Fund Project:Project supported by the National Defense Pre-Research Foundation of China (Grant No. 6140518030108) and the Research Foundation of National University of Defense Technology, China (Grant No. ZK17-02-05).
Received Date:10 March 2019
Accepted Date:23 May 2019
Available Online:01 September 2019
Published Online:20 September 2019
Abstract:Long wavelength results in the low radiation efficiency of a portable conventional antenna operating at very low frequency (VLF) and below. This has motivated one to develop an innovative approach to design an electrically small antenna in a frequency band lower than VLF. The time-varying electromagnetic fields can be generated by spinning a permanent magnet. In this way, the mechanical energy is converted to the electromagnetic energy, and the impedance matching networks with nonnegligible insertion loss are not required. Therefore, this mechanical antenna with spinning magnet can improve radiation efficiency in a low frequency band. In this paper, we give the detailed analysis procedure for the spinning magnet, which is seldom discussed in other published reports. In order to analyze the electromagnetic characteristics of the spinning magnet, in this paper we use the ampere return circuit theorem to investigate the equivalent relation between a spinning magnet and the orthogonal magnetic dipole. We introduce an initial spinning angle of the magnet into the dyadic green’s function. With this modification, we provide the rigorous analytic formula for field computation of the orthogonal magnetic dipole. Thus the electromagnetic characteristics of the spinning magnet and spinning magnet array can also be analyzed. For a spinning NdFeB magnet with a magnetization of Br = 0.8 T and a volume of Vr = 270 cm3 as well as 9600 revolutions per minute, the simulation results reveal that the magnetic field of 15 fT at 1 km in air space can be obtained. But the magnetic field of the spinning magnet decreases quickly to 1 fT at 250 m in sea water. Considering the potential demand for increasing the field strength in the near field region, we recommend to use a magnet array with small-sized elements. The magnet array can be used to control the near field pattern. We take two magnets as an example for studying the performance. It can be found from the simulation results that the magnetic near field is increased by 3 dB with the linear magnet array consisting of two elements. With the initial spinning angle of the magnet element adjusted, the near field pattern of the magnet array can be controlled. This is analogous to beam steering of traditional phased array for high band operation. It can be concluded from our study that the spinning magnet is a possible alternative solution for low frequency small transmitter antenna. Keywords:mechanical antenna/ permanent magnet/ magnetic dipole/ dyadic green function
设图1(a)中NdFeB永磁体的表面束缚电流密度${J_{\rm{m}}}=624259$ A/m, 该数值根据文献[18]中的测试数据及公式经计算获得, 由${J_{\rm{m}}} = {B_{\rm{r}}}/{\mu _0}$, 可得NdFeB永磁体的剩余磁感应强度$B_{\rm r} \approx \!$ 0.8 T. 永磁体的a = 30 mm, b = 30 mm, h = 300 mm, 因此体积V = 270 cm3. 将这些参数代入(1a)—(1c)式, 可获得永磁体外部任一点的磁感应强度. 在此基础上, 调整图1(b)中电流环的半径R和电流I, 并代入(2a)—(2c)式, 使两者的磁场分布曲线尽量符合, 从而建立电流环和永磁体之间的等效关系. 本文在永磁体外部选取四条考察基线, 计算磁感应强度Bz分量, 如图2所示. 这里, 取电流环半径R = 170 mm, 电流I = 1700 A. 可见, 在四条基线上, 当距离永磁体超过500 mm后, 两者的计算结果符合很好, 也就是说, 在大于500 mm的距离上, 可以用半径R = 170 mm和电流I = 1700 A的电流环对永磁体进行等效替换. 图1(b)中的电流环即磁偶极子${q_{\rm{m}}}l$, 根据文献[21], ${q_{\rm{m}}}l = {\mu _0}IS$, 电流环面积S = πR2. 图 2 |Bz|随距离的变化(矩形永磁体和理想磁偶极子) (a) y = 0, z = 0, 沿x轴变化; (b) x = 0, z = 160 mm, 沿y轴变化; (c) x = 0, y = 0, 沿z轴变化; (d) x = 0, y = 180 mm, 沿z轴变化 Figure2. Variation of |Bz| versus distance (rectangular permanent magnet and ideal magnetic dipole): (a) y = 0, z = 0, along x-axis; (b) x = 0, z = 160 mm, along y-axis; (c) x = 0, y = 0, along z-axis; (d) x = 0, y = 180 mm, along z-axis.
3.旋转永磁体的场分析23.1.空间正交磁偶极子模型 -->
3.1.空间正交磁偶极子模型
如图3(a)所示, 旋转永磁体在xoy平面上绕原点逆时针匀速旋转, 角速度为$\omega $, 初始旋转角为${\phi _0}$. 磁偶极矩随时间的变换关系如下: 图 3 旋转永磁体与旋转磁偶极子的等效 (a) 旋转永磁体; (b) 旋转磁偶极子 Figure3. Schematic illustration of the equivalence between spinning permanent magnet and spinning magnetic dipole: (a) Spinning permanent magnet; (b) spinning magnetic dipole.



