1.Xi’an Key Laboratory of Computational Imaging, Xidian University, Xi’an 710071, China 2.School of Physics and Optoelectronic Engineering, Xidian University, Xi’an 710071, China 3.Interdisciplinary Research Center on Advanced Optics and Perception, Xidian University, Xi’an 710071, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant No. 61705175), the China Postdoctoral Science Foundation (Grant No. 2017M613063), and the Fundamental Research Funds for the Central Universities (Grant Nos. XJS190502, XJS200505)
Received Date:04 July 2020
Accepted Date:24 July 2020
Available Online:30 November 2020
Published Online:05 December 2020
Abstract:The reflection light field of surface of the Non-Lambertian body in nature has both specular reflection and diffuse reflection components. In the process of three-dimensional(3D) reconstruction, image matching and pattern recognition are based on the ideal Lambert body. The imaging effect is limited due to the presence of specular reflection components, and the accuracy of feature recognition is low. In order to obtain the diffuse reflection component accurately, a large number of studies have been conducted for a long time, which can be mainly divided into two parts: intensity- and polarization-based separation techniques. The intensity-based separation algorithm is limited in many aspects due to the prior knowledge, such as light source chromaticity, direction and image color information. With the maturity of detection technology, the acquisition and interpretation of multi-dimensional physical properties of light-field have made great progress of the utilization of polarization characteristics of light wave. Compared with traditional intensity imaging technology, the polarization imaging technology has strongr and many advantages in highlighting targets. However, in traditional polarization-based separation techniques, it is often necessary to assume that the diffuse light is completely unpolarized, which is used in some specific cases but not universally.In this work, we report a method to obtain the diffuse reflection components of the target surface based on the polarization characteristics of the light-field. According to Fresnel's law and Lawrence B. Wolff's reflection model, the reflected light-field on the target surface can be divided into diffuse and specular components with partial polarization. The partial polarization characteristics of diffuse and specular components are explored in depth and the Stokes vector is used to calculate the minimum light intensity of each pixel modulated by polarizer, which is completely unpolarized light. By subtracting completely unpolarized light from the obtained polarized sub-images, the diffuse and specular components in the polarized part satisfy the linear constraint model. Based on the independent component analysis (ICA) model, the diffuse and specular components in the polarized part are regarded as independent and non-interfering additive vectors. The singular value decomposition method and optical relevancy of mutual information are used to determine the optimal mix coefficients matrix of the subcomponents in the linear constrained model. Thus, the diffuse components are accurately acquired and explained from the complex reflected light-field. Simulation and experimental results show that the algorithm mentioned above can accurately obtain the optimal mix coefficients’ matrix without the prior knowledge of illuminant chromaticity, or direction or image chromatic information, or others. This technique can