Fund Project:Project supported by the National Natural Science Foundation of China (Grant Nos. 11501495, 51779215), the China Postdoctoral Science Foundation of China (Grant Nos. 2015M581869, 2015T80589), the Natural Science Foundation of Jiangsu Province, China (Grant No. BK20150436), the National Key Technologies Research and Development Program of the Ministry of Science and Technology of China (Grant No. 2015BAD24B02-02), the Top-notch Academic Programs Project of Jiangsu Higher Education Institutions, China (Grant No. PPZY2015B109), and the Undergraduate Research and Innovation Project of Jiangsu Province, China (Grant No. 201611117016Z).
Received Date:29 January 2019
Accepted Date:24 February 2019
Available Online:01 May 2019
Published Online:05 May 2019
Abstract:To improve the numerical accuracy and computational efficiency of solving high-dimensional nonlinear Schr?dinger/Gross-Pitaevskii (NLS/GP) equation by using traditional SPH method, a high-order split-step coupled with a corrected parallel SPH (HSS-CPSPH) method is developed by applying virtual particles to the boundary. The improvements are described as follows. Firstly, the nonlinear Schr?dinger equation is divided into linear derivative term and nonlinear term based on the high-order split-step method. Then, the linear derivative term is solved by extending the first-order symmetric SPH method in explicit time integration. Meanwhile, the MPI parallel technique is introduced to enhance the computational efficiency. In this work, the accuracy, convergence and the computational efficiency of the proposed method are tested by solving the NLS equations with the periodic and Dirichlet boundary conditions, and compared with the analytical solutions. Also, the singularity of solitary waves under the periodic boundary condition is accurately obtained using the proposed particle method. Subsequently, the proposed HSS-CPSPH method is used to predict the results of complex two-dimensional and three-dimensioanl GP problems which are compared with other numerical results. The phenomenon of singular sharp angle in the propagation of nonlinear solitary wave and the process of quantum vortex under Bose-Einstein condensates with external rotation are presented accurately. Keywords:nonlinear Schr?dinger equation/ smoothed particle hydrodynamics/ time split-step/ Bose-Einstein condensates
${A^s}\left(\!\!\!\begin{array}{l}\partial \widehat W {_{ij}^c}/\partial {x_i}\\\partial \widehat W {_{ij}^c}/\partial {y_i}\\\partial \widehat W {_{ij}^c}/\partial {z_i}\end{array}\!\!\!\right) = \left(\!\!\begin{array}{l}{x_{ji}}{W_{ij}}\\{y_{ji}}{W_{ij}}\\{z_{ji}}{W_{ij}}\end{array}\!\!\right).$
图 2${k_{\rm{1}}} = {k_{\rm{2}}} = 4,\;h = {\text{π}}/128$时不同时刻$u\left( {x,{\text{π}}} \right)$的实部沿x轴的变化 (a) t = 0.1; (b) t = 1 Figure2. Curve of the $\operatorname{Re} \left( {u\left( {x,{\text{π}}} \right)} \right)$ along x-axis at different time with ${k_{\rm{1}}} = {k_{\rm{2}}} = 4,\;h = {\text{π}}/128$: (a) t = 0.1; (b) t = 1.
表1${k_{\rm{1}}} = {k_{\rm{2}}} = 1,h = {\text{π}}/64$时几个不同时刻里两种方法的误差${e_{\rm{m}}}$ Table1.Error ${e_{\rm{m}}}$ obtained using two different methods at different time (${k_{\rm{1}}} = {k_{\rm{2}}} = 1,h = {\text{π}}/64$).
$h = {\text{π}}/32$
$h = {\text{π}}/64$
$h = {\text{π}}/128$
${e_{\rm{m}}}$
$o{r_{\rm{\alpha }}}$
${e_{\rm{m}}}$
$o{r_{\rm{\alpha }}}$
${e_{\rm{m}}}$
$o{r_{\rm{\alpha }}}$
SS-ICPSPH
1.381 × 10–2
—
3.616 × 10–3
1.933
9.0412 × 10–4
2.00
HSS-CPSPH
1.381 × 10–2
—
2.494 × 10–3
2.47
4.498 × 10–4
2.47
表2${k_{\rm{1}}} = {k_{\rm{2}}} = 1$, 时间t = 1时, 两种方法在不同粒子间距下的误差和收敛阶 Table2.Error ${e_{\rm{m}}}$ and convergent order $o{r_{\rm{\alpha }}}$ obtained using two different methods at $t=1$ and different particle distance (${k_1} = {k_2} = 1$).
