摘要: 针对具有明显速度梯度的非均匀流场速度分布在线测试难题, 提出了基于多角度投影的激光吸收光谱多普勒速度分布测试方法, 利用多角度投影吸收光谱信息低频能量相对变化对两段式速度分布区间长度与对应速度值进行耦合求解. 建立不同投影角度下吸收光谱平均频偏值与不同速度区间频偏差值之间的函数关系, 提出了基于傅里叶变换的光谱信号低频能量变化分析方法, 解决了不同速度梯度条件下光谱信号微弱变化检测难题. 采用7185.6 cm
–1 波段H
2 O特征谱线结合三条投影光路实现了对于两段式速度分布模型的快速重建, 研究了投影角度以及不同幅值噪音对速度分布计算的影响. 分析表明该方法对于具有明显速度梯度的流场中高速区速度值重建结果最佳, 相对误差0.9%, 同时测量噪音对高速区速度值重建结果影响最小. 投影角度增大有利于增强重建方程中不同速度区间光谱频偏差值对速度区间长度比值的灵敏度, 提高测量精度. 考虑到系统测量空间分辨率限制, 0°, 30°, 60°是较为理想的光路分布角度. 研究结果对于推动激光吸收光谱技术在发动机诊断及气体动力学研究中的应用具有重要意义.
关键词: 激光吸收光谱 /
多普勒效应 /
傅里叶变换 /
速度分布 English Abstract Two-stage velocity distribution measurement from multiple projections by tunable diode laser absorption spectrum Wang Chuan-Wei Li Ning Huang Xiao-Long Weng Chun-Sheng National Key Laboratory of Transient Physics, Nanjing University of Science and Technology, Nanjing 210094, China Fund Project: Project supported by the National Natural Science Foundation of China (Grant Nos. 11372141, 11472138), the Fundamental Research Funds for the Central Universities (Grant No. 30919011258), and the Natural Science Foundation of Jiangsu Province, China (Grant No. BK20190439)Received Date: 12 August 2019Accepted Date: 15 October 2019Available Online: 28 November 2019Published Online: 01 December 2019Abstract: A novel approach to using tunable diode laser absorption spectrum (TDLAS) is developed for nonuniform velocity distribution measurement by Doppler effect. An analysis of the energy in direct absorption spectrum at low frequencies is made by Fourier transform, because the TDLAS method offers the advantages in using Beer law to deal with coupling relations between velocity distribution and corresponding length of velocity region. By comparing with traditional TDLAS-Doppler velocity measurement, advantages of this approach to the more exact solution of core flow velocity by signal process without using extra lasers and detectors are explored. Following the published theory, between velocity regions at multiple projections the absorbance about average in frequency offsets and the