accurately obtain and remove the specular reflection part, at the same time, restore the diffuse light intensity which is covered by the specular reflection and conforms to the change trend of the surface shape. Meanwhile, the pretty good results also demonstrate that the proposed separation method has the strong stability and wide applicability. This technology does not have to make the assumption that 3D imaging technology and computer vision algorithms such as pattern recognition rely on natural objects as ideal Lambert bodies, and it can eleminate the influence of complex reflected light-field on target results, which makes passive remote 3D imaging technology more applicable and more robust. Keywords:reflected light-field/ polarization characteristics/ diffuse reflection separation
在算法分离过程中得到的所有互信息值如图4所示, 其中图4(a), (b)分别是互信息在最小处$\beta = 0.545$ rad时所得到的漫反射分量与镜面反射分量的分离结果. 图4中随着$\beta $增大到2.4位置开始, 互信息值出现明显剧烈的起伏运动, 首先是由于该图的处理对象是仿真的镜面反射与漫反射分量随意组合的结果, 其两者之间较低的相关性导致纵坐标范围在0—0.17之间, 会进一步突显抖动的剧烈程度. 其次, 在计算互信息$({\rm MI})(I_{\rm{Diffuse}}^{\rm{p}}, I_{\rm{Specular}}^{\rm{p}})$时, 由(7)式可知, 需要统计$I_{\rm{Diffuse}}^{\rm{p}}$和$I_{\rm{Specular}}^{\rm{p}}$图像中所占每一灰度级像素的个数, 随着$\beta \in [0, \pi ]$的改变, 将会得到具有不同程度相关的两幅图像, 若其中一副图像部分区域的像素值在原来的基础上减小1, 也会导致在统计灰度级的个数时, 数目发生明显迁移, 从而导致位于该灰度级像素的概率发生变化, 进而导致分布函数突变. 该现象在任意一段由$\beta $改变所导致图像灰度级所占像素个数发生明显迁移的过程中都可能存在, 仅仅与$\beta $改变时其每次增加的间隔大小有关系, 但是随着分离过程的进行, 所获得的子分量图像会逐渐接近最独立的状态, 互信息度的值总会呈现减小趋势, 从而达到最优的分离结果, 所以对$\beta $最小值的选取是没有影响的. 这里为了更加准确, 详尽的反映出$\beta $改变时对分离结果的影响, 设定$\beta $每次增加量只为0.001去计算混合系数矩阵得到最终分离结果如图4所示. 为了验证算法的鲁棒性与稳定性, 保持分量混合系数矩阵第一列数值不变, 通过改变第二列中的四个系数进行精度分析, 结果如图5所示. 曲线上的圆圈表示镜面反射分量混合系数所对应的设定值, 菱形表示通过算法获取到的镜面反射分量的系数值. 不同颜色的曲线变化是相对独立的, 代表4个不同分量混合系数之间没有关联性. 同一颜色下每一组测试所对应的两个点的距离反映了处理效果的鲁棒性. 带有蓝色五角星的曲线表示每一组镜面反射分量设定值组成的向量与算法计算得到的系数组成向量之间的欧氏距离, 其值越小表示算法计算的数值越接近设定值. 对比其他几组数据来说, 第1组和第7, 10组的误差较大, 分析其原因主要是紫色线所对应的系数3误差大导致的. 这是由于在计算时该系数在混合系数矩阵中所对应的漫反射分量系数值为0, 该部分漫反射分量不受约束, 而在利用基于ICA架构的分离算法去求解时, 由于算法不能无限逼近0值, 漫反射分量无法实现绝对消除, 从而导致系数3相对于其他三个系数来说误差大, 但是总体而言其误差不会超过0.1, 这意味着对最终分离结果影响不大. 图 5 10组仿真测试数据图 Coef1, Coef2, Coef3和Coef4是镜面反射分量混合系数的4个设定值; Coef1-Ours, Coef2-Ours, Coef3-Ours和Coef4-Ours是算法得到的混合系数值; Eu-Dis表示每组设定值组成的向量跟算法计算值组成的向量之间的欧氏距离 Figure5. Plots of ten sets of simulation test data: Coef1, Coef2, Coef3 and Coef4 are four set values of the coefficients of the specular reflection components; Coef1-Ours, Coef2-Ours, Coef3-Ours and Coef4-Ours are the coefficients obtained by our algorithm; Eu-Dis represents the Euclidean distance between the vector composed of set values and the vector composed of the calculated values of our algorithm in each group.
考虑到生活中目标的多样性以及光场环境的复杂性, 利用Thorlab LPVISC100-MP2线偏振片配合EOS77 D佳能相机对一个非理想朗伯体陶瓷物体采集偏振子图像, 利用基于光场偏振特性的目标表面漫反射成分获取算法对真实场景下的目标进行镜面反射与漫反射分量分离, 结果如图6所示. 图 6 陶瓷目标表面反射光强分布及分离结果 (a), (b)和(c)分别为图(d), (e)和(f)沿图示红虚线处的光强梯度分布; (d)是偏振片在0°方向下获取的目标原始光强图片; (e)和(f)分别是算法处理后最优的漫反射和镜面反射光强分布; (g)是算法处理过程中得到的互信息图; (h)是(d), (e), (f)沿图示蓝实线位置的光强截面结果 Figure6. Intensity distribution and separation results on the surface of ceramic object: (a), (b) and (c) are the light intensity gradient distribution along the red dotted line shown in Fig. (d), (e) and (f), respectively; (d) is the original light intensity of the target obtained from the polarizer at the direction of 0°; (e) and (f) are the optimal light intensity distributions of diffuse and specular component after our algorithm, respectively; (g) is the mutual information plot obtained during algorithm processing; (h) is the results of light intensity cross section obtained along the blue solid line in Fig. (d), (e) and (f).
