摘要: 拾取指定长度的半导体性碳纳米管对大规模制造碳纳米管场效应管具有重要意义. 本文提出了一种利用原子力显微镜探针和钨针对碳纳米管进行可控长度拾取的方法并进行了碳纳米管导电性分析. 在扫描电子显微镜下搭建微纳操作系统, 针对切割操作过程中原子力显微镜探针、钨针和碳纳米管的接触情况进行了力学建模和拾取长度误差分析. 建立了单根金属性碳纳米管、单根半导体性碳纳米管及碳纳米管束与钨针接触的电路模型, 推导了接入不同性质碳纳米管后电路的电流电压特性方程. 使用原子力显微镜探针对碳纳米管的空间位姿进行调整, 控制钨针对碳纳米管上目标位置进行通电切割, 同时获取切割电路中的电流电压数据. 实验结果表明, 本文提出的方法能够有效控制所拾取碳纳米管的长度, 增加碳纳米管与原子力显微镜探针的水平接触长度能够减小碳纳米管形变导致的拾取长度误差, 建立的电流电压特性方程能够用于分析碳纳米管的导电性.
关键词: 碳纳米管 /
位姿调整 /
长度控制 /
导电性分析 English Abstract Length-controllable picking method and conductivity analysis of carbon nanotubes Wang Ya-Zhou 1 ,Ma Li 1 ,Yang Quan 1 ,Geng Song-Chao 1 ,Lin Yi-Ni 1 ,Chen Tao 2 ,Sun Li-Ning 2 1.School of Mechatronic Engineering and Automation, Shanghai University, Shanghai 200072, China Fund Project: Project supported by the National Natural Science Foundation of China (Grant Nos. 61573238, 61433010)Received Date: 26 August 2019Accepted Date: 03 December 2019Published Online: 20 March 2020Abstract: In this paper, a length-controllable picking-up method of carbon nanotubes (CNTs) is proposed and the electrical performance data utilized for the conductivity analysis of CNT are also obtained. The micro-nano-operation system inside scanning electron microscope (SEM) is composed of 4 manipulation units each with 3 degrees of freedom, which is driven by piezoelectric ceramics and flexure hinges. In this micro manipulation system, an atomic force microscope (AFM) probe is used as the end effector to adjust the spatial pose of the CNT based on van der Waals force and two tungsten needles are used to cut the CNT from the target length and to measure the I-V characteristic data simultaneously. At first, the AFM probe is moved in the z direction to approach to the CNT until the end of the CNT is adsorbed onto the surface of the AFM probe. And then the AFM probe moves alternately in the x and z direction in order to