1.Key Laboratory on Adaptive Optics, Chinese Academy of Sciences, Chengdu 610209, China 2.Institute of Optics and Electronics, Chinese Academy of Sciences, Chengdu 610209, China 3.Institute of Software, Chinese Academy of Sciences, Beijing 100190, China 4.University of Chinese Academy of Sciences, Beijing 100049, China
Abstract:In the field of astronomical high resolution imaging, adaptive optical correction and image restoration are necessary, and these two techniques can be used either separately or jointly to improve the quality of observed images. However, for a long time, adaptive optics and image restoration technology have been developing independently because they belong to different research fields, and even though they are combined together, it is just a simple splicing of the two technologies, with no crossover between the two. Such a control method results in adaptive optical correction producing only the best possible intermediate result—optical imaging, but is out of control for the final result—restored image. Therefore, it is of great significance to study a control method that combines the two methods in order to obtain the high-quality restored image. In this paper, the traditional hybrid method (adaptive optics + image post-deconvolution) is analyzed and its defects are expounded. The idea of combining adaptive optics and image restoration for system analysis is proposed for the first time, and the concept of correction degree of deformable mirror (the scaling ratio of control voltage of deformable mirror to that of traditional control voltage) is proposed. By changing the degree of correction, the correction residual of the deformation mirror and the detection error of the wavefront sensor can be adjusted. It is proved that there exists an optimal value of the quality of the reconstructed image in the direction of reducing correction degree, and a new control method is obtained by using the optimal correction degree to correct the control voltage of the deformation mirror. For the application in point target imaging, the simulations are carried out with 37-element and 61-element deformable mirrors under several typical wavefront aberrations, and the results show that this method can obtain a better restoration image than traditional methods. This method has more potential applications in adaptive optical systems with large fitting residuals. The idea that adaptive optics and image restoration are considered as a whole, has not been reported in the literature before, so the work of this paper provides a new way of thinking for the research in related fields. Keywords:adaptive optics/ image restoration technique/ optimal control method
波前重构精度和校正残差RMS随校正度β的变化趋势如图4所示, 结果也与前文结论一致. 对其他类型像差进行这两项仿真均有类似结果. 图 4 波前重构精度和波前残差均方差随校正度β的变化趋势 Figure4. Curves of wave-front reconstruction accuracy and RMS of wave-front residual error changing with β.
对选择的6种像差, 图5给出了在均值为0方差(var)为(10–4)2的高斯白噪声下, 校正度β从1变化到0时对应的各复原图像SR曲线. 图 5 61单元变形镜不同校正度下复原图像的SR Figure5.SR of restored images with different β by 61-element DM.
显然, 各SR的最大值均不在传统AO控制方法所对应的β = 1处. 本文重点和传统方法作比较, 为了显示更加清晰, 以在β = 1处的数据为标准, 将其他校正度下的数据与标准数据的比值定义为相对SR, 该值比越大效果越好, 反之效果越差. 在三种噪声强度下重复仿真, 分别代表了轻度、中度、重度噪声污染, 结果如图6所示. 图 6 61单元变形镜不同噪声强度下复原图像的相对SR (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2 Figure6. Relative SR of restored images with different noise by 61-element DM: (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2.