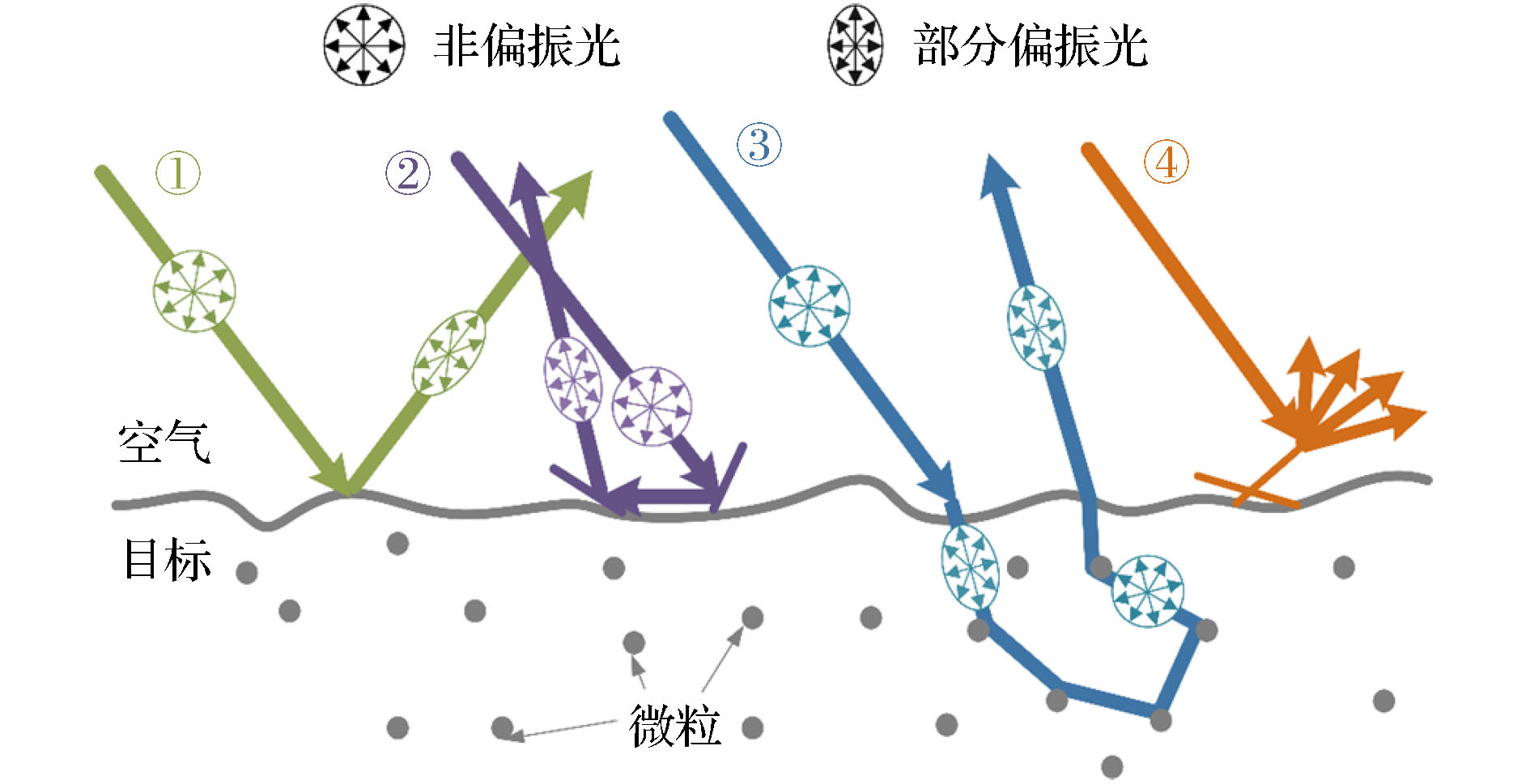 图 1 物体表面反射光分类
图 1 物体表面反射光分类






















































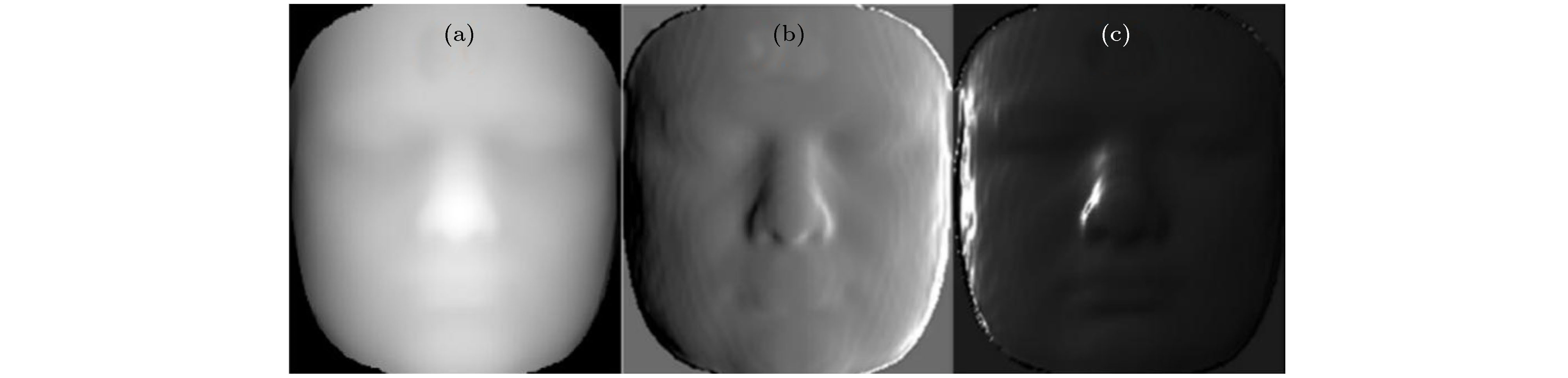 图 2 (a) 仿真人脸深度信息; (b), (c) 通过渲染后的漫反射和镜面反射仿真图像
图 2 (a) 仿真人脸深度信息; (b), (c) 通过渲染后的漫反射和镜面反射仿真图像

 图 3 基于二色反射模型的四幅模拟图像 (a), (b), (c), (d)分别代表(8)式混合后的光强分布
