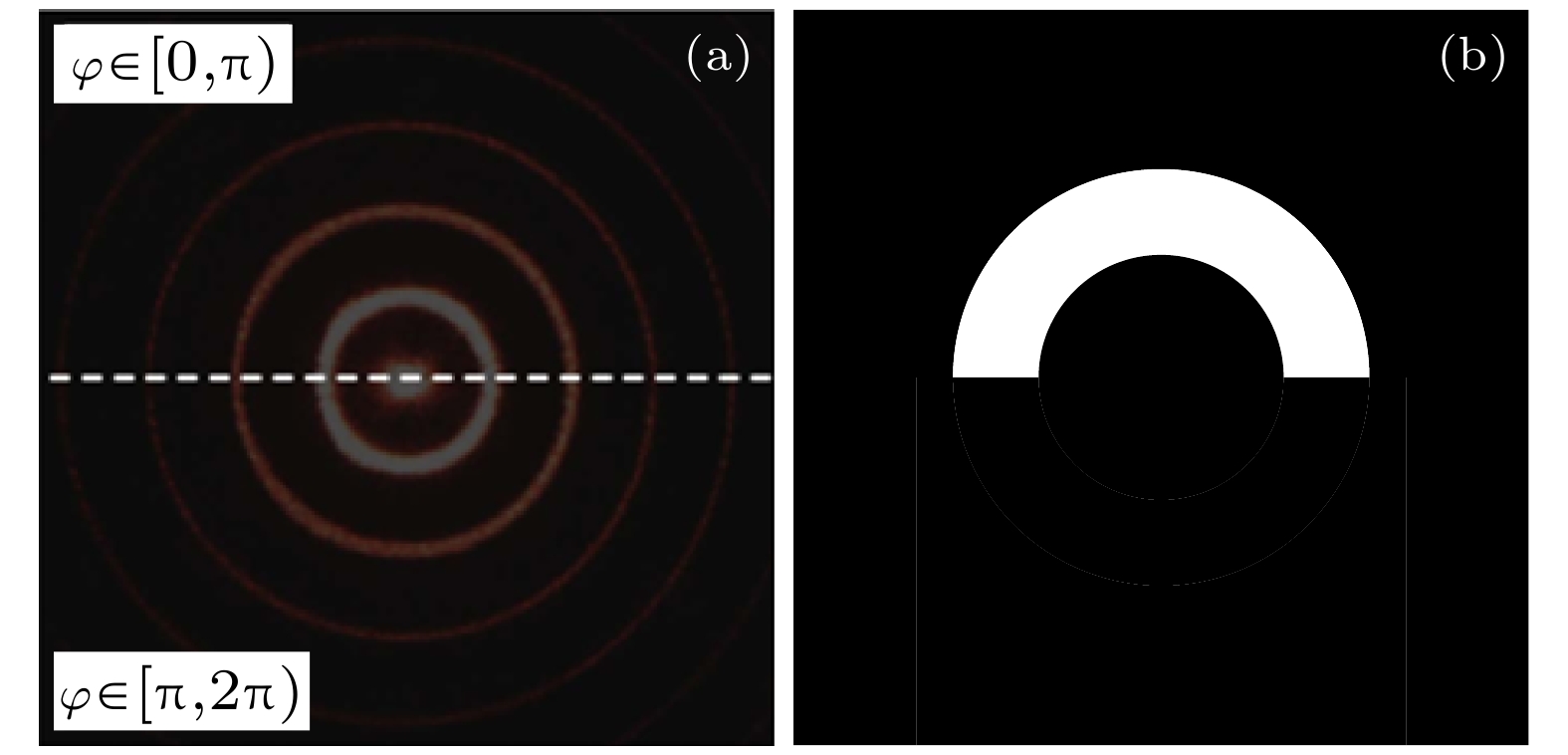 图 4 (a)双圆光栅的频谱分布; (b)实验中使用的半圆环形滤波器
图 4 (a)双圆光栅的频谱分布; (b)实验中使用的半圆环形