可见, 在三种强度噪声下, 各像差对应的结果都存在相似的规律, 即随着β的降低, 先出现全局最大值, 然后总体趋势趋于下降, 这体现了上节中分析的校正度在波前重构精度和波前残差RMS下的权衡关系, 证明了最优校正度的存在. 为进一步验证以上结果, 用37单元变形镜模型做了相同的仿真, 37单元变形镜相对于61单元变形镜, 少了最外层一圈驱动器, 拟合能力降低. 图7是37单元变形镜在不同噪声强度下复原图像的相对SR, 结果显示具有同样的规律. 图 7 37单元变形镜不同噪声强度下复原图像的相对SR (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2 Figure7. Relative SR of restored images with different noise by 37-element DM: (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2
























































 图 1 控制原理框图
图 1 控制原理框图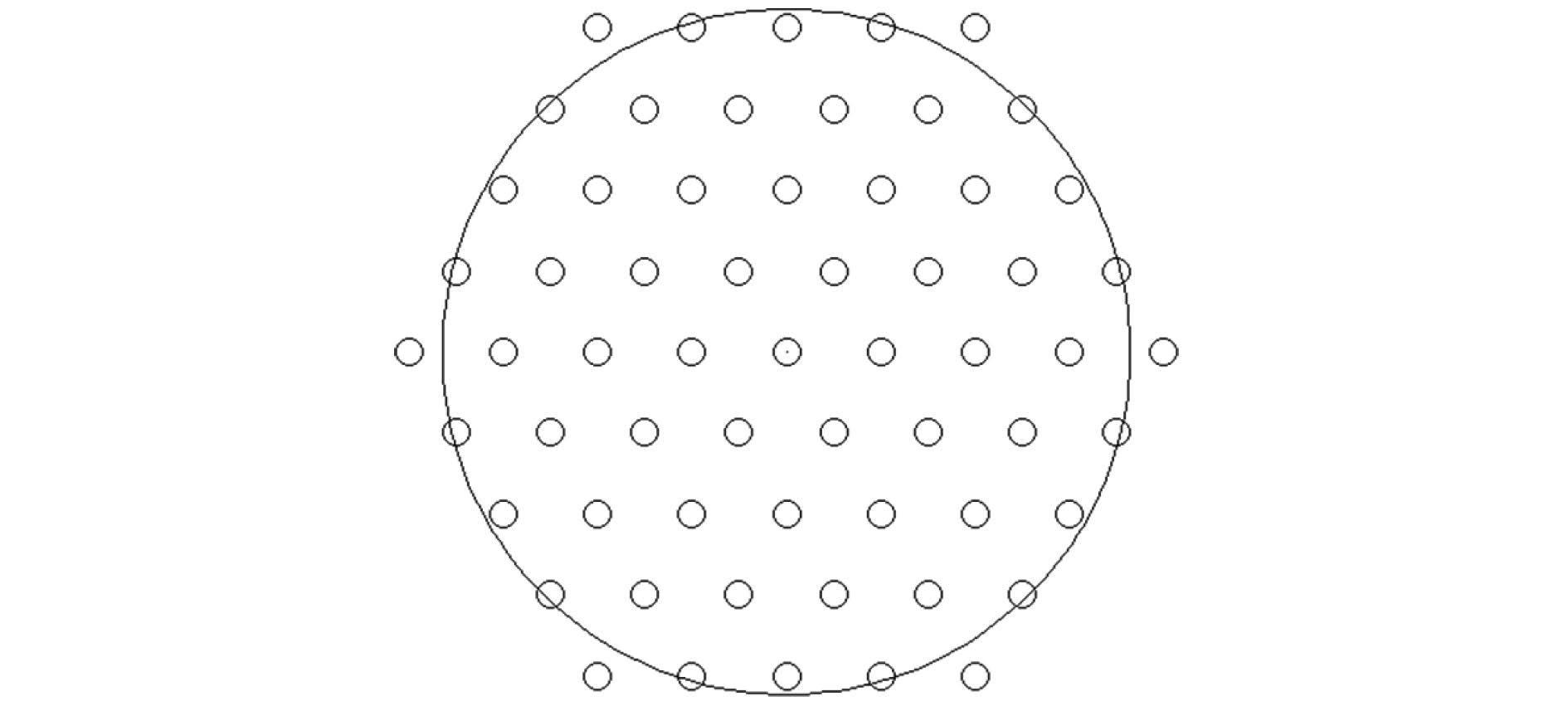 图 2 61单元变形镜驱动器布局
