1.Key Laboratory of Spectral Imaging Technology, Xi’an Institute of Optics and Precision Mechanics, CAS, Xi’an 710119, China 2.University of Chinese Academy of Sciences, Beijing 100049, China
Fund Project:Project supported by the National Natural Science Foundation of China (Grant No. 41005019), the Fund for Young Scientists from West China, Chinese Academy of Sciences (Grant No. XAB 2016A07), and the陕西省自然科学基础研究计划(Grant No. 2019JQ-931)
Received Date:02 August 2019
Accepted Date:30 September 2019
Available Online:05 December 2019
Published Online:05 January 2020
Abstract:Passive atmospheric wind detection technique retrieves atmospheric wind profile by measuring the Doppler shift of airglow emissions. Doppler asymmetric spatial heterodyne spectrometer (DASH), which is a Fourier transform spectrometer(FTS), retrieves the Doppler shift information of airglow emissions by detecting the phase shift of interferograms, and the measured phase accuracy directly affects the retrieved wind speed precision. The signal-to-noise (SNR) ratio is one of the significant indexes for evaluating the performance of wind-measuring interferometers in engineering applications. Studying the quantitative relationship between retrieved phase uncertainty and original interferogram SNR that is based on observations is quite essential for the DASH design, performance evaluation and wind profile applications. In this paper, the study is based on the noise propagation theory in FTS and DASH phase retrieval model. According to the Fourier transform relationship between time and frequency domain, we start from original interferogram expression, then we conduct the Fourier transforming, single frequency extracting, inverse Fourier transforming, phase calculating and first-order Taylor expanding, and finally we establish a theoretical relationship model between original interferogram SNR and retrieved phase uncertainty. In order to verify the theoretical relationship model, firstly, we generate 20 groups of interferograms (each group with 1000 frames) randomly with varying the 30–250 times SNR value. After removing the low frequency baseline, we calculate the phase of each interferogram by DASH phase retrieval model, and obtain the phase uncertainty by calculating standard deviation of the 512th sampling of each group interferogram. Another phase retrieval uncertainty is obtained by using the theoretical relationship model between SNR and retrieved phase uncertainty derived from this paper. Secondly, a total of 23 groups of experimental interferograms (each group with 100 frames) with different intensities are collected through the self-developed DASH with a center wavelength of 632.8 nm, basic optical path difference of 50 mm, spectral resolution of 0.78 cm?1. Combining physical characteristics of shot noise and DASH parameters, interferogram SNR of each frame is calculated. We calculate phase uncertainty of experimental data through the two methods mentioned above. The results from the two different calculation methods are compared with each other to determine whether the conclusion is correct. In order to improve the accuracy of phase calculation, three lines are averaged as input to reduce the random error. The average residual between the two methods is only 0.03 mrad, the high consistency of the results indicates that the theoretical relationship model between SNR and retrieved phase uncertainty for DASH is correct. The phase uncertainty can be evaluated by interferogram SNR directly in engineering, which provides a theoretical basis for optimizing the interferometer design. Keywords:phase retrieval/ Doppler asymmetric spatial heterodyne spectrometer/ atmospheric wind measurement/ photon noise
实验中用两种方法分别采集多组不同信噪比干涉图数据, 第一种方法使用同一衰减片, 调整积分时间控制原始干涉图强度, 获得不同信噪比干涉图; 第二种方法使用相同的积分时间, 调整衰减片获得不同信噪比干涉图. 这样设计主要有以下两种原因: 首先, 验证理论模型对不同噪声类型是否具有普适性; 其次, 为了使得实测干涉图信噪比覆盖更广. 由文献[16,17]可知, 实测干涉图噪声主要包含光子噪声、暗电流噪声、读出噪声, 因此当改变积分时间时, 三种噪声均发生改变, 当调整衰减片强度时, 仅光子噪声发生改变. 使用第一种方法选择两组不同透过率的衰减片, 其中第一组衰减片, 积分时间起始为0.2 s, 间隔为0.2 s; 第二组衰减片, 积分时间起始为0.5 s, 间隔为0.5 s. 每组衰减片实验中各采集9组数据, 每组100帧. 由于实验中没有精确测量入射光强, 因此选择多帧平均方法计算实测干涉图信噪比: 将每组100帧干涉图平均得到平均干涉图, 每帧干涉图与其偏差作为每帧干涉图噪声, 进而计算干涉图信噪比. 在用相位反演模型和本文推导的理论模型计算之前, 对原始干涉图预处理(去除冲击噪声和暗电平). 与仿真计算方法相同, 首先用第2节中的方法计算每帧干涉图相位, 得出每组干涉图的相位不确定度, 整个计算方法与前文计算仿真数据的数据处理方法相同. 其次, 用本文推导的理论模型计算每帧干涉图的理论相位不确定度, 再对每组结果统计平均得到每组干涉图的相位不确定度. 图6分别为两组衰减片对应的不同信噪比干涉图用相位反演模型与本文推导的理论模型计算结果及残差. 图7为相同积分时间, 不同衰减片对应的实测数据计算结果及残差. 图 6 变积分时间实测数据计算结果及残差 (a)为相位反演模型与理论模型计算的相位不确定度; (b)为两种计算结果残差 Figure6. Experimental results of retrieved phase uncertainty and residual with same attenuation coefficient and different integration time: (a) Phase uncertainty of two models; (b) the differences between two results.
