摘要: 采用微观离散模型研究信号交叉口的人-车相互干扰机理, 其中车辆运动描述基于细化NaSch模型并考虑了司机对交通灯信号切换的预期效应; 行人运动描述则基于多步格子气模型并考虑了过街绿灯周期内行人过街速度逐渐增加的特征. 机动车与行人之间相互干扰表现为交通灯信号切换时由于车辆(行人)滞留冲突区而造成行人(车辆)运动的延误. 通过数值模拟得到了车辆运动的基本图、行人等待时间以及相应的相图, 并给出行人(车辆)滞留冲突区内造成车辆(行人)延迟的定量特征. 模拟结果发现存在一个临界绿信比. 当绿信比小于临界值时, 随着密度的增大, 车流出现自由流相、饱和流相和拥堵流相; 而当绿信比大于临界值, 则出现自由流相、共存相、饱和流相和拥堵流相. 由人-车相互干扰所导致的延误与车流和行人流的运行状态密切相关. 当行人到达率和绿信比都比较大时, 等待区内的行人无法在行人绿灯周期内一次清空. 文中详细地讨论了人-车相互干扰的定性和定量特征. 发现通过合理设置绿信比, 可以在保证车流运行效率的同时, 减少行人过街的等待时间.
关键词: 元胞自动机 /
格子气模型 /
人-车相互干扰 /
延误 English Abstract Pedestrian-vehicle interference at a signalized crossing based on detailed microscopic traffic flow models Tao Yi-Zhou 1 ,Wei Yan-Fang 2 ,Gao Qing-Fei 3,4 ,Dong Li-Yun 3,4 1.College of Science, Shanghai Institute of Technology, Shanghai 201418, China Fund Project: Project supported by the National Natural Science Foundation of China (Grant Nos. 11572184, 11562020), the National Basic Research Program of China (Grant No. 2012CB725404), and the Shanghai Research Foundation of Shanghai Institute of Technology, China (Grant No. 39120K196008- A06)Received Date: 29 August 2019Accepted Date: 21 October 2019Available Online: 27 November 2019Published Online: 01 December 2019Abstract: Interference between pedestrians and motor vehicles at signalized intersections not only leads the traffic to delay and traffic efficiency to decrease, but also induces traffic crashes to happen frequently. In this paper, a microscopic discrete model for traffic flow is adopted to study the mutual interference mechanism between pedestrians and vehicles at signalized intersection. The vehicular traffic flow model is based on the refined NaSch model, and traffic lights are introduced to consider the driver anticipating in traffic signal switching. Based on the multi-step lattice gas model, the pedestrian flow model considers the fact that the pedestrians’ speed increases gradually during pedestrian cross-street green time. Both models reflect real features of movement of vehicles (pedestrians) in daily life. When the traffic light signal switches, the vehicles (pedestrians) staying in the conflict area result in the delay of pedestrians (vehicles). It is assumed that pedestrians and vehicles cannot coexist in the conflict area at the same time. In the simulation, the periodic boundary condition is applied to the lane, and the open boundary condition is applied to the crosswalk. The arrival rate of pedestrian is assumed to satisfy the Poisson distribution. Both the fundamental diagram of vehicular traffic flow and the pedestrian waiting time are calculated, and the phase diagram revealing the global nature of the presented model is obtained