stretch the CNT into a horizontal straight line, only in this way can the length of the CNT be measured accurately and can the cutting position be determined. Two tungsten needles cleaned by using hydrofluoric acid to remove the oxide layer are controlled to contact both sides of the cutting position on CNT and connected to the TECK 2280S power supply through the electric cabinet to apply a gradually increasing DC voltage, and the current in the circuit is measured and recorded by the TECK DMM7510 until the current abruptly changes to zero which indicates that the CNT between the tungsten needles has been cut off. The stress of the CNT in contact with the tungsten needles and the AFM probe are analyzed. The modeling of van der Waals force between AFM probe and CNT which can influence the pick-up length error caused by the deformation of CNT under the force of tungsten needles is completed. It is found that the contact length of them and the pick-up length error decrease while the van der Waals force between the AFM probe and CNT increases. The circuit models for contact between the tungsten needles and three operating objects, such as semiconducting CNT, metallic CNT and CNT bundle, are also established. In addition, the I-V characteristic equations of circuit model which can be used to fit the I-V data are derived separately. The CNT pick-up experiment is carried out and the results demonstrate that the proposed picking method can control the length of CNT effectively, but the conductivity of CNT can also be judged by fitting the I-V obtained experiment data through the derived I-V characteristic equations.Keywords: carbon nanotubes /pose adjustment /length control /conductivity analysis 全文HTML --> --> --> 1.引 言 碳纳米管(carbon nanotubes, CNTs)具有优异的电荷输运特性和一维静电学特性, 是半导体电子学研究的热点[1 -3 ] . 