Fund Project:Project supported by the National Natural Science Foundation of China (Grant No. 61471039)
Received Date:18 August 2020
Accepted Date:23 September 2020
Available Online:22 February 2021
Published Online:05 March 2021
Abstract:The conventional phase retrieval wavefront sensing approaches mainly refer to a series of iterative algorithms, such as G-S algorithms, Y-G algorithms and error reduction algorithms. These methods use intensity information to calculate the wavefront phase. However, most of the traditional phase retrieval algorithms are difficult to meet the real-time requirements and depend on the iteration initial value used in iterative transformation or iterative optimization to some extent, so their practicalities are limited. To solve these problems, in this paper, a phase-diversity phase retrieval wavefront sensing method based on wavelet transform image fusion and convolutional neural network is proposed. Specifically, the image fusion method based on wavelet transform is used to fuse the point spread functions at the in-focus and defocus image planes, thereby simplifying the network inputs without losing the image information. The convolutional neural network (CNN) can directly extract image features and fit the required nonlinear mapping. In this paper, the CNN is utilized to establish the nonlinear mapping between the fusion images and wavefront distortions (represented by Zernike polynomials), that is, the fusion images are taken as the input data, and the corresponding Zernike coefficients as the output data. The network structure of the training in this paper has 22 layers, they are 1 input layer, 13 convolution layers, 6 pooling layers, 1 flatten layer and 1 full connection layer, that is, the output layer. The size of the convolution kernel is 3 × 3 and the step size is 1. The pooling method selects the maximum pooling and the size of the pooling kernel is 2 × 2. The activation function is ReLU, the optimization function is Adam, the loss function is the MSE, and the learning rate is 0.0001. The number of training data is 10000, which is divided into three parts: training set, validation set, and test set, accounting for 80%, 15% and 5% respectively. Trained CNN can directly output the Zernike coefficients of order 4–9 to a high precision, with these fusion images serving as the input, which is more in line with the real-time requirements. Abundant simulation experiments prove that the wavefront sensing precision is root-mean-square(RMS) 0.015λ, when the dynamic range of the wavefront is the aberration of low spatial frequency within 1.1λ of RMS value (i.e. the dynamic range of Zernike coefficients of order 4–9 is $[- 0.5\lambda \,, \, 0.5\lambda]$). In practical application, according to the system aberration characteristics, the number of network output layer units can be changed and the network structure can be adjusted based on the method presented in this paper, thereby training the new network suitable for higher order aberration to realize high-precision wavefront sensing. It is also proved that the proposed method has certain robustness against noise, and when the relative defocus error is within 7.5%, the wavefront sensor accuracy is acceptable. With the improvement of image resolution, the wavefront sensing accuracy is improved, but the number of input data of the network also increases with the sampling rate increasing, and the time cost of network training increases accordingly. Keywords:phase retrieval/ convolutional neural network/ image fusion/ sensing accuracy
500组测试数据的真实系数与网络预测系数间的标准差统计直方图如图6所示, 从图中数据可见, 系数间的标准差不大于0.025的占90%. 故利用本文方法得到的Zernike系数与真实系数极为接近. 图 6 真实系数与网络预测系数间的标准差统计直方图 Figure6. Statistical histogram of standard deviation between the real coefficient and the network prediction coefficient.