滤波器












 图 5 数值模拟得到的不同位移量的莫尔条纹
图 5 数值模拟得到的不同位移量的莫尔条纹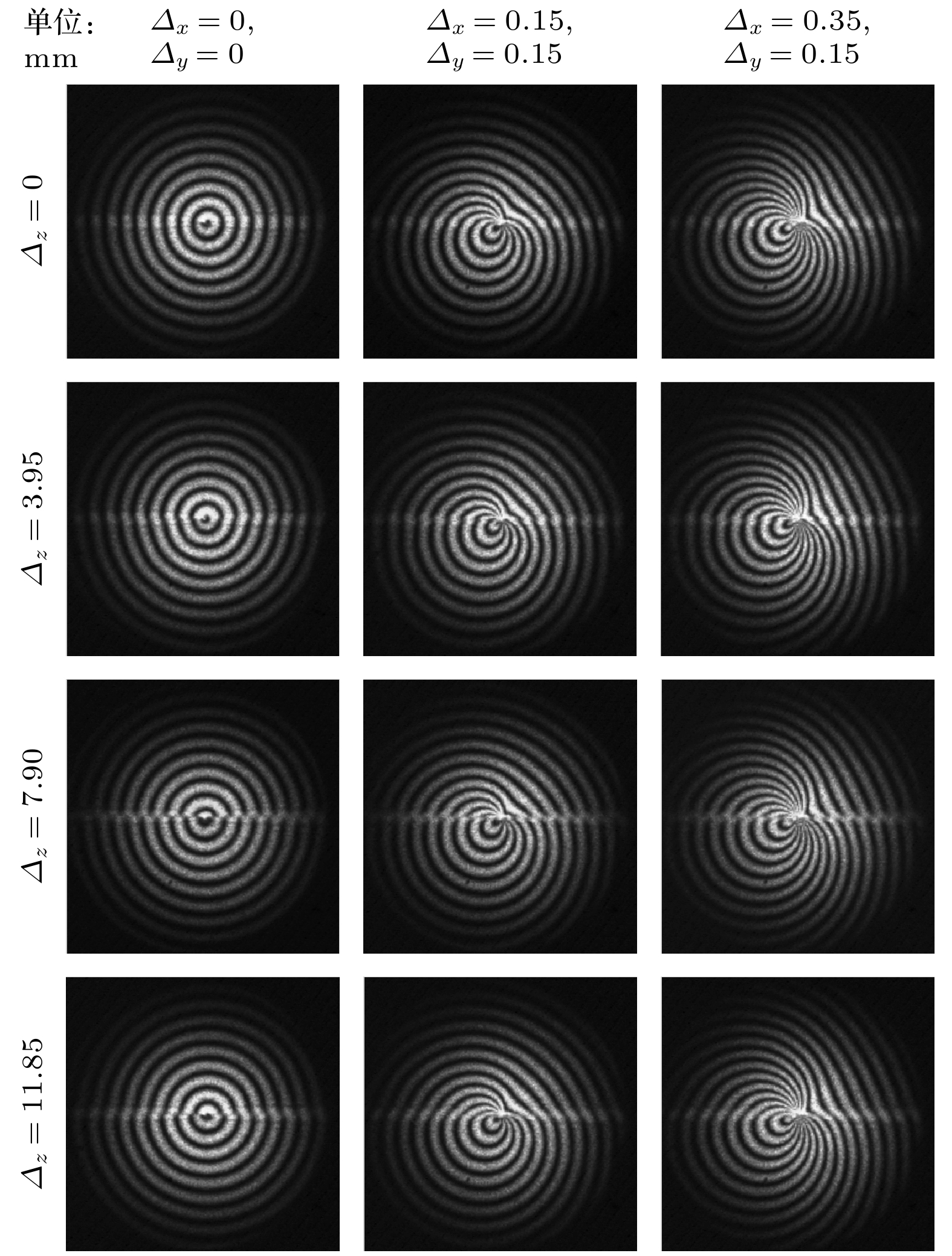 图 6 实验得到的不同位移量的莫尔条纹