图 7 变衰减片实测数据计算结果及残差 (a)为相位反演模型与理论模型计算的相位不确定度; (b)为两种计算结果残差 Figure7. Experimental results of retrieved phase uncertainty and residual with different attenuation coefficients: (a) Phase uncertainty of two models; (b) the differences between two results
图6中实线圈, 第3组数据为积分时间0.2 s的干涉图, 平均信噪比为73.488倍, 反演模型计算的不确定度为1.2213 mrad, 理论模型计算结果为1.0552 mrad, 仿真生成干涉图信噪比为72.8292倍, 相位反演模型计算结果为1.0396 mrad, 理论模型计算结果为1.0075 mrad. 残差偏大的原因是由于实测干涉图相位漂移较大, 图8中黑色为第3组实测数据反演相位差, 红色为仿真数据相同信噪比反演相位差, 从图中可以明显看出, 实测数据反演相位差的方差大于仿真数据. 图 8 相同信噪比实测数据与仿真数据对比分析 Figure8. Comparison and analysis of measured and simulated data with the same SNR.


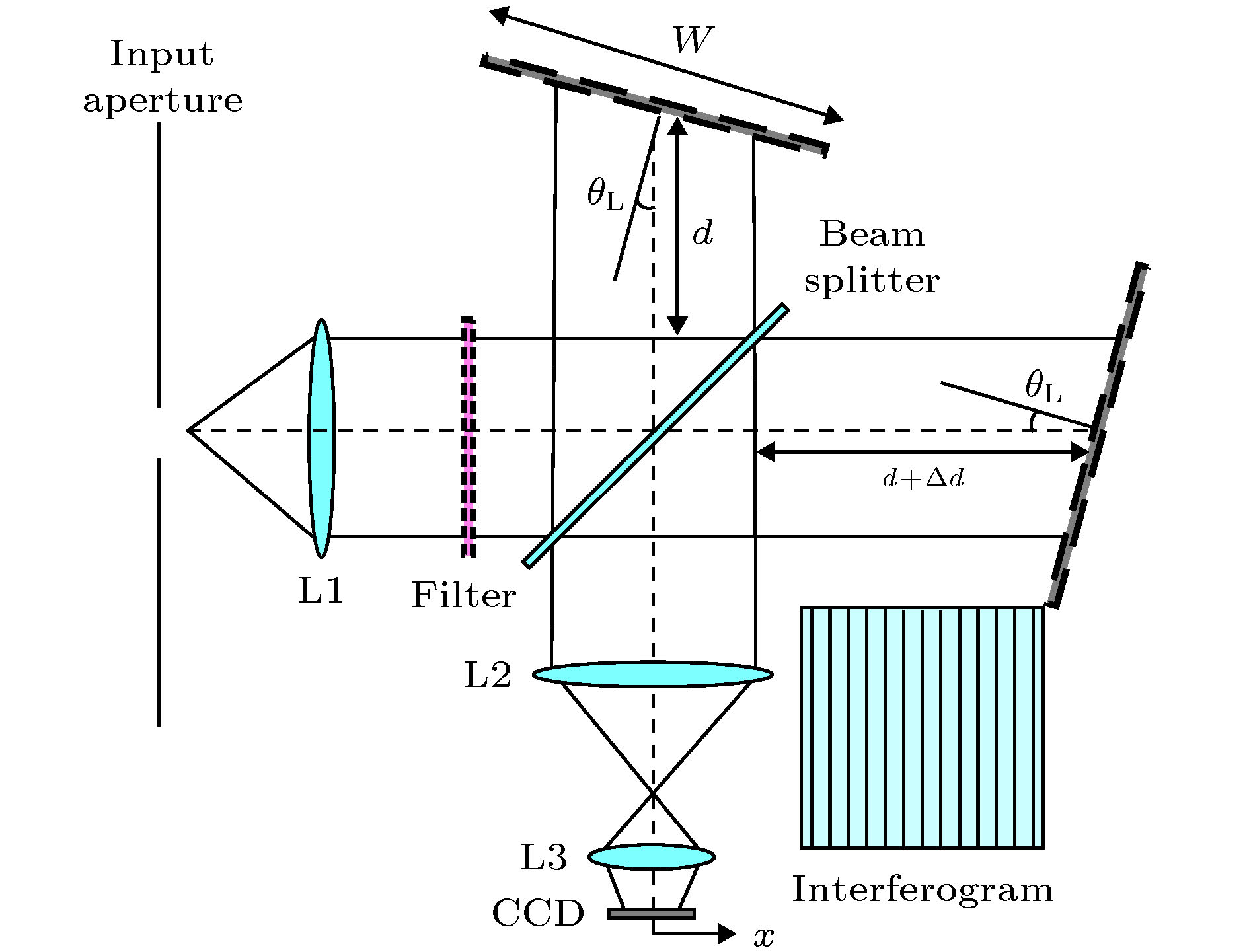 图 1 多普勒差分干涉仪原理图