图 3 基于二色反射模型的四幅模拟图像 (a), (b), (c), (d)分别代表(8)式混合后的光强分布









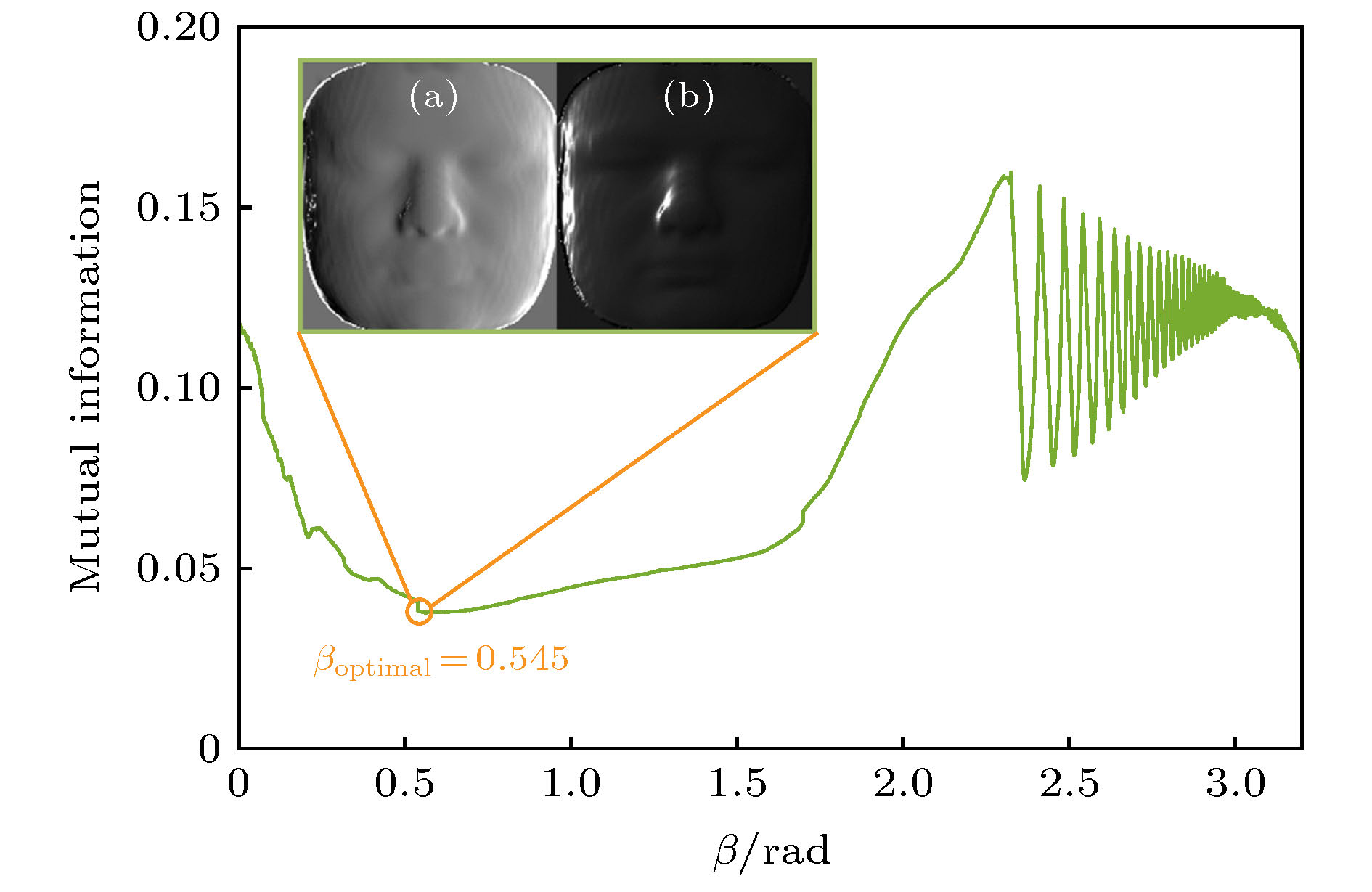 图 4 互信息随β变化情况及镜面反射和漫反射最终分离结果 (a) 分离的最优漫反射; (b) 分离的最优镜面反射
图 4 互信息随β变化情况及镜面反射和漫反射最终分离结果 (a) 分离的最优漫反射; (b) 分离的最优镜面反射










 图 5 10组仿真测试数据图 