absorbance about difference in frequency offsets are incorporated into an improved fitting model. A solution to obtaining changes of absorbance energy at low frequencies by Fourier transform is used to demonstrate the ability to recover minor change in absorbance under different conditions, inferring a better method to realize the simultaneous measurement of velocity distribution. The influences of these parameters, such as projection angles and noise during absorption, are investigated by the multiple projection simulations at rovibrational transitions of H2 O near 7185.6 cm–1 from three projections. This approach is validated in a two-stage velocity distribution model, demonstrating the ability to exactly measure core flow, with a precision of 0.9% RMS (root mean square). The high velocity in the core flow is less influenced by the random noise in absorption due to nearly linear relationship between the difference in frequency offsets and the ratio of length of velocity region. Some satisfied results can be obtained when larger angles of projection are arranged. The combination of 0°, 30°, and 60° will be a reasonable optic design considering the limitation of spatial resolution. In conclusion, the novel approach to velocity distribution measurement based on TDLAS-Doppler from multiple projections has great potential applications in engine diagnosis and gas dynamic research.Keywords: tunable diode laser absorption spectroscopy /Doppler effect /Fourier transform /velocity distribution 全文HTML --> --> --> 1.引 言 气流流速是空气动力学研究的基础参数之一. 实现流场速度的准确测量不但对于飞行器验证试验等具有重要意义, 同时高速燃气速度测试也是发动机研制和性能提升的关键. 作为一种灵敏度高、响应速度快、可靠性和环境适应性强的非接触式气体测试技术, 在过去的几十年间可调谐半导体激光吸收光谱(TDLAS)已经成功地应用于燃气温度、组分浓度、速度等参数同步在线测量, 并且通过与CT技术相结合可实现燃气多参数二维重建, 在爆轰发动机、冲压发动机等新一代超音速发动机研制与关键参数测试中发挥重要作用[1 -8 ] .2 O吸收谱线为监测对象, 在此基础上利用双光路投影设计与多普勒频偏计算方法可以得到实时流场速度值. 例如阚瑞峰等对激光吸收光谱多普勒测速技术进行了综述[9 ] , 并开展了针对高速风洞的流速测试研究[10 ] . 利用7242.37 cm–1 H2 O特征吸收谱线针对直径60 cm实验风洞进行试验, 内部气流马赫数6.5, 总温1700 K, 总压7.2 MPa, 实现了对2050 m/s流速的测量[11 ] . 姚路等[12 ] 利用7185.6 cm–1 H2 O特征吸收谱对火箭撬固体推进剂装药燃烧羽流流速进行测量, 实现了对1100 m/s流速的测量.