全文HTML
--> --> -->表面微结构的出现将不可避免地影响与之接触液体的浸润特性[10,11]. 微结构表面的浸润行为与微结构的形状、尺寸、阵列方式等密切相关. 通过调整微结构参数可以实现液滴在微结构表面的各向异性浸润[12-17], 这与液滴在微结构表面不同方向上的动态铺展能力和浸润时所需克服的能量壁垒不同有关[18]. 微结构表面各向异性润湿行为可以使液体按照特定的方向进行运动[19]. 为了更好地利用微结构表面的各向异性润湿特性, 研究和了解微结构参数对液滴浸润行为的影响规律非常关键.
Chung等[12]研究了具有正弦横截面的一维条状微结构表面液滴的各向异性浸润行为, 结果显示, 液滴各向异性浸润程度主要由微结构的高宽比主导. 研究表明, Wenzel状态有利于形成各向异性浸润, 而Cassie状态会阻止浸润的各向异性. Priezjev[13]研究表明, 表面微沟槽方向与液体流动方向的夹角会明显影响和改变液体流动的阻力和滑移长度等. Kim和Suh [14]利用弯曲聚合物纳米线的定向铺展浸润性质实现了对微流动的控制, 结果显示, 液体在沿着和背向纳米线弯曲方向上的流速相差约六倍. Wang等[17]利用微纳米结构的各向异性浸润性质在微流控系统中实现了微流体流动方向的控制, 并通过控制微结构参数实现液体单向或各向异性流动.
液滴在微结构表面的各向异性的浸润行为表征了液体运动黏滞阻力的各向异性. 液体各向异性浸润性质对于微流控器件中微流体运输、流动方向的控制来讲非常实用和关键[6,17,20], 具有十分广阔的应用前景. 本文研究和分析了微矩形凹槽宽度和肋板宽度对液滴各向异性浸润行为的影响规律以及机理, 为微矩形凹槽在微流控芯片中微流动行为控制的应用提供技术支持.
2.1.样品制备与表征