 图 1 离焦型PDPR法工作原理图
图 1 离焦型PDPR法工作原理图












 图 2 CNN结构示意图
图 2 CNN结构示意图






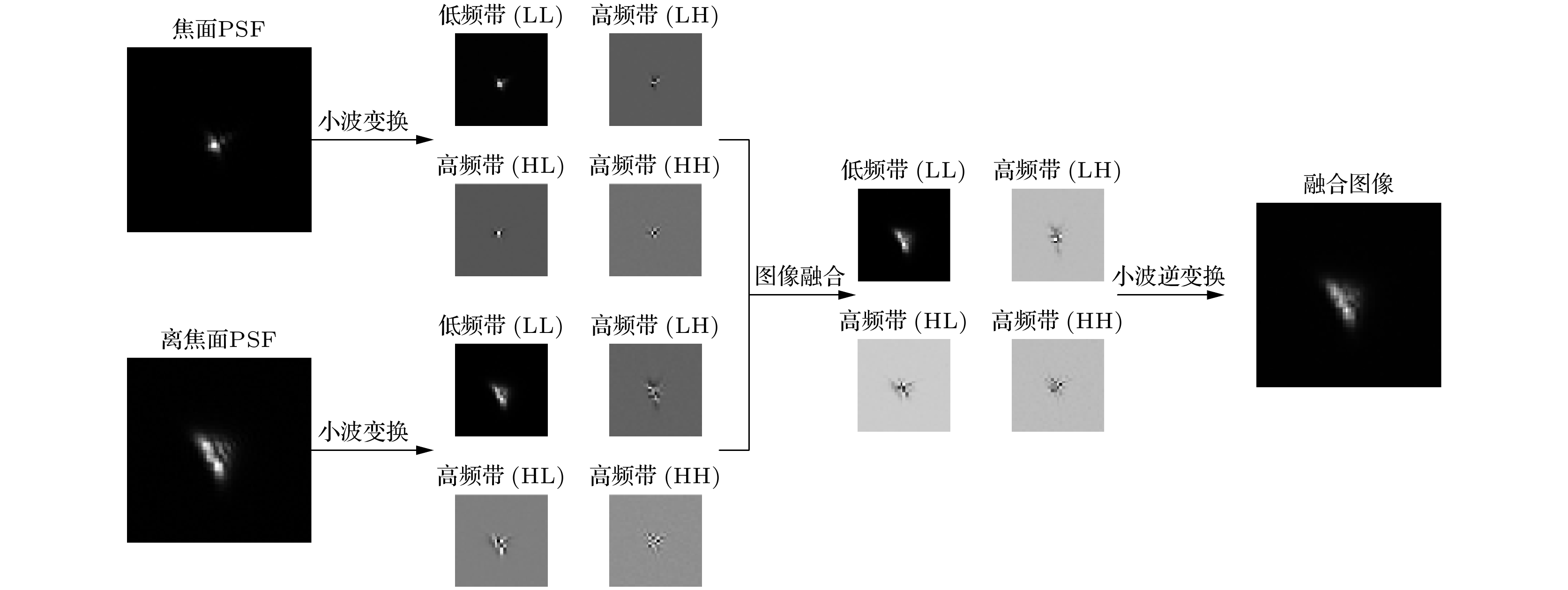 图 3 基于小波变换机理的图像融合原理