[13 ,14 ] 研究了超然冲压发动机高速流动环境下低速边界层对核心区速度测量的影响, 发现尽管边界层的存在将导致二次谐波(2f )波形发生扭曲, 但该方式有利于减少速度边界层对于核心区测量结果的影响. Chang等[15 ,16 ] 分析了边界层对于二次谐波信号的影响并提出了针对2f /1f 信号的修正方法, 实现了1630 m/s流场速度的在线测量.[17 ] 和Qu等[18 ,19 ] 提出了基于吸收光谱线型变化的分析方法, 针对多普勒频偏效应下的吸收线型信息进行计算进而得到流场速度分布, 这是另一条速度分布重建探索途径. 2)对于气体速度测试而言其多普勒频移量为10–2 —10–3 cm–1 (低速情况下多普勒频移量仅为10–4 cm–1 量级), 因此要求测试系统具有较高的光谱分辨率. 3)由于低速区与高速区的多普勒频偏量差值小, 因此如何从投影光路光谱信息分析出低速区与高速区的相关信息是一个难题.2.基于TDLAS技术的速度测试原理型 22.1.基于多普勒效应和TDLAS技术的速度测试原理 2.1.基于多普勒效应和TDLAS技术的速度测试原理 TDLAS技术以分子吸收光谱理论为基础, 当一束频率为ν 、强度为I 0 的激光穿过均匀流场时, 入射光强I 0 与透射光强I t 满足Beer-Lambert定律:P 为待测气体压强; X 为吸收气体的组分浓度; S (T )为气体特征谱线在温度为T 时的吸收强度, 对于特定气体分子吸收谱线, 其谱线强度仅是温度的函数; L 为激光在待测气体介质中的光程; ? (ν )是归一化特征谱线线型函数, 表征光谱吸收率随波数ν 的相对变化. 对于非均匀分布光路, 其光谱吸收率可以采用离散化方式表示为[20 ] , 流速与多普勒频移满足如下关系式:θ 是气体流动方向与激光传输方向的夹角, ${\nu_0}$ 是未经过待测气体吸收时的谱线中心频率. 对于均匀流动的气体速度测量, 可采用交叉双光路布置方式, 如图1 所示. 源于同一激光器的两束激光分别以不同入射角通过气流, 利用二者之间的多普勒频移, 可由下式计算出气流速度:图 1 基于多普勒效应的激光吸收光谱测速原理 (a)激光吸收光谱多普勒测速系统示意图; (b)吸收光谱信号多普勒频偏示意图Figure1. TDLAS-based Doppler velocimetry: (a) Diagram of velocity measurement system; (b) diagram of frequency shifts between absorption signals.ν 12 是两束激光穿过待测气流后的频率差值.2.2.两段式速度分布流场计算方法 -->2.2.两段式速度分布流场计算方法 对于均匀流场速度分布的测试, 多普勒频移量正比于气体流速. 当流场速度分布不均匀时, 激光在低速区和高速区的频移量不同, 测量得到的吸收光谱信号实际是由不同频移量、不同吸收强度的吸收光谱信号的叠加而成, 叠加后的光谱宽度增加, 呈现非对称性, 采用单谱线拟合将导致较大误差, 因此无法采用(4 )式直接计算非均匀流场速度分布.图2 所示. 流场两端为流场的低速区, 速度为V l , 长度为d l ; 中间为高速区, 速度为V h , 长度为d h . 流场模型中温度压力气体组分等参数均匀分布, 气体沿x 轴方向流动. 信号发生器发出高频锯齿波扫描信号, 加载至温度电流控制器内, 驱动可调谐半导体激光器波长对特征吸收谱线进行快速扫描. 输出激光信号由光纤连接至测试现场, 由分光器分为3路、光路1和光路2为两条测试光路, 光路方向与气流速度法线的夹角分别为${\theta _1}$ 和${\theta _2}$ ; 光路3为参考光路, 光路方向与气流速度垂直, 提供后续计算时的基准信号. 透射过流场后的激光信号由光电探测器接收, 通过数据采集系统记录并进行后续分析.图 2 两段式速度分布模型与多光路测试系统示意图 (a)速度分布流场模型示意图; (b)激光吸收光谱速度分布测试系统示意图Figure2. Model and multiple projection system design for two-stage velocity distribution: (a) Velocity distributions assumed in the analysis; (b) illustration of optical system for TDLAS velocity distribution measurement.