均匀分布粒子
非均匀分布情形1
非均匀分布情形2
$t = 0.1$
$t = 1$
$t = 0.1$
$t = 1$
$t = 0.1$
$t = 1$
SS-ICPSPH
2.776 × 10–4
3.616 × 10–3
2.944 × 10–4
3.818 × 10–3
3.116 × 10–4
4.082 × 10–3
HSS-CPSPH
2.774 × 10–4
2.494 × 10–3
2.886 × 10–4
2.527 × 10–3
2.967 × 10–4
2.578 × 10–3
表3${k_{\rm{1}}} = {k_{\rm{2}}} = 1,h = {\text{π}}/64$时, 粒子分布均匀或不均匀方式下, 两种方法的误差${e_{\rm{m}}}$ Table3.Error ${e_{\rm{m}}}$ obtained using different methods at different distribution (${k_1} = {k_2} = 1$,$h = {\text{π}}/64$).
表4$h = {\text{π}}/64$时, 三个不同时刻两种方法的最大误差${e_{\rm{m}}}$ Table4.Error ${e_{\rm{m}}}$ obtained using two different methods at three times ($h = {\text{π}}/64$).
$h = {\text{π}}/32$
$h = {\text{π}}/64$
$h = {\text{π}}/128$
${e_{\rm{m}}}$
$o{r_{\rm{\alpha }}}$
${e_{\rm{m}}}$
$o{r_{\rm{\alpha }}}$
${e_{\rm{m}}}$
$o{r_{\rm{\alpha }}}$
SS-ICPSPH
7.553 × 10–3
—
1.828 × 10–3
2.046
4.316 × 10–4
2.082
HSS-CPSPH
4.534 × 10–3
—
8.135 × 10–4
2.476
1.379 × 10–4
2.560
表5t = 1时不同空间步长情况下两种粒子方法的误差和收敛阶 Table5.Error and order of convergence by different methods at t = 1 and different h.
图 7 在3个不同时刻${\left| u \right|^2}$在不同截面上的等值线 (a) $\left( {0,y,z} \right)$截面; (b)$\left( {x,y,0} \right)$截面 Figure7. Contour of ${\left| u \right|^2}$ along different profile at different time: (a) $\left( {0,y,z} \right)$; (b) $\left( {x,y,0} \right)$.
表6粒子数为${161^3}$时, 不同CPU个数下运行到不同步数所需时间(单位: s) Table6.Consumed CPU time (unit: s) of different calculated time step with particle number ${161^3}$ at different CPUs.
粒子数
CPU数量
2
12
24
36
72
${121^3}$
449.55
82.926
45.962
35.000
19.585
${161^3}$
1076.922
198.810
111.90
81.922
47.363
${181^3}$
1558.445
292.711
164.838
120.886
65.437
${201^3}$
2190.921
425.688
235.775
179.856
96.836
表7在不同粒子数下不同CPU个数下, 运行到1000步时平均每步所消耗时间(单位: s) Table7.The average consumed CPU time (unit: s) of calculated time step 1000 with different particle number and different CPUs.
图 9 两个不同时刻下t = 0 (第一列)和t = 0.25 (第二列)三个物理量等值线变化 (a1), (a2) $ {\rm Re} ({u_1}) $; (b1), (b2) ${\rm Im} ({u_1})$; (c1), (c2) $\left| {{u_1}} \right|$ Figure9. Contours of three physical quantities at two different times t = 0 (the first row) and t = 0.25 (the second row): (a1), (a2) $\operatorname{Re} ({u_1})$; (b1), (b2) $\operatorname{Im} ({u_1})$; (c1), (c2) $\left| {{u_1}} \right|$.






























































































