Coef1, Coef2, Coef3和Coef4是镜面反射分量混合系数的4个设定值; Coef1-Ours, Coef2-Ours, Coef3-Ours和Coef4-Ours是算法得到的混合系数值; Eu-Dis表示每组设定值组成的向量跟算法计算值组成的向量之间的欧氏距离
图 5 10组仿真测试数据图 Coef1, Coef2, Coef3和Coef4是镜面反射分量混合系数的4个设定值; Coef1-Ours, Coef2-Ours, Coef3-Ours和Coef4-Ours是算法得到的混合系数值; Eu-Dis表示每组设定值组成的向量跟算法计算值组成的向量之间的欧氏距离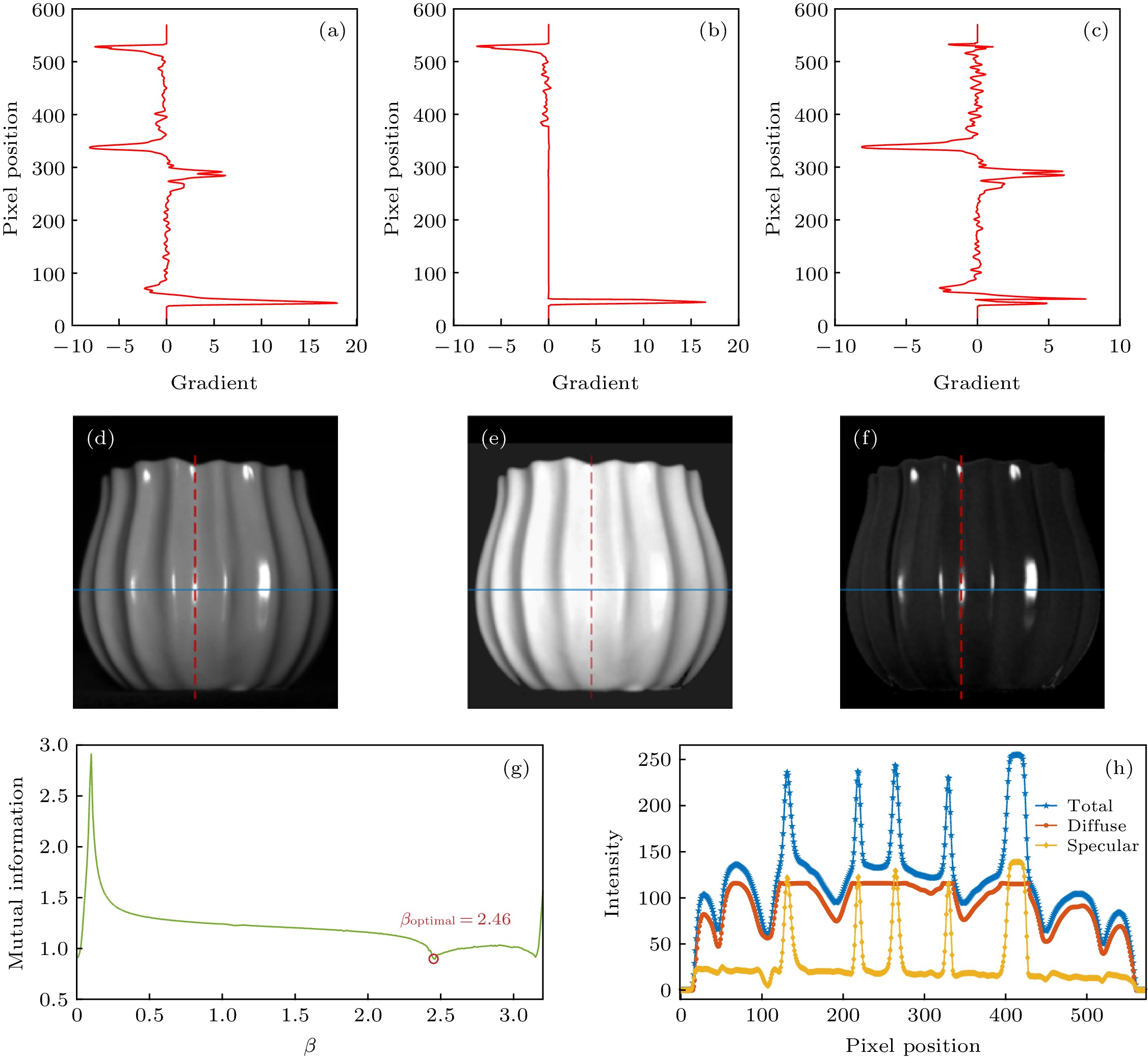 