$\Delta \nu$ 概念, 代表吸收光谱经过高速区和低速区后总体频偏量:A l 是低速区气体的光谱信号的光谱吸收率积分值; $\Delta {\nu_{\rm{l}}}$ 是低速区气体流动引起的频率偏移; A h 是高速区气体吸收光谱信号的光谱吸收率积分值; $\Delta {\nu_{\rm{h}}}$ 是高速区气体流动引起的频率偏移.$\Delta \nu$ . 本文提出对叠加后光谱信号进行傅里叶变换, 与参考光路中吸收信号进行傅里叶变换并对比, 通过分析其相位差值计算得到平均频偏量$\Delta \nu$ . 将(4 )式代入(5 )式可得θ 不同, 但A h /A l 相同, 均等于高速区长度与低速区长度比值, 即$ d_{\rm h}/(2d_{\rm l}) .$ 定义$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 为光路入射角θ 时高速区气体吸收光谱信号相对于低速区气体吸收光谱信号的频率偏移差值:$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ . 对于不同角度光路上测量得到的光谱吸收率信号, 影响其光谱信号轮廓的因素不仅包括各个速度区间长度, 还包括不同速度区间之间的速度差值. 本文提出采用参考光路信号对不同角度下的光谱信号幅值进行归一化处理, 将归一化后不同角度下光谱信号幅值作为衡量光谱信号轮廓变化值Eθ . 理论上可以通过多种建模方法进行归一化处理, 考虑到光谱信号属于脉冲信号, 进行傅里叶变换后可以得到一窄带宽频谱信号, 该频谱低频部分对于光谱吸收信号轮廓是非常敏感的. 因此, 本文采用不同角度下光谱吸收信号傅里叶变换后的低频部分积分值比值, 作为衡量光谱信号轮廓变化的变量Eθ :${I_\theta }(t)$ 是入射角度为θ 时测量光路光谱吸收信号, ${I_\theta }_{{\rm{ref}}}(t)$ 为参考光路的光谱吸收信号. 对于非均匀流场测量而言, 光谱信号轮廓变化受测量光路投影角度、流场分布等参数影响. 考虑到光谱时域信号为脉冲信号, 因此其傅里叶变换后为具有一定带宽的低频宽谱信号. 该低频宽谱信号仅仅对光谱信号轮廓变化敏感, 而对噪音等高频信号具有很好的过滤功能. 通过对不同测量光路获取的低频宽谱信号进行积分, 获取低频段能量差异, 可以很好地描述非均匀流场中光谱信号轮廓变化情况, 进而反演出流场分布情况. (9 )式通过将测量光路与参考光路中低频宽谱信号能量值进行对比, 进一步消除两段式速度分布流场在不同投影角度测量光路光谱信号中低速区与高速区长度比值的差异. 分析经过不同速度区间叠加后的光谱信号特征可知, Eθ 与速度区间长度比值A h /A l 以及不同速度区间光谱信号频率频移差值$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 相关:9 )和(10 )式速度模型建立Eθ 与A h /A l 和$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 之间函数关系, 分析得到各种不同工况下Eθ 变化规律, 如图3 所示. 结合(8 )式可以推算出速度区间长度比值A h /A l , 代入(6 )和(7 )式最终求解得到V l 和V h .图 3 Eθ 与A h /A l 和$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 的函数关系图Figure3. Function diagram of Eθ , A h /A l and $\Delta {\nu_{\rm{h} \text{-} l, \theta }}$ .3.结果与讨论 23.1.速度分布计算结果分析 3.1.速度分布计算结果分析 速度分布模型和探测光路布置方式如图2 所示, 两条光路入射角度${\theta _1}$ 和${\theta _2}$ 分别为30°和60°. 在流场气体温度为300 K、压力为101325 Pa、H2 O气体摩尔浓度为0.01条件下, 选用7185.6 cm–1 H2 O特征谱线, 对两段式速度分布模型进行重建研究. V h 为1000 m/s, V l 为300 m/s, 高速区与低速段长度分别为8 cm与2 cm, A h /A l 比值为4.$\Delta \nu$ 计算方法与(5 )式计算结果存在的误差. 针对图3 中的速度模型计算叠加后光谱信号, 通过利用傅里叶变换获取叠加后的光谱信号相位变化信息, 与(5 )式中直接计算结果进行对比, 结果如图4 所示.图 4 不同工况下平均频率偏移计算误差结果Figure4. Relative error of average frequency offset under different conditions.