PARAMETERS OPTIMIZATION OF A DYNAMIC VIBRATION ABSORBER WITH INERTER AND GROUNDED STIFFNESS1)
Sui Peng*, Shen Yongjun,*,?,2), Yang Shaopu*,?*Department of Mechanical Engineering, Shijiazhuang Tiedao University, Shijiazhuang 050043, China ?State Key Laboratory of Mechanical Behavior and System Safety of Traffic Engineering Structures, Shijiazhuang Tiedao University, Shijiazhuang 050043, China
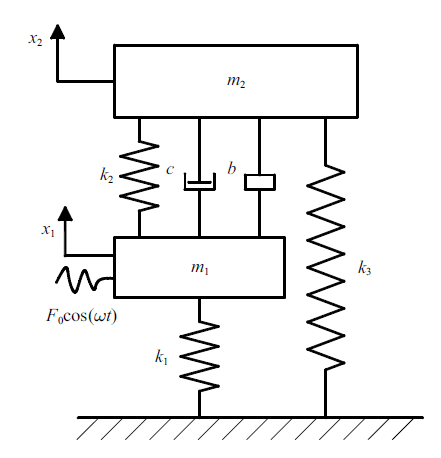
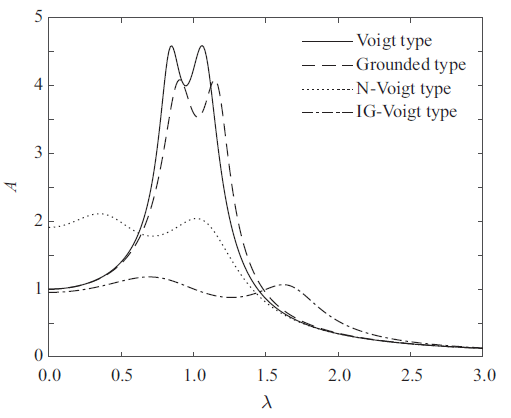
Abstract Most mechanical vibrations are detrimental that not only generate noise but also reduce the service life and operating performance of the equipment. As two common components, grounded stiffness and inerter can change the natural frequency of the system, which has good effect in the field of vibration control. However, most of the current research only focuses on the impact of a single component on the system, and the vibration absorber is gradually difficult to meet the growth of performance demand for vibration control. Based on the typical Voigt-type dynamic vibration absorber, a novel dynamic vibration absorber model with inerter and grounded stiffness is presented. The optimal parameters of the presented model are studied in detail, and the analytical solution of the optimal design formula is derived. First of all, the motion differential equation of the two degree-of-freedom system is established through Newton's second law, and from the system analytical solution it is found that the system has three fixed points unrelated to the damping ratio. The optimal frequency ratio of the dynamic vibration absorber is obtained based on the fixed-point theory. When screening the optimal grounded stiffness ratio, it is found that the inappropriate inerter coefficient will cause the system to generate instability. Then the best working range of the inerter is derived, and finally the optimal grounded stiffness ratio and approximate optimal damping ratio are also obtained. The working condition when the inerter coefficient is not within the best range is discussed, and the suggestions in practical application are given. The correctness of the analytical solution is verified by numerical simulation. Compared with other dynamic vibration absorbers under harmonic and random excitations, it is verified that the presented DVA can greatly reduce the amplitude of the primary system, widen the vibration reduction frequency band, and provide a theoretical basis for the design of new type of DVAs. Keywords:dynamic vibration absorber;inerter;grounded stiffness;parameter optimization
PDF (395KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文 本文引用格式 隋鹏, 申永军, 杨绍普. 一种含惯容和接地刚度的动力吸振器参数优化1). 力学学报, 2021, 53(5): 1412-1422 DOI:10.6052/0459-1879-21-058 Sui Peng, Shen Yongjun, Yang Shaopu. PARAMETERS OPTIMIZATION OF A DYNAMIC VIBRATION ABSORBER WITH INERTER AND GROUNDED STIFFNESS1). Chinese Journal of Theoretical and Applied Mechanics, 2021, 53(5): 1412-1422 DOI:10.6052/0459-1879-21-058
FrahmH. Device for damping vibrations of bodies U.S. Patent 089958, 1909-10-30 [本文引用: 1]
OrmondroydJ, Den HartogJP. The theory of the dynamic vibration absorber Journal of Applied Mechanics, 1928,50:9-22 [本文引用: 2]
Den HartogJP. Mechanical Vibrations New York: McGraw-Hall Book Company, 1947: 112-132 [本文引用: 1]
LiuKF, LiuJ. The damped dynamic vibration absorbers: Revisited and new result Journal of Sound and Vibration, 2005,284(3):1181-1189 DOIURL [本文引用: 3]