图 1 多普勒差分干涉仪原理图




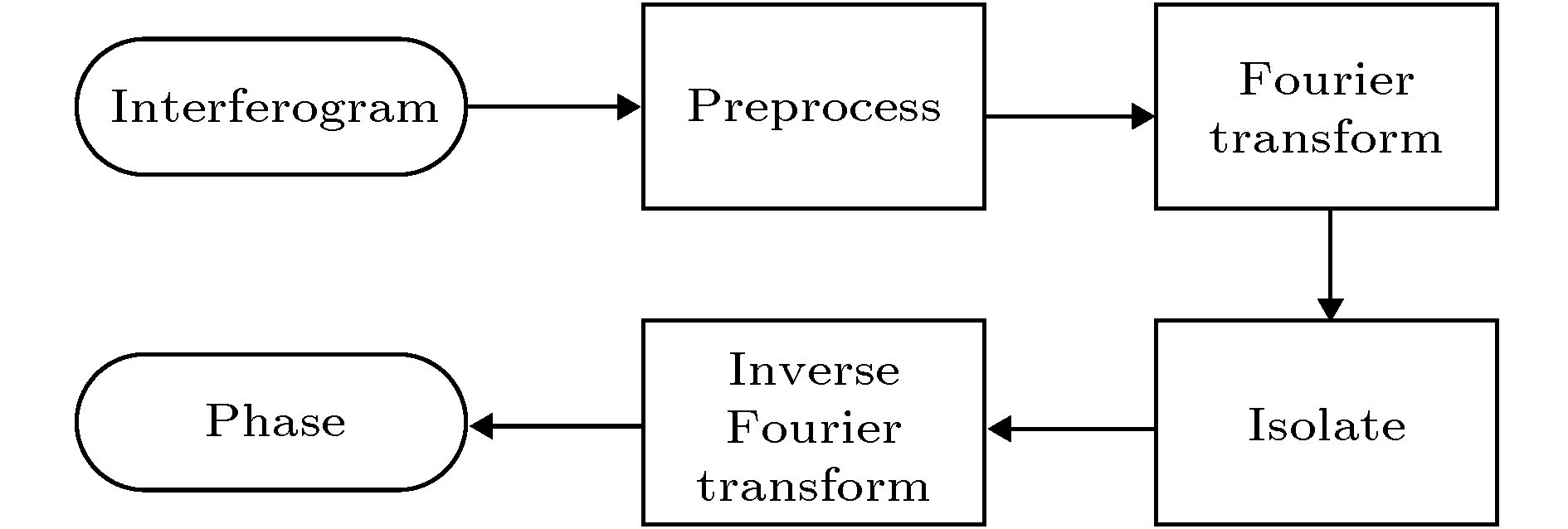 图 2 相位反演模型流程图
图 2 相位反演模型流程图































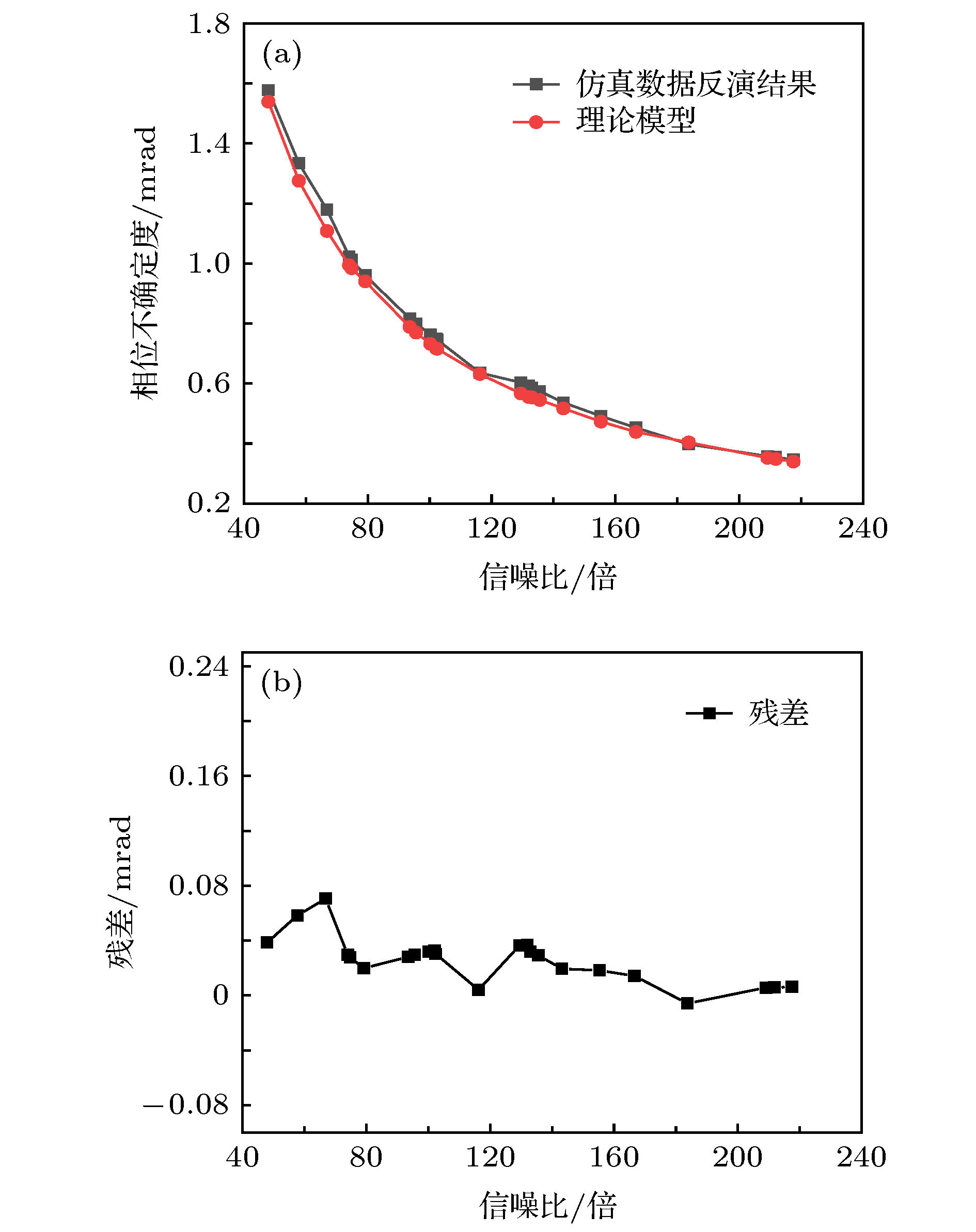 图 3 信噪比与相位不确定度仿真结果及残差 (a)为相位反演模型与理论模型计算的相位不确定度; (b)为两种计算结果残差