accordingly. The quantitative characteristics of vehicle (pedestrian) delay time caused by pedestrians (vehicles) staying in the conflict area are given as well. Simulation results show that there is a critical split. When the split is less than the critical value, three kinds of traffic phases, i.e., free flow phase, saturated flow phase, and jamming flow phase, appear with the increase of density. When the split is larger than the critical value, four kinds of traffic phases, i.e., free flow phase, coexisting phase, saturated flow phase, and jamming flow phase are distinguished. The delay caused by the mutual interference between pedestrians and motor vehicles is closely related to the state of vehicle flow and the state of pedestrian flow. When the arrival rate of pedestrians is quite large and the split is large enough, these pedestrians in the waiting area cannot be emptied once in a single pedestrian cross-street cycle. The qualitative and quantitative characteristics of mutual interference between pedestrians and vehicles are discussed in more detail. The setting of a reasonable split not only ensures the efficiency of traffic flow, but also reduces the waiting time of pedestrians to cross the street.Keywords: cellular automata /lattice gas model /pedestrian-vehicle interference /delay 全文HTML --> --> --> 1.引 言 交叉路口是城市道路网络中的重要节点, 也是瓶颈所在. 在流量较大的交叉路口通常都安装了交通灯, 属于信号交叉口. 交叉口机动车与行人之间的冲突主要发生在人行横道处. 由于交通灯的调控作用, 行人过街的安全性显著提高, 但仍然存在着机动车与行人的相互干扰. 即使不考虑行人绿灯期间过街行人与右转车辆之间的冲突, 当直行车辆在绿闪期间越过停车线, 若交通灯由绿转红时车辆仍继续通过路口则会导致行人运动延误. 另一方面, 由于大城市中不少主干道的车道数偏多, 路面过宽致使人行横道过长, 当行人绿灯相位配时不足时, 往往当车辆绿灯亮起时, 行人还没有走出人行横道, 从而导致车辆运动的延误. 因此很有必要研究信号交叉口处车辆和行人之间的相互干扰.[1 -4 ] ; 从安全的角度对行人过街的安全性进行评估[5 ,6 ] ; 对人行横道上的行人过街行为进行动力学建模和模拟[7 -11 ] ; 对信号交叉口的机动车流进行动力学建模和模拟[12 -15 ] . 这些模型多从微观角度描述机动车或行人个体的运动, 如行人流的社会力模型[16 ] 、格子气模型[17 ] , 机动车的优化速度模型[18 ] 以及行人和机动车的元胞自动机模型[19 -21 ] , 它们可以细致地反映车辆之间、行人之间以及人-车之间的复杂相互作用. 以往的研究中多以机动车流或行人流中的一种为主要研究对象. 如Zeng等[10 ] 基于行人心理, 建立了考虑群体规避和个体规避、转弯车辆避碰等典型交叉口行人行为的改进社会力模型; Belbasi和Foulaadvand[12 ] 采用NaSch模型研究单个信号交叉口的机动车流特征, 并考虑了固定时长的交通灯和自适应交通灯.[22 -30 ] , 其中元胞自动机模型是近年来被广泛用于交通流模拟的一类模型. 由于在信号交叉口行人和机动车之间存在着相互干扰, 因此对机动车流和行人流同步模拟才能更好地反映人-车相互作用的机理. Xie等[24 ] 采用元胞自动机模型研究了信号人行横道的混合交通特性, 考虑了人-车之间的相互作用机制, 并引入谨慎、正常和冒险三种不同类型的行人, 发现三种类型的行人在频率曲线上均存在两个局部最大值, 这一现象与真实的交通状况是一致的. Li等[25 ] 提出了一种元胞自动机模型, 用于模拟信号交叉口行人和车辆的过马路行为, 研究了不同行人信号周期和人行横道宽度对人行横道通行能力、行人与车辆之间的冲突数量以及冲突导致的行人延误. 孙泽和贾斌[26 ] 通过引入行人和机动车的冲突干扰规则, 构建了能够描述人行横道处机动车和行人相互干扰行为的元胞自动机模型, 并通过数值模拟研究了行人到达率、机动车到达率、行人冒险穿越机动车道的阈值以及行人对机动车敏感系数等因素对机动车和行人流量的影响. 余艳等[27 ] 基于VDR (velocity-dependent- randomization)模型[21 ] , 建立行人与机动车相互干扰的元胞自动机模型, 在开放边界条件下研究有、无交通灯控制时车辆产生概率、消失概率和交通灯绿信比对车辆交通流和行人流的影响. 此外, ****们对无信号交叉口的人-车相互干扰也开展了大量的研究. 