图 6 陶瓷目标表面反射光强分布及分离结果 (a), (b)和(c)分别为图(d), (e)和(f)沿图示红虚线处的光强梯度分布; (d)是偏振片在0°方向下获取的目标原始光强图片; (e)和(f)分别是算法处理后最优的漫反射和镜面反射光强分布; (g)是算法处理过程中得到的互信息图; (h)是(d), (e), (f)沿图示蓝实线位置的光强截面结果
图 6 陶瓷目标表面反射光强分布及分离结果 (a), (b)和(c)分别为图(d), (e)和(f)沿图示红虚线处的光强梯度分布; (d)是偏振片在0°方向下获取的目标原始光强图片; (e)和(f)分别是算法处理后最优的漫反射和镜面反射光强分布; (g)是算法处理过程中得到的互信息图; (h)是(d), (e), (f)沿图示蓝实线位置的光强截面结果
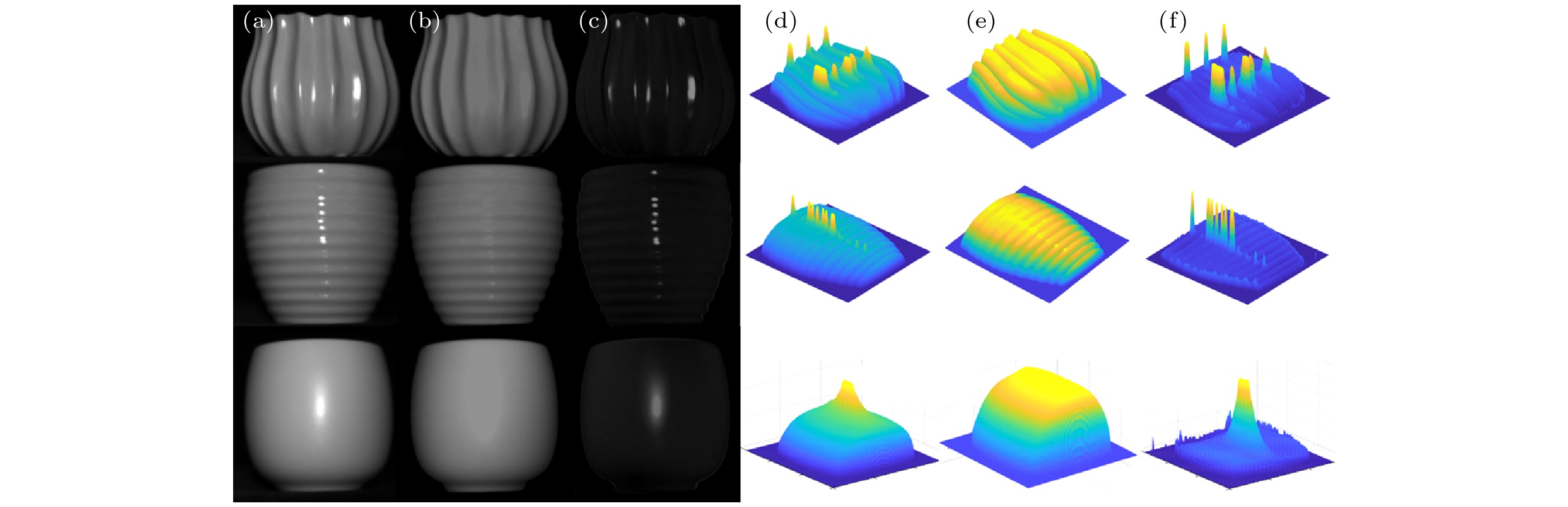 图 7 其他目标反射成分分离结果 (a) 总光强分布; (b), (c) 分离后的漫反射分量和镜面反射分量光强分布; (d), (e), (f) 分别为(a), (b), (c)的光强空间显示结果
图 7 其他目标反射成分分离结果 (a) 总光强分布; (b), (c) 分离后的漫反射分量和镜面反射分量光强分布; (d), (e), (f) 分别为(a), (b), (c)的光强空间显示结果