$ A_{\rm l}/A_{\rm h} $ 在0—1范围内, 随着速度差值的增加, 利用(5 )式计算的平均频偏量$\Delta \nu$ 与叠加后光谱傅里叶变换相位分析结果的相对误差逐渐增大. 对于给定速度差值工况下平均频偏量$\Delta \nu$ 相对误差最大值出现在A l /A h 为0.4附近, 表明当低速区面积不可忽略且叠加后光谱非对称性较大时平均频偏量$\Delta \nu$ 相对误差最大. 但理论计算表明平均频偏量与叠加后光谱傅里叶变换相位分析结果误差小于0.00051%, 表明采用(5 )式计算平均频偏量$\Delta \nu$ 是准确可行的.图5 为60°光路投影条件下${E_\theta }$ 值所对应的A h /A l 和$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 之间函数关系以及一阶导数关系.图 5 60°光路投影条件下$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 与A h /A l 的关系 (a) $\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 随A h /A l 的变化; (b) $\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 一阶导数随A h /A l 的变化Figure5. Function relationship between $\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ and A h /A l at 60° optical path: (a) $\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ varies with A h /A l ; (b) 1 st derivative of $\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ varies with A h /A l .8 )式对30°和60°两条光路下相同 A h /A l 所对应的不同$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 进行对比, 计算得到的结果如图6 所示. 30°和60°两条光路下高速区V h 值分别为1009.48 m/s和336.87 m/s, 相对误差分别为0.9%和12.3%. 高速区长度为7.8 cm, 相对误差为2.5%. 总体而言, 计算结果高速区速度值与模型之间的相对误差更小. 如果采用传统TDLAS双光路测试方法进行计算, 利用(3 )式得到的气体流速为860.05 m/s, 可见针对于两段式速度分布流场, 本文方法可以大幅度提高测量准确性.图 6 模型与计算结果对比图Figure6. Comparison of model with calculation results.11 )和(12 )式进行对比可以发现, V l 计算过程中误差传递明显大于V h 值, 因此相同误差条件下高速区间速度计算结果更加精确. 另一方面, 如图5 所示, A h /A l 与$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 在一定范围内呈近似线性关系, 因此当A h /A l 明显大于1时, 利用A h /A l 与$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 两者比例关系求解V h 值时受噪音影响较小.3.2.速度分布计算光路投影角度分析 -->3.2.速度分布计算光路投影角度分析 选取几种典型的光路投影角度组合对图2 中的速度分布模型进行计算, 其他参数与3.1 节相同, 结果如表1 所列.投影角度 计算误差 θ 1 /(°)θ 2 /(°)L h /%V h /%V l /%10 20 16.23 7.07 18.92 10 40 15.84 6.88 18.71 10 60 15.84 6.84 18.78 10 80 15.84 6.81 18.84 20 40 15.21 6.58 18.15 20 60 8.74 3.71 12.08 20 80 4.75 2.01 7.35 30 60 2.52 1.07 4.16 30 80 1.74 0.73 2.96 40 60 1.37 0.58 2.36 40 80 1.01 0.42 1.77