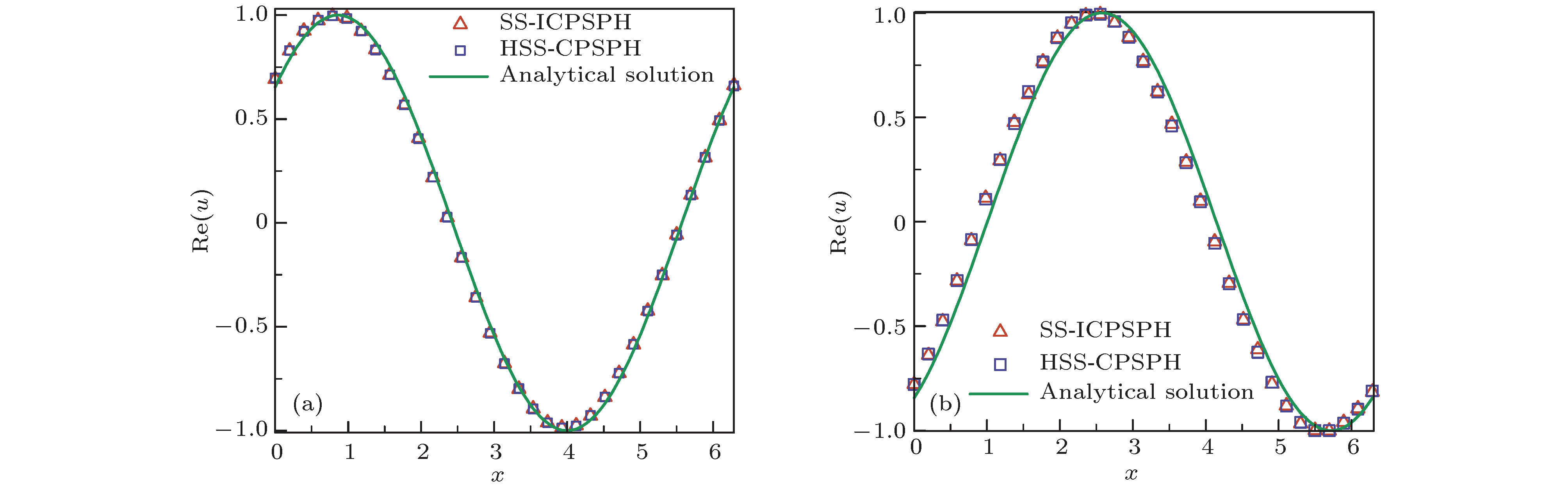 图 1
图 1 







 图 2
图 2 


































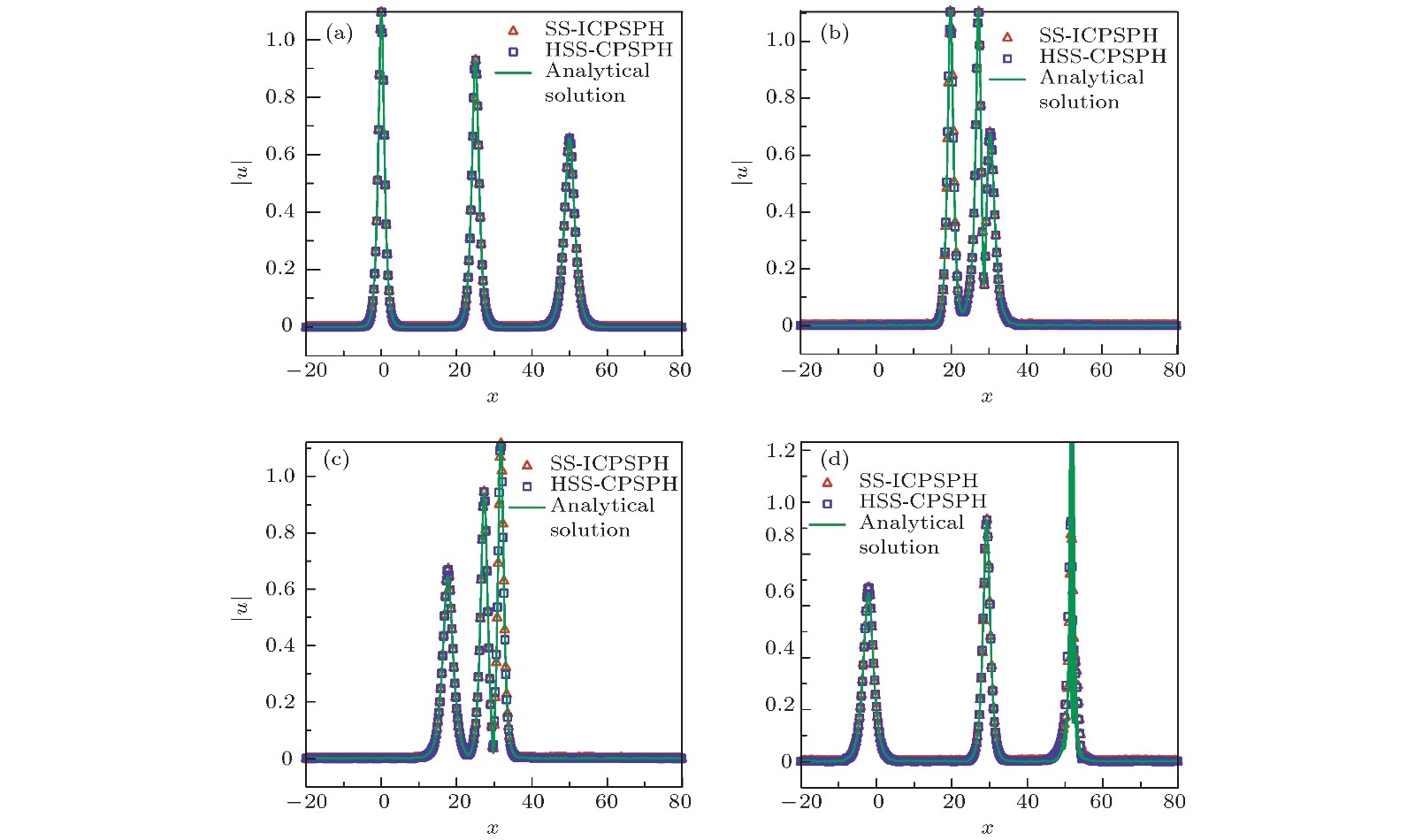 图 4 初始条件2下, 在4个不同时刻三孤立子波函数
