全文HTML
--> --> -->近年来, 随着现代信号处理技术的发展, 逐渐涌现出了一些适合微弱非周期脉冲信号探测的技术和方法, 例如: Power-Law检测法[1]、小波变换[2]、分数阶傅里叶变换[3,4]、希尔伯特-黄变换[5]、粒子滤波降噪[6]、高阶累积量降噪[7]等. 与这些方法相比, 混沌检测方法具有独特的优点, 例如可检测信噪比更低[8,9]、适用范围更广[10-14]等, 其原理是利用非线性系统对参数摄动的敏感性和对噪声的不敏感性, 通过系统相变或多个系统的耦合实现微弱信号探测[15,16].
自1992年Birx首次将混沌振子用于微弱信号检测以来, 混沌振子检测理论得到了不断改进和发展. 2006年, 李月等[17]首次提出了一种基于恢复力耦合的Duffing振子, 并应用该系统在高斯色噪声背景中检测周期方波信号, 取得了一定的效果. 2009年, Yuan等[18]通过观测Duffing振子的混沌程度来探测脑电图, 首次将混沌振子的检测范围从周期信号扩展到非周期信号. 之后越来越多的****利用Duffing振子进行有关非周期脉冲信号检测的研究. 2011年, 吴勇峰等[19, 20]发现脉冲信号能激励恢复力耦合混沌振子运动轨迹间出现瞬态同步突变现象, 并研究利用耦合Duffing振子从噪声背景中探测微弱局部放电信号[21]. 2015年, 张悦等[22]利用恢复力耦合Duffing振子对微弱电磁脉冲辐射信号进行远距离探测. 2015年, 曾喆昭等[23]使用广义时间尺度变换扩展了微弱脉冲信号的探测频率范围. 2016年, 王晓东等[24]提出了一种Duffing振子阻尼力耦合方法.
上述研究展现了混沌振子在微弱信号检测中广阔的应用前景, 但是总的来说基于混沌振子的时域微弱脉冲信号检测技术尚处于经验性的摸索阶段, 其实用性模型迄今鲜见报道, 工程应用尚属空白. 目前所提出的弱耦合Duffing振子具有明显的缺点, 如系统性能极大地依赖于系统初始状态、系统只能工作在倍周期分岔状态下、无法恢复被测信号的时域波形信息等. 为了解决这些问题, 本文对传统Duffing振子的耦合形式进行了改进, 通过对阻尼力和恢复力同时施加耦合, 构建了一个强相互作用的检测系统. 以信噪比改善和波形相似度为衡量指标, 研究了策动力幅值与周期、耦合系数、计算步长、阻尼系数等参量对模型信号检测与波形恢复效果的影响. 以强高斯白噪声背景中的方波、双指数脉冲、高斯导数脉冲为被测对象, 研究了强耦合系统的信噪比检测阈值与时域波形恢复效果. 实验结果表明该系统对初始状态不敏感, 可工作在任何相态, 信噪比改善(signal-to-noise ratio improvement, SNRI)可达20 dB, 对时域脉冲幅值和宽度的估计误差小于5%. 该方法在闪电信号探测、核爆炸电磁脉冲信号探测、局部放电探测、静电放电探测等被动信号探测研究领域具有重要的应用价值.




设




将广义时间变量


2011年, 吴勇峰等[19]基于(1)式构造了一种恢复力耦合的Duffing振子,
上述基于恢复力耦合的Duffing振子虽然可以实现–10 dB以下信噪比的微弱脉冲信号检测, 但检测原理决定了其存在以下的固有缺陷: 系统初始状态不同, 对正脉冲和负脉冲产生瞬态同步突变的能力不同; 系统只能工作在倍周期分岔状态下, 在混沌态和大尺度周期态时将会失效; 对微弱脉冲的幅值、宽度等信息不敏感, 无法恢复被测信号的时域波形. 由于其耦合系数较小, 本文称其为弱耦合Duffing振子.
3.1.强耦合Duffing振子方程及其数值求解
为了解决上述弱耦合Duffing振子存在的各种问题, 本文结合时间尺度变换构造了一种新的强耦合Duffing振子模型:


非线性常微分方程(4)没有解析解, 常用的数值解法是龙格-库塔(Runge-Kutta, RK)法, 本文使用MATLAB中求解微分方程的函数ode45对其进行求解, 该函数是一种解决刚性问题的变步长数值解法, 采用四阶RK算法提供候选解, 五阶RK算法控制误差, 整体截断误差为h5, 求解过程中的步长h、相对误差、绝对误差等参量可以自行设定[25].
2
3.2.强耦合Duffing振子检测原理
强耦合Duffing振子检测原理为广义的“阱内失同步”, 即通过较大的“恢复力”和“阻尼力”的共同耦合, 使得脉冲对振子1的作用可以同时作用在振子2上, 并且使得两振子在脉冲作用下的“瞬时突变”方向不同, 这样通过比较两振子相轨迹的差异, 即可对脉冲进行检测. “阱内失同步”是指两振子在倍周期状态下处于同一势阱时的同步受到破坏; 广义的“阱内失同步”, 是指两个振子在倍周期、混沌、大尺度周期等各种状态下的同步受到破坏. 基于广义“阱内失同步”原理的强耦合Duffing振子从根本上克服了弱耦合模型“阱间失同步”检测方法的缺陷.下面对强耦合Duffing振子的检测原理进行详细分析. 首先对单振子的动力学行为进行分析, 振子有1个鞍点(0, 0)和两个中心点(1, 0)和(–1, 0), 其阻尼系数

在周期策动力上施加脉冲信号s(t)和噪声n(t)后, 将有可能打破系统原有的运动状态. 若脉冲信号s(t)在Duffing振子固有谐振频率处的能量足够大, 就能够使相轨迹发生改变. 文献[23]从频域对冲击信号能谱、谐振频率与相轨迹变化三者的关系进行了定量描述. 从时域角度看, 当脉冲信号的宽度与振荡的周期可比拟并且脉冲强度足够大时, 即可使振子轨迹发生较大的改变, 并且脉冲强度越大, 轨迹突变程度越大, 当脉冲信号s(t)消失后, 轨迹又能很快恢复初始状态. 一定强度下随机变化的噪声n(t)具有各个频率分量, 不同频率分量的扰动会使振子偏离共振态, 但在谐振频率处的能量不足以使状态发生跃迁或轨迹发生大的改变, 只能在轨迹上留下一些粗糙的痕迹. 因此, 通过构造两个同步的耦合振子, 并使得脉冲信号s(t)在振子中产生的轨迹“失同步”, 就可以通过检测这种“失同步”实现对s(t)的检测, 并通过失同步的程度估计s(t)的波形参数.
(4)式的强耦合Duffing振子即可满足这种要求, 下面通过数值计算对其检测原理做进一步说明. 在振子1内置周期策动力










 图 1 强耦合Duffing振子检测微弱脉冲信号 (a)输入信号; (b)输出信号; (c)振子1相图; (d)振子2相图; (e)变量
图 1 强耦合Duffing振子检测微弱脉冲信号 (a)输入信号; (b)输出信号; (c)振子1相图; (d)振子2相图; (e)变量