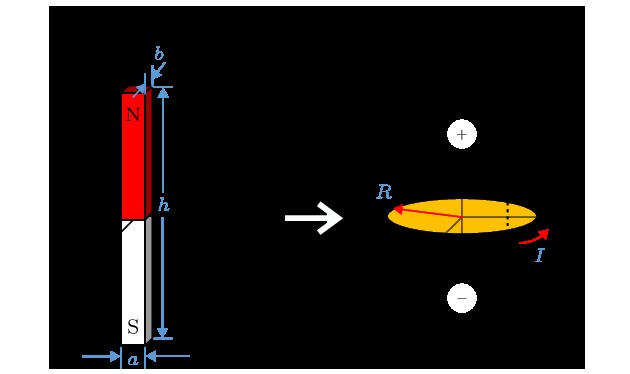 图 1 永磁体和等效磁偶极子坐标示意图 (a) 永磁体; (b) 电流环(磁偶极子)
图 1 永磁体和等效磁偶极子坐标示意图 (a) 永磁体; (b) 电流环(磁偶极子)













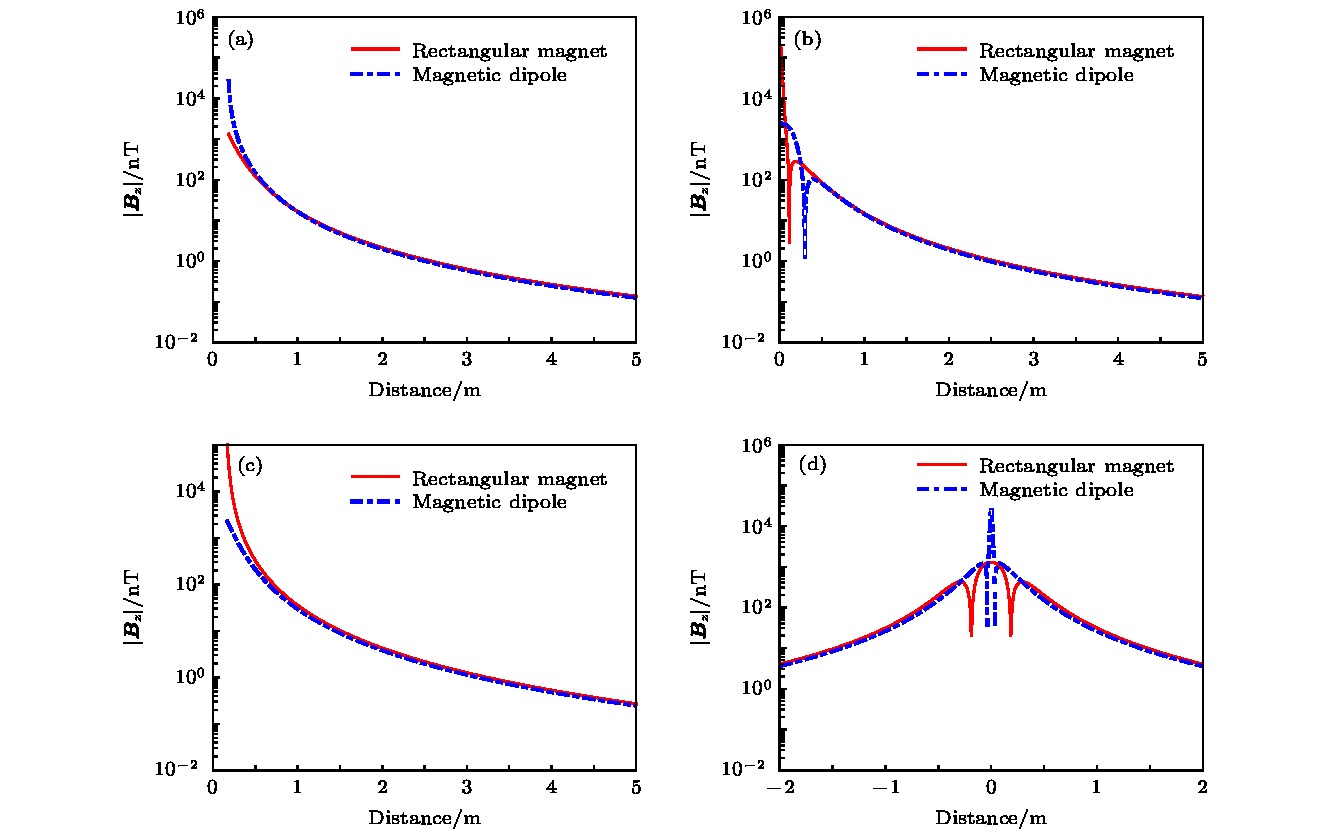 图 2 |Bz|随距离的变化(矩形永磁体和理想磁偶极子) (a) y = 0, z = 0, 沿x轴变化; (b) x = 0, z = 160 mm, 沿y轴变化; (c) x = 0, y = 0, 沿z轴变化; (d) x = 0, y = 180 mm, 沿z轴变化
图 2 |Bz|随距离的变化(矩形永磁体和理想磁偶极子) (a) y = 0, z = 0, 沿x轴变化; (b) x = 0, z = 160 mm, 沿y轴变化; (c) x = 0, y = 0, 沿z轴变化; (d) x = 0, y = 180 mm, 沿z轴变化