图 4 初始条件2下, 在4个不同时刻三孤立子波函数









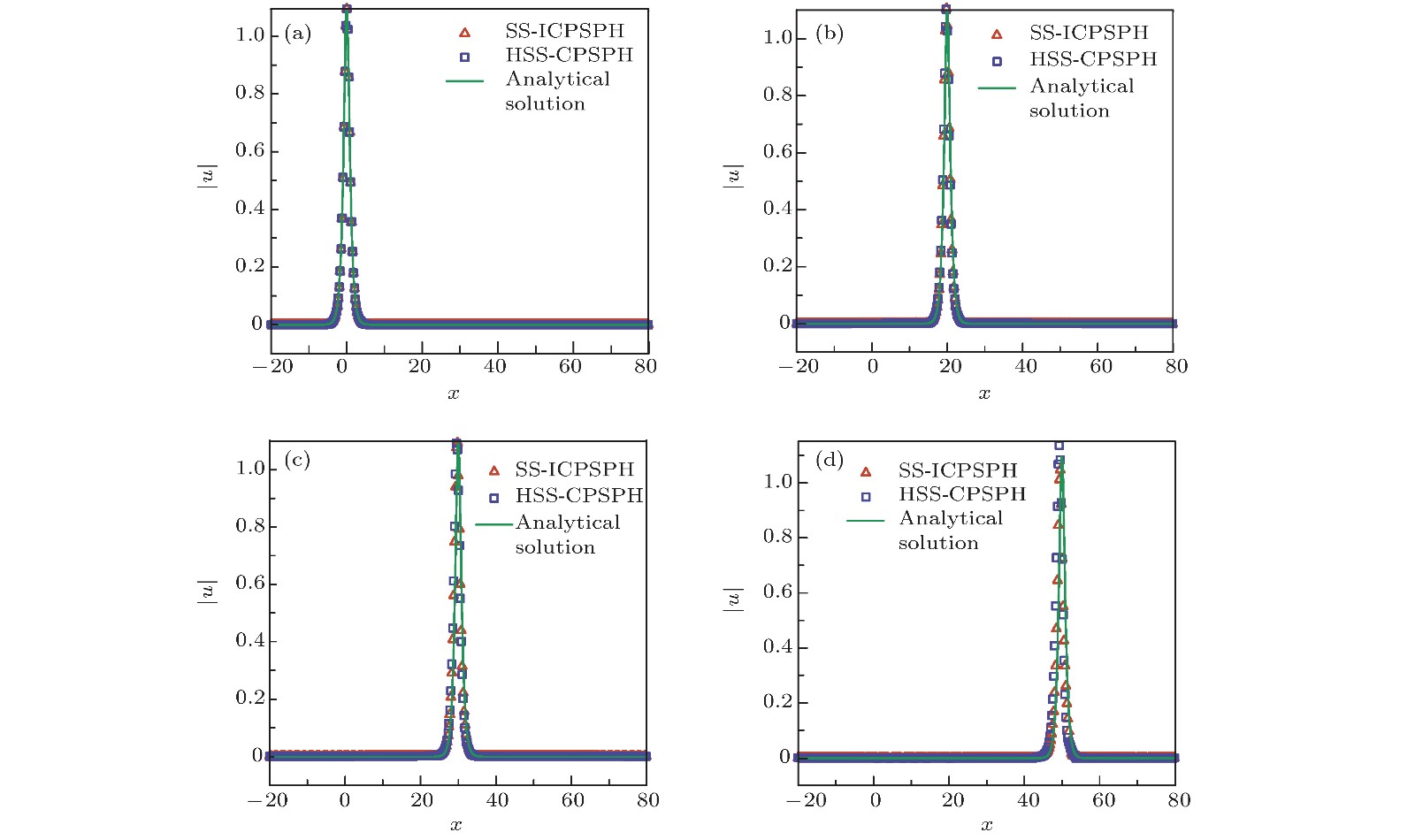 图 3 初始条件1下, 在4个不同时刻孤立波函数
图 3 初始条件1下, 在4个不同时刻孤立波函数




