Figure1. Detection of weak pulse signal using the strongly coupled Duffing oscillators: (a) Input signal; (b) output signal; (c) phase space of oscillator 1 and (d) oscillator 2; (e) time domain diagram of variable


这里使用波形相似度与信噪比改善两个指标衡量系统探测效能. 波形相似度(也称皮尔逊相关系数)可以从时域反映两个波形的相似程度, 其定义为


信噪比改善即检测系统输出信噪比与输入信噪比的差值,


| 参数 | 取值区间 | 默认值 |
| F | [0, 2] | 0.2 |
| $\omega $/${\rm rad}\cdot {{\rm s}^{-1}} $ | [1 × 105, 5 × 107] | 5 × 106 |
| k | [10–1, 103] | 10 |
| $\xi$ | [10–2, 102] | 0.7 |
| 计算步长/ns | [20, 1] | 1 |
表1强耦合Duffing振子各参数取值区间与默认值
Table1.Values range and default values of parameters in strongly coupled Duffing oscillators
2
4.1.周期驱动力幅值F (系统相态)
在使用固定计算步长并合理设置系统参数后, 通过逐步增加驱动力幅值F, 系统将出现周期振荡、分岔、混沌和大尺度周期等不同相态[26]. 下面分析系统处于不同相态时的信噪比改善与波形相似度情况.首先分析Duffing系统相态的变化区间, 当无被测信号时, 两振子完全同步. Duffing振子随参数F在区间[0, 2]内变化的分岔图如图2所示. 当F = 0时, 系统轨线将最终停在其中一个焦点; 当




 图 2 Duffing振子随参数F变化的分岔图
图 2 Duffing振子随参数F变化的分岔图Figure2. Bifurcation diagram of Duffing oscillator with parameter F
接下来观察强耦合Duffing振子在不同相态时检测微弱高斯脉冲信号的情况. 选取前沿5.5


100次实验的信噪比改善SNRI均值(及均方差)和波形相似度r均值与驱动力幅值F的关系如图3所示. 由图中可见SNRI在

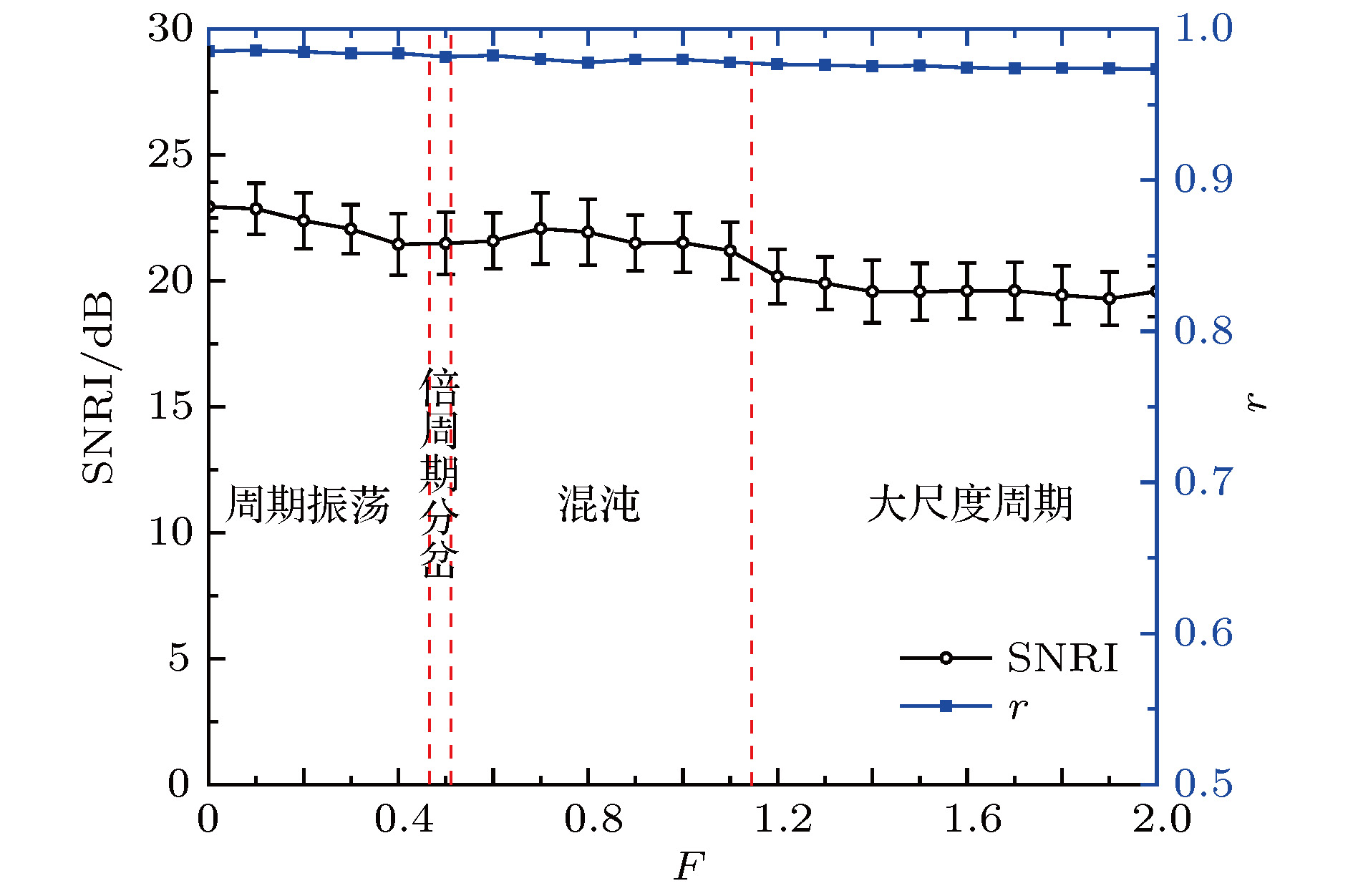 图 3 SNRI和r与周期驱动力幅值F (相态)的关系
图 3 SNRI和r与周期驱动力幅值F (相态)的关系Figure3. SNRI and r versus the periodic driving force amplitude F (states of phase-space)
另外, 对系统初始值引起的相态变化也进行了研究, 得到的结果与上述结论相似, 这说明强耦合Duffing振子在实际使用时几乎不受初始值的限制.
2
4.2.驱动力周期$\omega $
驱动力周期