图 3 信噪比与相位不确定度仿真结果及残差 (a)为相位反演模型与理论模型计算的相位不确定度; (b)为两种计算结果残差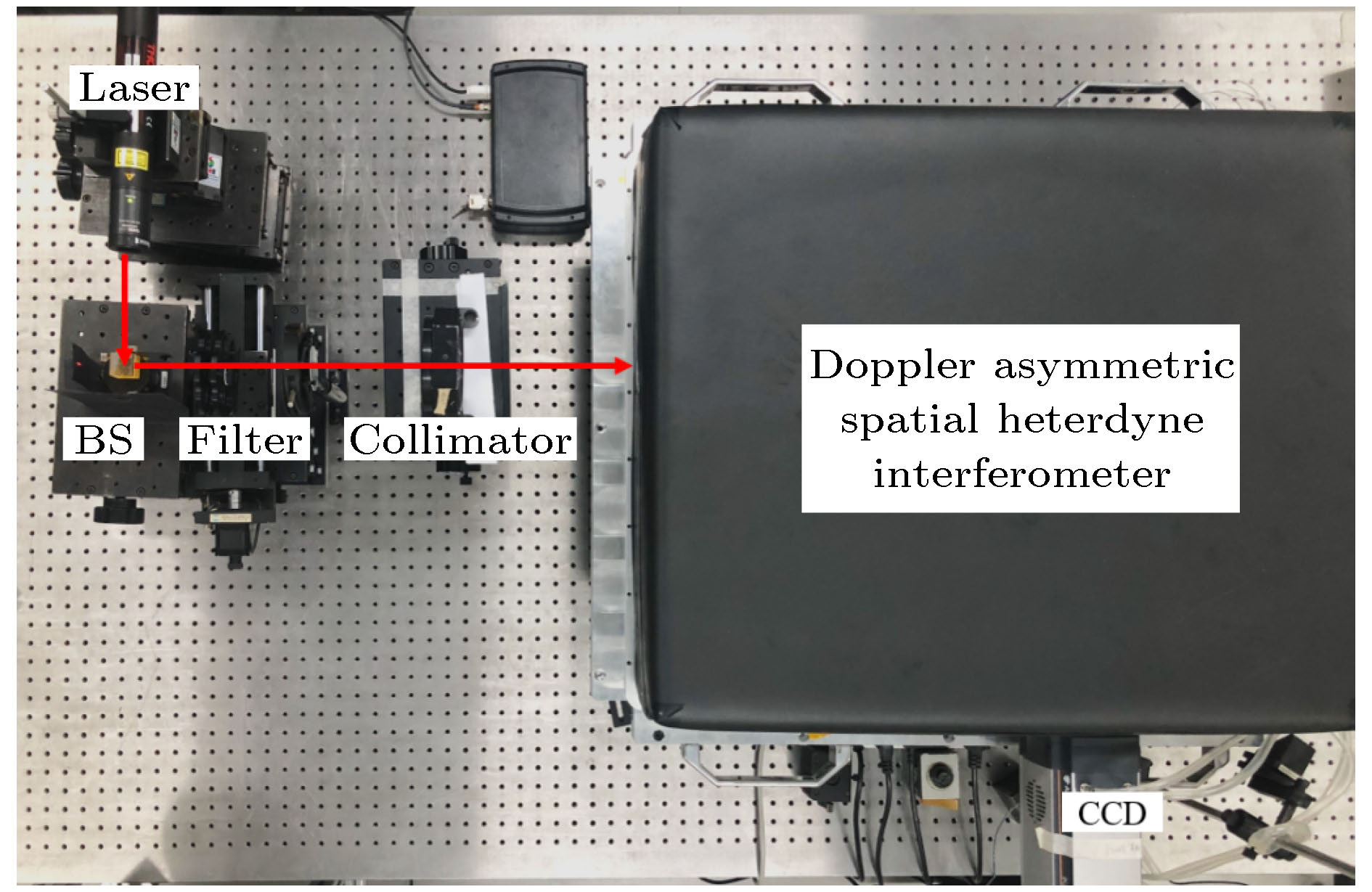 图 4 实验平台
图 4 实验平台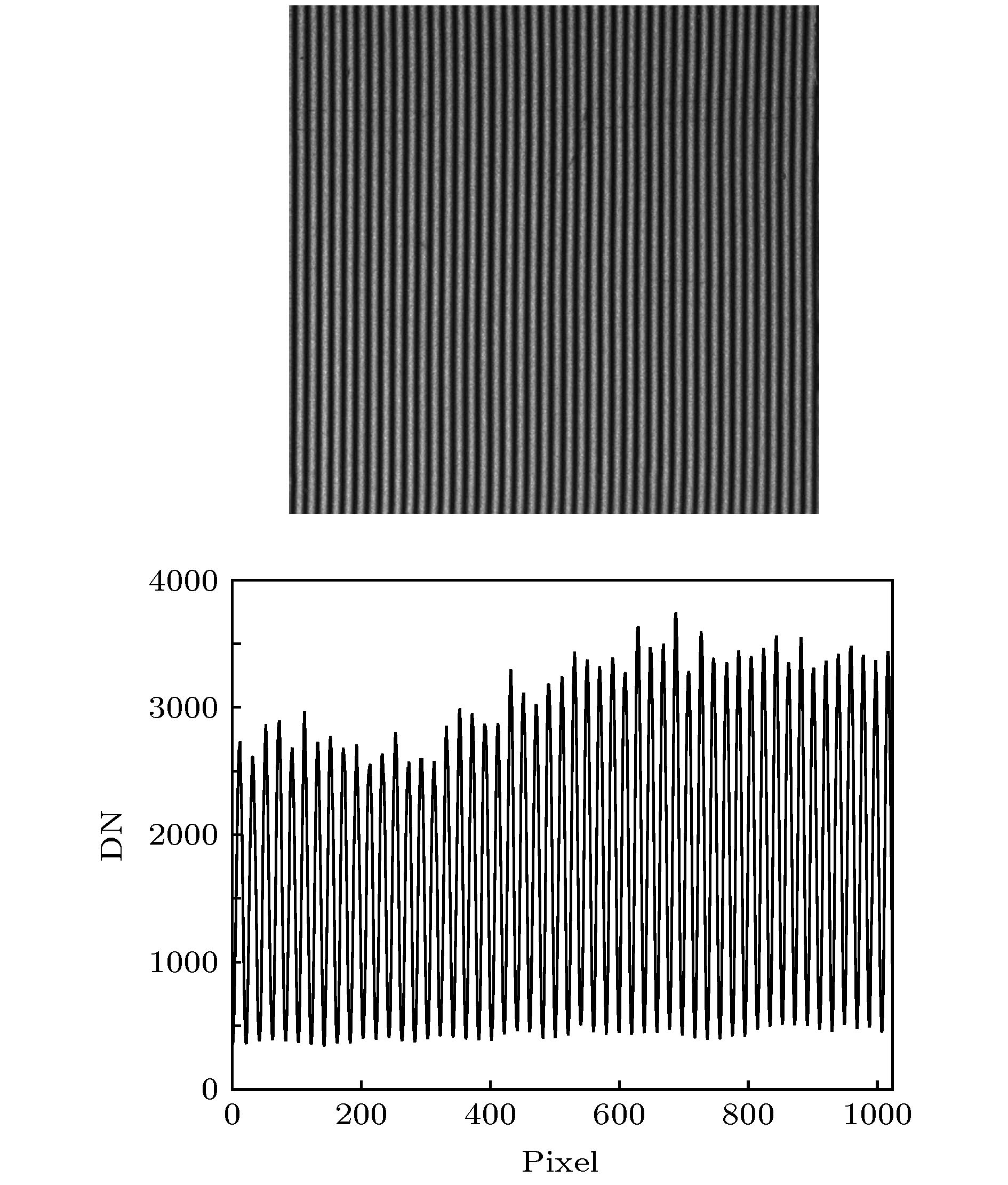 图 5 原始干涉图
图 5 原始干涉图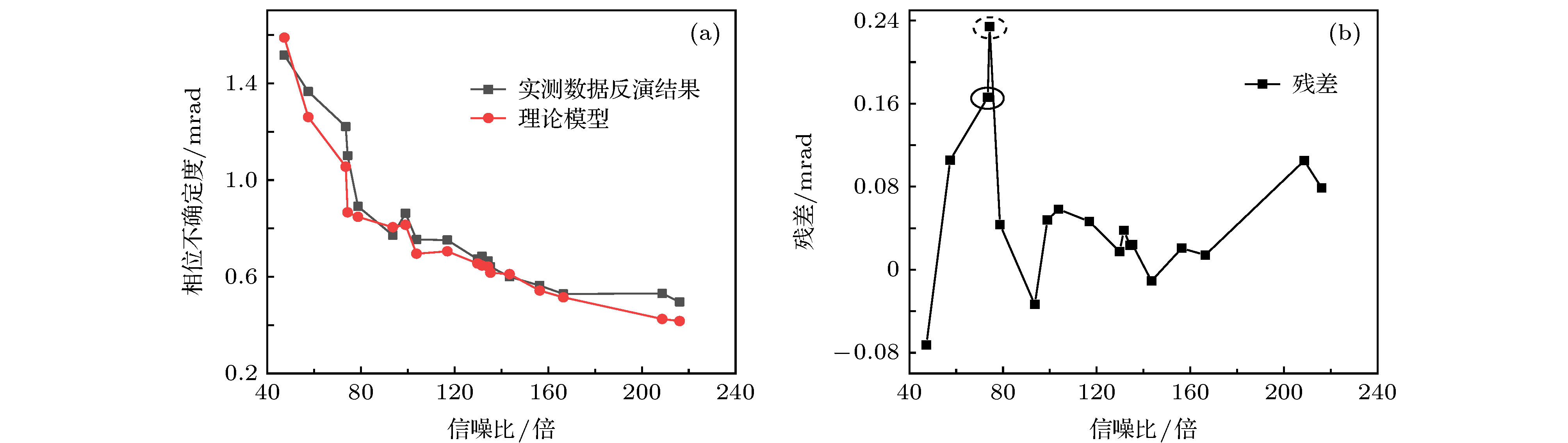 图 