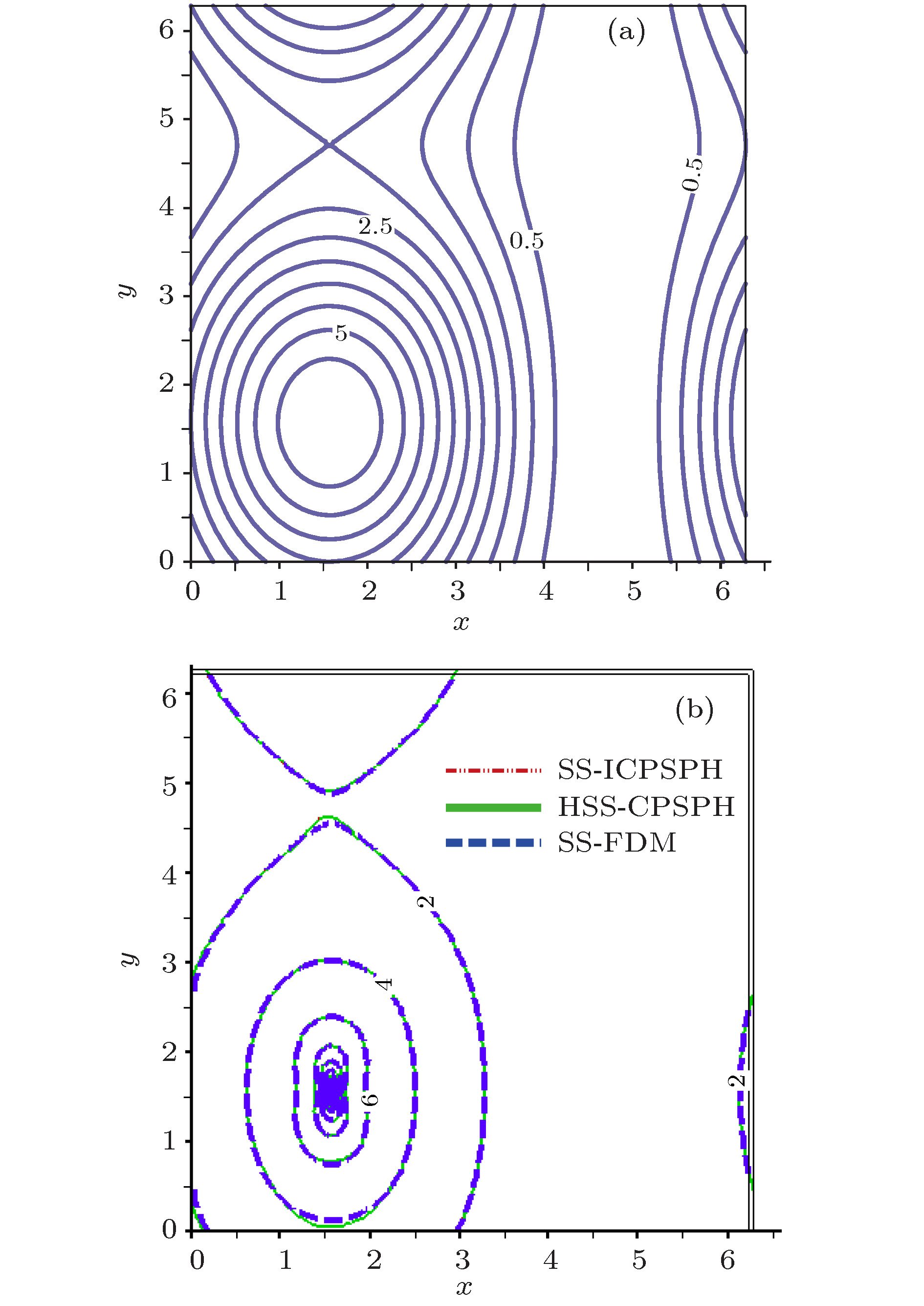 图 5 在两个不同时刻不同数值方法得到的
图 5 在两个不同时刻不同数值方法得到的













 图 6 不同时刻
图 6 不同时刻



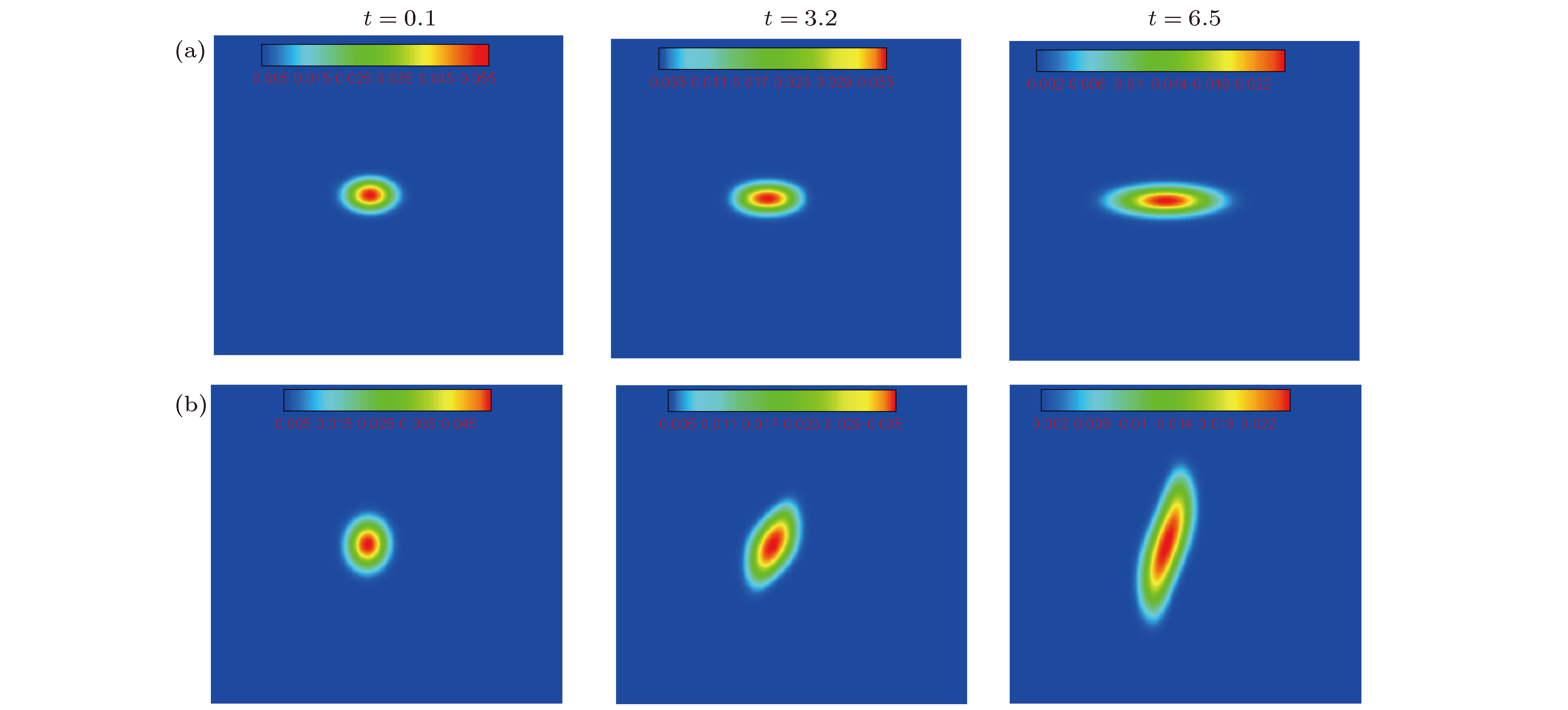 