1.National Time Service Center, Chinese Academy of Sciences, Xi’an 710600, China 2.Key Laboratory of Time and Frequency Primary Standards, Chinese Academy of Sciences, Xi’an 710600, China 3.School of Astronomy and Space Science, University of Chinese Academy of Sciences, Beijing 100049, China
Abstract:Kalman filter time scale algorithm is a method of real-time estimating atomic clock state. It is of great practical value in the time-keeping work. Reliable Kalman filter time scale algorithm requires a reliable atomic clock state model, a random model and a reasonable estimation method. However, it is difficult to construct accurate state model when the noises of atomic clock change. The random model is generally based on the prior statistical information about atomic clock noises, and the prior statistical information may be distorted. In the process of time scale calculation, the noises of atomic clocks need estimating in the Kalman filter time scale algorithm, which is quantified according to the intensity of the noise. With the change of the external environment or aging of atomic clock, the noise intensity may change, resulting in the disturbance of atomic clock state estimation in the Kalman filter time scale algorithm, which further affects the accuracy and stability of the time scale. On the other hand, the error of the noise intensity estimation of atomic clocks will also affect the performance of time scale. Therefore, it is necessary to control the disturbance caused by the variation of noise intensity or the estimation error of noise intensity. In this regard, an adaptive factor is introduced to improve the Kalman filter time scale algorithm, and another adaptive factor is introduced into the state prediction covariance matrix in Kalman filter time scale algorithm. And the values of the two adaptive factors are calculated in real time by using statistics to control the growth of the state prediction covariance. The disturbance of state estimation of atomic clock is reduced, and the accuracy and stability of time scale are improved. In this paper, the sampling interval of simulated data and the measured data are 300 s and 3600 s respectively. The simulated data and measured data are used to calculate the overlapping Allan deviations of the time scale. The results show that the improved Kalman filter time scale algorithm can improve the stability of the sampling time more than 14400 s compared with classical Kalman filter time scale algorithm, and affect the stability of the sampling time less than 14400 s. The degree of influence is related to the weight algorithm of atomic clock. The measured data in this paper are treated by the “predictability” weighting algorithm, which guarantees the long-term stability of time scale. So the simulated data and measured data show that compared with classical Kalman filter time scale algorithm, the improved Kalman filter clock time scale algorithm can improve the accuracy and the long-term stability of time scale. Keywords:atomic clock noises/ Kalman filter/ adaptive factor/ time scale
式中, ${x_i}\left( t \right)$, ${y_i}\left( t \right)$和${z_i}\left( t \right)$分别表示钟$i$在$t$时刻的相位偏差、频率偏差和频率漂移偏差. 第$i$台钟从时刻${t_{k - 1}}$到时刻${t_k}$的状态由下面方程描述[6]:
式中, ${\tilde x_i}({t_k})$表示${t_k}$时刻原子钟$i$的时间偏差改正值, ${\hat x_i}\left( {{t_k}} \right)$表示${t_k}$时刻原子钟$i$的时间偏差估计值. AHM1和AHM2的时间偏差改正值分别如图1和图2所示. 计算表明, 基于经典Kalman滤波时间尺度算法, AHM1与AHM2的时间偏差改正值分别约有4 ns和3 ns的扰动, 而基于改进Kalman滤波时间尺度算法得到的时间偏差改正值不存在扰动现象, 说明基于经典Kalman滤波时间尺度算法得到的原子钟状态估计受原子钟噪声强度变化的影响, 而改进Kalman滤波时间尺度算法有效抵制了原子钟噪声强度变化对状态估计的影响, 提高了状态估计的准确度. 基于原子钟时间偏差改正值计算时间尺度, 计算公式为 图 1 基于两种算法模拟的AHM1时间偏差改正值 (a) 基于Kalman滤波算法模拟的AHM1的时间偏差改正值; (b) 基于改进Kalman滤波算法模拟的AHM1时间偏差改正值 Figure1. The corrected time deviations of modeling AHM1 based on two algorithms: (a) The corrected time deviations of modelling AHM1 based on Kalman filter algorithm; (b) the corrected time deviations of modelling AHM1 based on modified Kalman filter algorithm.
图 2 基于两种算法的模拟AHM2的时间偏差改正值 (a) 基于Kalman滤波算法模拟的AHM2的时间偏差改正值; (b) 基于改进Kalman滤波算法模拟的AHM2的时间偏差改正值 Figure2. The corrected time deviations of modelling AHM2 based on two algorithms: (a) The corrected time deviations of modelling AHM2 based on Kalman filter algorithm; (b) the corrected time deviations of modelling AHM2 based on modified Kalman filter algorithm.




















































































