下面对该参数的设置进行分析, 首先设定系统其他参数与初始值为默认值. 计算






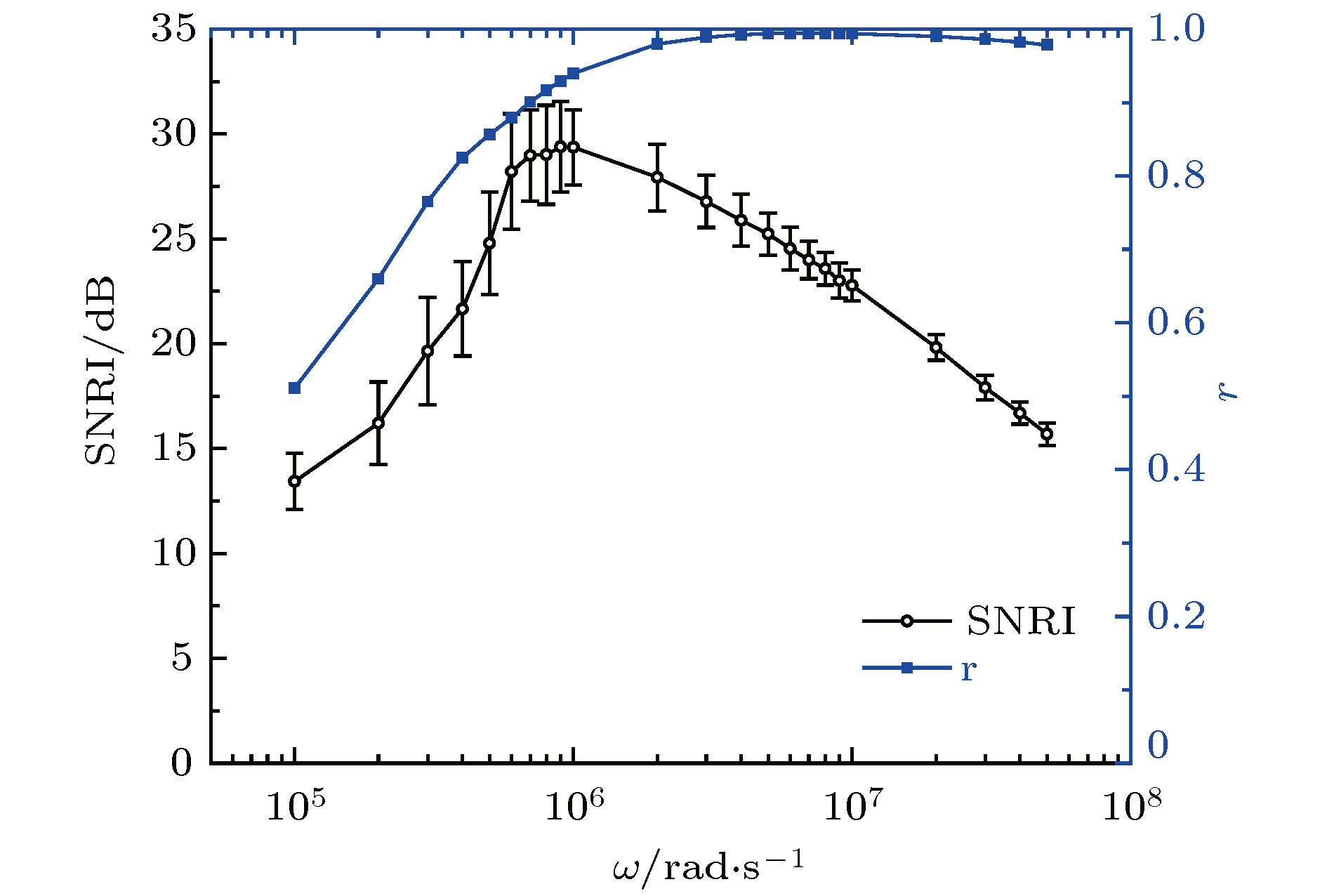 图 4 SNRI和r与驱动力周期
图 4 SNRI和r与驱动力周期
Figure4. SNRI and r versus the driving force period

2
4.3.耦合系数k
耦合系数的作用在于将被测信号s(t)对振子1的作用耦合到振子2中去. 由该模型的检测机理可知, 耦合系数越大, 检测效果和波形恢复效果越好. 当耦合系数k = 0时, 两振子之间不存在耦合作用. 当0 < k < 1时, 两振子间的耦合属于弱耦合, 被测脉冲信号在振子1中引起的突变难以耦合到振子2中, 以至于变量差分后的结果几乎被噪声淹没, 检测失效; 当1 < k < 10时, 振子耦合强度逐渐增大, 振子2因s(t)产生的突变也逐步增大, 信噪比改善逐渐提高, 波形相似度也逐渐达到最优; 当k > 10时, 耦合系数的影响趋于固定. 设定系统其他参数与初始值, 在
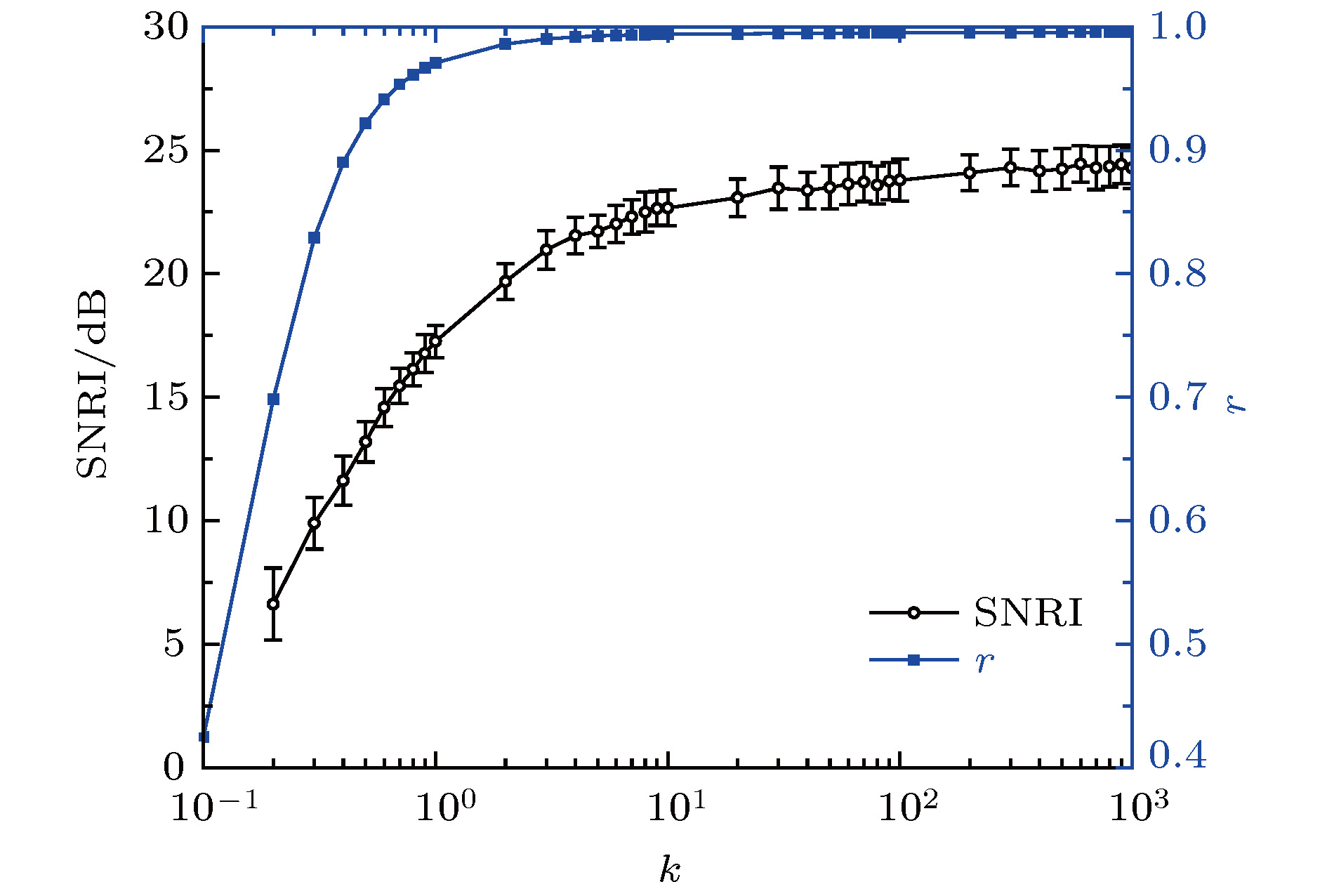 图 5 SNRI和r与耦合系数k的关系
图 5 SNRI和r与耦合系数k的关系Figure5. SNRI and r versus the coupling coefficient k
2
4.4.阻尼系数$\xi$
设定系统其他参数与初始值, 对系统相图进行分析, 结果显示, 在小阻尼系数时