表1 不同角度组合下的计算结果Table1. Calculation results under different angle combinations.${\theta _1}$ 和${\theta _2}$ 以及两者之间的差值有利于提高测试精度, 当激光入射角度较小时, 低速区速度值误差可达18.92%, 高低速区长度误差达到16.32%. 首先, 增大${\theta _1}$ 和${\theta _2}$ 后, 两条测试光路吸收光谱经过两段式速度分布流场叠加后与参考光路光谱相比所得的变量Eθ 值均大幅度越小. 图7 给出了不同Eθ 条件下所对应的A h /A l 与$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 之间函数关系. 可以看出Eθ 值越小则$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 对变量A h /A l 的敏感性越强, 从而可以抑制噪音对测量的影响, 进而提高重建精度.图 7 不同Eθ 条件下A h /A l 和$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 之间函数关系Figure7. Relationship between A h /A l and $\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ at different Eθ .Eθ 值条件下的方程(10 )相关性减弱, 进而有利于提高抗干扰能力.${\theta _1}$ 和${\theta _2}$ 可以提高$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 对A h /A l 变化敏感性, 使得高速区和低速区速度值以及相应区间长度重建误差快速降低, 但过大的角度意味着测试系统所需更长的测试距离, 使得该系统测量的空间分辨率下降. 因此, 测试系统光路布置需整合考虑, 30°和60°是较为理想的光路分布角度.3.3.速度分布模型对计算结果的影响 -->3.3.速度分布模型对计算结果的影响 为了研究不同速度分布模型对速度分布重建结果的影响, 分别选取几种不同的高速区和低速区速度值以及相应区间长度的参数组合, 其他参数如3.1 节所述. 结果如表2 所列.模型流场参数 计算结果相对误差 V h /m·s–1 V l /m·s–1 A h /A l V h /%V l /%L h /%1000 100 4 0.17 7.47 0.31 1000 100 1 4.74 53.32 14.44 800 300 4 1.60 20.14 4.08 800 300 1 9.56 37.01 17.53 600 300 4 4.32 62.07 19.41 600 300 1 15.15 77.73 36.63
表2 不同速度下的计算结果Table2. Calculation results at different velocity.V h 为1000 m/s、V l 为300 m/s的模型工况为例, 高速区速度计算误差小于5%, 但低速区速度误差可达53.32%, A h /A l 误差可达到14.44%.A h /A l 条件下高速区与低速区速度差值越大, 重建结果误差越小. 这主要是由于较大的速度差值使得叠加后的光谱轮廓发生更加明显的变化, 使得Eθ 值减小, 所对应的平均频偏量$\Delta {\nu_\theta }$ 和频率偏移差值$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 亦明显增大, 有利于对于谱线信息的分辨, 结果如图8 所示. 同时$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 对变量A h /A l 的敏感性越强, 从而可以提高重建精度.图 8 不同速度模型条件下投影光路光谱信号特征Figure8. Absorbance features at projection in different velocity models.A h /A l 减小, 频率偏移差值$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 变化不大, 但对应的平均频偏量$\Delta {\nu_\theta }$ 有所降低, 同时叠加后的光谱轮廓有所变化, Eθ 值略有减小. 但当A h /A l 降低至2以下时, $\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 对A h /A l 变化敏感性迅速下降, 噪音对测量结果影响增加.3.4.噪音对计算结果的影响 -->3.4.