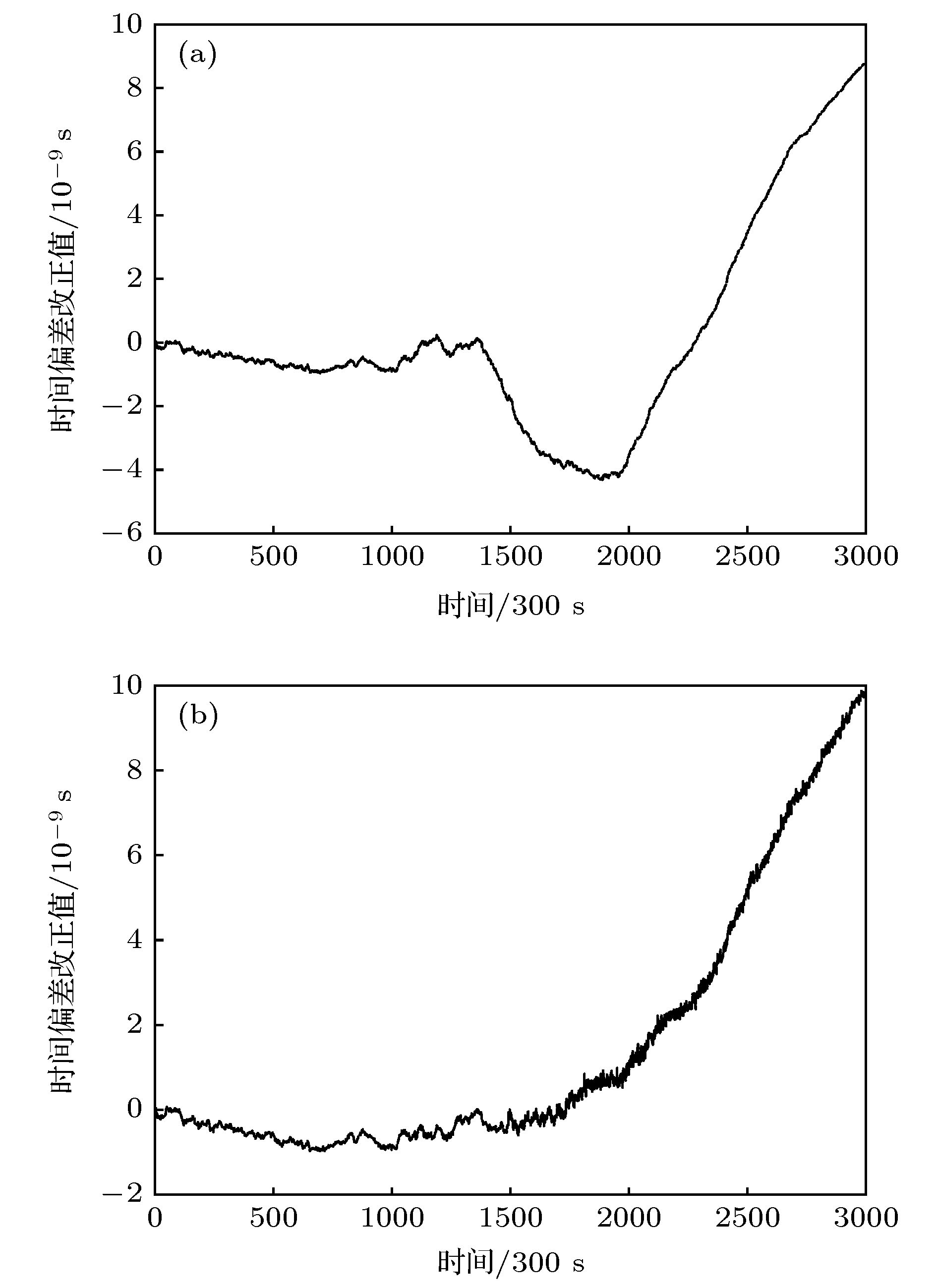 图 1 基于两种算法模拟的AHM1时间偏差改正值 (a) 基于Kalman滤波算法模拟的AHM1的时间偏差改正值; (b) 基于改进Kalman滤波算法模拟的AHM1时间偏差改正值