图 2 61单元变形镜驱动器布局
 图 3 61单元变形镜对离焦像差校正结果 (a)校正前系数; (b)校正后系数
图 3 61单元变形镜对离焦像差校正结果 (a)校正前系数; (b)校正后系数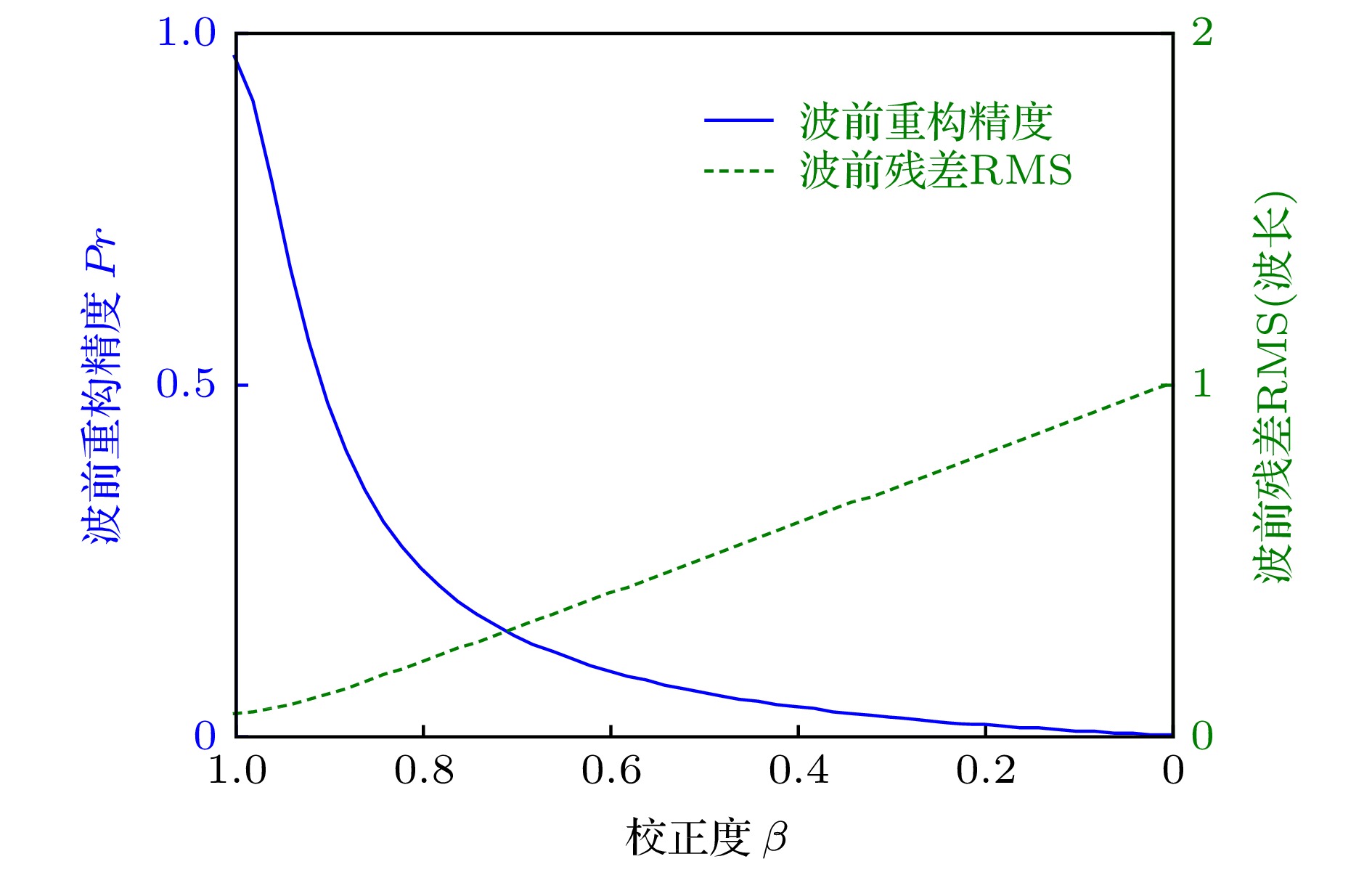 图 4 波前重构精度和波前残差均方差随校正度β的变化趋势
图 4 波前重构精度和波前残差均方差随校正度β的变化趋势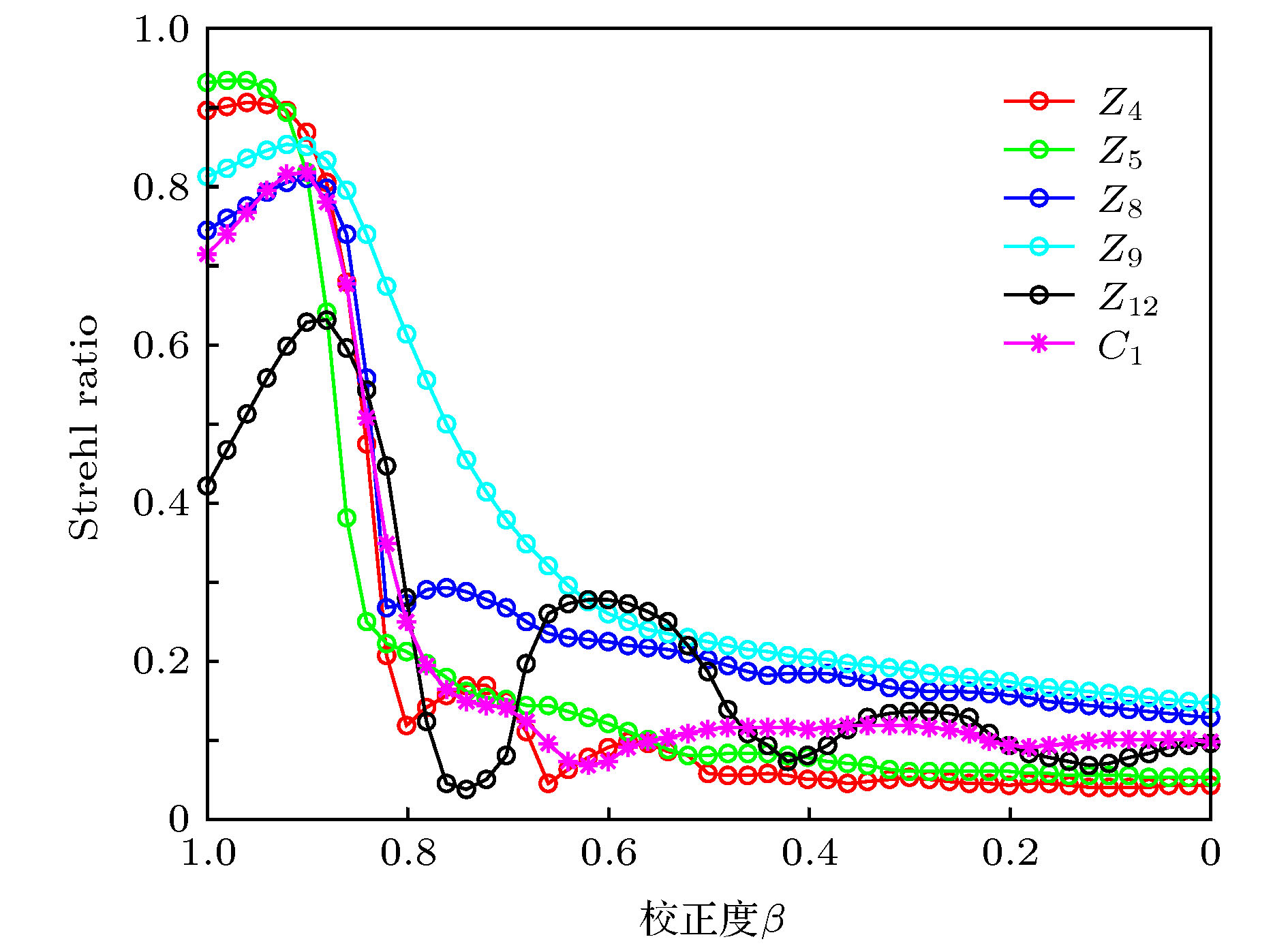 图 5 61单元变形镜不同校正度下复原图像的SR