采用光刻的方法在硅片表面加工微矩形凹槽结构, 其结构示意图和扫描电子显微镜(scanning electron microscope, SEM)照片如图1所示, 其中R是微矩形凹槽的肋板宽度, G是微矩形凹槽的宽度, D是微矩形凹槽的深度. 本文主要研究微矩形凹槽宽度G和肋板宽度R对液滴浸润行为的影响规律. 实验制备的表面微结构参数如表1所列, 其中微结构的尺寸误差为 ± 0.2 μm.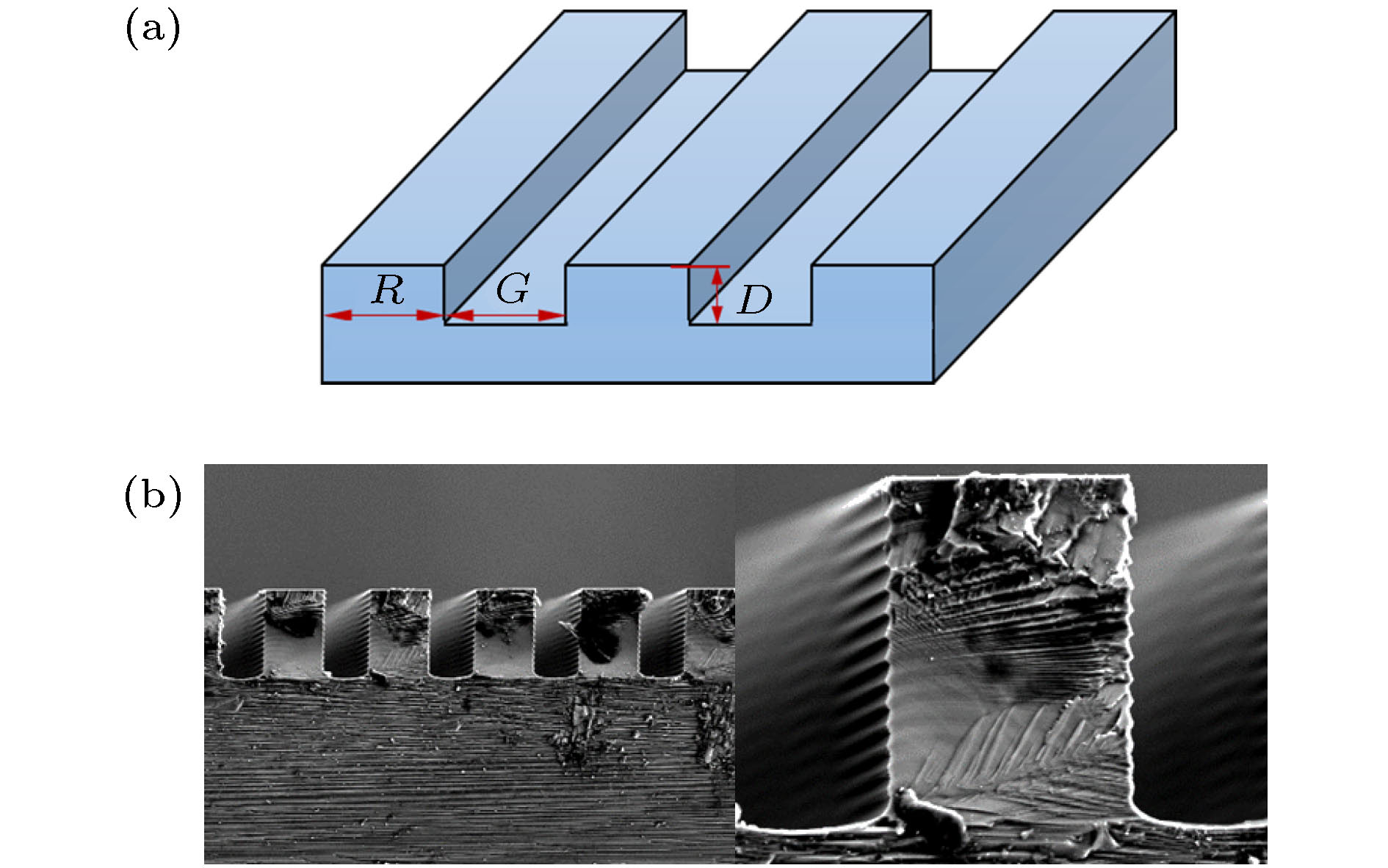 图 1 微矩形凹槽结构示意图(a)及实际被测表面的SEM图(b)
图 1 微矩形凹槽结构示意图(a)及实际被测表面的SEM图(b)Figure1. Schematic diagram of (a) micro-rectangular-groove surface and (b) the SEM images of the tested surface.
| 序号 | G/μm | R/μm | D/μm | Solid fraction R/(R + G) |
| 1 | 5 | 5 | 19 | 0.50 |
| 2 | 7 | 5 | 19 | 0.42 |
| 3 | 9 | 5 | 19 | 0.36 |
| 4 | 11 | 5 | 19 | 0.31 |
| 5 | 13 | 5 | 19 | 0.28 |
| 6 | 9 | 7 | 19 | 0.44 |
| 7 | 9 | 9 | 19 | 0.50 |
| 8 | 9 | 11 | 19 | 0.55 |
| 9 | 9 | 13 | 19 | 0.59 |
表1微矩形凹槽的尺寸参数
Table1.Parameters of micro-rectangular grooves used in the experiments.