图 7 在3个不同时刻
图 7 在3个不同时刻















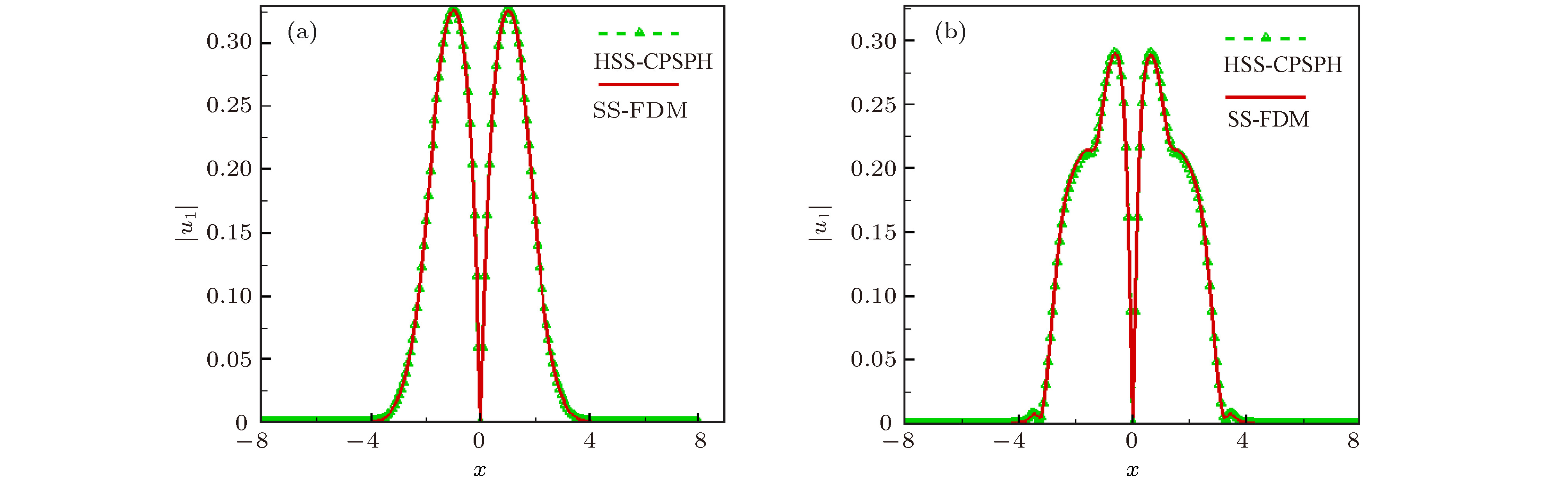 图 8 两个不同时刻下
图 8 两个不同时刻下