图 6 实验得到的不同位移量的莫尔条纹













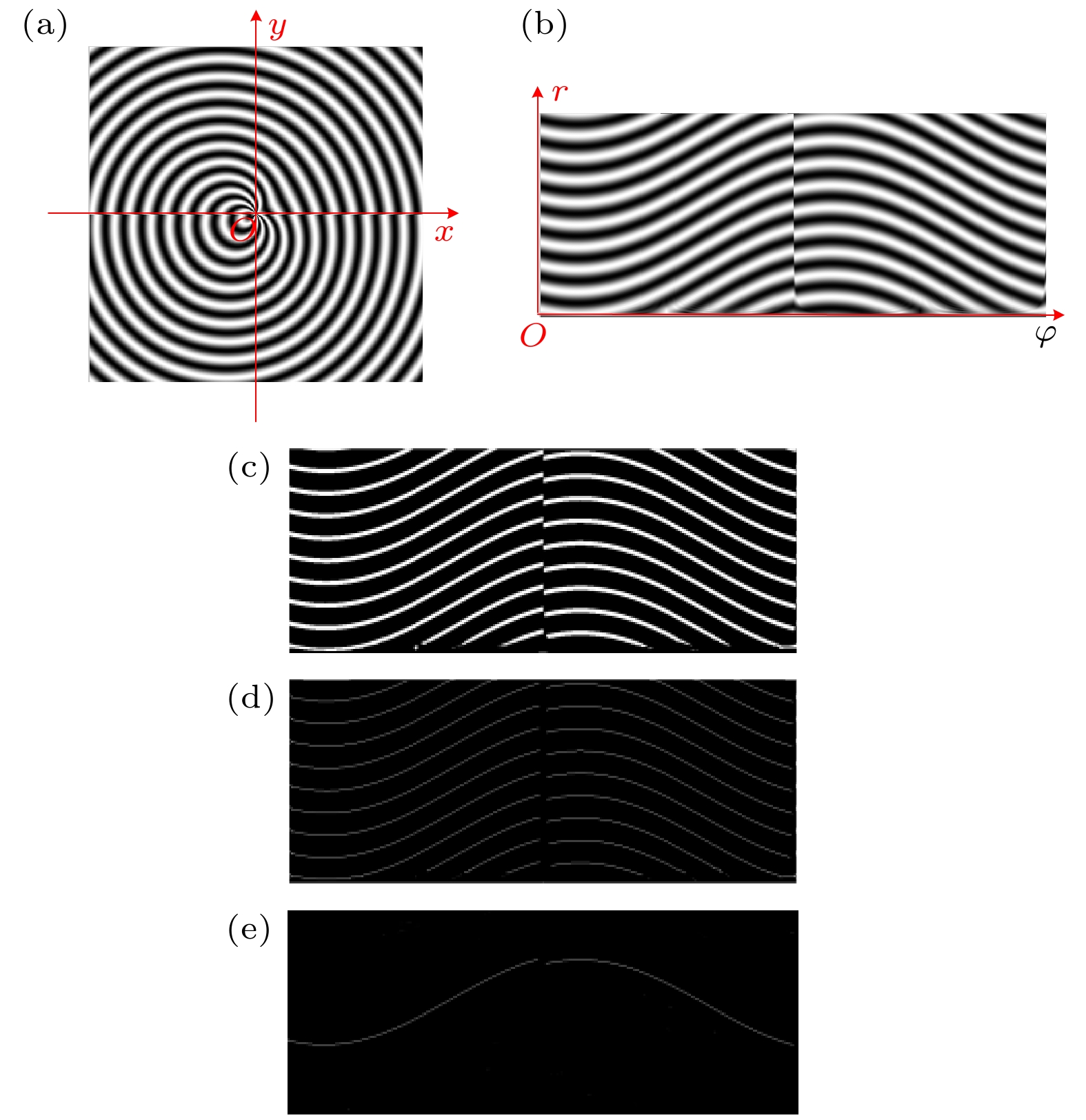 图 7 提取特征点坐标的图像处理过程