2
2.2.表面润湿行为的表征
采用接触角测量仪(SDC-350)进行测试, 分析液滴在微结构表面接触角和润湿状态, 进而获得微结构参数对液滴浸润行为的影响规律. 液滴在微矩形凹槽表面具有浸润各向异性, 如图2所示, 即液滴在不同方向上的接触角不同. 针对微矩形凹槽表面相互垂直的两个特征方向上接触角分别定义为垂直接触角θ⊥和平行接触角θ//. 同时定义沿着沟槽方向液滴接触基底的宽度为L, 垂直于沟槽方向液滴接触基底的宽度为W, 如图2(b)和图2(c)所示.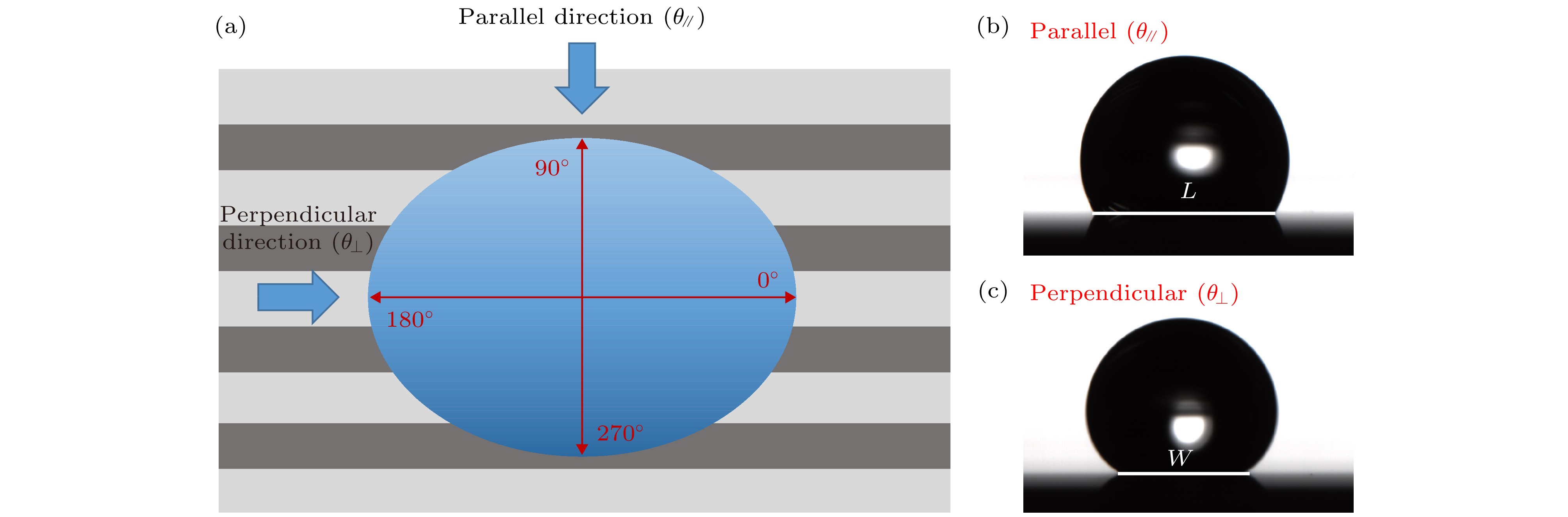 图 2 微矩形凹槽表面各向异性浸润行为
图 2 微矩形凹槽表面各向异性浸润行为Figure2. Anisotropic wetting behavior on micro-rectangular-groove surface.
测量液体采用去离子水, 测试液滴体积为2 μL, 温度约为20°, 湿度为30%左右. 为更好地表征液滴浸润行为, 并使实验结果具有统计性, 避免由于微结构放置误差影响接触角测量的精确性, 测试了液滴360°方向上的接触角, 每间隔15°测量一个值, 液滴测量装置示意图如图3(a)所示. 为避免测试过程中液滴的蒸发影响测试结果, 整个测试时间小于3 min, 液滴旋转一周左右两侧接触角的变化如图3(b)所示, 可以看出液滴蒸发的影响较小. 图3(b)中0°—360°角度坐标的定义见图2(a), 表征了被测液滴相对沟槽方向的夹角; 左侧纵坐标为接触角, 表示了对应等直径圆的接触角大小. 根据图2(a)中对样品旋转角度定义, θ90°和θ270°即为垂直于沟槽方向液滴两侧的接触角θ⊥; θ0°和θ180°即为平行于沟槽方向液滴两侧接触角θ//.