半导体性CNT (semiconducting CNT, s-CNT)载流能力高[4 ] 、载流子移动速度快[5 ,6 ] , 是作为场效应晶体管沟道的理想材料[7 -9 ] . 为大规模生产碳纳米管场效应管, 需要对从生长基底拾取可控长度CNT的操作方法进行研究. 此外, 目前通过控制催化剂的化学气相沉积法制备的s-CNTs阵列可以达到80%的纯度[10 ] , 但仍掺杂着部分的金属性CNT (metallic CNT, m-CNT), 且CNT具有互相捆绑成束的特性[11 ] , 即使作为沟道的CNTs中掺杂了单一的m-CNT杂质也能使场效应晶体管短路, 导致其通断电流比降低几个数量级[12 ] , 因此需要对所拾取的CNT进行导电性分析.[13 ] 在扫描电子显微镜(scanning electron microscope, SEM)下使用原子力显微镜(atomic force microscope, AFM)悬臂梁探针的针尖实现了对散落的CNT的拾取、移动以及杨氏模量的测量, 但该方法不适于对未断裂的CNT进行操作. 北京大学Wei等[14 ] 利用吸附于金属尖端的短CNT作为末端执行器, 通过焦耳热原理实现了对其他CNT的切割以及末端的削尖, 但该方法易受CNT的固有结构缺陷影响. 德国奥尔登堡大学Eichhorn等[15 ] 设计了微纳夹持器, 可以将空间中分布稀疏的CNT从基底上拉断并拾取, 但其尺寸较大, 难以在生长密集的CNT阵列中操作; 此外, 他们还提出了一种基于SEM图像模糊程度确定样品高度的方法[16 ] . 文献[17 -19 ]在SEM里搭建了多自由度纳米操作系统, 并使用AFM探针对基底上的CNT进行了拾取, 采用将CNT直接拉伸至断裂的方法, 断裂位置的随机导致了所拾取CNT长度的不可控. 使用电子束诱导沉积法将CNT固定在AFM探针表面能显著加强两者的连接强度并降低接触电阻[20 ,21 ] , 但沉积点会影响CNT的移动、装配等后续操作[22 ] . 清华大学Jiang课题组[23 ,24 ] 利用SEM下亮度差异对CNT的导电性进行了判断, 但该方法只能用于同一图像中不同CNT的相对比较. 上述方法无法实现CNT的可控长度拾取以及CNT的导电性测量.I -V )数据进行测量. 针对拾取过程中AFM探针、钨针和CNT的接触模型进行力学建模, 分析拾取长度误差大小和来源, 建立m-CNT, s-CNT和CNT管束与钨针接触的电路模型, 推导电路中接入不同性质CNT后的I -V 特性方程. 最后进行实验研究, 验证CNT可控长度拾取及其导电性分析方法的有效性.2.微纳操作系统 对CNT施加电压会破坏碳原子之间存在的碳-碳键, 造成CNT结构发生缺陷[25 ] , 若此时CNT受到拉力则会在缺陷处发生应力集中, 从而导致缺陷扩大直至CNT断裂[26 ] , 利用该原理可以实现对CNT的切割. 搭建了基于SEM (SU3500, Hitachi)的微纳操作系统, 系统包含一个微纳操作台、两根钨针(ST-20-0.5, GGB)、一个AFM悬臂梁探针(PNP-TR-Au, Nanoworld), 如图1 所示. 使用AFM探针将CNT拉伸至成水平直线形态以便对切割点进行定位, 同时对CNT施加预应力, 然后控制两钨针在切割点两侧接触CNT, 将该段CNT接入电路以完成CNT切割并进行导电性分析.图 1 微纳操作系统 (a) 微纳操作台; (b) AFM探针; (c) 钨针; (d) CNTs样品Figure1. Micro-nano manipulation system: (a) Micro-nano manipulation stage; (b) AFM probe; (c) tungsten probe; (d) CNTs sample.x , y , z 三个平移自由度, 采用粘滑驱动实现三自由度的粗定位, 采用柔性铰链驱动实现三自由度的精定位, 各操作单元的具体性能参数如表1 所列. 微纳操作系统安装于SEM真空腔内的样品台上, 信号线缆通过真空法兰与外部的电控箱连接以获取控制信号并反馈电信号, 操作者通过实时观察SEM图像获取操作系统状态信息并进行控制.性能参数 取值 粗定位 运动范围/mm $10 \times 10 \times 5$ 最大运动速度/mm·s–1 > 3 最小运动步长/nm < 100 精定位 运动范围/μm $20$ 最大运动速度/μm·s–1 $ > 45$ 开环控制分辨率/nm 0.1 闭环控制分辨率/nm 1 精度/nm 5