图 5 61单元变形镜不同校正度下复原图像的SR 图 6 61单元变形镜不同噪声强度下复原图像的相对SR (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2
图 6 61单元变形镜不同噪声强度下复原图像的相对SR (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2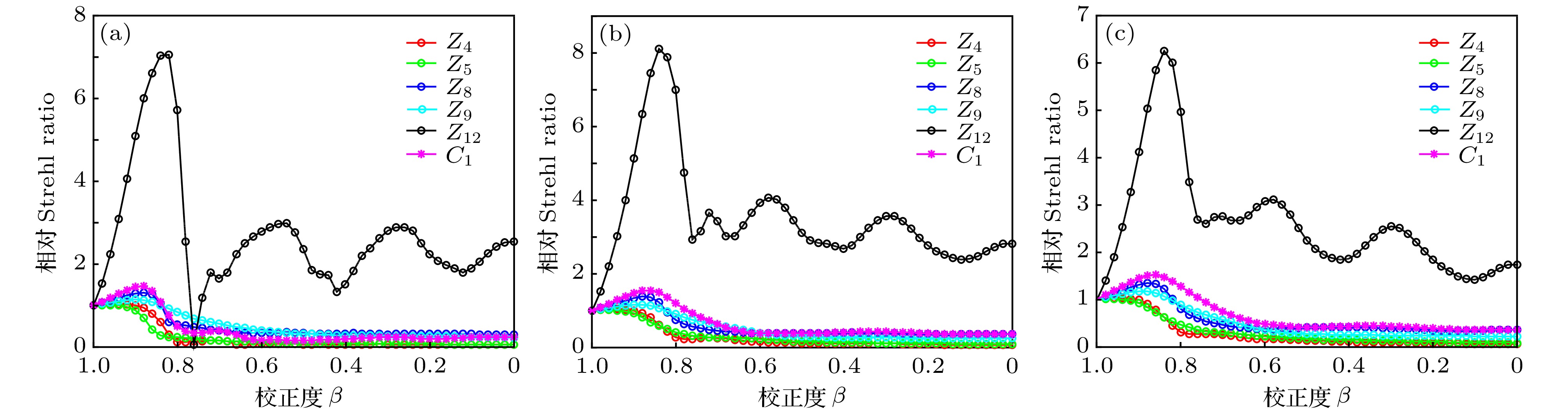 图 7 37单元变形镜不同噪声强度下复原图像的相对SR (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2
图 7 37单元变形镜不同噪声强度下复原图像的相对SR (a) var = (10–4)2; (b) var = (5 × 10–4)2; (c) var = (10–3)2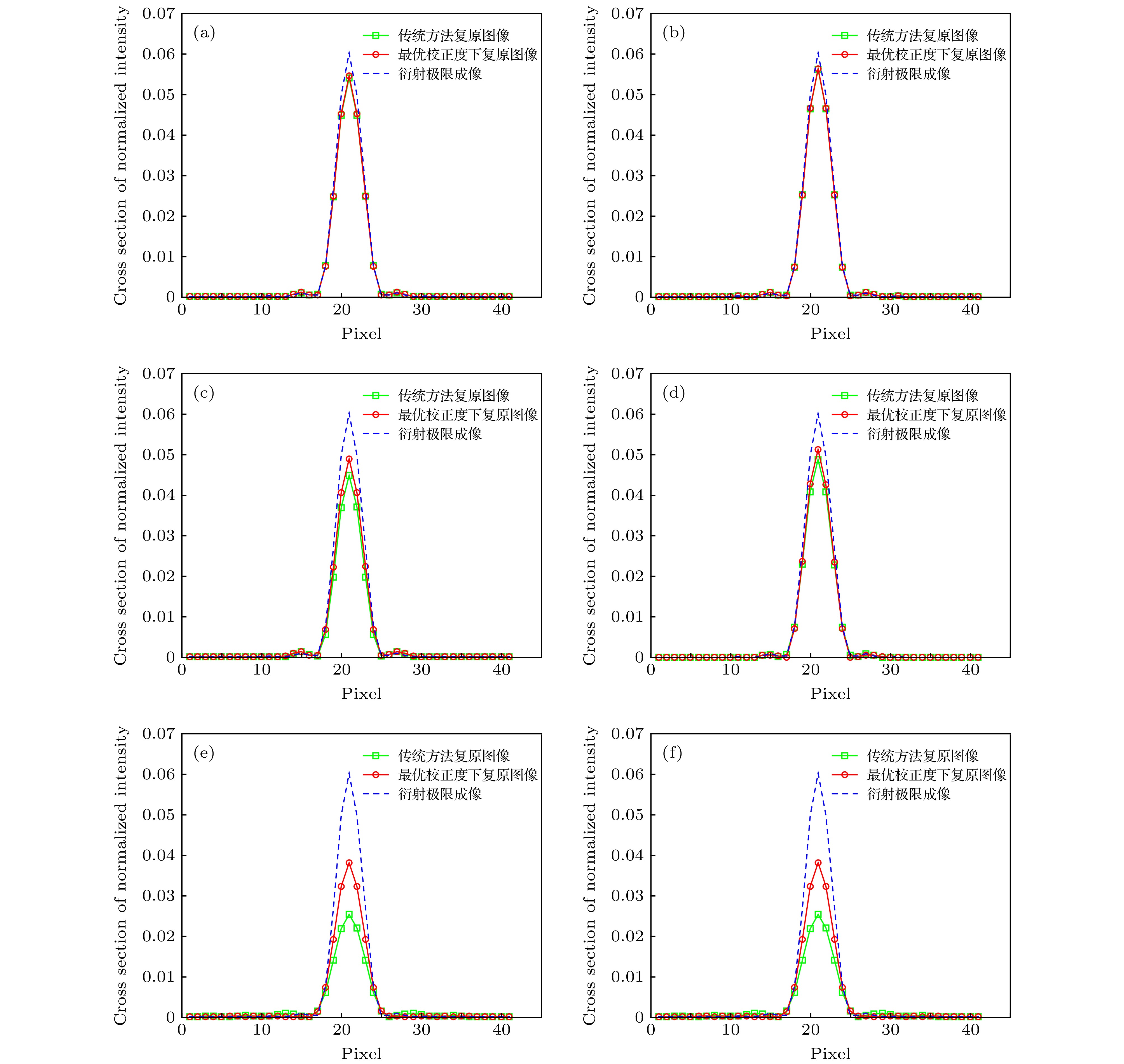 图 8 61单元变形镜在噪声方差(10–4)2下能量归一化截面图的比较 (a) Z4; (b) Z5; (c) Z8; (d) Z9; (e) Z12; (f) C1