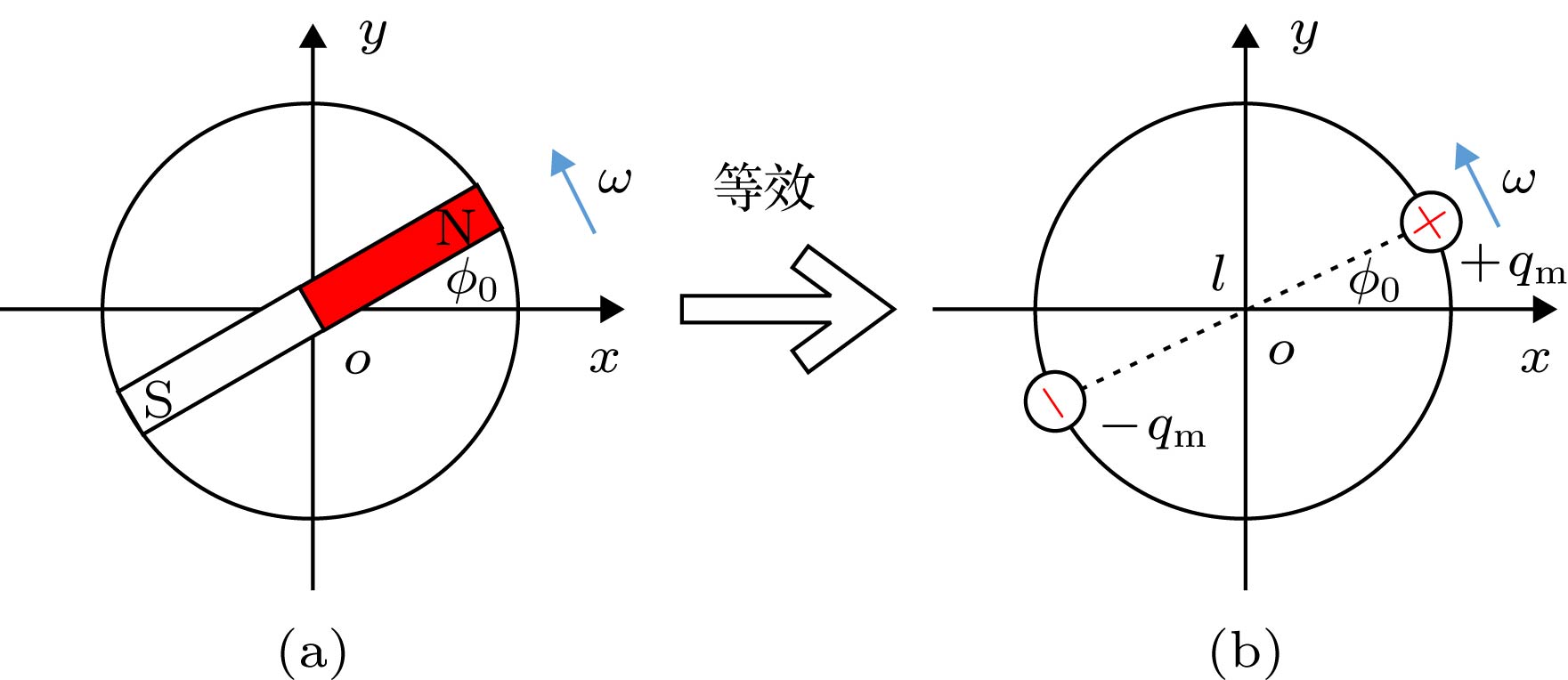 图 3 旋转永磁体与旋转磁偶极子的等效 (a) 旋转永磁体; (b) 旋转磁偶极子
图 3 旋转永磁体与旋转磁偶极子的等效 (a) 旋转永磁体; (b) 旋转磁偶极子