值得一提的是, 近年来自动驾驶车辆的出现也进一步推动了人-车相互干扰的研究[31 ] .[3 ] . 这一特征尚未在已有的工作中得到充分的展现. 基于上述分析, 本文根据信号交叉口的机动车和行人流运动特征, 分别建立了相应的微观离散模型, 对机动车和行人相互作用进行了细致的研究, 并深入分析人-车相互干扰的机理.2.行人-车辆运动的微观离散模型 在已有的机动车-行人微观离散模型中, 从模拟效率的角度考虑, 常采用较为简单的模型, 如Nagel和Schreckenberg[19 ] 提出的NaSch模型以及Blue和Adler[20 ] 提出的行人流元胞自动机模型. NaSch模型[19 ] 原用于描述高速公路交通流(属于连续交通流), 虽然目前已经提出了很多机动车元胞自动机模型, 但由于NaSch模型规则简单, 计算效率高, 因此得到广泛应用. 尽管NaSch模型不能再现同步流, 但是由于城市地面道路通常较短, 受到交通灯的制约, 难以出现同步流等自组织现象. 基于上述考虑, 本文所提出机动车运动模型仍是基于NaSch模型, 并充分考虑交通灯对司机驾驶行为的影响. 本文假设人-车不能共存于冲突区(见图1 ), 即在人行横道内车辆不会作为障碍物而出现, 这种行人运动场景相对简单, 因此行人过街可用较为简单的格子气模型来描述, 相比于元胞自动机模型, 其优点是采用随机串行更新规则, 避免了并行更新时发生的行人冲突[32 ,33 ] .图 1 信号交叉口人-车相互作用示意图Figure1. Schematic diagram for vehicle-pedestrian interaction at a signalized crossing2.1.研究场景和基本假设 2.1.研究场景和基本假设 将信号交叉口处行人过街和车辆通行的场景简化如下: 长为L 的车道中间设有一个与其垂直的人行横道. 车道与人行横道的重叠部分称为冲突区. 在冲突区的下游边缘设置一个交通灯, 如图1 所示. 图中位于停车线后的紫色矩形区域代表一辆车, 箭头所示为其运动方向, 即车辆由左向右行驶; 三角形代表向上运动的行人. 停车线附近的车道可分为三部分: 冲突区、冲突区上游和下游. 在冲突区上游(即停车线左侧)设置了一个减速区, 位于减速线和停车线之间, 其长度为${L_{\rm{D}}}$ . 车辆由冲突区的下游离开. 人行横道包括两个部分: 冲突区和等待区. 冲突区长为${W_{\rm{C}}}$ , 宽为$W$ (即车道的宽度). 冲突区的上游为行人等待区, 其长度为${L_{\rm{W}}}$ .${T_{\rm{G}}}$ ; 车辆红灯相位即行人绿灯相位, 其周期为${T_{\rm{R}}}$ , 此时行人可以过街, 车辆则需在停车线后等待.2.2.行人运动模型 -->2.2.行人运动模型 本文仅考虑同向行人过街的情况. 由于人行横道内没有障碍物, 且行人运动区域的几何形状简单, 因此行人的期望运动方向明确, 这里我们采用最基本的格子气模型来描述行人的运动. 格子气模型可以视为一种特殊的元胞自动机模型, 通常采取随机串行更新规则. 将人行横道离散成由正方形元胞组成的二维网格. 一个元胞的大小就是典型行人所占的面积, 即0.4 m × 0.4 m.[2 ] 的观测表明行人步行速度在过街绿灯周期的不同阶段会有所变化: 当行人绿灯信号启亮, 平均步行速度为1.00—1.35 m/s; 当行人绿灯时间过半, 平均步行速度为1.28—1.56 m/s; 当行人绿灯闪烁, 平均步行速度为1.56—2.12 m/s. 可见行人在过街绿灯周期内的平均步行速度是随着时间的增加而逐步增大, 并非恒定不变. 此结果与日常经验相符, 应当在行人流模型中有所体现. 由上述实测数据可知, 行人最大速度${U_{\max }}$ 可达2 m/s左右, 即每秒运动5个元胞. 本文采用多步模型来实现, 即将1 s分为5个子时间步, 每个子时间步行人最多移动1个元胞.$p = {p_0}$ , 起动概率$q = {q_0}$ , 且$0 < {p_0} < 1$ , $0 < {q_0} < 1$ . 如果行人尚在冲突区内, 则直接设$p = 1$ , $q = 1$ , 即行人将会用确定性的方式以最快速度离开冲突区. 如果行人尚未进入冲突区, 则到达路边(即等待区上边界)后, 将会停下等待. 其中, 行人直行概率$p$ 反映了行人选择出行目的方向(即下游出口方向)概率的权重, 起动概率$q$ 则反映行人运动过程中可能出现的延迟, 与VDR模型[21 ] 中车辆的慢启动类似.$p$ 和起动概率$q$ 随时间$t$ 线性增加:${T_{\rm{R}}}$ 为行人绿灯周期长度; 时间$t \in [0, {T_{\rm{R}}}]$ , 当行人绿灯启亮瞬间, 有$t = 0$ .$r < q$ 时才可以运动. 其中$r$ 是在$\left[ {0, 1} \right]$ 之间均匀分布的随机数. 如不特别说明, 后文中出现的$r$ 总是指这种类型的随机数.$i$ 可以运动, 则有四种可能选择, 即向前、向左或向右运动, 还可以停在原地不动. 行人$i$ 左侧、前方和右侧元胞的状态${S_i}$ 用一个数组表示$\left( {{s_{\rm{L}}}, {s_{\rm{F}}}, {s_{\rm{R}}}} \right)$ , 其中每个分量可取0或1, 表示对应的元胞为空或被占据, 如$\left( {0, 1, 0} \right)$ 表示行人左右两侧元胞无人, 而其前方的元胞被占据. 行人根据概率$\left( {{p_{\rm{L}}}, {p_{\rm{F}}}, {p_{\rm{R}}}} \right)$ 随机选择目标元胞, 然后进入该元胞或停留在原位, 如表1 所列. 其中${p_{\rm{L}}}$ , ${p_{\rm{F}}}$ 和${p_{\rm{R}}}$ 分别表示行人向左、向前和向右运动的概率.${S_i}$ (0, 0, 0) (1, 0, 0) (0, 0, 1) (0, 1, 0) (1, 0, 1) (0, 1, 1) (1, 1, 0) (1, 1, 1) ${p_{\rm{L}}}$ $\dfrac{{1 - p}}{3}$ 0 $\dfrac{{1 - p}}{2}$ 1/2 0 1 0 0 ${p_{\rm{F}}}$ $p + \dfrac{{1 - p}}{3}$ $p + \dfrac{{1 - p}}{2}$ $p + \dfrac{{1 - p}}{2}$ 0 1 0 0 0 ${p_{\rm{R}}}$ $\dfrac{{1 - p}}{3}$ $\dfrac{{1 - p}}{2}$ 0 1/2 0 0 1 0