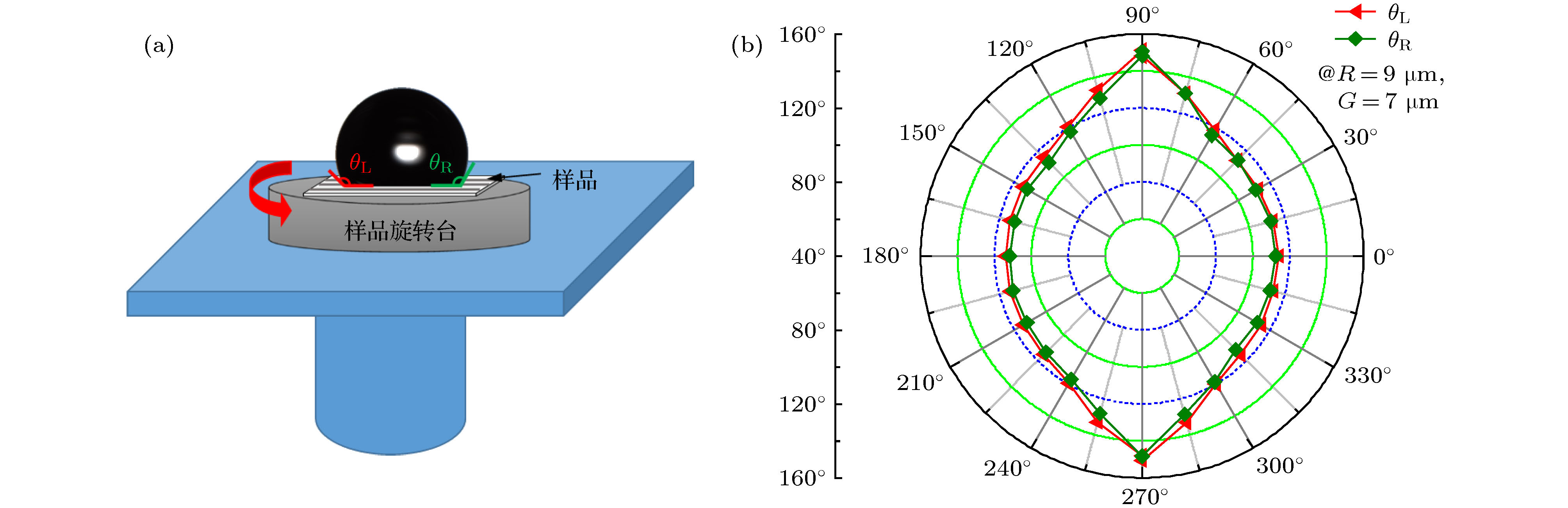 图 3 (a)实验测试装置示意图; (b)表面各向异性接触角表征
图 3 (a)实验测试装置示意图; (b)表面各向异性接触角表征Figure3. (a) Schematic diagram of experimental tool; (b) the description of surface anisotropic wetting contact angle.
3.1.光滑表面的浸润行为
为研究分析微矩形凹槽对液滴浸润行为的影响规律, 首先测试了光滑表面液滴的浸润行为, 结果如图4所示, 其静态接触角为73° ± 2°, 前进角为80°, 后退角为51°, 即光滑表面为亲水表面. 实验中所有被测试表面均在丙酮、酒精、去离子水三种溶液中依次超声清洗3 min, 然后使用高纯氮气吹干. 实验测试采用的光滑硅片表面与加工有微结构表面为同一硅片, 以保证微结构表面的固体部分与光滑硅片表面的亲疏水性的相同. 图 4 光滑硅片表面接触角
图 4 光滑硅片表面接触角Figure4. Contact angle of smooth silicon surface.
2
3.2.微结构表面浸润行为
研究分析了微矩形凹槽宽度G和肋板宽度R对液滴浸润行为的影响规律, 结果如图5所示. 结果显示, 当微矩形肋板宽度R相同时, 随着凹槽宽度G的增加, 平行方向接触角θ0°和θ180°均逐渐增大, 而垂直方向的接触角θ90°和θ270°基本保持不变, 如图5(a)所示. 而当微凹槽的宽度G不变时, 随着肋板宽度R的减小, 液滴沿着凹槽平行方向的接触角θ0°和θ180°均逐渐增大, 而垂直方向的接触角θ90°和θ270°仍然保持基本不变, 结果如图5(b)所示. 图 5 (a)微矩形凹槽宽度和(b)肋板宽度对液滴浸润行为的影响
图 5 (a)微矩形凹槽宽度和(b)肋板宽度对液滴浸润行为的影响Figure5. Influences of the groove width (a) and ridge width (b) of micro-rectangular-groove on the surface wetting behavior.
综合图5(a)和图5(b)的结果可以发现, 在测试采用的微结构参数范围内, 微结构凹槽和肋板宽度对垂直方向接触角θ⊥影响基本可以忽略; 但对液滴沿着平行方向的接触角θ//影响较大, 且平行方向接触θ//与肋板宽度R成反比, 与凹槽宽度G成正比. 同时, 液滴在平行方向的接触角θ//为最小值, 随着液滴被测试与凹槽平行方向夹角的增加接触角逐渐变大, 当达到垂直方向时接触角θ⊥为最大值, 且微结构表面任意方向的接触角均大于光滑表面的接触角. 结果表明, 微结构会明显影响液体的浸润行为, 且液滴沿各方向不同的接触角表明液滴具有不同的运动阻力. 平行于沟槽方向的液滴运动的阻力或能量壁垒较小, 液滴容易铺展因而液滴半径较大, 接触角较小; 而垂直于沟槽方向液滴运动阻力较大, 液滴也不易铺展, 因此其半径较小, 接触角大; 而在与沟槽方向成0°—90°范围内液滴运动的阻力处于两极限中间.