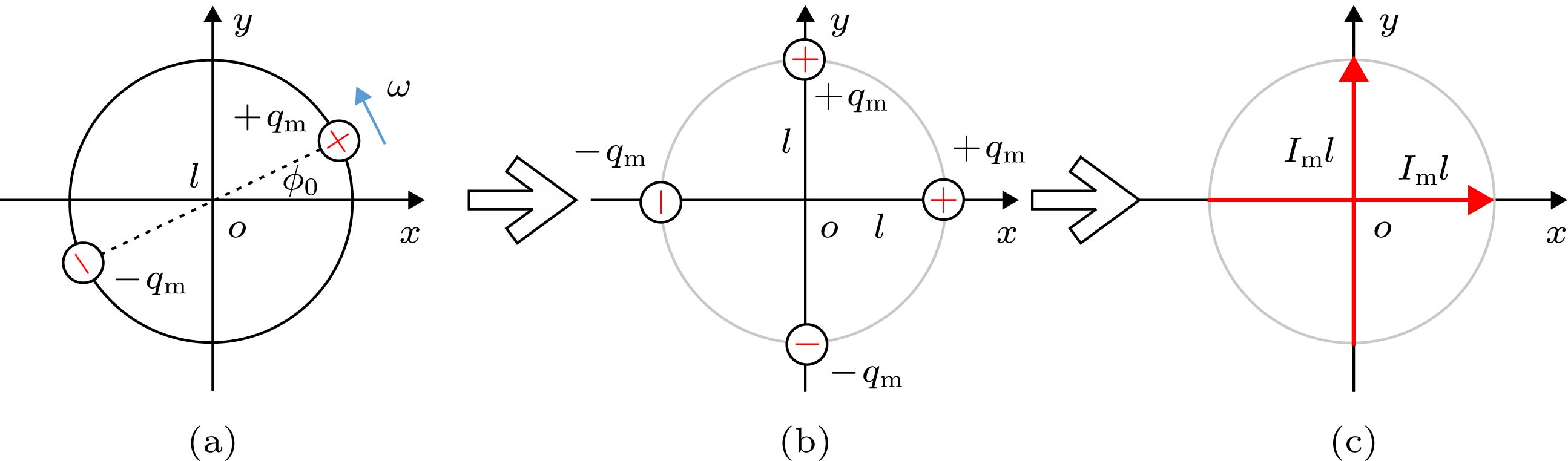 图 4 旋转磁偶极子与正交磁流元的等效关系 (a) 旋转磁偶极子; (b) 正交磁偶极子; (c) 正交磁流元
图 4 旋转磁偶极子与正交磁流元的等效关系 (a) 旋转磁偶极子; (b) 正交磁偶极子; (c) 正交磁流元



 图 5 正交电偶极子的坐标系
图 5 正交电偶极子的坐标系

















 图 6 两种计算方法的结果对比(沿x轴, 球坐标变量为
图 6 两种计算方法的结果对比(沿x轴, 球坐标变量为











 图 7 旋转永磁体的磁感应强度
图 7 旋转永磁体的磁感应强度





 图 8 旋转永磁体磁感应强度的一般变化规律 (a) 160 Hz; (b) 海水
图 8 旋转永磁体磁感应强度的一般变化规律 (a) 160 Hz; (b) 海水







 图 9 旋转永磁体二元阵列
图 9 旋转永磁体二元阵列 图 10 二元旋转永磁体和单个旋转永磁体的场强对比 (a) 沿x轴, 球坐标变量为
图 10 二元旋转永磁体和单个旋转永磁体的场强对比 (a) 沿x轴, 球坐标变量为