表1 各种情况下行人向邻近元胞的行走概率Table1. Probabilities for a pedestrian to move towards his/her neighboring cells$\lambda $ 满足泊松分布. 行人等待区最多可以容纳${L_{\rm{W}}} \times {W_{\rm{C}}}$ 个人, 每隔1 s会在等待区的下边界随机产生一些新的行人, 并向上游运动. 本文取${\lambda _{\max }} = 2$ , 相当于1 h内有7200人通过路口(对于一般路口而言, 这已是足够大的行人流量). 行人在边界以一定概率$\gamma $ 消失. 为简单起见, 本文中取$\gamma = 1$ , 即行人达到冲突区的上边界处可自由离开.2.3.车辆运动模型 -->2.3.车辆运动模型 为了准确描述车辆的起动和刹车过程, 本文在网格细化的NaSch模型上考虑交通灯的影响. 为与行人流模型匹配, 车道也离散成长度为0.4 m的元胞. 根据假设3), 暂不考虑车辆的横向运动, 因此冲突区以外的车道不必离散成二维的网格. 当交通灯切换时, 需要考虑司机的预期反应, 为此在停车线上游设置长为${L_{\rm{D}}}$ 的减速区. 当交通灯由绿转红时, 减速区内的车辆会采取相应的减速措施, 避免出现交通事故.$i$ 而言, 在$t$ 时刻它的位置为${x_i}(t)$ , 速度为${v_i}(t)$ , 车长均为${l_{\rm{c}}}$ . 其运动规则如下.${a^ + }$ 为车辆加速时的加速度值.${d_i}(t)$ 为车辆$i$ 与前车的间距,$i$ , 考虑司机驾驶行为中的不确定因素而导致的随机减速:${p_{\rm{d}}}$ 为随机减速概率, ${a^ - }$ 为随机减速时的加速度值.i :${\varDelta _i} = {x_{\rm S}} - {x_i}(t)$ 是车辆$i$ 到停车线的距离, 且${\varDelta _i} \leqslant {L_{\rm{D}}}$ , ${x_{\rm{S}}}$ 是停车线的位置, $a_{\max }^ - $ 是正常减速时允许的最大加速度值.$j$ , 如果它即将到达停车线, 则根据当前速度预测该车是否可以顺利在停车线前减速停下. 如果$j$ 将会在停车线后停下, 否则它将继续驶过路口.2.4.人-车相互作用 -->2.4.人-车相互作用 由于交通灯的调控, 直行车辆和过街行人的运动基本分离, 而当交通灯切换时, 车辆与行人之间将发生相互干扰.$T_{\rm{p}}^{\rm{c}}$ 表示.$T_{\rm{c}}^{\rm{p}}$ 表示.3.数值模拟与分析 23.1.参数设置 3.1.参数设置 模拟时车道长度$L = 3000$ , 车道宽度$W = 10$ , 减速区长度${L_{\rm{D}}} = 120$ , 人行横道宽度${W_{\rm{C}}} = W$ , 等待区长度${L_{\rm{W}}} = 20$ . 假设所有车辆都是同样的轿车, 车长${l_{\rm{c}}} = 10$ , 最大速度${V_{\max }} = 40$ , 加速时的加速度值${a^ + } = 4$ , 减速时的最大加速度值$a_{\max }^ - = 10$ . 这样车辆可以在10 s加速到最大速度, 并可以在4 s以内减速到零, 可以较好地反映车辆的实际运动情况. 车辆的随机减速概率${p_{\rm{d}}} = 0.3$ .$\lambda $ , 且$0 < \lambda \leqslant 2$ . 设${p_0} = 0.8$ , ${q_0} = 0.6$ , 据此可以估算, 在行人绿灯周期开始时行人平均速度约为1.2 m/s, 即将结束时约为2.0 m/s.T = 100 s, 即车辆绿灯周期${T_{\rm{G}}}$ 与行人绿灯周期${T_{\rm{R}}}$ 之和: $T = {T_{\rm{G}}} + {T_{\rm{R}}}$ . 绿信比$\mu $ 定义为车辆绿灯周期${T_{\rm{G}}}$ 与交通灯周期时长$T$ 的比值, 即${T_{\rm{R}}} = (1 - \mu )T$ . 本文中设$\mu \geqslant 0.5$ .$k$ 定义为${N_{\rm{c}}}$ 为车辆总数.$V$ 定义为${T_0}$ 是系统达到稳态的时间, ${T_1}$ 是计算速度平均值所用的总时间步长.${J_{\rm{c}}}$ 定义为3.2.典型参数下模型的基本性质 -->3.2.典型参数下模型的基本性质 首先研究不同绿信比$\mu $ 时车辆运动的基本图. 模拟结果显示, 存在一个临界绿信比${\mu _{\rm{c}}} \approx 0.8$ . 当$\mu \leqslant {\mu _{\rm{c}}}$ 时, 可以观察到两个临界密度${k_1}$ 和${k_2}$ , 见图2(a) . 当$k < {k_1}$ 时, 车流处于自由流相, 其特征为车流量${J_{\rm{c}}}$ 随密度$k$ 的增大而线性增加, 平均车速为常数, $V \approx {V_{\max }} - a_{\max }^ - = 30$ , 见图2(b) ; 当${k_1} \leqslant $ k ≤ k 2 时, 车流处于饱和流相, 在流密曲线中出现一个流量平台, 此时车流量${J_{\rm{c}}}$ 约为一常数${J_0}$ , 表明绿灯期间通过的车辆数大致相等. 这是交通灯控制下间断交通流的普遍特征; 当$k > {k_2}$ 时, 是拥堵流相, 此时流量随密度增大而线性减少, 这是由于上游路段的剩余空间限制了绿灯期间可以通过的数量. 当$k > {k_1}$ 时, 平均速度随密度的增加而单调减少. 