图 1 基于两种算法模拟的AHM1时间偏差改正值 (a) 基于Kalman滤波算法模拟的AHM1的时间偏差改正值; (b) 基于改进Kalman滤波算法模拟的AHM1时间偏差改正值 图 2 基于两种算法的模拟AHM2的时间偏差改正值 (a) 基于Kalman滤波算法模拟的AHM2的时间偏差改正值; (b) 基于改进Kalman滤波算法模拟的AHM2的时间偏差改正值
图 2 基于两种算法的模拟AHM2的时间偏差改正值 (a) 基于Kalman滤波算法模拟的AHM2的时间偏差改正值; (b) 基于改进Kalman滤波算法模拟的AHM2的时间偏差改正值
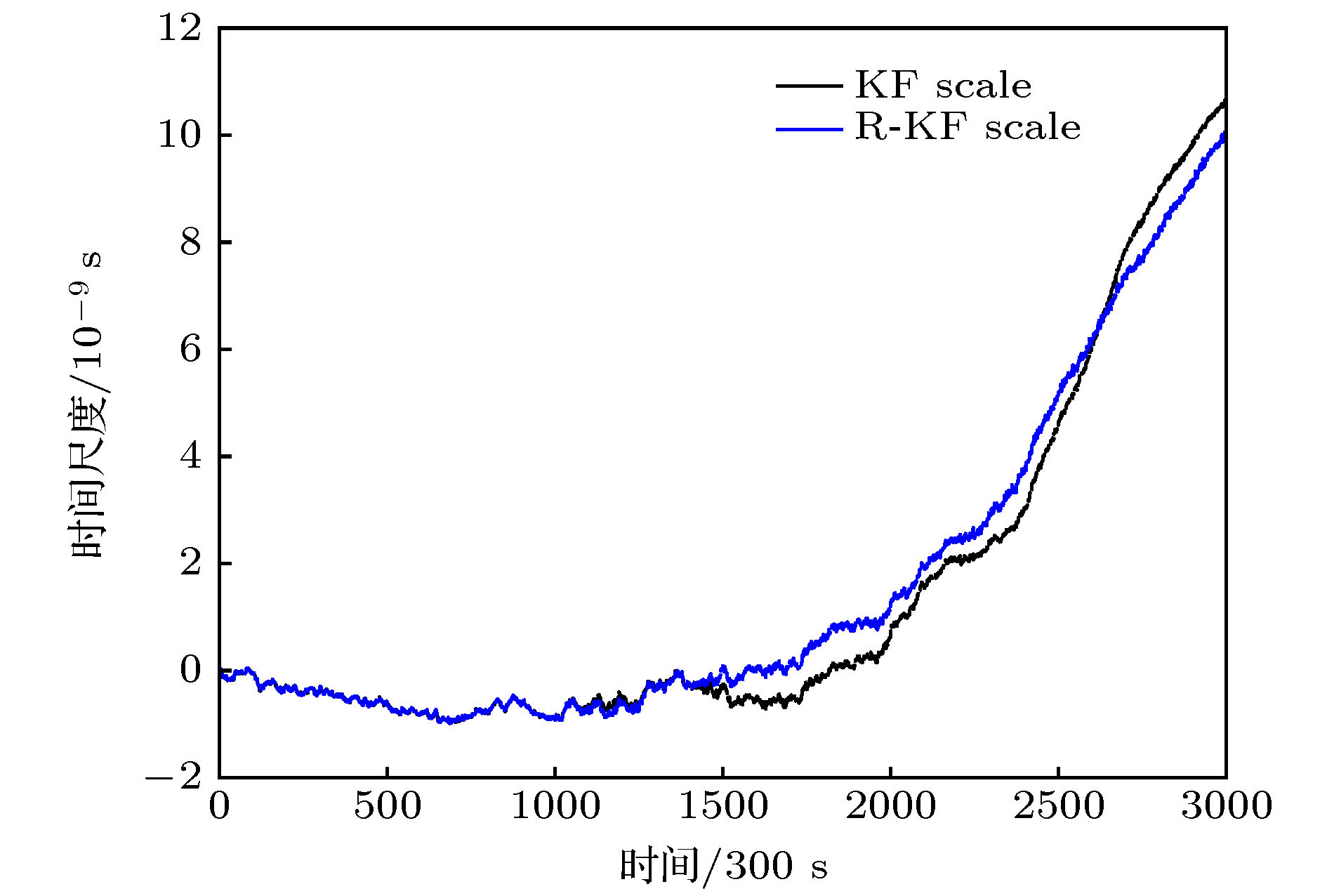 图 3 基于两种Kalman滤波算法的时间尺度
图 3 基于两种Kalman滤波算法的时间尺度 图 4 基于两种Kalman滤波算法的时间尺度的重叠Allan偏差