表1 微纳操作单元性能参数Table1. Performance parameters of micro-nano operating unit.3.力学建模与误差分析 使用电子束诱导沉积法将CNT固定在AFM探针表面后, 由于沉积点的存在, 被固定的CNT将无法被完整取下. 为避免影响拾取后对CNT进行的移动、装配等工作, 在操作过程中不采用电子束诱导沉积法等方式对CNT与AFM探针以及钨针的连接处进行加固, 则接触时的主要作用力为范德瓦耳斯力以及静电力. 静电力主要由样品表面受SEM电子束辐照所累计的电荷引起, 接地可以将电荷导出以避免静电力对拾取过程的影响[27 ] , 在对CNT通电切割操作前将导电胶、钨针与AFM探针接地, 则操作过程仅考虑范德瓦耳斯力作用.图2 所示. 图中${L_1}$ 表示预期拾取长度, 虚线表示理想状态下被拉伸成水平直线形态的CNT, 实线表示实际操作过程中由于受到钨针与CNT之间范德瓦耳斯力作用发生弯曲变形的CNT, 定义CNT粘附在导电胶上的部分为根部, AFM探针接触的部分为末端, $\alpha $ 表示CNT根部的变化角度, $\theta $ 表示CNT末端的变化角度.图 2 接触力学分析示意图Figure2. Schematic diagram of mechanics during contact.F D 、AFM探针与CNT之间的范德瓦耳斯力F A 以及钨针与CNT之间的范德瓦耳斯力F T , 则有$\alpha = \theta $ , F A = F D , 则有${L_0}$ , 而碳-碳键的断裂可能发生在两钨针与CNT接触点间的任意位置, 因此将产生长度误差$\Delta {L_0}$ , 其值在0—L 0 之间. 由于该误差仅由碳-碳键的断裂位置决定, 因此只能通过减小${L_0}$ 的大小以控制其范围. 此外, SEM图像无法观测深度信息, 当操作者选择${L_1}$ 作为预期拾取长度时, 实际拾取长度为CNT弯曲变形后对应的长度${L'_2} + {L'_3}$ . 对于${L_2}$ 部分, CNT的形变导致的长度误差$\Delta {L_2}$ 可表示为${L_3}$ 部分, CNT受到与钨针之间的范德瓦耳斯力F T 变形, 将导致部分CNT从AFM探针表面脱落, 其接触长度变为${L'_3}$ , 由于CNT总体长度不变, 长度误差$\Delta {L_3}$ 可由几何关系得: $\Delta {L_3} = 2\Delta {L_2}$ , 由于变形导致的拾取长度误差$\Delta {L_1}$ 可表示为2 )—(4 )式可得5 )式可知长度误差$\Delta {L_1}$ 随着F T /F A 以及${L_2}$ 值的减小而减小. 在使用钨针对CNT进行切割操作时, 为了使接触点获得足够高的定位精度, 均采用直径最小的钨针针尖部位与CNT接触, 因此两者之间的范德瓦耳斯力F T 是一个定值. 为了减小$\Delta {L_1}$ 并防止CNT从AFM探针表面完全脱离, 需要在切割操作前调整两者的接触状态, 减小悬空部分长度${L_2}$ 或增大范德瓦耳斯力F A .[17 ] , 接触模型如图3 所示.图 3 AFM探针与CNT的水平接触Figure3. Horizontal contact of AFM probe and CNT.d 为CNT直径; H 为CNT与AFM探针之间的接触距离; A 为CNT与AFM探针接触表面在真空环境下的Hamaker常数, 其中$ {A_{{\rm{Au}} \text-{\rm{Au}}}} = $ $5.47\! \times\! {10^{ - 19}}\;{\rm{ J}} $ , ${A_{{\rm{C}} \text- {\rm{C}}}} \!=\! 0.284 \!\times\!{10^{ - 19}}\;{\rm{ J}}$ , 则$ A\!=\!{A_{{\rm{C}} \text- {\rm{Au}}}} \!