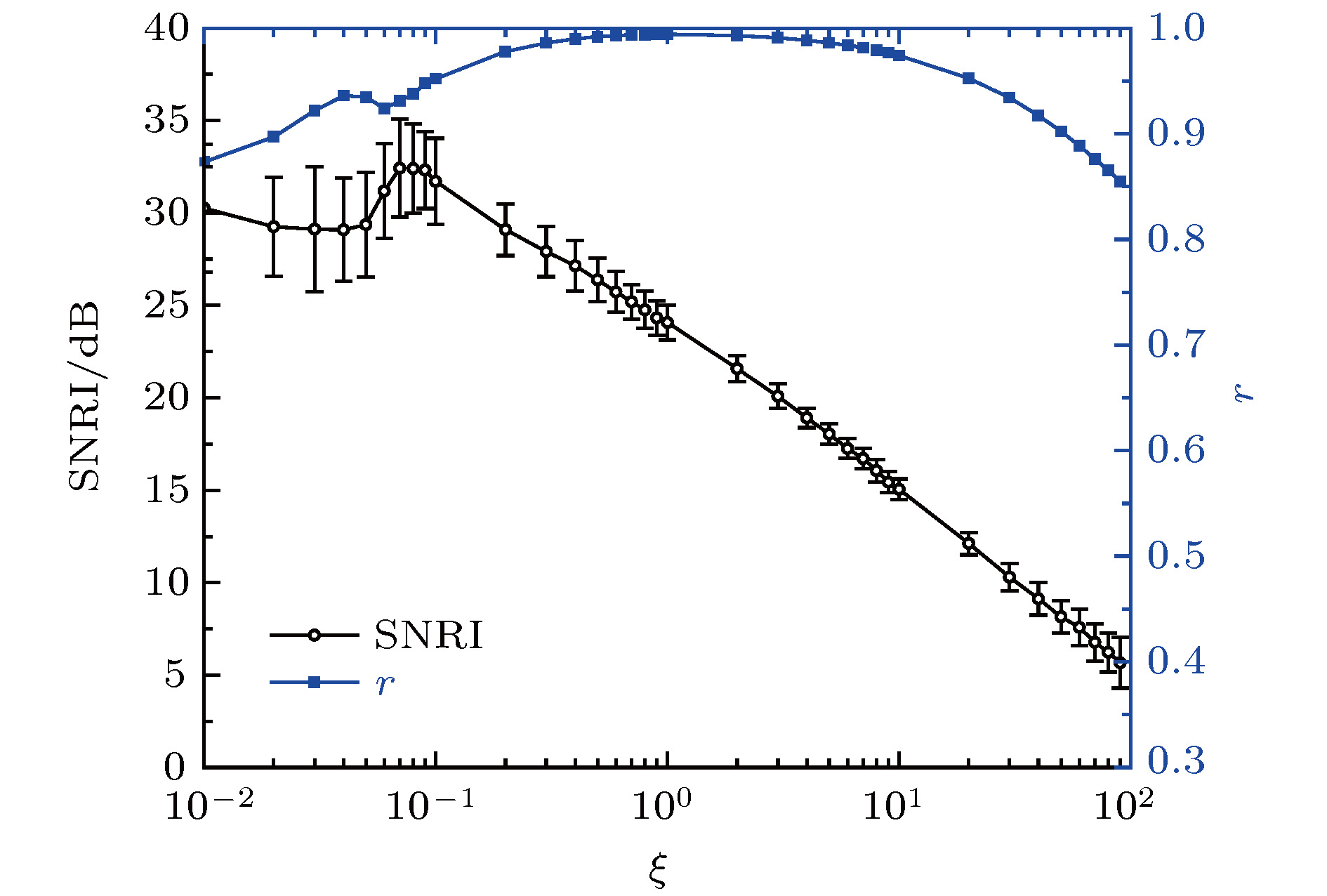 图 6 SNRI和r与阻尼系数
图 6 SNRI和r与阻尼系数
Figure6. SNRI and r versus the damping coefficient