图 4 基于两种Kalman滤波算法的时间尺度的重叠Allan偏差














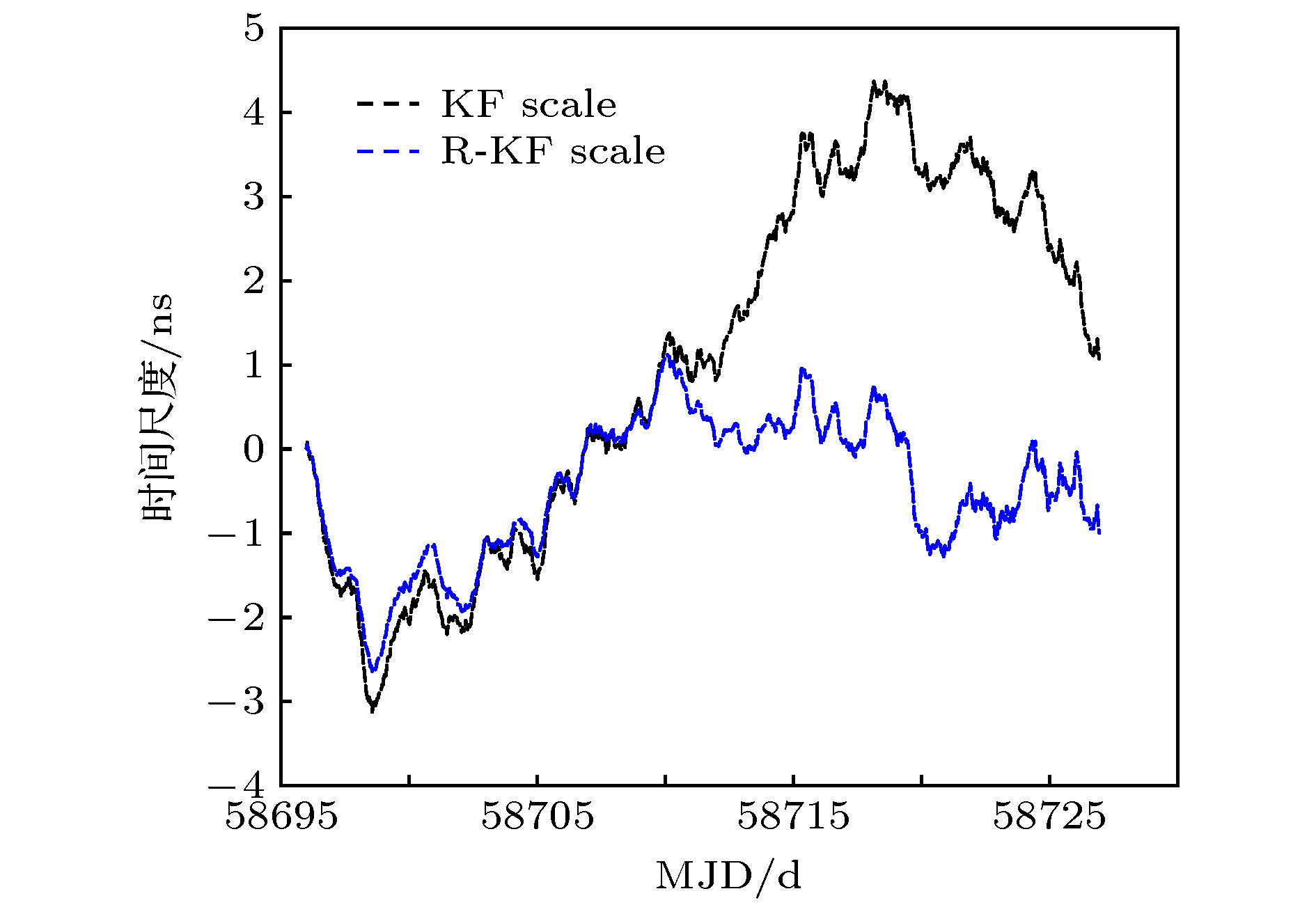 图 5 基于两种Kalman滤波算法的时间尺度
图 5 基于两种Kalman滤波算法的时间尺度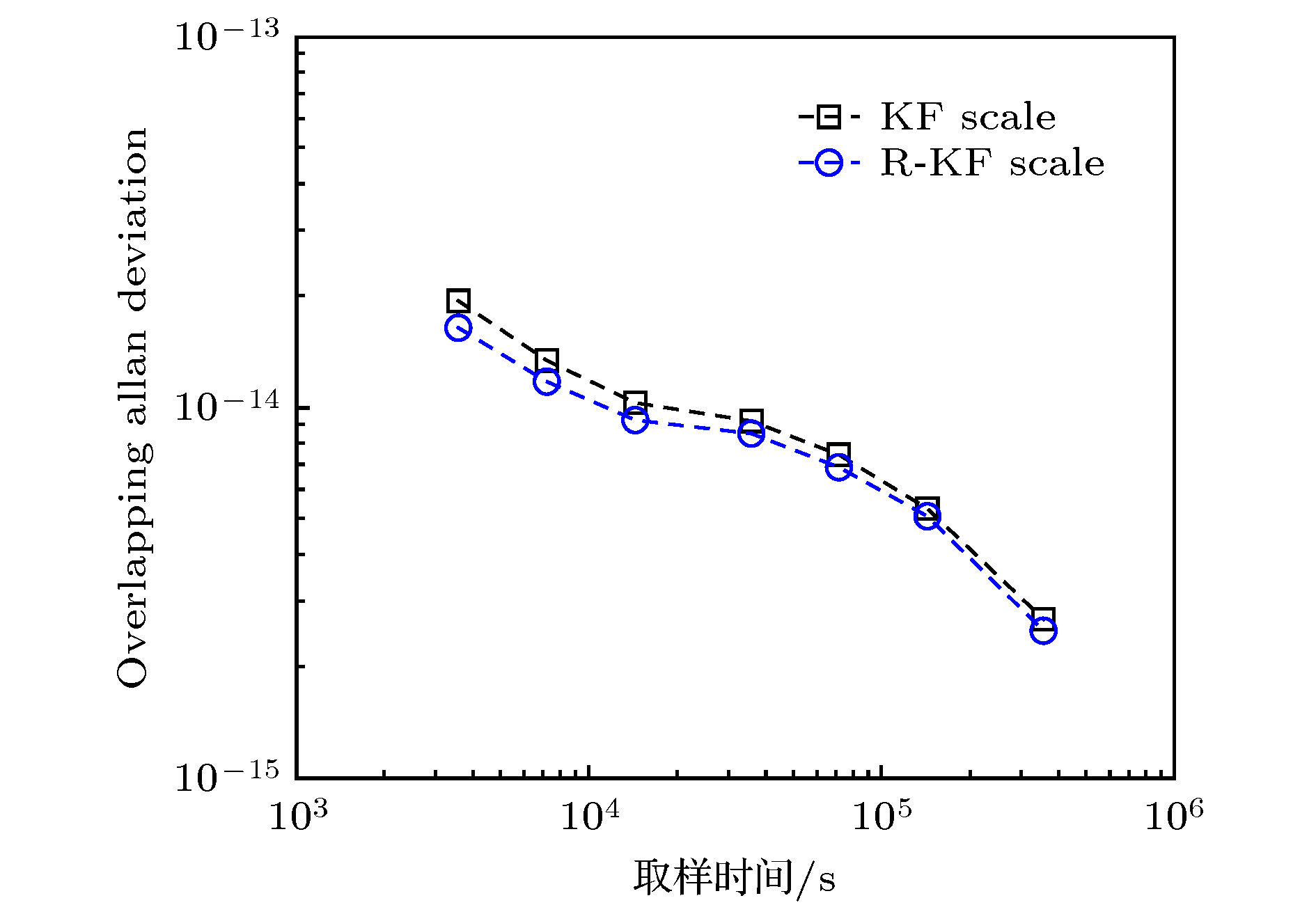 图 6 基于两种Kalman滤波算法的时间尺度的稳定度
图 6 基于两种Kalman滤波算法的时间尺度的稳定度