= $ $ \sqrt {{A_{{\rm{C}} \text- {\rm{C}}}}{A_{{\rm{Au}} \text- {\rm{Au}}}}} = 1.246 \times {10^{ - 19}}\;{\rm{ J}}$ .F A 为5 )和(7 )式可得d 、范德瓦耳斯力F T 以及距离H 为定值, 由(7 )式可得, 增加CNT与AFM探针的水平接触长度能够增大两者之间的范德瓦耳斯力F A , 由(8 )式可得$\mathop {\lim }\limits_{{L_3} \to {L_1}} \Delta {L_1} = 0$ , 即在不改变拾取长度${L_1}$ 的情况下, 增加${L_3}$ 可以减小拾取长度误差.4.电学分析 使用钨针对CNT进行切割操作和导电性测量, 电路如图4 所示, 两钨针分别接触CNT上目标切割点的两侧, 并通过电控箱与外部电源连接对CNT施加电压. 在使用气相沉积法制造的CNTs阵列中, 存在金属性和半导体性两种性质的CNT, 而其纳米级直径导致在SEM下很难分辨所选择的操作对象是单根CNT还是由多根缠绕贴合形成的CNT管束, 因此与钨针接触的CNT可能为单根s-CNT、单根m-CNT以及CNT管束三种. 下面针对理想状态下接入电路的三种CNT情况分别进行了I -V 特性方程推导.图 4 CNT切割及导电性测量电路Figure4. Circuit for CNT cutting and conductivity measurement.I -V 特性方程表现出非线性, 可表示为${I_{{\rm{ST}}}} = {I_{\rm{S}}}\left( {{{\rm{e}}^{e{V_{\rm{D}}}/nKT}} - 1} \right)$ , 其中, I ST 表示流经肖特基势垒的电流, I S 表示反向饱和电流, e 表示电子电荷量, V D 表示偏置电压, n 表示工艺因子, K 为玻尔兹曼常数, T 表示温度. 偏置电压V D 为负时, 肖特基势垒可被等效为固定电阻R r , 偏置电压V D 为正时, 令$\alpha = e/nKT$ , 则正向等效电阻R f 为V D 为正时, 等效电阻R f 随电流的增大而减小, 因此不能采用简单的欧姆定律对电路进行分析. 对于具有肖特基势垒的电路, 电路中各点电势高低符合基尔霍夫电压定律, 电路中电流大小符合基尔霍夫电流定律, 则单根s-CNT电路中伏安特性方程为R S 表示接入电路的s-CNT的固有电阻, V 表示电源施加的总电压, 将两根钨针短接时测得电路中电阻为$3 \;\Omega$ , 而CNT的电阻通常在兆欧级, 故忽略电路电阻.${R_{\rm{C}}}$ 由接触材料的性质以及接触区域的形状决定[28 ] , 可表示为${R_{\rm{C}}} = {\rho _{\rm{C}}}/{A_{\rm{C}}}$ , 其中${\rho _{\rm{C}}}$ 为m-CNT和钨针接触时的特殊电阻率, 该量主要由接触区域的局部化学性质以及费米能级决定, ${A_{\rm{C}}}$ 表示接触区域. 对于已经接触的钨针和CNT, 操作过程中位置固定, 接触区域不再变化, 因此接触电阻是一个固定值, 这意味着m-CNT电路的总电阻为定值, 大小为$2{R_{\rm{C}}} + {R_{\rm{M}}}$ , 其中${R_{\rm{M}}}$ 表示m-CNT的固有电阻, 接入m-CNT的电路I -V 特性方程为m 根s-CNT以及n 根m-CNT, 则电路中总电流为12 )式中m 和n 的值会在操作的不同阶段发生变化, 无法给出一个固定参数的式子来表征整个操作过程. 但在每个操作阶段内, 电路中接入的CNT数目都不发生变化, 这意味着即使在拾取实验的不同阶段m , n 的值都可能会发生变化, 但是在每个阶段内m , n 都是恒定的. 因此, 在实验的每一个阶段所测的CNT的I -V 特性都可以采用(12 )式来表示.[29 ,30 ] , 这可能导致使用钨针测量s-CNT的伏安特性时出现近线性对称的I -V 曲线, 导致将CNT性质错判为金属性. 因此在实验前要除去氧化层和灰尘杂质等影响较大的因素.5.实验测试及结果分析 采用图1 所示的微纳操作系统, 将AFM探针竖直安装来验证CNT与AFM探针接触长度${L_3}$ 对CNT末端变化角度$\theta $ 和拾取长度误差$\Delta {L_1}$ 的影响. 将AFM探针水平安装并采用双钨针操作对CNT的可控长度拾取方法及导电性分析进行验证.5.1.CNT与AFM探针接触长度与拾取长度误差检测 5.1.CNT与AFM探针接触长度与拾取长度误差检测 为了验证CNT与AFM探针的接触长度和拾取长度误差的关系, 需要对CNT的形变量进行检测. 