6 变积分时间实测数据计算结果及残差 (a)为相位反演模型与理论模型计算的相位不确定度; (b)为两种计算结果残差
图 6 变积分时间实测数据计算结果及残差 (a)为相位反演模型与理论模型计算的相位不确定度; (b)为两种计算结果残差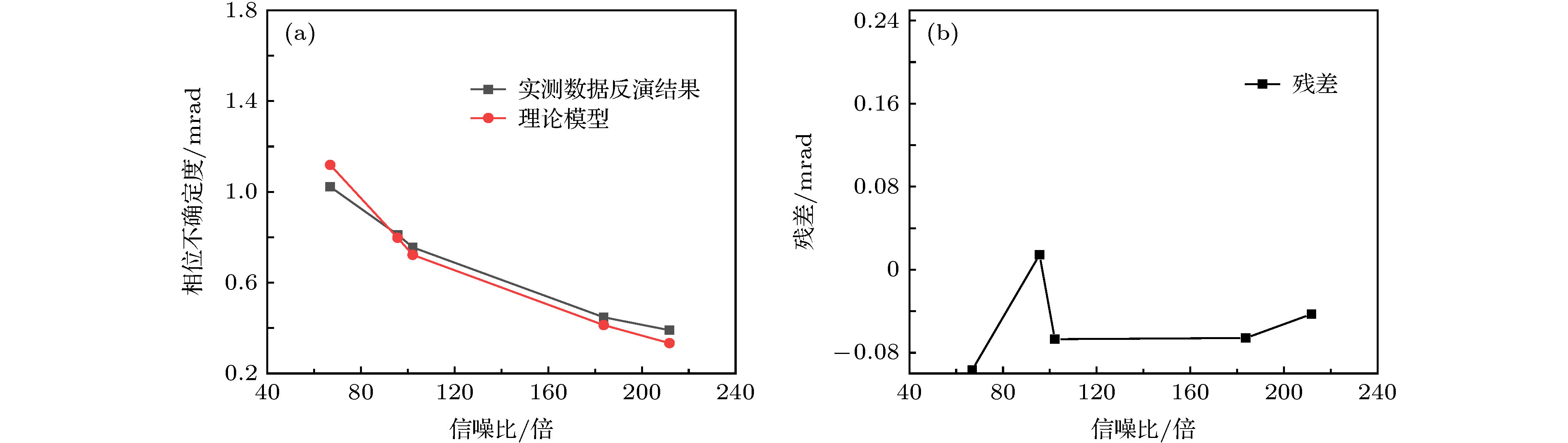 图 7 变衰减片实测数据计算结果及残差 (a)为相位反演模型与理论模型计算的相位不确定度; (b)为两种计算结果残差