2
4.5.计算步长
计算步长在很大程度上决定了计算的精度, 计算步长越小计算精度越高, 但同时计算量越大. 下面利用不同的计算步长对Duffing方程进行求解, 以观察计算步长对检测效果的影响. 设定计算步长分别20, 10, 5, 2, 1 ns, 则输入信号采样率对应为50, 100, 200, 500, 1000 MHz. 100次实验检测结果的SNRI和波形相似度r统计值与计算步长的关系如图7所示, SNRI和r均随着计算步长减小而增加, 这与前面的分析一致. 所以在Duffing系统运算能力允许时, 应尽可能采用较小的计算步长(较高的采样率).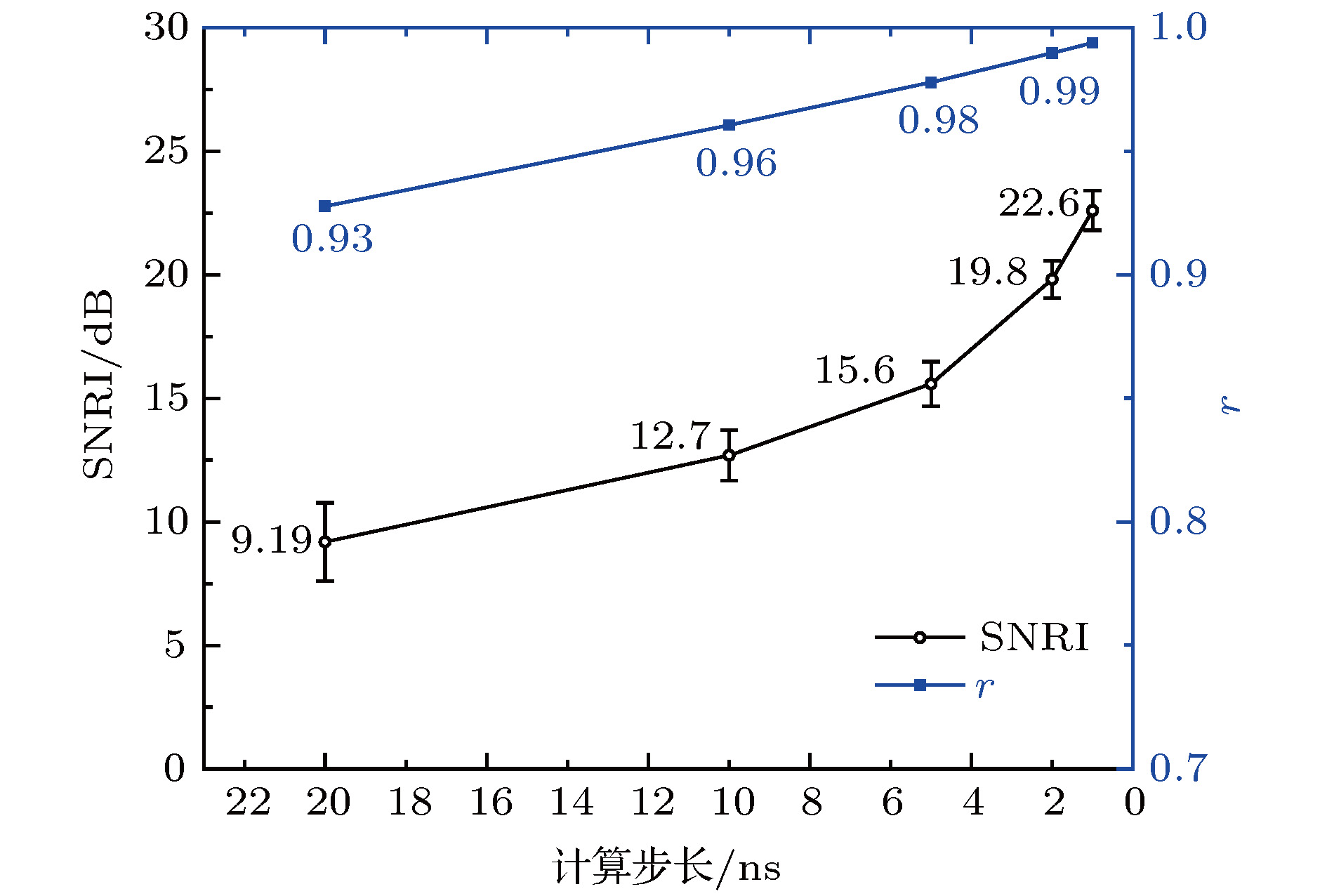 图 7 SNRI和r与不同计算步长的关系
图 7 SNRI和r与不同计算步长的关系Figure7. SNRI and r versus different calculation steps
5.1.微弱脉冲信号检测
在前面强耦合Duffing振子原理与参数分析的过程中, 分别使用了三角脉冲和高斯脉冲作为被检测波形, 分析结果显示输出信噪比得到了有效改善, 波形相似度也很高. 下面利用强耦合Duffing振子对三种波形信号进行不同信噪比条件下的检测. 其中,
检测成功的判据为: 输出信号脉冲幅度a大于5倍噪声均方差(输出信号信噪比大于7.96 dB). 设置该判据的原因在于, 在标准正态分布中, 样本大于5σ的概率为2.85 × 10–6, 即一百万个数据点会有2.85个误判. 假设一次事件包含104个数据点, 那么对事件的误判率将小于3%, 实践证明该判据用于脉冲检测是一种可靠的判据.
根据第4节的分析结果, 检测不同时域特征脉冲信号时需要设置不同的振子参数, 三种被测信号的波形特征及部分参数如表2所列, 其他参数取表1中默认值, 系统初始值同样取默认值.
| 脉冲类型 | 波形时域特征 | Duffing振子参数 |
| 方波 | 上升时间0.1 ms | $\omega = 50$ rad/s |
| 半高宽1 s | 计算步长0.1 ms | |
| 双指数脉冲 | 上升时间3 ${\text{μs}}$ | $\omega = 5 \times {10^5}$ rad/s |
| 半高宽25 ${\text{μs}}$ | 计算步长10 ns | |
| 高斯导数脉冲 | 上升时间1.5 ${\text{μs}}$ | $\omega = 4 \times {10^6}$ rad/s |
| 峰峰宽1.45 ${\text{μs}}$ | 计算步长1 ns |
表2波形特征及部分振子参数
Table2.Waveform characteristics and partial oscillator parameters
背景固定为方差0.1的高斯白噪声, 通过调节脉冲信号幅度a, 将输入信噪比设置在区间[–20, –10] dB, 间隔1 dB, 100次实验的检测概率和波形相似度均值如表3所列. 可以看出, 三种波形的检测概率和波形相似度同时大于0.9的输入信噪比门限分别为–15, –12和–16 dB.
| 脉冲类型 | 输入信噪比/dB | –20 | –19 | –18 | –17 | –16 | –15 | –14 | –13 | –12 | –11 | –10 |
| 方波 | 检测概率/% | 14.0 | 21.5 | 41.5 | 60.5 | 78.0 | 91.5 | 99.0 | 100 | 100 | 100 | 100 |
| 波形相似度r | 0.88 | 0.90 | 0.92 | 0.93 | 0.94 | 0.95 | 0.96 | 0.97 | 0.97 | 0.98 | 0.98 | |
| 双指数脉冲 | 检测概率/% | 0.5 | 4.5 | 5.5 | 10.0 | 23.5 | 51.0 | 67.5 | 87.5 | 95.5 | 100 | 100 |
| 波形相似度r | 0.67 | 0.71 | 0.74 | 0.78 | 0.81 | 0.84 | 0.86 | 0.88 | 0.90 | 0.91 | 0.92 | |
| 高斯导数脉冲 | 检测概率/% | 37.5 | 55.0 | 73.0 | 86.5 | 94.0 | 99.5 | 100 | 100 | 100 | 100 | 100 |
| 波形相似度r | 0.85 | 0.87 | 0.88 | 0.89 | 0.90 | 0.91 | 0.92 | 0.92 | 0.93 | 0.93 | 0.93 |
表3强耦合Duffing振子检测结果
Table3.Detection results of strongly coupled Duffing oscillators
2
5.2.微弱脉冲信号参数估计
强耦合Duffing振子对目标信号的检测是基于时域的, 由于检测结果