进一步从图5中提取出平行方向的接触角θ// (为θ0°和θ180°角度平均值)和垂直方向接触角θ⊥ (θ90°和θ270°角度平均值), 得到如图6所示的平行接触角θ//和垂直接触角θ⊥随微结构表面固体面积比的变化规律. 由图6可以看出, 垂直接触角θ⊥随固体面积比增加基本保持不变; 平行接触角θ//随固体面积比的增加而基本呈线性降低.
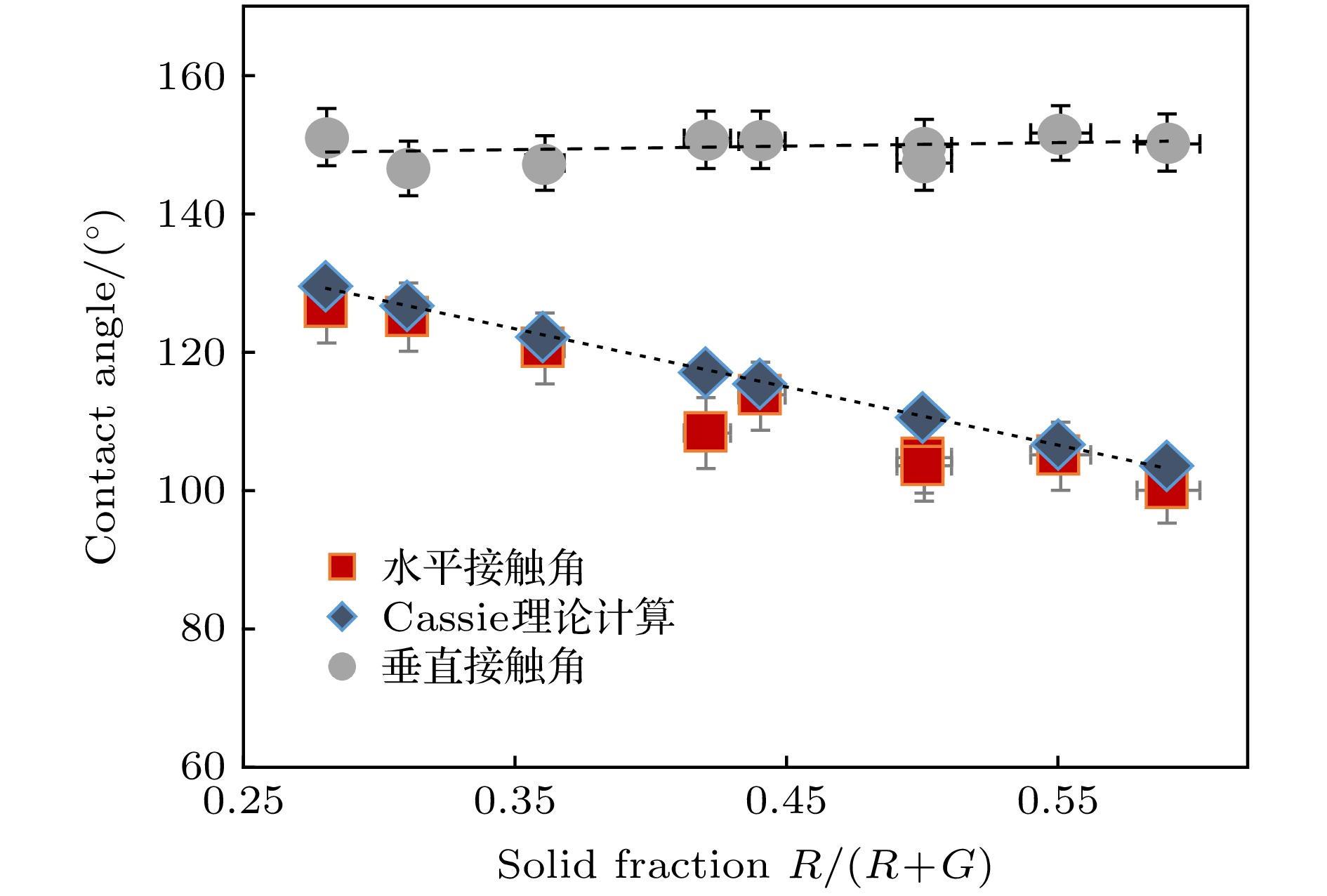 图 6 微结构表面固体面积比对接触角的影响
图 6 微结构表面固体面积比对接触角的影响Figure6. Influences of solid fraction on surface anisotropic contact angle.