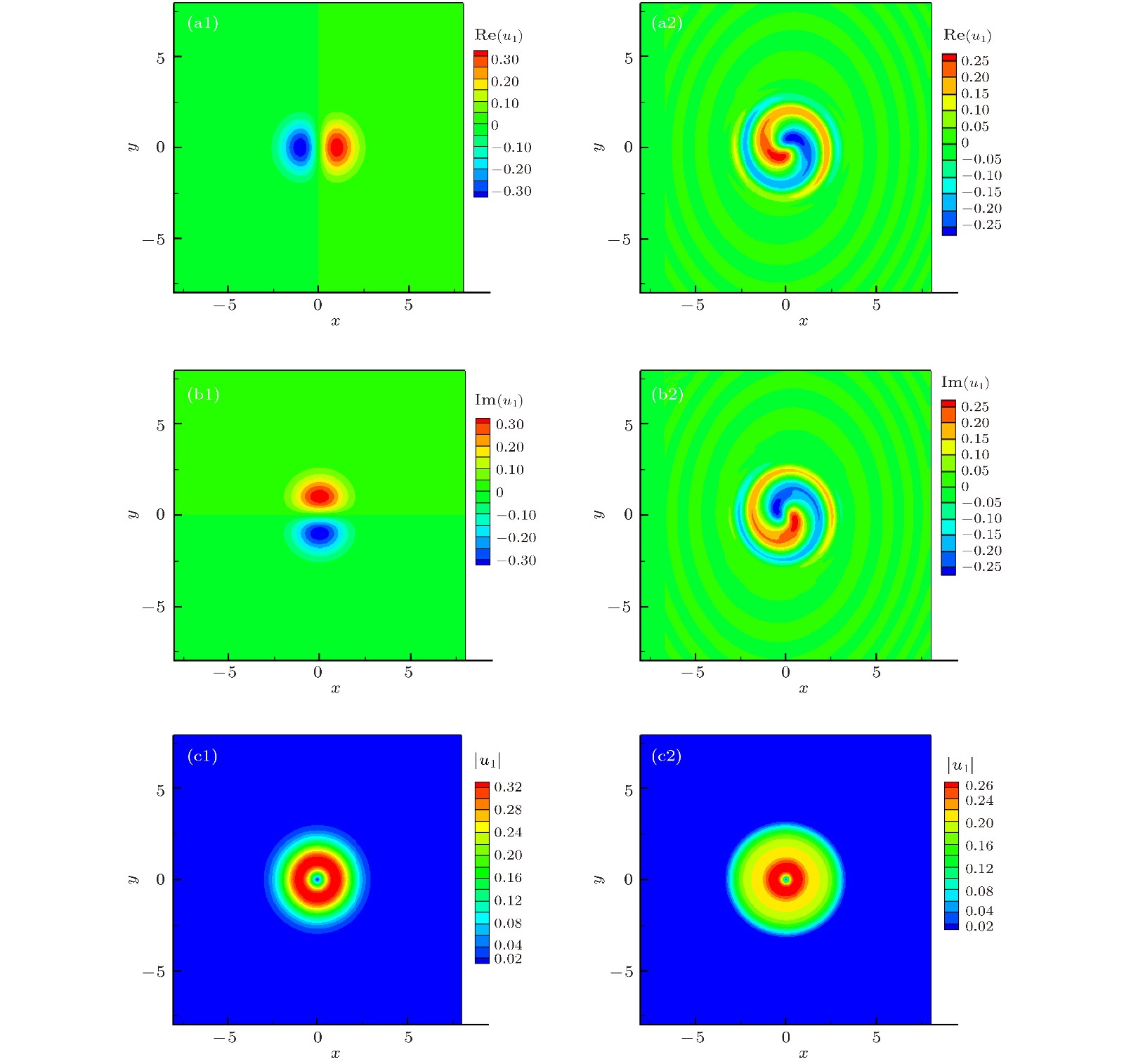 图 9 两个不同时刻下t = 0 (第一列)和t = 0.25 (第二列)三个物理量等值线变化 (a1), (a2)
图 9 两个不同时刻下t = 0 (第一列)和t = 0.25 (第二列)三个物理量等值线变化 (a1), (a2) 