图 7 变衰减片实测数据计算结果及残差 (a)为相位反演模型与理论模型计算的相位不确定度; (b)为两种计算结果残差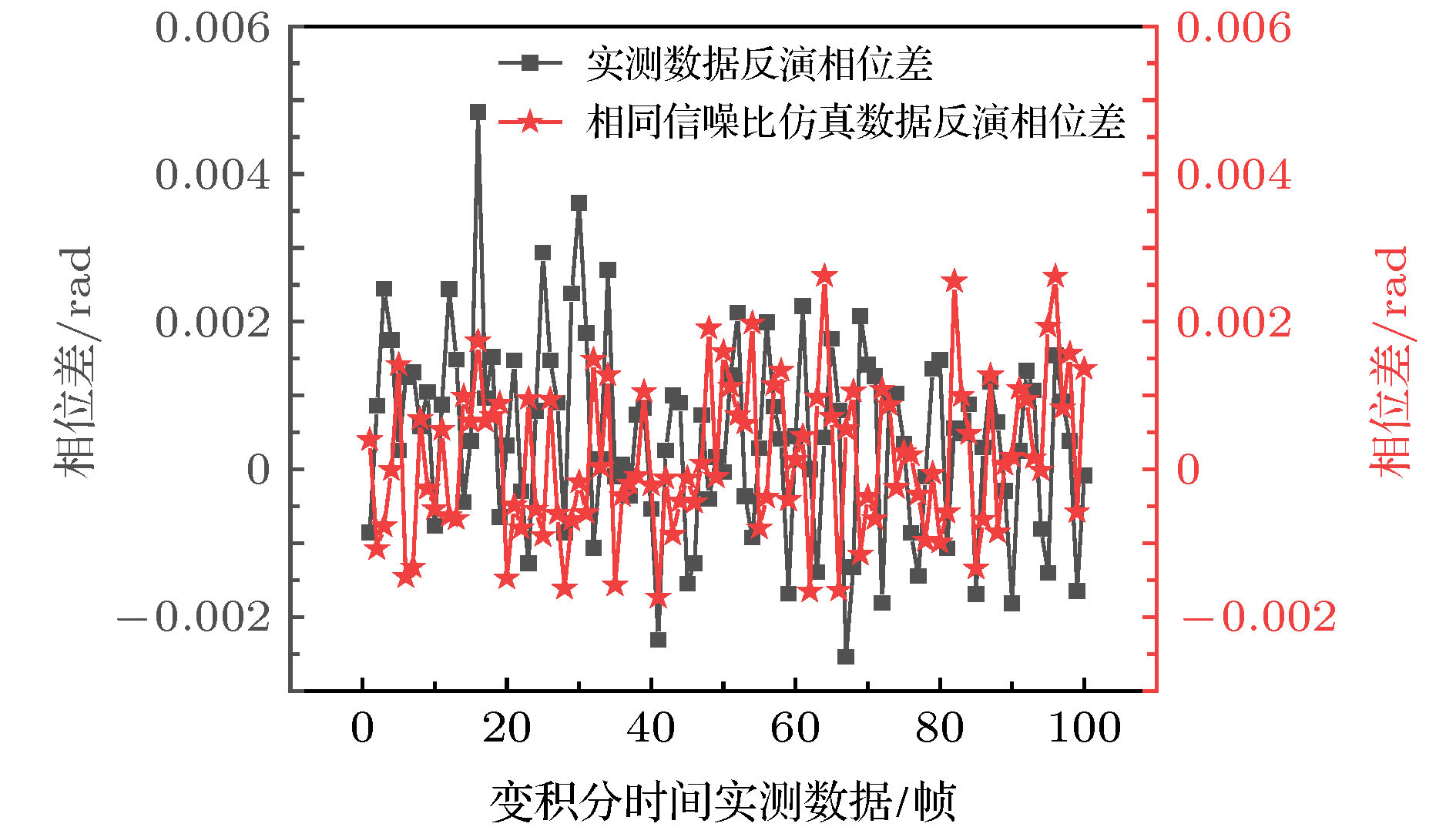 图 8 相同信噪比实测数据与仿真数据对比分析
图 8 相同信噪比实测数据与仿真数据对比分析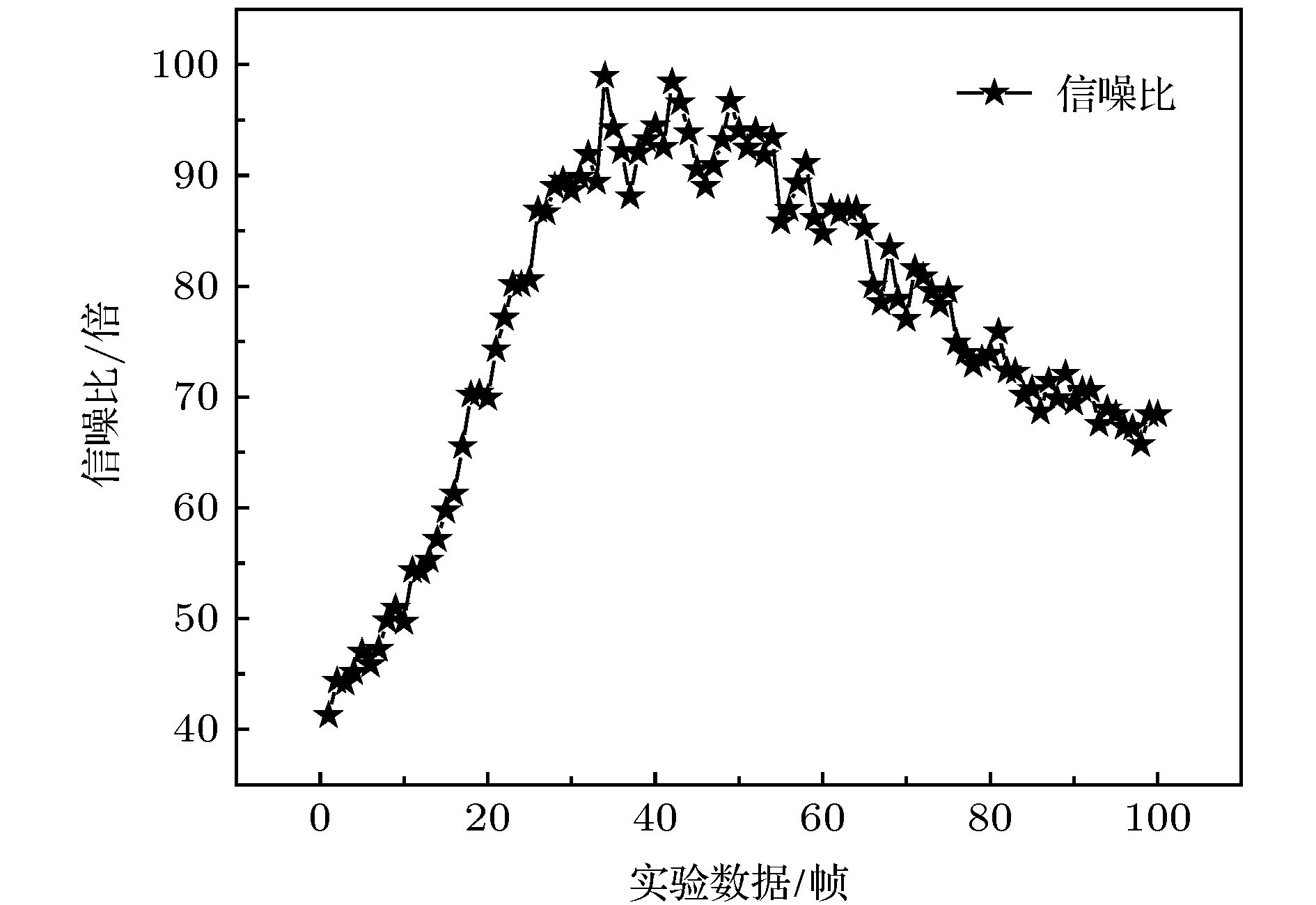 图 9 积分时间1.5 s实测干涉图信噪比
图 9 积分时间1.5 s实测干涉图信噪比