液滴在不同方向接触角的大小与其在该方向的运动黏滞阻力有关, 因此液滴各向异性的接触角必然会导致液滴沿各个方向浸润长度不同, 即液滴为非球形而具有一定的变形, 实验测试得到液滴的变形比和特征方向接触角比值如图7所示. 由图7可知, 液滴变形比L/W (液滴平行方向润湿长度L与垂直方向润湿长度W的比值)与微结构固体面积比成正比, 且与特征方向接触角比值θ⊥/θ//成正比, 因此可以通过调控微结构参数可以实现不同方向上液滴的运动阻力的调控. 该结果对微流控芯片中液体流动行为的调控非常关键, 通过调整微流道与微凹槽的夹角可实现微流体速度的控制.
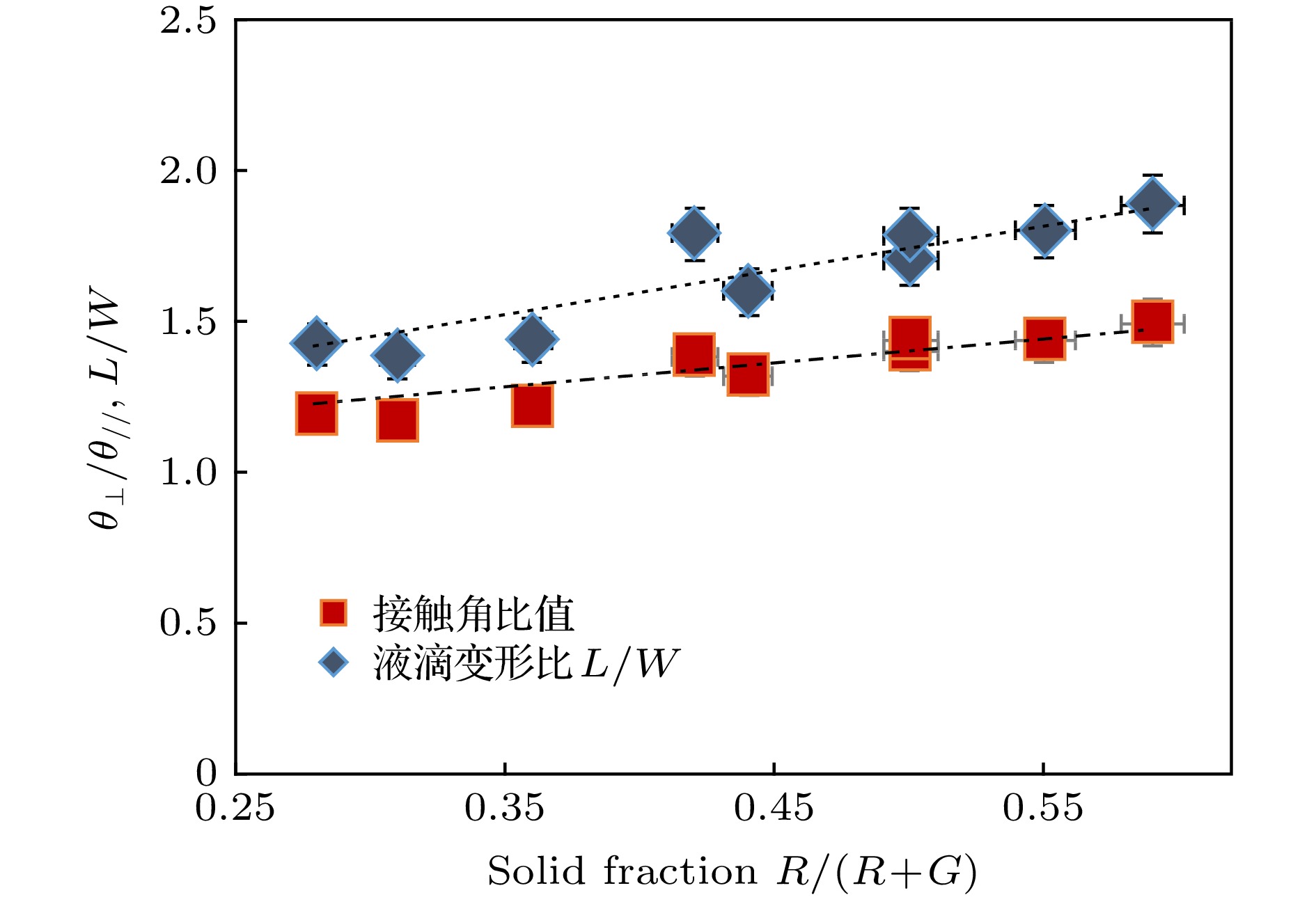 图 7 微结构表面液滴接触角各向异性和变形比变化规律
图 7 微结构表面液滴接触角各向异性和变形比变化规律Figure7. Influences of solid fraction on the ratio of θ⊥/θ// and droplet deformation ratio L/W.