噪音对计算结果的影响 通过对各个光路中添加不同幅值的噪音信号, 分析噪音对速度分布重建结果的影响, 如图9 所示. 模型参数如第3.1 节所述, V h 为1000 m/s, V l 为300 m/s, 高速区与低速段长度分别为8 cm与2 cm, A h /A l 比值为4.图 9 噪音对速度分布测量的影响Figure9. Effect of noise on velocity distribution measurement.V h 受噪音影响最小. 在精确测量时(噪音小于1%), V h 相对误差不超过3%; 在幅值5%噪音干扰下, V h 相对误差仍可控制在10%之内. 但V l 受噪音干扰明显, 在幅值1%噪音干扰下, V l 测量结果为175.69 m/s, 相对误差达到了41.4%. 高速区长度计算结果对于误差也较为敏感, 在幅值1%噪音干扰下高速区L h 测量结果为8.6 cm, 相对误差达到了6%, 但在幅值5%噪音干扰下相对误差达到了50%.A h /A l 明显大于1时, A h /A l 与$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 呈近似线性关系, 因此即使A h /A l 在计算过程中受噪音影响产生变化, 但对于V h 值影响有限. 但对于V l 的计算而言, 其受$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 值影响较大, 因此对于测量噪音更加敏感. 因此, 该方法对于高速区速度计算结果更加精确.10 )式中函数关系进行求解的, 提升Eθ 对于速度区间长度比值A h /A l 以及不同速度区间光谱信号频率频移差值$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 的敏感性可以降低不同速度区间长度计算结果误差, 因此后续建立更为合理函数关系式(10 )是解决问题的关键.4.结 论 为实现两段式速度分布流场的速度测量与分析, 提出了基于多角度投影的激光吸收光谱多普勒速度分布测试方法. 建立了不同投影角度下吸收光谱平均频偏值与不同速度区间频偏差值之间的函数关系, 提出了基于傅里叶变换的光谱信号低频能量变化分析方法, 有效降低了测试信号对噪音的敏感性, 提高了测试方法的准确性, 解决了不同速度梯度条件下吸收光谱信号微弱变化检测难题. 利用多角度投影吸收光谱信息低频能量相对变化对两段式速度区间长度与对应速度值进行耦合求解. 结果表明, 该方法对于具有明显速度梯度的流场中高速区速度值重建结果最佳, 相对误差0.9%. 投影角度增大有利于增强重建方程中不同速度区间光谱频偏差值对速度区间长度比值的灵敏度, 提高测量精度. 考虑到系统测量空间分辨率限制, 0°, 30°和60°是较为理想的光路分布角度. 测量噪音对高速区速度值重建结果影响最小, 提升Eθ 对于速度区间长度比值A h /A l 以及不同速度区间光谱信号频率频移差值$\Delta {\nu_{{{\rm{h}} \text{-}{\rm{l}}}, \theta }}$ 的敏感性可以有效降低噪音对不同速度区间长度重建结果的影响. 研究结果对于推动激光吸收光谱技术在发动机诊断及气体动力学研究中的应用具有重要意义. 
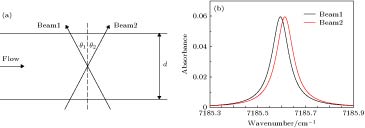 图 1 基于多普勒效应的激光吸收光谱测速原理 (a)激光吸收光谱多普勒测速系统示意图; (b)吸收光谱信号多普勒频偏示意图
图 1 基于多普勒效应的激光吸收光谱测速原理 (a)激光吸收光谱多普勒测速系统示意图; (b)吸收光谱信号多普勒频偏示意图

 图 2 两段式速度分布模型与多光路测试系统示意图 (a)速度分布流场模型示意图; (b)激光吸收光谱速度分布测试系统示意图
图 2 两段式速度分布模型与多光路测试系统示意图 (a)速度分布流场模型示意图; (b)激光吸收光谱速度分布测试系统示意图











 图 3 Eθ与Ah/Al和
图 3 Eθ与Ah/Al和




 图 4 不同工况下平均频率偏移计算误差结果
图 4 不同工况下平均频率偏移计算误差结果






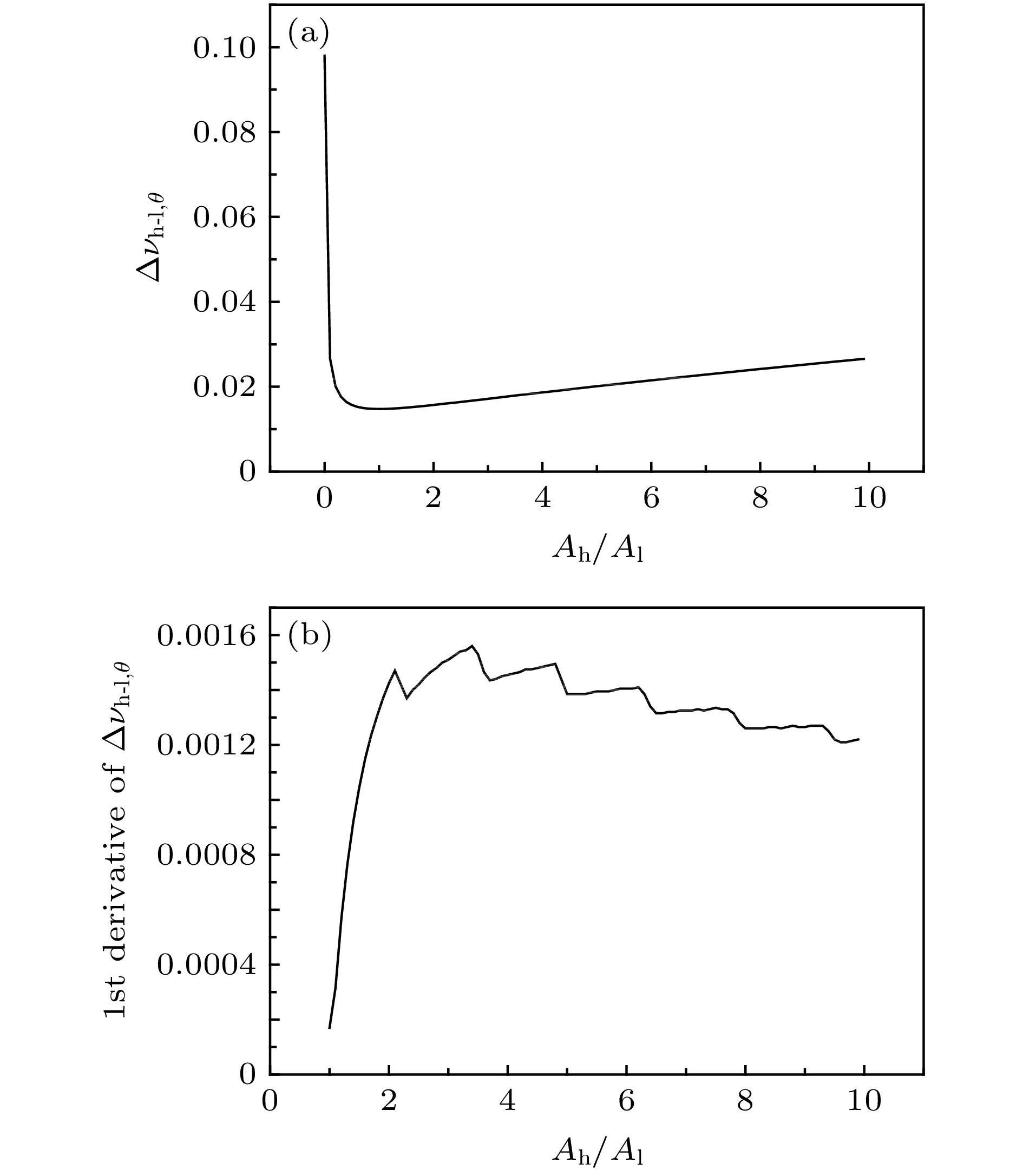 图 5 60°光路投影条件下
图 5 60°光路投影条件下






 图 6 模型与计算结果对比图
图 6 模型与计算结果对比图







 图 7 不同Eθ条件下Ah/Al和
图 7 不同Eθ条件下Ah/Al和







 图 8 不同速度模型条件下投影光路光谱信号特征
图 8 不同速度模型条件下投影光路光谱信号特征


 图 9 噪音对速度分布测量的影响
图 9 噪音对速度分布测量的影响