图 3 基于小波变换机理的图像融合原理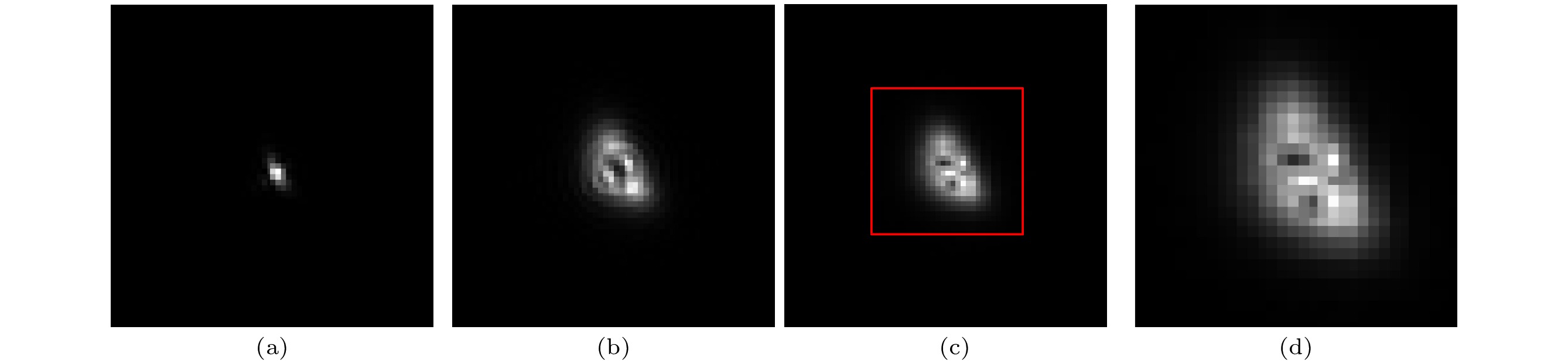 图 4 融合图像示意图 (a) 焦面PSF图像; (b) 离焦面PSF图像; (c) 融合图像; (d) CNN的输入图像(即图(c)中红框内部分)
图 4 融合图像示意图 (a) 焦面PSF图像; (b) 离焦面PSF图像; (c) 