液滴在微结构表面的浸润行为与基底表面能和表面形貌密切相关. 对于光滑表面, 其浸润行为可以采用杨氏接触角θ进行表示, 该角度与固液、气液、气固的界面能有关, 其计算公式如下:

对于本文的测试结果, 可以发现微结构表面接触均大于光滑表面, 使得亲水的光滑表面变为疏水状态, 即微结构表面应为Cassie润湿状态. 液滴在微结构表面的润湿过程中, 沿着微沟槽方向的固体面积占比已知, 根据(3)式可以计算得到微沟槽表面的表观接触角, 结果见图6, 可以看出Cassie模型计算得到的结果与实验测试得到平行接触角θ//基本一致. 因此当肋板宽度R增加时, 固液接触面积增加, 液滴越容易浸润, 平行方向接触角θ//降低; 当凹槽宽度G增加时, 气液接触面积增加, 液滴越不易浸润, 因此平行方向接触角θ//增加.
而对于垂直接触角而言, 由于微凹槽边缘存在的钉扎效应使其具有较大接触角, 且该角度随着微凹槽宽度G和肋板宽度R变化基本保持不变. 垂直于凹槽方向液滴的运动由于被离散的凹槽所阻断, 液滴跨越相邻肋板的运动阻力或能量壁垒较大, 因而铺展浸润性能较差, 因此具有较大的接触角. 进一步实验显微观测了随体积增加液滴在微结构表面的润湿过程, 结果如图8所示. 图8显示为液滴刚润湿到第10个肋板的状态, 随着液滴体积的增加, 由于微肋板边缘的钉扎效应, 液滴的垂直方向接触角不断增加, 但固-液-气三相接触线保持不变, 如图8(c)所示, 当液滴逐渐靠近下一个肋板9#时, 由于液滴重力以及固-液间引力作用, 液滴会快速跳跃与肋板9#边缘接触, 如图8(d)所示, 并快速润湿肋板9#表面, 如图8(e)所示, 此时由于液滴水平截面面积变大, 接触角进而变小. 由此发现, 液滴在垂直方向的润湿过程就是三相线一系列的钉扎和跳跃过程, 同时接触角也呈现出振荡变化过程, 如图8(f)和图8(g)所示, 其中虚线代表液滴跨越微结构过程中轮廓.
 图 8 9#微结构表面液滴前进过程的实验结果(a)?(e)及示意图(f)和(g)
图 8 9#微结构表面液滴前进过程的实验结果(a)?(e)及示意图(f)和(g)Figure8. Experimental results (a)?(e) and schematic diagrams (f) and (g) of droplet moving processes on 9# micro-rectangular groove surface.
理论和实验对比分析发现液滴在微结构表面为Cassie润湿状态, 因此固-液接触面积越大, 液滴沿沟槽方向越容易浸润, 其平行接触角θ//越小, 当气-液接触面积越大, 液滴沿沟槽方向越不易浸润, 其平行接触角θ//越大, 进而有平行接触角θ//随着固体面积比增加而降低. 而垂直方向液滴的运动由于被凹槽阻断, 其运动的能量壁垒较大存在钉扎效应, 因此其铺展润湿性能较差, 且液滴沿垂直方向的运动为三相线一系列的钉扎和跳跃现象. 同时各向异性液滴变形比L/W与两特征方向接触角比值θ⊥/θ//成正比, 即接触角与液滴浸润方向的运动阻力密切相关.