由图2 可见, 不同行人到达率$\lambda $ 对车辆运动基本图的影响并不明显, 表明车辆的运动主要取决于绿信比, 与实际情况相符. 随着绿信比$\mu $ 的增大, 车辆通行时间相应增加, 饱和流量值${J_0}$ 随之增大, 同时${k_1}$ 逐渐增大, 而${k_2}$ 逐渐减小, 即流量平台出现的密度范围逐渐减小, 见图2(c) . 这表明, 当$\mu $ 较大时, 虽然车流量更大, 但也更容易发生交通拥堵. 值得注意的是, 在图2(d) 中, 当$\mu = 0.9 > {\mu _{\rm{c}}}$ 时, 此时未饱和流相可以分为两段, 当$k < {k_0}$ 时, 车流量随密度线性增加, 且$V \approx {V_{\max }} = 40$ , 为自由流相; 当$k > {k_0}$ 时, 平均速度随密度的增加而单调减小, 但当${k_0} \leqslant k < {k_1}$ 时, 车流量仍随密度线性增加, 见图2(c) .图 2 不同绿信比下车辆运动基本图 (a)流量-密度曲线(μ = 0.5); (b)速度-密度曲线(μ = 0.5); (c)流量-密度曲线(μ = 0.9); (d)速度-密度曲线(μ = 0.9)Figure2. Fundamental diagrams for vehicles under different splits: (a) Flux-density relation (μ = 0.5); (b) speed-density relation (μ = 0.5); (c) flux-density relation (μ = 0.9); (d) speed-density relation (μ = 0.9).图3 给出了典型密度下的车辆运行时空斑图, 是模拟1 h后取两个交通灯周期、处于[x S – 600, x S + 600]范围内的车辆运动轨迹, 其中每个点代表一辆车, 绿色和红色竖线分别表示处于车辆绿灯和红灯周期内. 图3(a) 为自由流相, 车辆在红灯周期结束前开始在停车线后排队, 在绿灯周期结束前全部通过路口. 这表明车辆不会直接影响行人过街. 从图中可以观察到明显的刹车波和起动波, 小尺度的交通拥堵向上游传播并消散. 图3(b) 为饱和流相, 红灯期间出现车辆排队, 由于此时排队的车辆足够多, 在绿灯期间通过路口的车辆数主要取决于绿灯周期的长度. 在饱和流相, 绿灯期间通过路口的车辆数基本不变. 图3(c) 为拥堵流相, 可以发现饱和流与拥堵流之间的差别. 拥堵流相时下游车辆的拥堵不但会向上游传播, 还会影响到上游路口车辆的通行. 图3(d) 给出了k = 0.15 (k 0 < k < k 1 )时的车辆运动斑图. 可以发现既有车辆自由通过路口, 也有红灯期间形成小尺度拥堵的消散过程, 因此本文将图2(c) 和图2(d) 中${k_0} < k < {k_1}$ 范围内的交通流相称之为共存相, 其平均车速随着车辆密度增加而减小, 见图2(d) . 当$k < {k_0}$ 时, 车辆均可自由通过路口, 因此$V \approx {V_{\max }}$ .图 3 车辆运动时空演化斑图($\lambda = 1.0$ ) (a) k = 0.08, μ = 0.5; (b) k = 0.40, μ = 0.5; (c) k = 0.70, μ = 0.5; (d) k = 0.15, μ = 0.9Figure3. Temporal-spatial patterns of vehicles in motion ($\lambda = 1.0$ ): (a) k = 0.08, μ = 0.5; (b) k = 0.40, μ = 0.5; (c) k = 0.70, μ = 0.5; (d) k = 0.15, μ = 0.9.3.3.行人等待时间的影响 -->3.3.行人等待时间的影响 行人等待时间${T_{\rm{W}}}$ 定义为从行人进入等待区到行人离开等待区(即进入冲突区)的时间之差的平均值. 图4 反映了四种典型行人到达率下车辆运动对于行人等待时间的影响, 可以观察到车辆运动基本图(参考图2 )与行人等待时间两者之间的相关性. 当$\mu \leqslant {\mu _{\rm{c}}}$ 时, 发现车流处于自由流相($k < {k_1}$ )时, ${T_{\rm{W}}}$ 可以视为不随车辆密度而变化的常数, 从图3(a) 可知, 这是由于车辆绿灯周期结束之前, 所有车辆已经通过路口, 因而不会影响行人过街. 当车流是饱和流状态(${k_1} \leqslant k \leqslant {k_2}$ )时, 车队在绿灯期间的消散过程类似, 对行人过街的影响大致相同, 可以预期会出现一个等待时间平台, ${T_{\rm{W}}}$ 也近似为一个常数. 由于行人绿灯周期足够长, 在车辆绿灯期间集聚的行人基本可以一次通过, 但是若交通灯由绿转红时仍有车辆通过路口, 行人只能等其离开冲突区再过街, 因而导致${T_{\rm{W}}}$ 略有增大. 当$k > {k_2}$ 时, 车辆处于拥堵流状态时, 车辆可能滞留在冲突区, 因而导致${T_{\rm{W}}}$ 明显增加, 特别是行人到达率$\lambda $ 很大时, 见图4(b) . 当$\mu = 0.9 > {\mu _{\rm{c}}}$ 时, 由于行人绿灯周期过短, 即使车辆密度很小, 当行人到达率$\lambda = 2$ 时因为等待过街行人很多而无法一次清空, 因此行人等待时间很长, 见图4(c) . 随着$\mu $ 的增加, ${T_{\rm{W}}}$ 也相应增大. 当行人到达率$\lambda $ 还不够大时(如$\lambda = 1$ ), 此时可将人行横道视为十车道情形, 行人以最大速度${U_{\max }} = 5$ 运动, 因此在较短时间内, 可以通过相当多的行人. 在车辆绿灯期间积累的人群在行人绿灯周期都可以清空(不考虑在车辆绿灯周期即将结束时刚进入等待区的行人). 当$\lambda = 2$ 时, 行人绿灯启亮时, 等待区已经充满了行人. 当红转绿时, 仍有不少行人滞留在等待区. 这也使得在车辆绿灯周期内, 等待区很容易被人群充满.