融合图像; (d) CNN的输入图像(即图(c)中红框内部分)
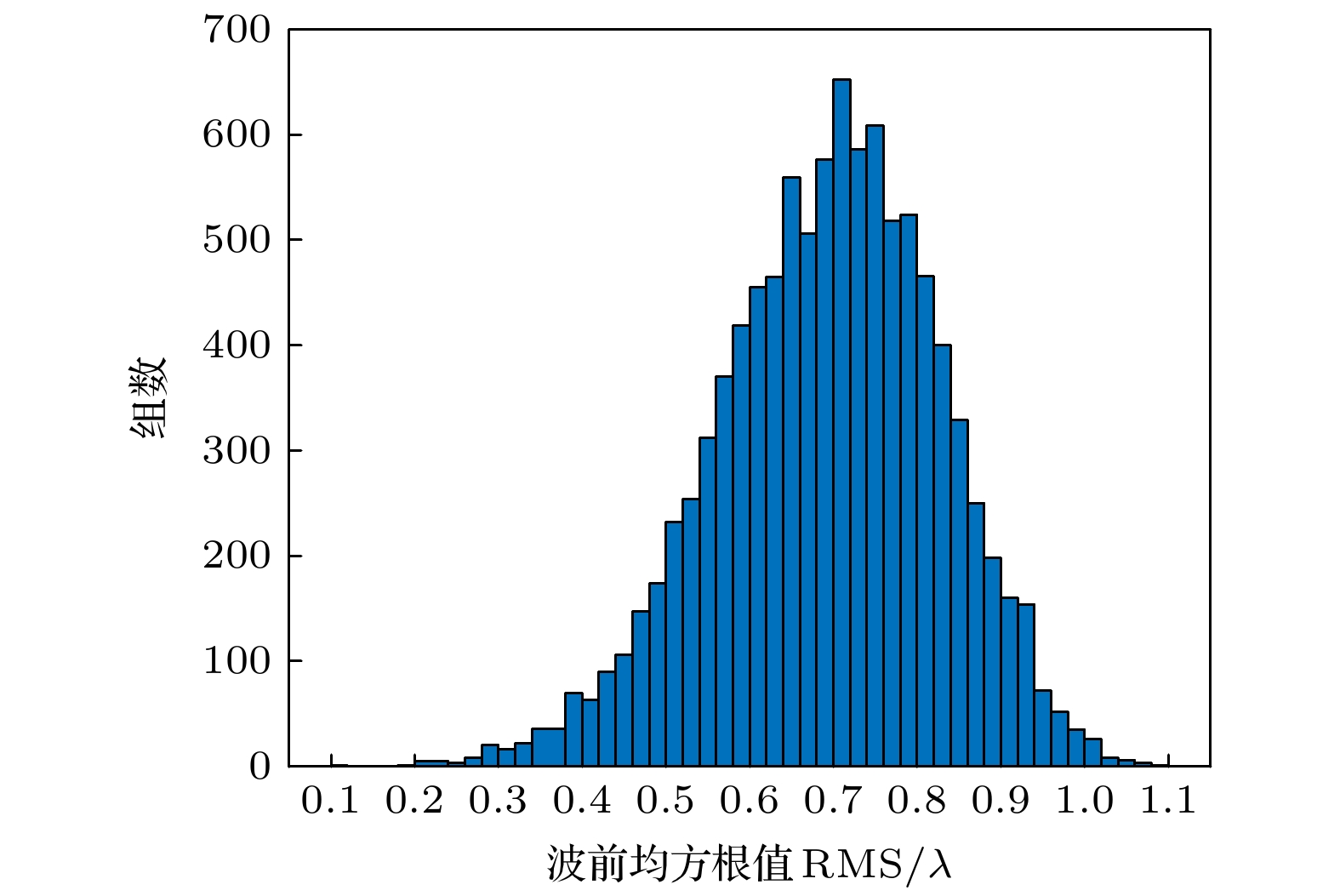 图 5 10000组随机波前RMS分布图
图 5 10000组随机波前RMS分布图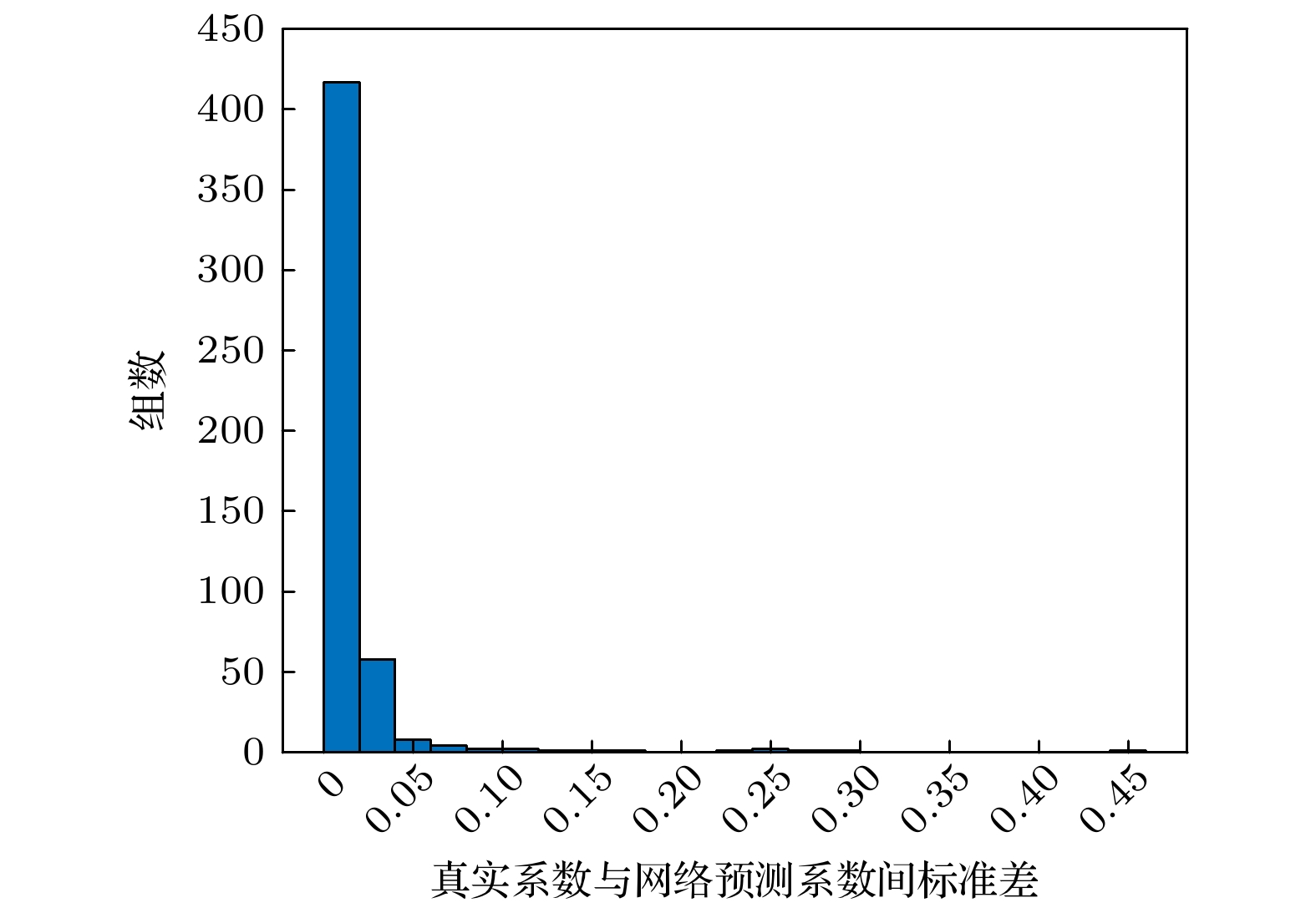 图 6 真实系数与网络预测系数间的标准差统计直方图