| 脉冲类型 | 输入信噪比/dB | –16 | –15 | –14 | –13 | –12 | –11 | –10 |
| 方波 | 真实值 | — | 0.1125 | 0.1262 | 0.1416 | 0.1589 | 0.1783 | 0.2000 |
| 估计值 | — | 0.1114 | 0.1304 | 0.1375 | 0.1641 | 0.1761 | 0.1943 | |
| 误差/% | — | –0.98 | 3.34 | –2.90 | 3.29 | –1.24 | –2.85 | |
| MSE/10–4 | — | 1.26 | 1.43 | 0.75 | 2.04 | 1.23 | 2.49 | |
| 双指数脉冲 | 真实值 | — | — | — | — | 0.1589 | 0.1783 | 0.2000 |
| 估计值 | — | — | — | — | 0.1586 | 0.1773 | 0.2032 | |
| 误差/% | — | — | — | — | –0.16 | –0.55 | 1.62 | |
| MSE/10–4 | — | — | — | — | 2.79 | 6.43 | 5.03 | |
| 高斯导数脉冲 | 真实值 | 0.1002 | 0.1125 | 0.1262 | 0.1416 | 0.1589 | 0.1783 | 0.2000 |
| 估计值 | 0.1039 | 0.1180 | 0.1297 | 0.1423 | 0.1595 | 0.1807 | 0.1960 | |
| 误差/% | 3.74 | 4.93 | 2.78 | 0.52 | 0.41 | 1.35 | –2.02 | |
| MSE/10–4 | 0.29 | 0.89 | 0.79 | 1.60 | 0.82 | 1.46 | 0.71 |
表4脉冲信号幅值估计结果
Table4.Estimation results of pulse signals amplitude
| 脉冲类型 | 输入信噪比/dB | –16 | –15 | –14 | –13 | –12 | –11 | –10 |
| 方波 | 真实值/s | — | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 | 1.0000 |
| 估计值/s | — | 1.0011 | 0.9988 | 0.9941 | 0.9984 | 0.9972 | 0.9986 | |
| 误差/% | — | 0.11 | –0.12 | –0.59 | –0.16 | –0.28 | –0.14 | |
| MSE/10–4 | — | 1.40 | 1.11 | 0.57 | 0.13 | 0.56 | 0.45 | |
| 双指数脉冲 | 真实值/${\text{μ}}{\rm s}$ | — | — | — | — | 25 | 25 | 25 |
| 估计值/${\text{μ}}{\rm s}$ | — | — | — | — | 25.22 | 24.79 | 24.68 | |
| 误差/% | — | — | — | — | 0.89 | –0.84 | –1.27 | |
| MSE | — | — | — | — | 15.8 | 3.8 | 7.7 | |
| 高斯导数脉冲 | 真实值/${\text{μ}}{\rm s}$ | 1.45 | 1.45 | 1.45 | 1.45 | 1.45 | 1.45 | 1.45 |
| 估计值/${\text{μ}}{\rm s}$ | 1.38 | 1.52 | 1.52 | 1.47 | 1.48 | 1.52 | 1.46 | |
| 误差/% | –5.02 | 4.99 | 4.61 | 1.43 | 2.37 | 4.49 | 0.34 | |
| MSE | 0.011 | 0.023 | 0.017 | 0.032 | 0.024 | 0.003 | 0.012 |
表5脉冲信号宽度估计结果
Table5.Estimation results of pulse signals width