图 4 不同绿信比下行人等待时间随车辆密度的变化 (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9Figure4. Waiting time of pedestrian varies with vehicle density under different splits: (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9.图5 给出了四种典型车辆密度下行人等待时间${T_{\rm{W}}}$ 随行人到达率$\lambda $ 的变化趋势. 由图5 可见, 对于给定的车辆密度$k$ , 随着行人到达率$\lambda $ 的增加, 行人等待时间${T_{\rm{W}}}$ 相应增大. 对于同一绿信比和行人到达率, 车辆密度越大, 行人等待时间越长. 当$\mu = 0.5, 0.6$ 时, 车辆处于自由流与饱和流$(k \!=\! 0.1, 0.3, 0.5 < {k_2}$ , 参考图2(a) ), 由于车辆运动对行人过街的干扰很少, 且行人绿灯周期够长, 因此${T_{\rm{W}}}$ 随$\lambda $ 的增加而缓慢增大. 对于拥挤流状态$k = 0.7 \!>\! {k_2}$ , 由于车辆会暂时滞留在冲突区, 对行人过街影响很大, 但是因为红灯周期足够长, 行人仍可顺利过街. 当$\mu = 0.7, 0.8$ 时, 对于k = 0.1, 0.3 < k 2 , 车流尚未超出饱和流相范围, ${T_{\rm{W}}}$ 随$\lambda $ 缓慢增长. 但由于车辆绿灯周期长, 行人的等待时间明显增加. $k = 0.5, 0.7 > {k_2}$ 时车流处于拥挤流相. 当$\lambda < {\lambda _{\rm{c}}}$ 时, ${T_{\rm{W}}}$ 随$\lambda $ 缓慢增长, 由于此时人数较少, 虽然行人绿灯周期较短, 仍可基本一次清空. ${\lambda _{\rm{c}}}$ 依赖于$\mu $ 和$k$ . 当$\lambda\; (\lambda > {\lambda _{\rm{c}}} \approx 1.0)$ 足够大时, ${T_{\rm{W}}}$ 会较快增长, 如图5(b) 所示. 当$\lambda $ 足够大时, ${T_{\rm{W}}} > T$ (明显大于交通灯周期), 这表明有些行人在一个交通灯周期内没能过街. 值得注意的是, $\mu = 0.9$ 时, 由于行人绿灯周期很短, 即使车辆密度很小(如$k = 0.1$ )时, 当$\lambda $ 足够大时, ${T_{\rm{W}}}$ 会快速增长, 见图5(c) , 这是由于车辆绿灯周期过长, 在等待区积累的大量行人无法在很短的行人绿灯周期内通过人行横道, 而滞留的行人又容易导致等待区满员, 但与高车辆密度情况相比, 仍有明显的差别, 这表明滞留在冲突区的车辆对行人过街影响很大. 此外, 当$\lambda $ 较小时, 不同车辆密度下${T_{\rm{W}}}$ 随$\lambda $ 变化曲线基本重合. 这表明当行人来流较小时, 绝大部分行人还可以顺利过街, 即使行人绿灯周期很短.图 5 不同绿信比下行人等待时间随行人到达率的变化 (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9Figure5. Waiting time of pedestrians varies with the arrival rate of pedestrian under different splits: (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9.3.4.人-车相互作用 -->3.4.人-车相互作用 下面研究人-车相互干扰所导致的延误, 即由于车辆红灯(绿灯)期间车辆(行人)占据冲突区所导致的行人(车辆)的延误. 首先研究车辆对行人的影响, 包括车辆红灯周期内滞留在冲突区的车辆或者交通灯刚由绿转红时才进入冲突区的车辆. 出于安全考虑, 即使行人绿灯已经启亮, 此时行人也不会进入冲突区, 因此这两种情况下车辆都会占用行人过街时间.图6 给出了每小时车辆占用行人通行时间的时长, 用$T_{\rm{p}}^{\rm{c}}$ 表示, 单位为s. 可以看出, 当绿信比较小($\mu \leqslant 0.7$ )时, 如果车辆密度较小($k < {k_1}$ ), 车流在绿灯结束前已经全部通过路口, 参考图3(a) , 因此车辆对行人过街没有影响, 见图6(a) . 同时可以发现在${k_1} \leqslant k \leqslant k{}_2$ 内出现一个$T_{\rm{p}}^{\rm{c}}$ 平台, 这是由于在此密度范围, 车流通过路口的情况类似, 即车辆从静止开始启动, 然后陆续通过路况. 而当$k > {k_2}$ 时, $T_{\rm{p}}^{\rm{c}}$ 快速增大. 这是由于在行人绿灯期间滞留在冲突区的车辆所致. 行人绿灯周期, 即${T_{\rm{R}}}$ 越长, 滞留车辆的影响越大. 当$\lambda = 2.0$ 时, $T_{\rm{p}}^{\rm{c}} \approx $ 1200 s, 而行人每小时的总通行时间为1800 s, 即平均而言, 每个行人绿灯周期的近${2 / 3}$ 时间受到车辆的影响而不能过街. 此外, 不同$\lambda $ 时, 行人延误时间曲线没有明显的差异, 这是由于行人绿灯周期足够长. 当$\mu = 0.8$ 时, 发现由于行人绿灯周期的缩短, 在高密度时, 车辆对行人过街的影响显著减小, 且$\lambda $ 越大, 相同车辆密度下的$T_{\rm{p}}^{\rm{c}}$ 越大, 见图6(b) . 有趣的是, 当$k < {k_1}$ 时, $\lambda $ 越小, 相同车辆密度下的$T_{\rm{p}}^{\rm{c}}$ 越大. 这表明在某些情况下, 零散过街的行人比成群过街行人受到的影响更大. 当$\mu = 0.9$ 时, 行人绿灯周期很短. 