图 6 真实系数与网络预测系数间的标准差统计直方图


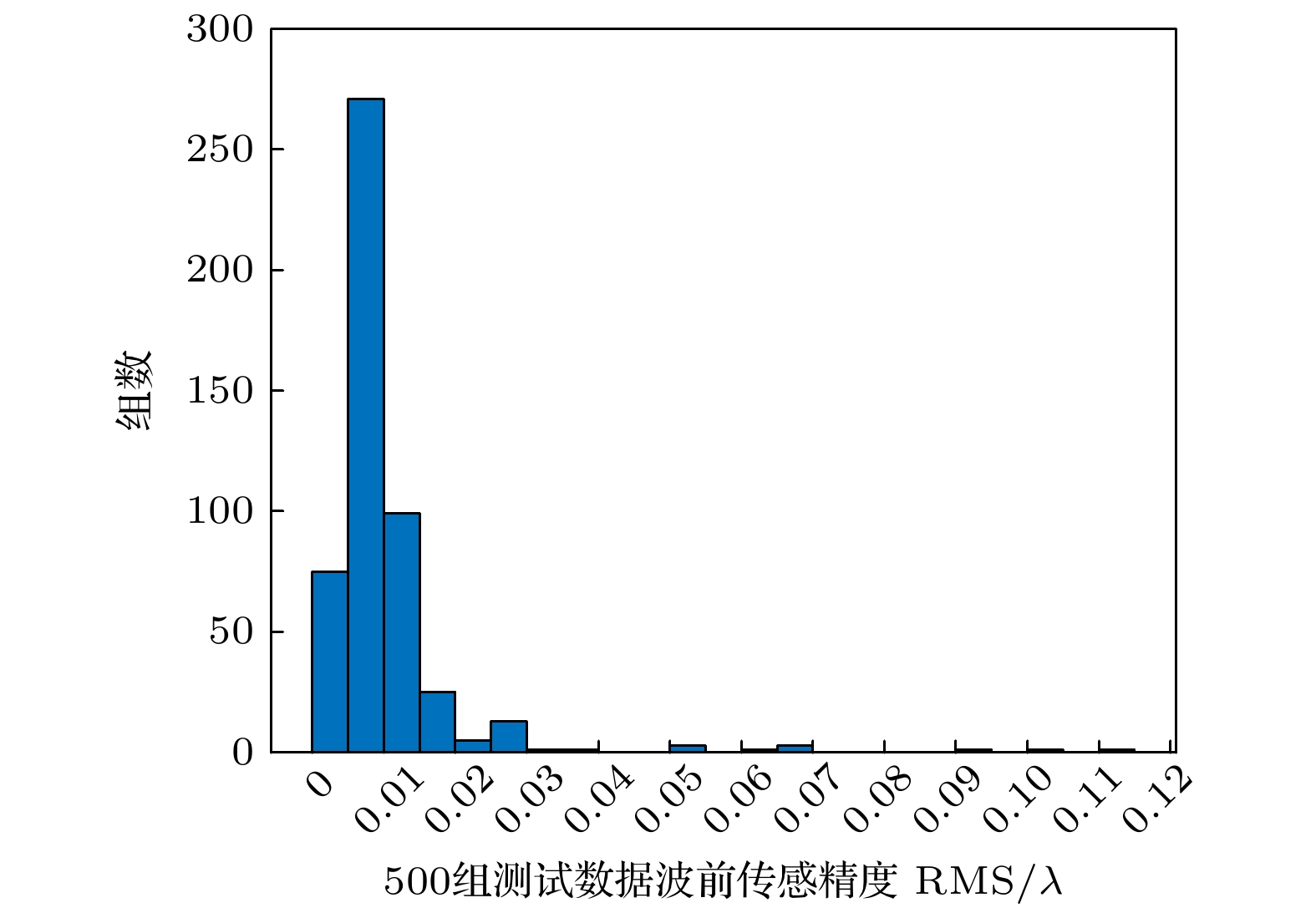 图 7 测试数据波前传感精度RMS统计直方图
图 7 测试数据波前传感精度RMS统计直方图










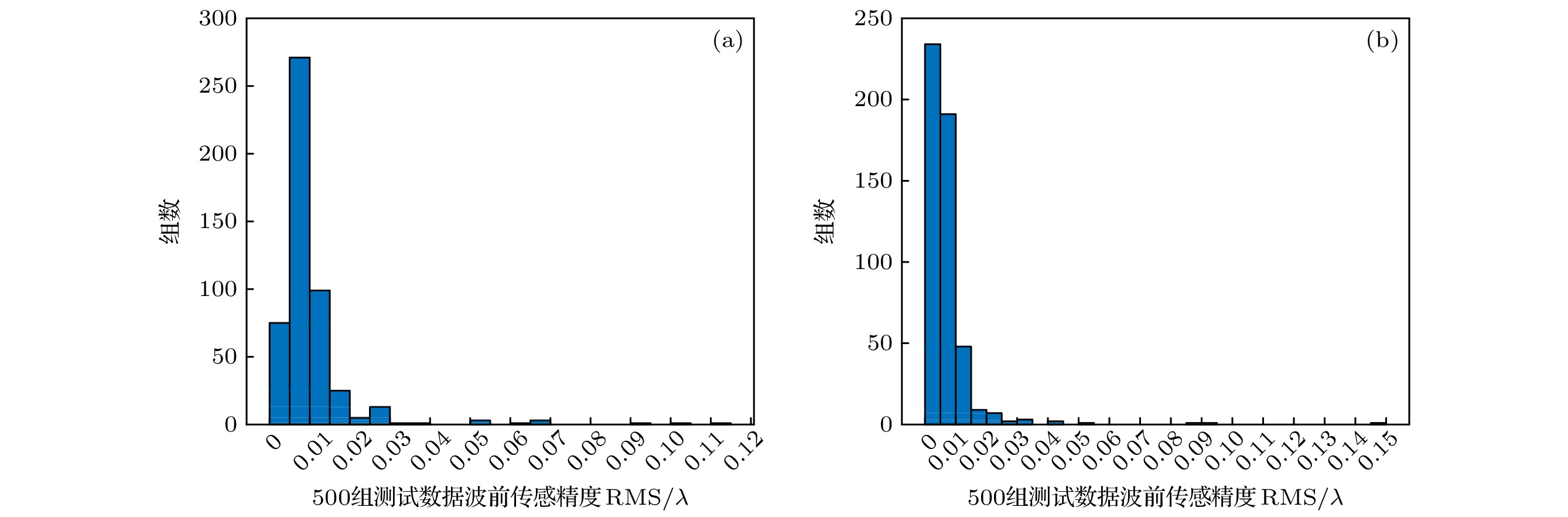 图 8 采用不同分辨率图像训练网络时, 波前传感精度RMS统计直方图对比 (a) 图像采样率 64 × 64; (b) 图像采样率128 × 128
图 8 采用不同分辨率图像训练网络时, 波前传感精度RMS统计直方图对比 (a) 图像采样率 64 × 64; (b) 图像采样率128 × 128