对脉冲幅值和宽度的估计结果表明, 在信噪比门限之上, 强耦合Duffing振子对脉冲波形的恢复效果较好, 误差基本在5%以内, MSE表明结果的一致性也很好. 图8、图9、图10分别为三种脉冲波形在各自信噪比检测门限处的恢复效果.
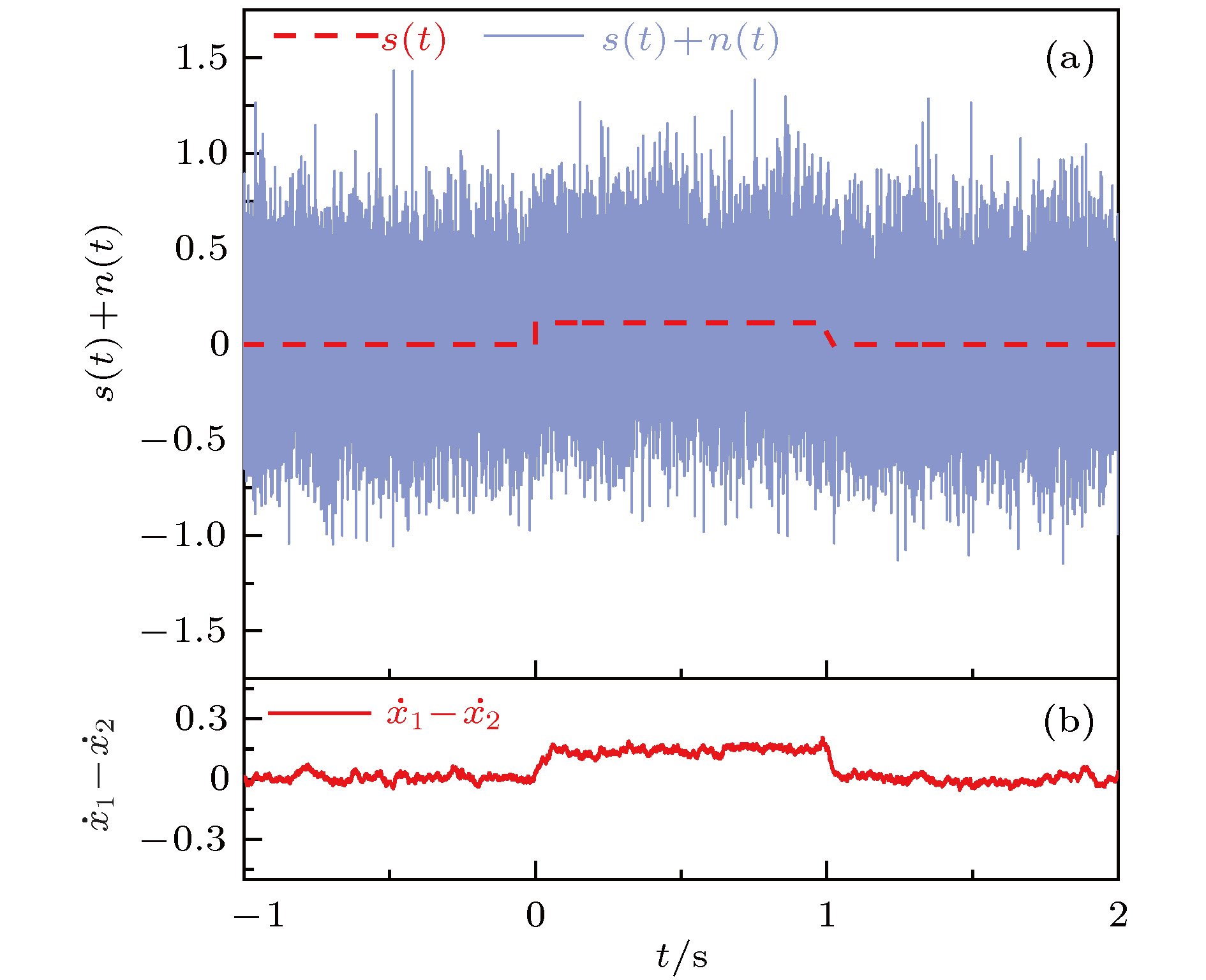 图 8 检测信噪比–15 dB的方波信号 (a)输入信号; (b)输出信号
图 8 检测信噪比–15 dB的方波信号 (a)输入信号; (b)输出信号Figure8. Detection of square wave signal with SNR of –15 dB: (a) Input signal; (b) output signal
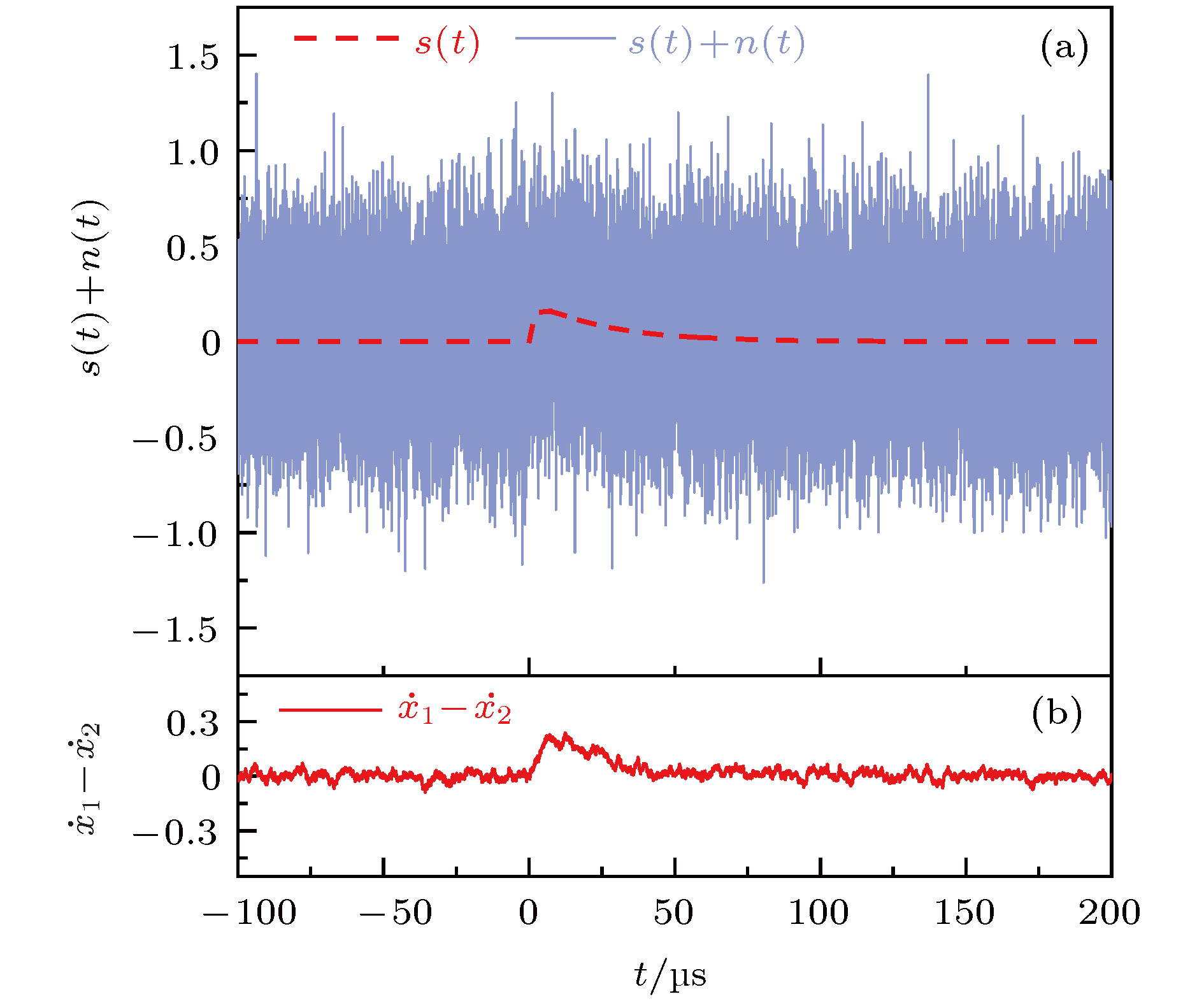 图 9 检测信噪比–12 dB的双指数脉冲 (a)输入信号; (b)输出信号
图 9 检测信噪比–12 dB的双指数脉冲 (a)输入信号; (b)输出信号Figure9. Detection of double exponential pulse with SNR of –12 dB: (a)Input signal; (b) output signal
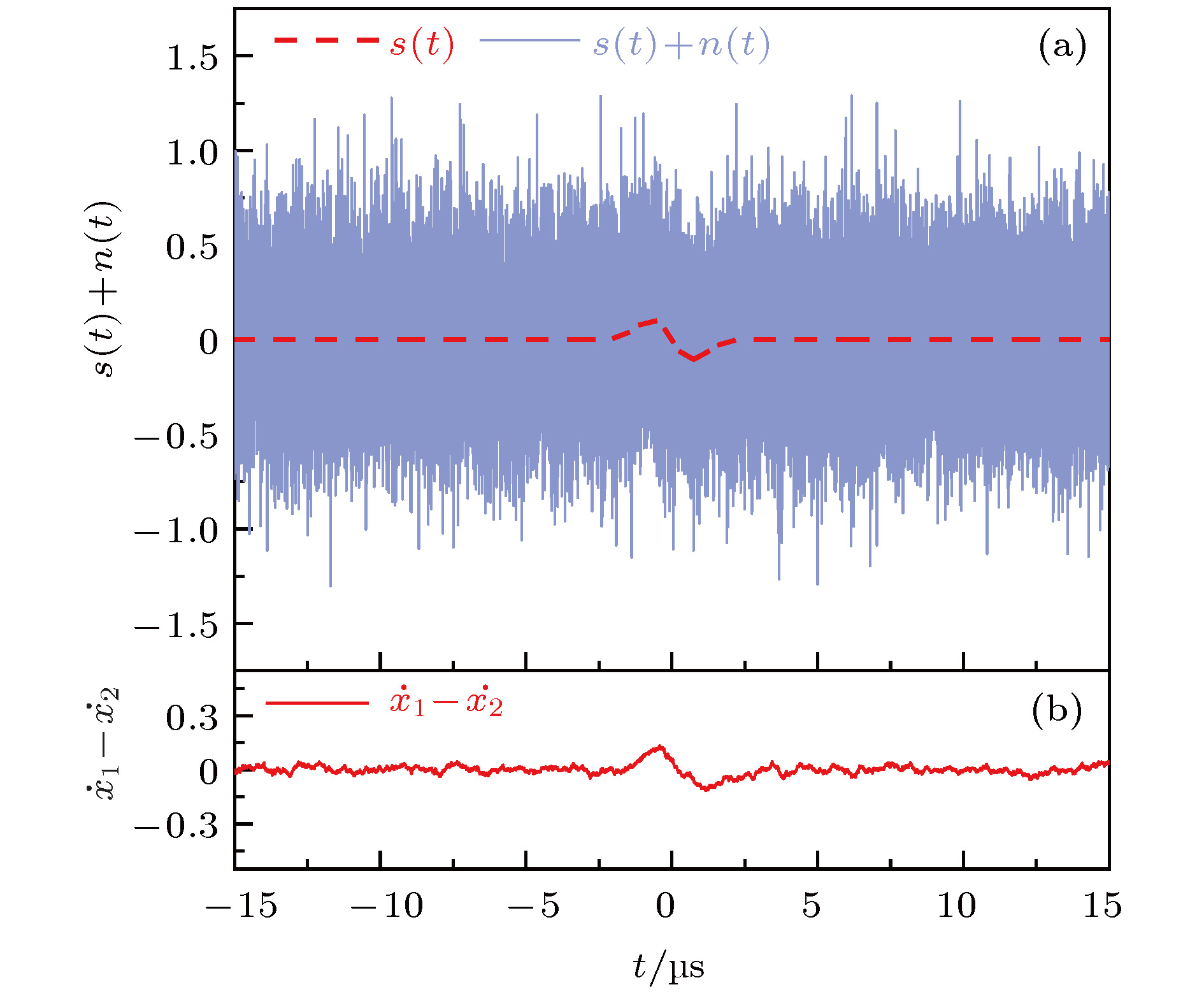 图 10 检测信噪比–16 dB的高斯导数脉冲 (a)输入信号; (b)输出信号
图 10 检测信噪比–16 dB的高斯导数脉冲 (a)输入信号; (b)输出信号Figure10. Detection of Gaussian derivative pulse with SNR –16 dB: (a) Input signal; (b) output signal
从三种波形的恢复效果可以看出: 噪声得到了很好的抑制, 波形整体畸变较小, 幅值、脉宽等时域信息均能在恢复结果中体现; 系统能够检测和恢复正负交替的脉冲信号; 方波虽然恢复波形在前后沿部分有所变缓, 但波形整体相似性较好, 尤其是平顶部分基本没有畸变; 通过时间尺度变换后系统可以检测和恢复从微秒级至秒级的脉冲信号, 表明系统不受时间尺度的限制.