当$k < {k_0}$ 时车辆处于自由流相, 交通灯由绿转红时, 来不及刹车的车辆将继续通过路口而影响行人过街, $T_{\rm{p}}^{\rm{c}}$ 随着车辆密度的增加而增大. 当${k_0} \leqslant k < {k_1}$ 时, 既有自由流也有排队等候通过路口的车辆, 见图3(d) , 但影响行人过街的主要是在车辆绿灯周期结束前刚进入冲突区的车辆, 出现一个平台表明在此密度范围内通过路口此类车辆数目大致相等, 也表明随着密度的增大, 排队的车辆线性增加. 当$k > {k_2}$ 时, $T_{\rm{p}}^{\rm{c}}$ 显著减小, 这是由于行人绿灯周期很短, 车辆的影响有限. 即使当$\lambda = 2.0$ 时, $T_{\rm{p}}^{\rm{c}}$ 也仅略大于${k_1} \leqslant k < {k_2}$ 间的$T_{\rm{p}}^{\rm{c}}$ 平台值, 见图6(c) .图 6 不同绿信比时车辆所导致的行人延误 (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9Figure6. Pedestrian delay time caused by vehicles under different splits: (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9.图7 可以看出, 当行人到达率较小时(或者行人绿灯周期长), 行人对于车辆的影响主要是陆续到达的行人直接通过路口(车辆绿灯周期在路口累积的等待过街行人已经在行人绿灯亮起后率先过街了), 当车辆红灯已转绿, 此时尚未完全通过路口的行人会造成车辆运动的延误, 因而随行人到达率的增加而增大. 图7(b) 中较高车辆密度时, 由于上游车辆拥堵延伸到路口, 阻碍了行人过街, 加上红灯周期时间不够长, 在路口聚集的大量行人在较少的通行时间内集中过街而导致车辆的延误明显增大.图 7 不同绿信比时行人造成车辆的延误 (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9Figure7. Vehicle delay time caused by pedestrians under different splits: (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9.图7(a) 可知, 当$\mu $ 较小时, 行人有足够的时间过马路, 影响车辆通行的主要因素是行人绿灯周期内滞留在冲突区内的行人. 随着行人到达率$\lambda $ 增加, $T_{\rm{c}}^{\rm{p}}$ 也相应增大, 但增速逐渐减缓. 当车流处于拥堵流状态($k = 0.7$ )时, 行人对车辆的影响也略有增大. 由图7(b) 可知, 当到达率较大时, 虽然行人较多, 过街时间还足够, 当$k < {k_2}$ 时, 行人对车辆的影响与$\mu = 0.5$ 时基本一致. 由于此时车辆不会占据冲突区, 行人可以顺利过街(虽然行人绿灯周期已经明显变短). 当$k > {k_2}$ 时(车辆处于拥堵状态), 由于车辆挤占行人过街时间, 会造成密集人群集中过街, 因此交通灯红转绿时, 行人滞留冲突区的概率增大, 对车辆产生更大的影响. 当行人达到率$\lambda $ 较大时, 图中出现一个平台. 由于等待区容量有限, 此$\lambda $ 区间内行人都将充满等待区, 人群的消散过程类似, 对车辆的影响基本相同, 表现为图中的平台. 由图7(c) 可知, 当交通灯由红转绿时, 仍有大批行人集中进入冲突区. 当达到率相当大时, 上游来流可以认为近似不变. 即使车辆密度很小, 由于行人来流足够大时, 聚集的人群也无法在很短的行人绿灯周期内清空. 在等待区存在需要二次清空的人群, 当行人入流较大($\lambda > 1$ ), 等待区几乎总是处于满员状态, 因此出现了一个$T_{\rm{c}}^{\rm{p}}$ 的平台. 如果继续扩大等待区的范围, 由行人滞留冲突区所造成的车辆延误还会有所增大.3.5.相 图 -->3.5.相 图 下面研究人-车相互作用系统的全局性质. 图8 和图9 分别给出了车流量${J_{\rm{c}}}$ 和行人等待时间${T_{\rm{W}}}$ 随车辆密度$k$ 和行人到达率$\lambda $ 的三维分布图. 从图8 可见, 在不同$\lambda $ 下车流量随$k$ 的变化曲线具有类似的特征. 当$\mu < {\mu _{\rm{c}}}$ 时, 车流都可以分为三种状态, 即自由流相、饱和流相和拥堵流相, 见图8(a) . 当$\mu > {\mu _{\rm{c}}}$ 时, 车流都可以分为四种状态, 即自由流相、共存相、饱和流相和拥堵流相, 见图8(b) . 值得说明的是, 当$\mu > {\mu _{\rm{c}}}$ 时, 从流量上看, 自由流相和共存相的区分不太明显, 可以参考图2(d) . 随着绿信比$\mu $ 的增加, 临界密度${k_1}$ 增大, ${k_2}$ 减小, 饱和流量值相应增大. 由图9 可见, 行人等待时间呈现出复杂的空间分布情况. 在$\mu < {\mu _{\rm{c}}}$ 的情况下, 当$k < {k_2}$ 时, 行人的等待时间较短, 通常等待时间不会超过${{{T_{\rm{G}}}} / 2}$ , 行人绿灯开启后已经在等待区的行人可以一次过街; 而当$k > {k_2}$ 且行人到达率较大时, 等待区内行人很多, 且因过街时间被车辆占用较多, 因此行人绿灯开启后已经在等待区的人群无法清空, 当$\mu > {\mu _{\rm{c}}}$ 时尤为明显, 由于行人绿灯周期很短, 即使车辆密度不大, 当行人来流很大时, 也不可能一次清空等待过街的人群, 见图9(b) .图 8 车流量随车辆密度和行人到达率的变化 (a) μ = 0.5; (b) μ = 0.9Figure8. Flux as a function of vehicle density and pedestrian arrival rate: (a) μ = 0.5; (b) μ = 0.9图 9 行人等待时间随车辆密度和行人到达率的变化 (a) μ = 0.5; (b) μ = 0.9Figure9. Waiting time of pedestrian as a function of vehicle density and pedestrian arrival rate: (a) μ = 0.5; (b) μ = 0.9.