由于SEM图形没有深度信息, 无法观察到CNT在z 方向的形变, 因此将AFM探针沿竖直方向安装, 控制钨针沿y 方向接近CNT, 对接触长度${L_3}$ 以及与钨针接触前后CNT的形变进行测量.x 方向拉伸成直线形态后, 继续运动至CNT与AFM探针表面发生相对滑动, 此时施加在CNT末端的拉力与两者间范德瓦耳斯力F A 相等. 控制钨针沿y 向运动至CNT发生形变并与钨针接触. 固定预期拾取长度${L_1}$ 并改变CNT与AFM探针接触长度${L_3}$ , 通过测量CNT的末端变化角度$\theta $ 、预期长度${L_2}$ 及实际长度${L'_2}$ 对误差进行分析. 此外, 由于拾取操作过程中两钨针间距较小, 且对CNT的作用力方向相同, 在力学分析中可将两钨针的作用力合并计算, 这与采用单钨针操作时力学表现相同, 故在此实验中采用单钨针进行操作. 实验结果如图5 所示.图 5 L 1 为15 μm时不同L 3 长度CNT的弯曲变形 (a), (d) L 3 = 4.10 μm; (b), (e) L 3 = 6.41 μm; (c), (f) L 3 = 8.24 μmFigure5. Bending deformation of CNT with same L 1 (15 μm) and different L 3 : (a), (d) L 3 = 4.10 μm; (b), (e) L 3 = 6.41 μm; (c), (f) L 3 = 8.24 μm.图5 所示实验中, 分别对三组CNT与AFM探针的接触长度L 3 和CNT形变数据进行了测量, 预期拾取长度L 1 均为15 μm. 图5(a) —(c) 分别表示在接触长度L 3 为4.10, 6.41, 8.24 μm时CNT与钨针接触前的状态, 图5(d) —(f) 分别对应CNT与钨针接触后的变形情况. 采用SEM软件测得, 图5(a) 和图5(d) 中CNT与钨针接触前后的变化角度$\theta $ 为2.5°, CNT悬空部分长度L 2 为10.9 μm, CNT形变引起的拾取长度误差为0.0104 μm; 图5(b) 和图5(e) 中, 接触前后变化角度$\theta $ 为1.1°, L 2 为8.59 μm, 拾取长度误差为0.0016 μm; 图5(c) 和图5(f) 中, 接触前后变化角度$\theta $ 为0.8°, L 2 为6.76 μm, 拾取长度误差为0.0007 μm. 由实验数据可知在预期拾取长度L 1 不变时, 增加CNT与AFM探针的接触长度L 3 可以减少拾取长度误差, 这验证了(8 )式的正确性.5.2.CNT拾取实验 -->5.2.CNT拾取实验 实验前, 为了避免钨针表面的氧化层等对实验结果造成影响, 采用氢氟酸除去钨针表面的氧化钨, 并使用异丙醇和超声波清洗仪对钨针进行清洗以除去灰尘等杂质.I -V 数据. CNT样品及各探针的位置分布如图6 所示.图 6 CNTs及探针位置分布Figure6. Position of CNTs and probes.图7 所示, 首先使AFM探针运动至CNT下方, 控制两者相交部分长度, 并使AFM探针沿z 方向垂直向上运动, 当两者距离足够小时, CNT末端受到与AFM探针之间范德瓦耳斯力的影响, 将被吸附至探针表面. 在拉伸过程中采用图7(c) 中的箭头所示的路径, 先沿z 向再沿x 方向以小步距多次数重复移动AFM探针, 可以将CNT吸附在AFM探针表面部分与悬空部分均拉伸至直线状态, 使两部分的长度均可通过测量得出.图 7 AFM探针拉伸CNT操作示意图Figure7. Stretching of CNT with AFM probe图8(a) 所示的CNT作为操作对象, 控制AFM探针运动至CNT末端下方. 使AFM探针以1 μm的步距沿z 方向向上运动, 并在观察到图8(a) 和图8(b) 所示CNT末端的形态变化时停止, 此时CNT已经与探针发生接触. 对两者的接触姿态进行判断, 将AFM探针沿y 方向移动3 μm, 观察到图8(b) 和图8(c) 中只有CNT末端跟随AFM探针移动, 表明两者接触状态如图7(b) 所示, 按照图7(c) 中的轨迹移动AFM探针至CNT被吸附的部分呈直线状. 