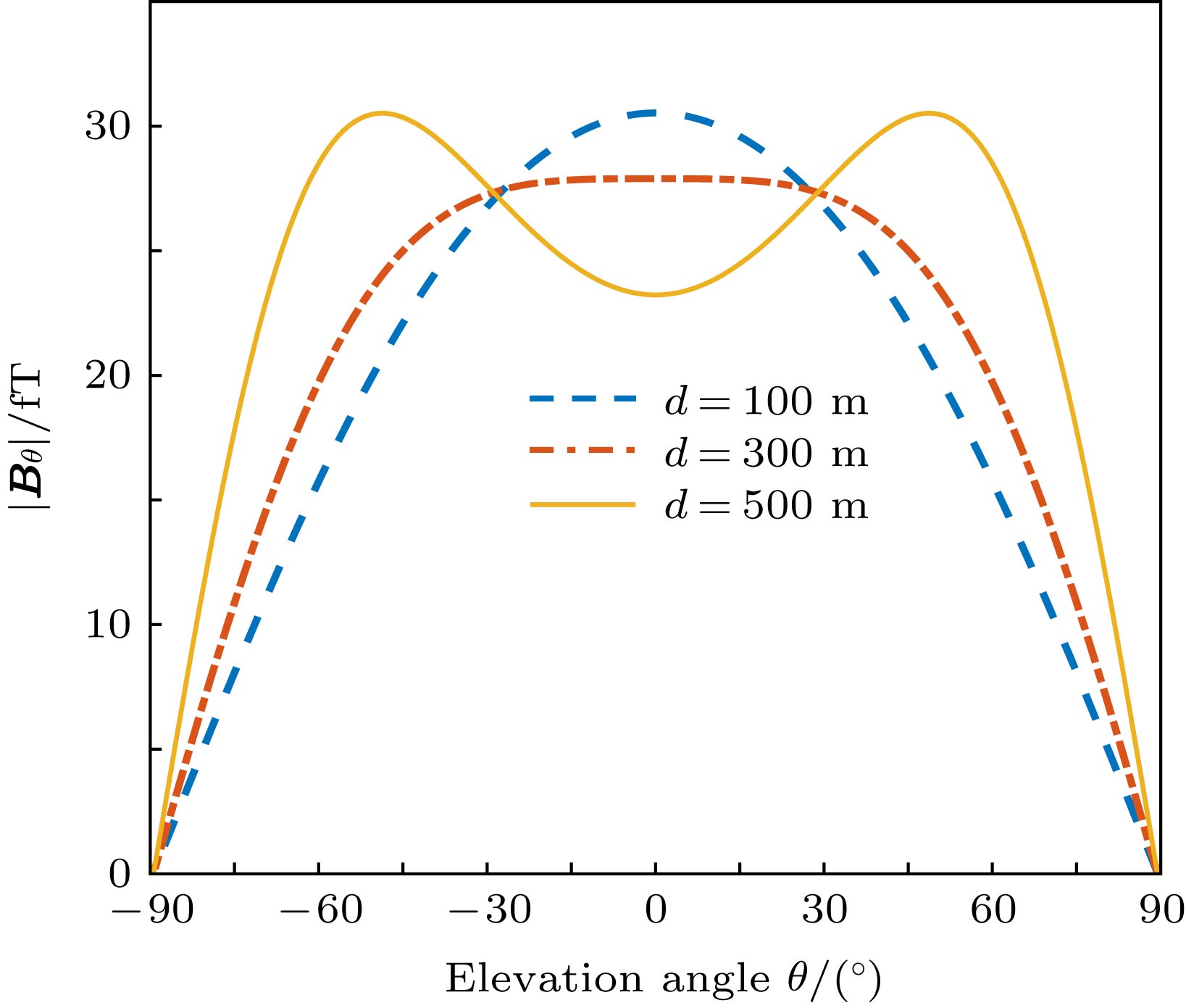 图 11 二元阵列俯仰面磁场分布
图 11 二元阵列俯仰面磁场分布









 图 12 改变初始旋转角, 二元阵列的水平面磁场方向图(a) r = 1000 m; (b) r = 2000 m
图 12 改变初始旋转角, 二元阵列的水平面磁场方向图(a) r = 1000 m; (b) r = 2000 m