图9 和图10 , 可以绘制出在$(\lambda, k)$ 空间的相图. 当$\mu < {\mu _{\rm{c}}}$ 时相图可以分为4个区: I区内车辆运动属于自由流, 行人可顺利过街(一次清空); II区内车辆运动属于饱和流, 行人可顺利过街(一次清空); III区内车辆运动属于拥堵流, 行人仍可顺利过街(一次清空); IV区内车辆运动属于拥堵流, 部分行人需要二次清空. 随着绿信比的增大, II区减小, 而I, III和IV区则相应增大. 当$\mu > {\mu _{\rm{c}}}$ 时相图可以分为8个区: I区—IV区内车辆运动分别属于自由流相、共存相、饱和流相和拥堵流相, 行人可一次清空; V区—VIII区车辆运动分别属于自由流相、共存相、饱和流相和拥堵流相, 而行人需二次清空. 随着绿信比的增大, 相图中行人需二次清空所占的区域也会相应增大. 值得说明的是, 上述相图是在信号周期T = 100 s时给出的. 根据本文所采用的道路长度, 当绿信比较大时, 自由流时车辆可以在其绿灯周期内进入该路段并通过, 而当绿信比较小时, 则在绿灯周期开始进入该路段的车辆无法在绿灯结束时通过该路段. 如果采取满足上述条件的信号周期, 可以预期将会得到与图10 类似的相图. 如果信号周期过短或者过长时, 则相图会有较大的变化. 本文所采用的信号周期长度属于真实交通最常见的一种情形.图 10 (λ , k )空间中的相图 (a) μ = 0.5; (b) μ = 0.9Figure10. Phase diagram in (λ , k ) space: (a) μ = 0.5, (b) μ = 0.9.4.结 论 基于信号交叉口司机对交通灯切换的预期效应以及行人过街时平均速度随着行人绿灯时间减少而增大的特征, 建立了描述机动车和行人运动的精细模型. 当车辆在遇到红灯时的刹车过程更加平滑, 其加速度控制在合理的范围内, 而对行人过街的刻画也更接近于实际. 人-车相互干扰主要体现在当交通灯切换时, 由于车辆或行人滞留在冲突区内对行人过街或车辆通行所造成的延误, 我们定义了相应的延误时间. 通过数值模拟, 给出了人-车相互干扰的定量特征, 并对其机理进行了详细的讨论, 可为提高交叉口的通行效率提供参考. 作为人-车相互作用的一种简化描述, 本文尚未考虑机动车和行人混杂出现在冲突区内的情况. 在现实交通中, 即使信号交叉口发生车辆拥堵甚至溢流的情况, 当行人绿灯启亮时, 行人仍可穿过车辆的间隙而过街. 这种类型的人-车相互干扰将在下一步的工作中继续研究.  图 1 信号交叉口人-车相互作用示意图
图 1 信号交叉口人-车相互作用示意图
















































































































 图 2 不同绿信比下车辆运动基本图 (a)流量-密度曲线(μ = 0.5); (b)速度-密度曲线(μ = 0.5); (c)流量-密度曲线(μ = 0.9); (d)速度-密度曲线(μ = 0.9)
图 2 不同绿信比下车辆运动基本图 (a)流量-密度曲线(μ = 0.5); (b)速度-密度曲线(μ = 0.5); (c)流量-密度曲线(μ = 0.9); (d)速度-密度曲线(μ = 0.9)


 图 3 车辆运动时空演化斑图(
图 3 车辆运动时空演化斑图(



















 图 4 不同绿信比下行人等待时间随车辆密度的变化 (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9
图 4 不同绿信比下行人等待时间随车辆密度的变化 (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9






























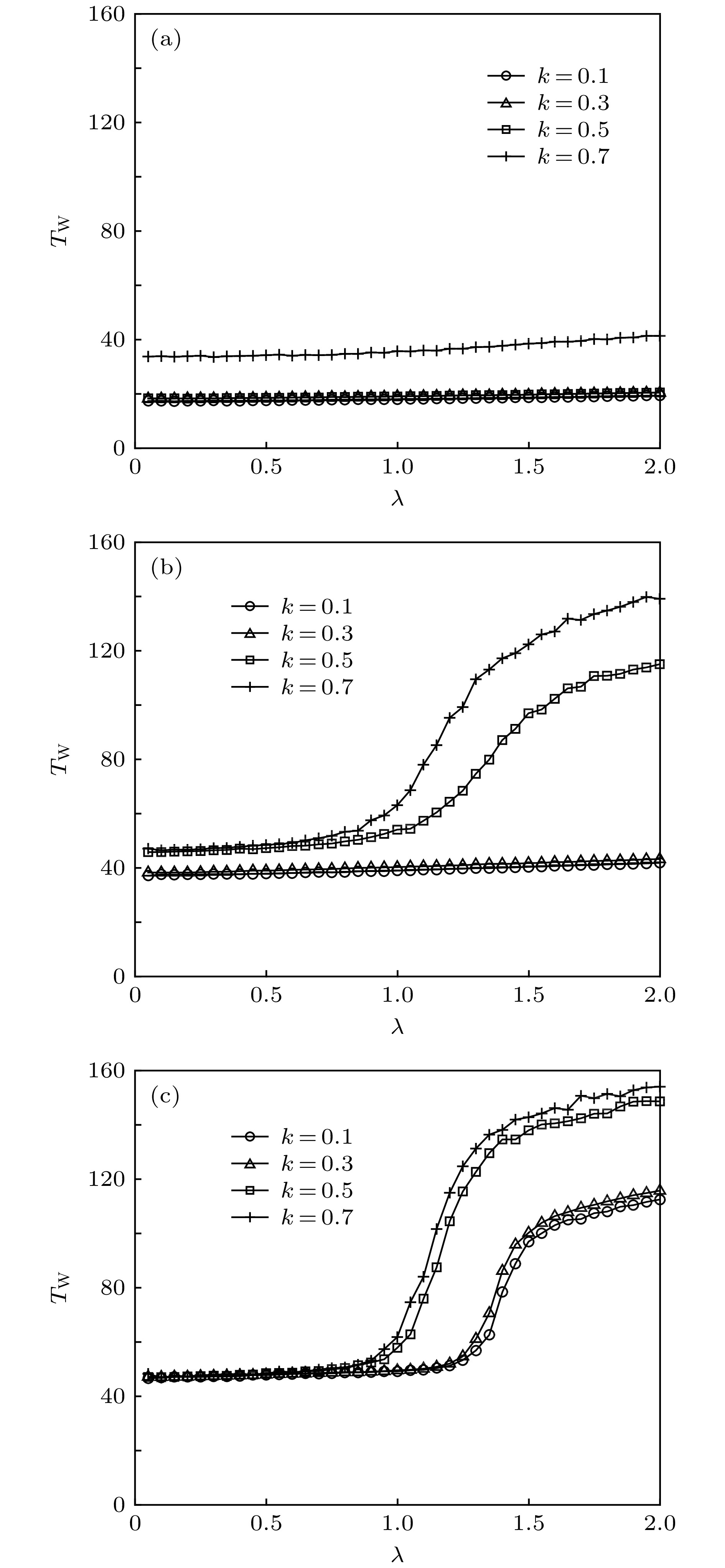 图 5 不同绿信比下行人等待时间随行人到达率的变化 (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9
图 5 不同绿信比下行人等待时间随行人到达率的变化 (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9



























 图 6 不同绿信比时车辆所导致的行人延误 (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9
图 6 不同绿信比时车辆所导致的行人延误 (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9 图 7 不同绿信比时行人造成车辆的延误 (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9
图 7 不同绿信比时行人造成车辆的延误 (a) μ = 0.5; (b) μ = 0.8; (c) μ = 0.9



























 图 8 车流量随车辆密度和行人到达率的变化 (a) μ = 0.5; (b) μ = 0.9
图 8 车流量随车辆密度和行人到达率的变化 (a) μ = 0.5; (b) μ = 0.9 图 9 行人等待时间随车辆密度和行人到达率的变化 (a) μ = 0.5; (b) μ = 0.9
图 9 行人等待时间随车辆密度和行人到达率的变化 (a) μ = 0.5; (b) μ = 0.9


 图 10 (λ, k)空间中的相图 (a) μ = 0.5; (b) μ = 0.9
图 10 (λ, k)空间中的相图 (a) μ = 0.5; (b) μ = 0.9