将视野移动至CNT根部, 调整SEM焦距使清晰度达到最高, 而后保持观测焦距恒定, 微调AFM探针高度, 当探针上表面移动至焦平面时清晰度最高, 此时AFM探针与CNT根部处于同一水平高度, 拉伸CNT悬空部分至直线状, 如图8(d) 所示, CNT位姿调整完成. 在CNT拉伸至水平直线状态后, 可以使用SEM软件直接测量CNT与AFM探针接触部分的长度, 并通过调整CNT悬空部分的长度控制最终拾取长度.图 8 接触检测与位姿判断Figure8. Contact detection and position judgment.图9 所示, 确定切割点位置后, 将两钨针针尖分别移动至切割点两侧, 并依次与CNT接触, 如图9(a) 所示. 控制两根钨针使用直径最小的针尖处在不互相接触的情况下, 尽可能接近CNT上切割点以减少拾取长度误差, 本次实验调整两钨针触点间距为1 μm. 钨针与CNT接触后, 在钨针上施加一个稳定增加的直流电压并记录电路中的电流变化. SEM的电子束会对电路中的电流造成影响[31 ] , 因此在测试过程中, 关闭了SEM的成像功能, 对CNT的状态通过电流值来判断, 当电路中的电流大小变为0时表明CNT已经被切断, 如图9(b) 所示. 本次实验选取${L_2}$ 长度为14 μm, 所拾取CNT悬空部分长度为14.6 μm, 拾取长度误差为0.6 μm.图 9 CNT切割过程 (a)钨针与CNT接触; (b) CNT断裂Figure9. Cutting process: (a) Contact of probes and CNT; (b) CNT’s breakdown.5.3.实验结果分析 -->5.3.实验结果分析 通过对CNT拾取操作过程分析, 实验主要包括两种误差. 一是位姿引起的长度误差, CNT在空间中的位姿并非水平, 而是存在一定倾角. 该倾角来源于操作者使用焦平面距离判断法调整AFM探针高度时对清晰度的主观判断偏差, 这导致CNT的末端及根部未被调整至同一水平面上. 二是两钨针与CNT接触点之间的距离导致的长度误差, 为保证两钨针之间不发生触碰导致电路短路, 两钨针之间保持一定的距离${L_0}$ , 而断裂会发生在该段的任意位置, 从而导致拾取长度误差$\Delta {L_0}$ . 在重复试验中将切割点定位在两钨针与CNT接触点的中部, 所测拾取长度误差均小于${L_0}/2$ , 表明该方法可将拾取长度误差$\Delta {L_0}$ 减小50%, 但这对操作者的操作水平要求较高, 且耗时较长. 此外, 减小钨针的直径可以在两钨针不接触的情况下缩小两者间的距离, 这也能够对$\Delta {L_1}$ 起到控制效果.图10 给出了操作目标为单根CNT时的I -V 曲线. 采用(10 )式对图10 中I -V 数据进行拟合, 拟合优度R 2 为0.99978, 残差平方和为0.03726. 采用(11 )式对图10 实验数据进行拟合, 拟合优度R 2 为0.98974, 残差平方和为6.73692. 从拟合效果可以看出(10 )式优于(11 )式, 说明目标CNT的性质是(10 )式所代表的半导体性, 拟合结果为$V = \dfrac{1}{{0.6605}}\ln \left( {\dfrac{I}{{14.87823}} + 1} \right) + 0.03509 I$ , 这表示$\alpha $ 大小为0.6605, 肖特基势垒的反向饱和电流I S 为14.87823 μA, 电路中CNT固有电阻R S 及肖特基势垒的反向等效电阻R r 之和为0.03509 MΩ.图 10 CNT的I -V 数据及拟合曲线Figure10. I -V data of CNT and fitting curve.图11 给出了拾取目标为CNT管束时的I -V 曲线, 可以看出测量的I -V 曲线明显分为了5段, 电路中的电流呈阶段性减小, 表明目标CNT出现了五次断裂现象, 假设不存在性质完全相同的CNT, 这意味着操作目标是由五根CNT组成的CNT管束, 且各CNT之间存在并联关系.图 11 CNT管束的I -V 数据及拟合曲线Figure11. I -V data of CNT bundle and fitting curves.