图 8 61单元变形镜在噪声方差(10–4)2下能量归一化截面图的比较 (a) Z4; (b) Z5; (c) Z8; (d) Z9; (e) Z12; (f) C1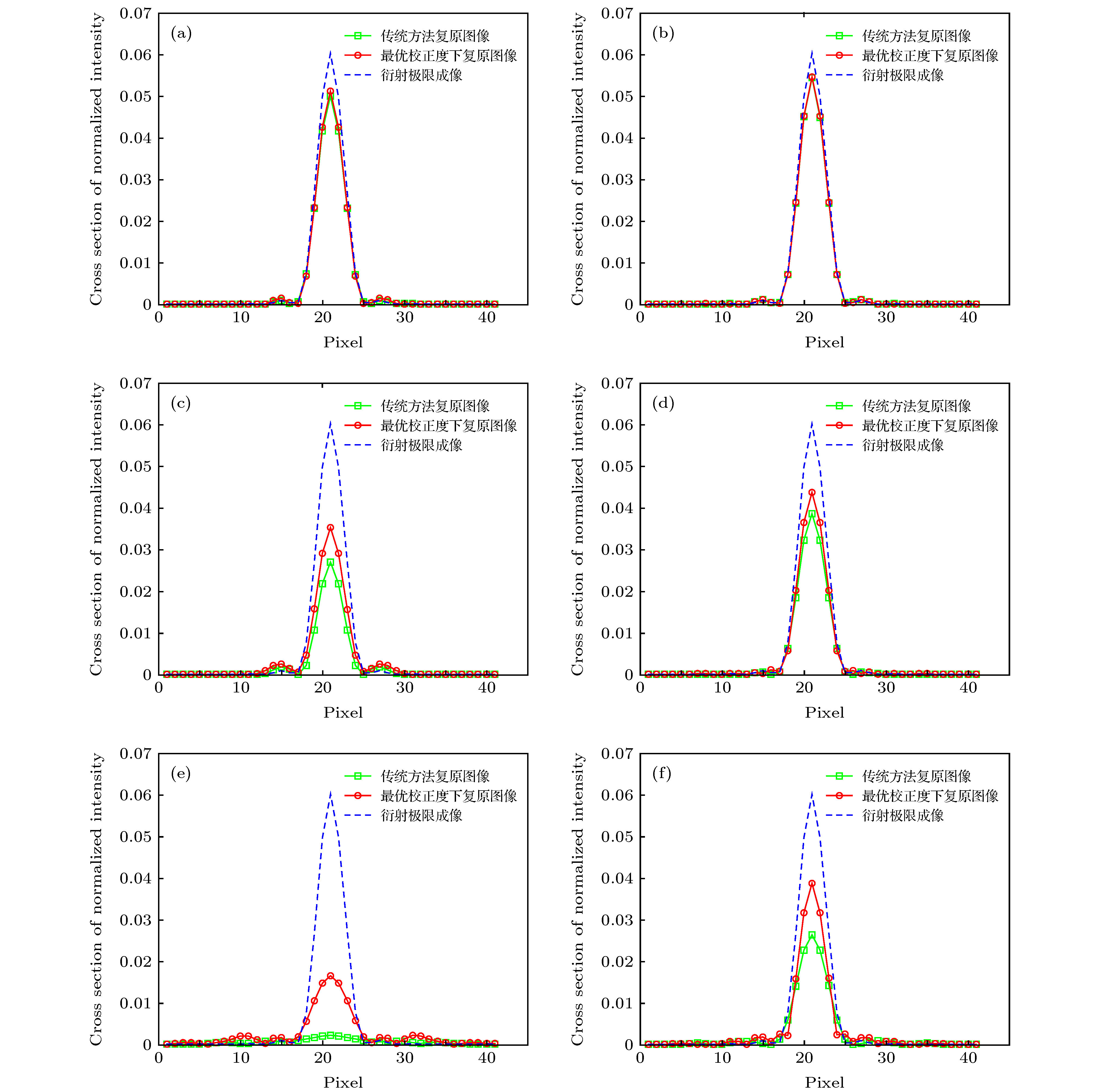 图 9 37单元变形镜在噪声方差(10–4)2下能量归一化截面图的比较 (a) Z4; (b) Z5; (c) Z8; (d) Z9; (e) Z12; (f) C1
图 9 37单元变形镜在噪声方差(10–4)2下能量归一化截面图的比较 (a) Z4; (b) Z5; (c) Z8; (d) Z9; (e) Z12; (f) C1