图 7 提取特征点坐标的图像处理过程



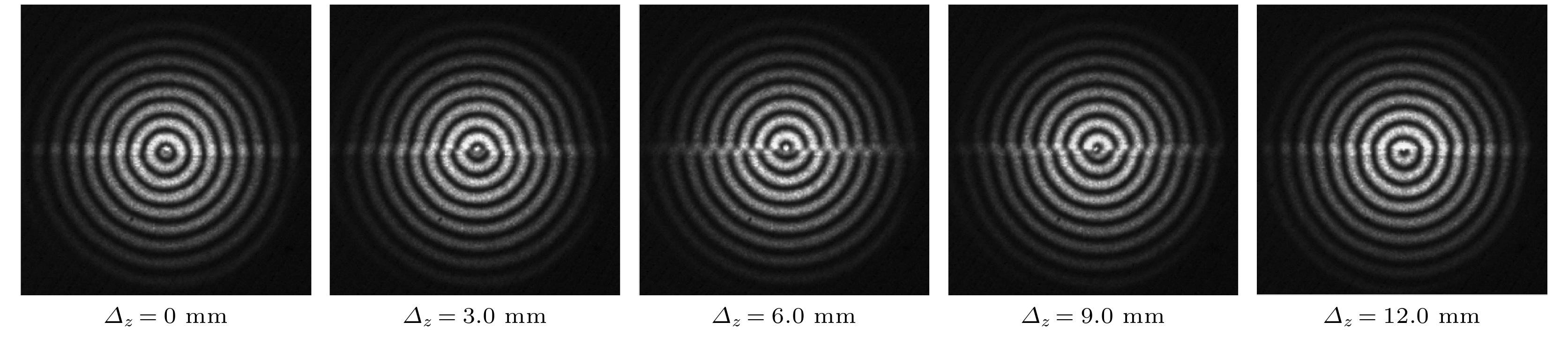 图 8 当
图 8 当



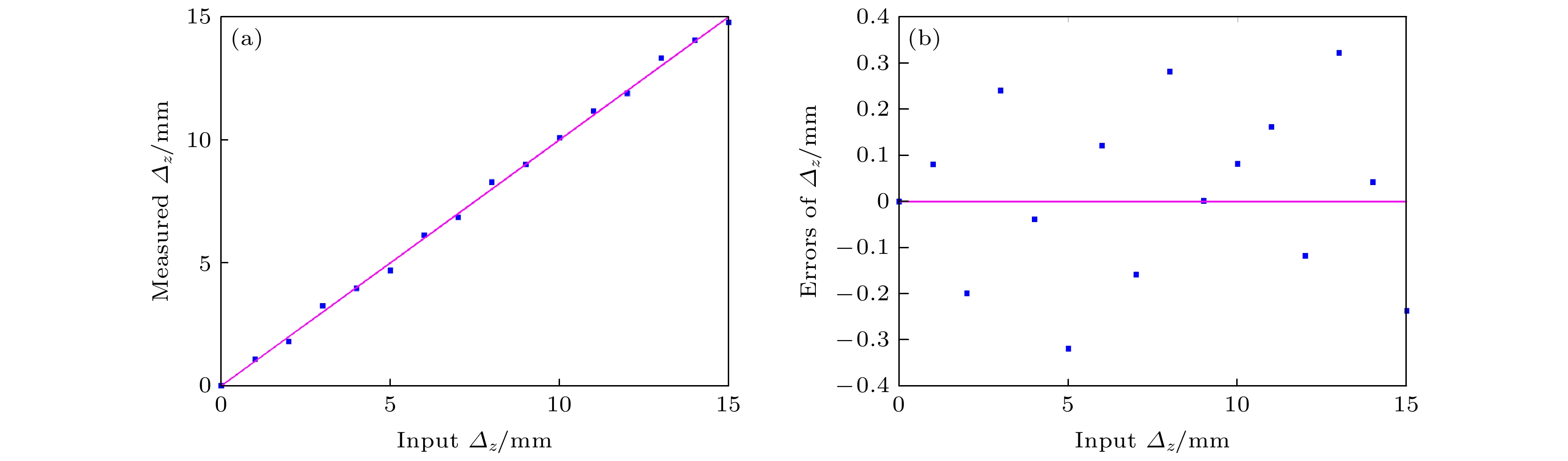 