图11 中I -V 曲线标记为a, b, c, d, e五段, 并按照断裂先后顺序对CNT从1—5编号, 则a段曲线代表CNT管束未发生断裂时的I -V 特性, b段曲线代表1号CNT断裂后管束的I -V 特性, c段曲线代表1号和2号CNT断裂后的管束I -V 特性, d段曲线代表4号和5号CNT总的I -V 特性, e段曲线代表5号CNT的I -V 特性.图11 可以看出a段曲线具有明显的非线性特征, 表明CNT管束中存在s-CNT, 并在与钨针的接触区域形成了肖特基势垒. e段曲线则显示了明显的线性特征. 对5号CNT的I -V 曲线进行拟合, (10 )式的拟合优度R 2 为0.963, (11 )式的拟合优度R 2 为0.99993, 则5号CNT的性质为金属性, 其拟合结果为$V = 0.185805 I$ , 表明电路中电阻为0.185805 MΩ.12 )式从图11 的I -V 数据中去除5号CNT对电路中总电流的贡献, 可以求出4号CNT的I -V 特性数据, 对其进行拟合, (10 )式的拟合优度R 2 为0.978, 优于(11 )式的拟合优度0.856, 这表明4号CNT是半导体性, 其特性式为$ V\!=\! \dfrac{1}{{1.02543}}\times $ $\ln \left( {\dfrac{I}{{0.01216}} + 1} \right) + 0.1147 I$ .I -V 特性方程的正确性, 表明推导结果能够用于CNT的导电性分析.6.结 论 本文采用AFM探针和双钨针对CNT进行可控长度拾取以及导电性分析. 建立了拾取过程中CNT与AFM探针及钨针接触的力学模型, 并依据模型进行了拾取长度误差分析. 理论分析表明, 所拾取CNT的长度误差与CNT的空间位姿变化以及两钨针与CNT触点间距大小有关, 增加AFM探针与CNT的接触长度可以增加两者间范德瓦耳斯力, 减小由CNT形变导致的拾取长度误差. 分别建立了钨针与单根s-CNT、单根m-CNT和CNT管束接触时的切割电路模型并推导了I -V 特性式, 推导结果表明, 目标为单根s-CNT时电路I-V 特性方程为非线性, 目标为单根m-CNT时电路I -V 特性方程为线性, 目标为CNT管束时电路的I -V 特性方程将呈阶段性变化. 实验证明, 增加CNT与AFM探针的水平接触长度可以有效控制由CNT形变造成的拾取长度误差. 切割过程所测得切割电路I -V 数据与所推导的三种接触情况下电路I -V 特性方程相符, 通过曲线拟合能够判断CNT是金属性还是半导体性. 采用本文所提出的方法可以有效控制拾取的CNT长度并分析其导电性. 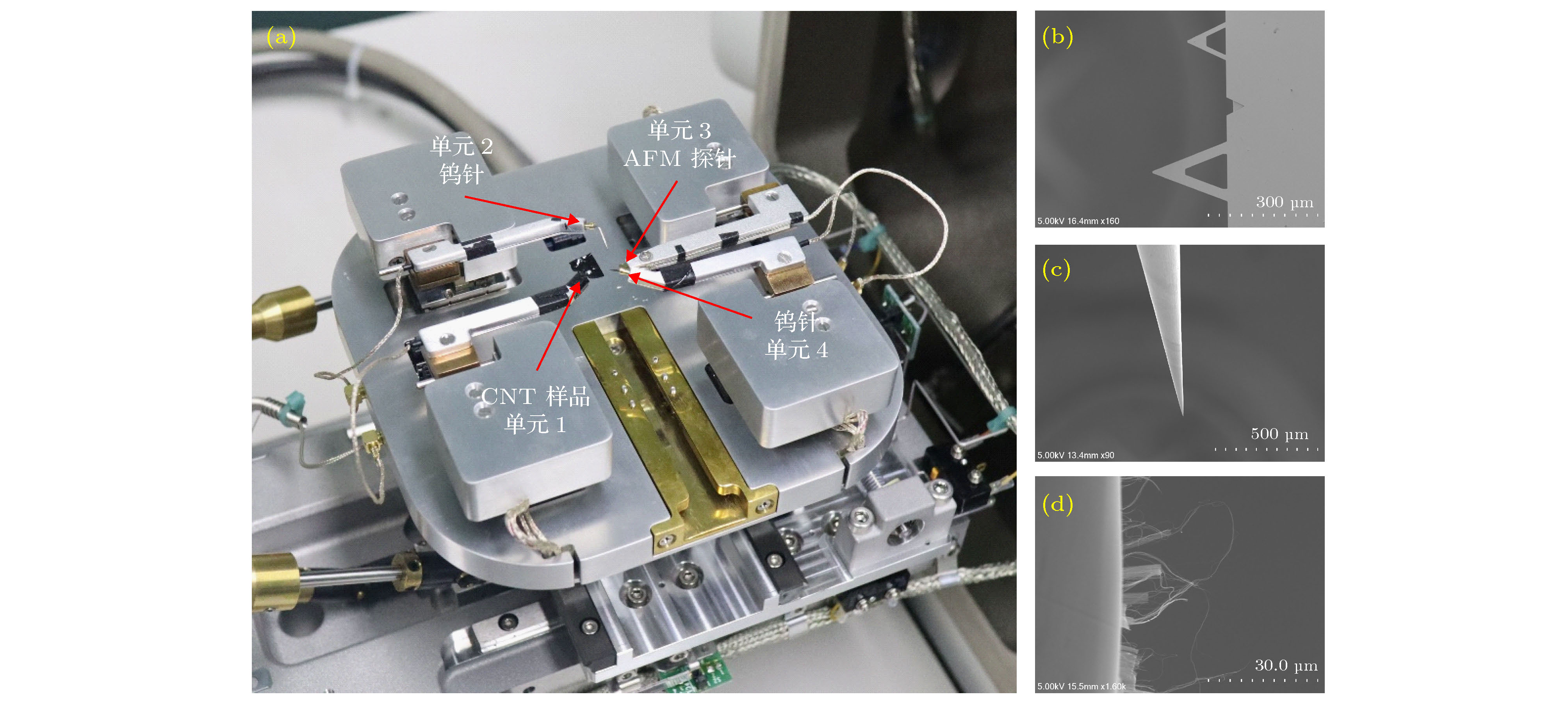 图 1 微纳操作系统 (a) 微纳操作台; (b) AFM探针; (c) 钨针; (d) CNTs样品
图 1 微纳操作系统 (a) 微纳操作台; (b) AFM探针; (c) 钨针; (d) CNTs样品


 图 2 接触力学分析示意图
图 2 接触力学分析示意图
















 图 3 AFM探针与CNT的水平接触
图 3 AFM探针与CNT的水平接触







 图 4 CNT切割及导电性测量电路
图 4 CNT切割及导电性测量电路

















 图 5 L1为15 μm时不同L3长度CNT的弯曲变形 (a), (d) L3 = 4.10 μm; (b), (e) L3 = 6.41 μm; (c), (f) L3 = 8.24 μm
图 5 L1为15 μm时不同L3长度CNT的弯曲变形 (a), (d) L3 = 4.10 μm; (b), (e) L3 = 6.41 μm; (c), (f) L3 = 8.24 μm


 图 6 CNTs及探针位置分布
图 6 CNTs及探针位置分布 图 7 AFM探针拉伸CNT操作示意图
图 7 AFM探针拉伸CNT操作示意图 图 8 接触检测与位姿判断
图 8 接触检测与位姿判断
 图 9 CNT切割过程 (a)钨针与CNT接触; (b) CNT断裂
图 9 CNT切割过程 (a)钨针与CNT接触; (b) CNT断裂






 图 10 CNT的I-V数据及拟合曲线
图 10 CNT的I-V数据及拟合曲线 图 11 CNT管束的I-V数据及拟合曲线
图 11 CNT管束的I-V数据及拟合曲线