2
5.3.对比实验
下面对弱耦合Duffing振子和强耦合Duffing振子的信号检测和波形恢复情况进行对比. 输入信噪比–10, –12, –14和–16 dB的微弱高斯导数脉冲, 如图11(a)所示. 实验结果表明, 两种方法的信噪比检测门限都能达到–16 dB, 基本处于同一水平, 如图11(b)和图11(c)所示, 但强耦合Duffing振子对脉冲波形的恢复效果明显更好, 并且其稳定性、一致性等要优于弱耦合Duffing振子.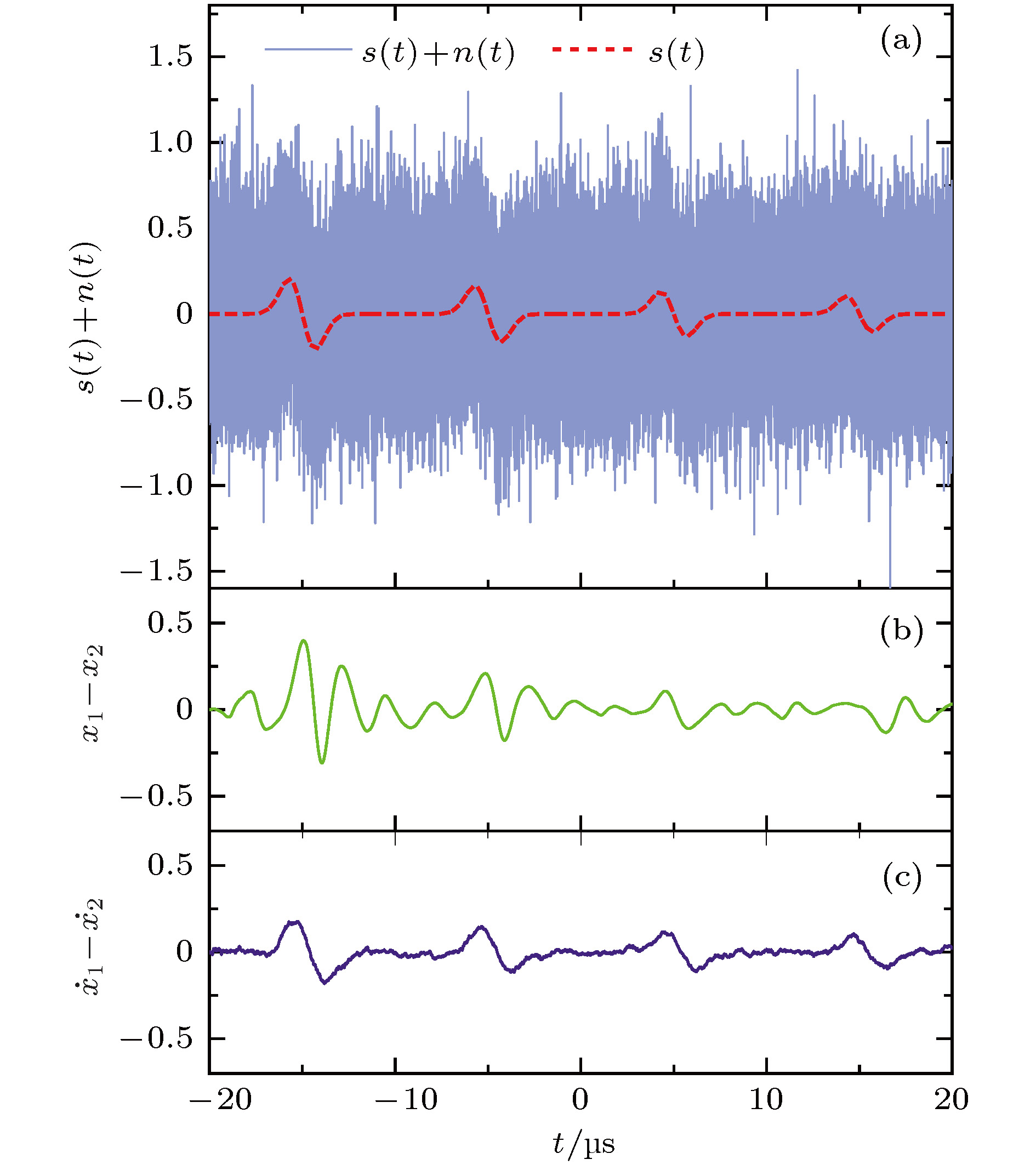 图 11 对比实验结果 (a)输入信号; (b)弱耦合Duffing振子输出信号; (c)强耦合Duffing振子输出信号
图 11 对比实验结果 (a)输入信号; (b)弱耦合Duffing振子输出信号; (c)强耦合Duffing振子输出信号Figure11. Contrast experimental results: input signal (a); output signal of weakly coupled Duffing oscillators (b) and strongly coupled Duffing oscillators (c)
1)利用信噪比改善和波形相似度对强耦合Duffing振子参数进行分析, 结果表明优化后系统对微弱脉冲信号的信噪比增益可达20 dB以上;
2)强耦合Duffing振子处于任何相态时均可工作, 具有可检测脉冲强度变化范围大、可检测脉冲种类多、可检测正负交替的脉冲等特点;
3)该方法不受时间尺度的限制, 只需调节驱动力周期, 即可检测不同时间尺度的脉冲信号;
4)由于该方法对系统初始状态不敏感, 因此有利于执行分段并行计算, 这对脉冲信号的实时检测应用非常重要.
该方法受计算步长的影响较大, 对采样率的要求较高, 另外本文研究的背景噪声仅限高斯白噪声, 其他噪声对系统检测性能的影响有待进一步研究.