图 9 当
图 9 当






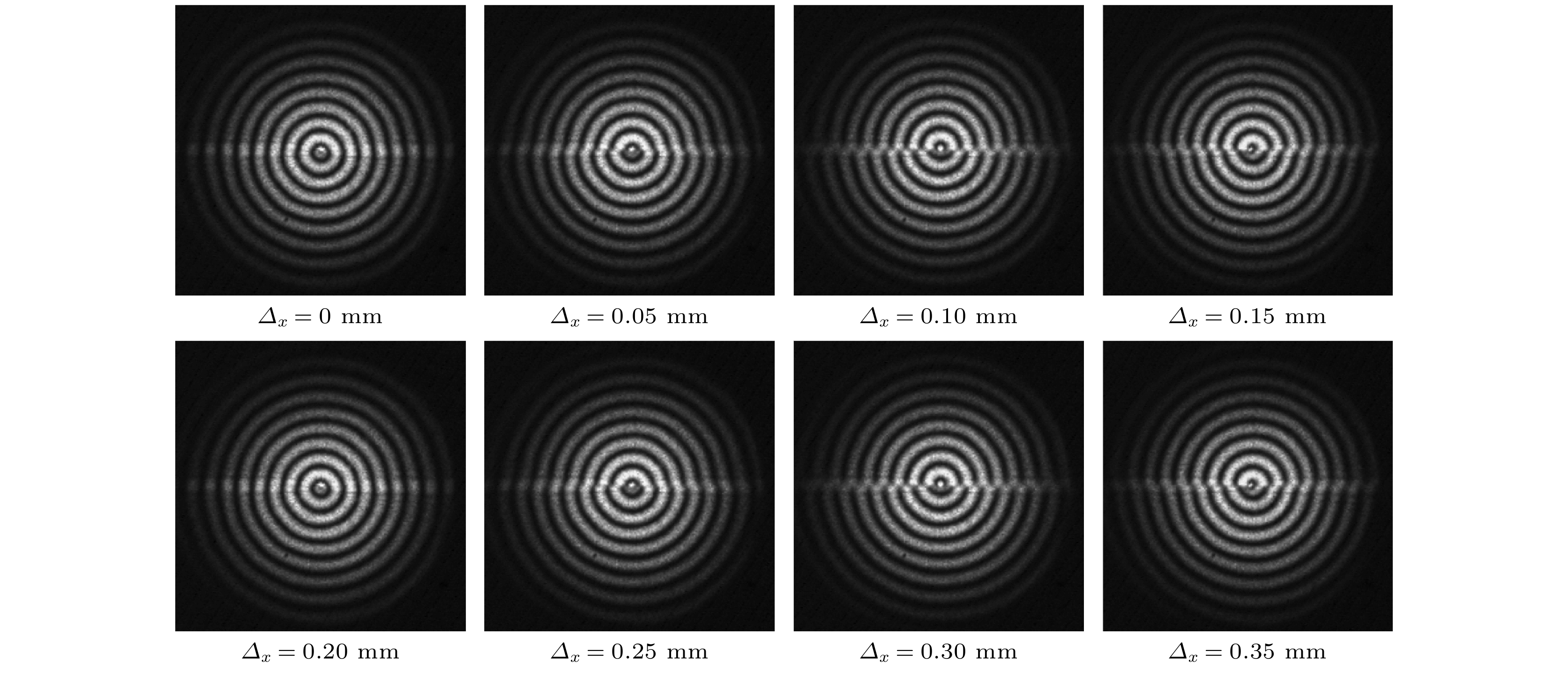 图 10 当
图 10 当



 图 11 当
图 11 当