ShenYJ, WangL, YangSP, et al. Nonlinear dynamical analysis and parameters optimization of four semi-active on-off dynamic vibration absorbers Journal of Vibration and Control, 2013,19(1):143-160 DOIURL [本文引用: 1]
ShenYJ, AhmadianM. Nonlinear dynamical analysis on four semiactive dynamic vibration absorbers with time delay Shock and Vibration, 2013,20(4):649-663 DOIURL
(LangJun, ShenYongjun, YangShaopu. Parametric optimization and performance comparison for 2 semi-active Voigt DVAs Journal of Vibration and Shock, 2019,38(17):172-177 (in Chinese)) [本文引用: 1]
(XingZikang, ShenYongjun, LiXianghong. Performance analysis of grounded three-element dynamic vibration absorber Chinese Journal of Theoretical and Applied Mechanics, 2019,51(5):1466-1475 (in Chinese)) [本文引用: 1]
(LiHan, ZhangXiaolong, ZhangKai, et al. Optimal parameters design of a ball type dynamic vibration absorber under random excitation Noise and Vibration Control, 2020,40(6):41-45, 72 (in Chinese)) [本文引用: 1]
(BaiShipeng, HouZhichao. Impact of dynamic vibration absorbers on vehicle vertical vibration energy and suspension performances Journal of Vibration and Shock, 2020,39(22):169-174 (in Chinese)) [本文引用: 1]
(ZhangWeihua, LuoRen, SongChunyuan, et al. Hunting control of high-speed train using traction motor as dynamic absorber Journal of Traffic and Transportation Engineering, 2020,20(5):125-134 (in Chinese)) [本文引用: 1]
(LiuXingtian, ChenShuhai, WangJiadeng, et al. Anlysis of the dynamic behavior and performance of a vibration isolation system with geometric nonlinear friction damping Chinese Journal of Theoretical and Applied Mechanics, 2019,51(2):371-379 (in Chinese)) [本文引用: 1]
(ZhangWanjie, NiuJiangchuan, ShenYongjun, et al. Dynamical analysis on a kind of semi-active vibration isolation systems with damping control Chinese Journal of Theoretical and Applied Mechanics, 2020,52(6):1743-1754 (in Chinese)) [本文引用: 2]
AcarMA, YilmazC. Design of an adaptive--passive dynamic vibration absorber composed of a string--mass system equipped with negative stiffness tension adjusting mechanism Journal of Sound and Vibration, 2013,332(2):231-245 DOIURL [本文引用: 1]
(PengHaibo, ShenYongjun, YangShaopu. Parameter optimization of a new type of dynamic vibration absorber with negative stiffness Chinese Journal of Theoretical and Applied Mechanics, 2015,47(2):320-327 (in Chinese)) [本文引用: 1]
(WangXiaoran, ShenYongjun, YangShaopu, et al. Parameter optimization of three-element type dynamic vibration absorber with negative stiffness Journal of Vibration Engineering, 2017,30(2):177-184 (in Chinese))
ShenYJ, PengHB, LiXH, et al. Analytically optimal parameters of dynamic vibration absorber with negative stiffness Mechanical Systems and Signal Processing, 2017,85:192-203
ShenYJ, XingZY, YangSP, et al. Parameters optimization for a novel dynamic vibration absorber Mechanical Systems and Signal Processing, 2019,133:106282 DOIURL [本文引用: 2]
(XingZhaoyang, ShenYongjun, XingHaijun, et al. Parameters optimization of a dynamic vibration absorber with amplifying mechanism and negative stiffness Chinese Journal of Theoretical and Applied Mechanics, 2019,51(3):894-903 (in Chinese)) [本文引用: 1]
(LiHao, ZhaoFagang, ZhouXubin. A quasi-zero stiffness vibration isolator based on hybrid bistable composite laminate Chinese Journal of Theoretical and Applied Mechanics, 2019,51(2):354-363 (in Chinese)) [本文引用: 1]
ZhouSY, ClaireJM, SimonC, et al. Closed-form solutions to optimal parameters of dynamic vibration absorbers with negative stiffness under harmonic and transient excitation International Journal of Mechanical Sciences, 2019, 157-158:528-541 DOIURL [本文引用: 1]
ChenMZQ, HuY, HuangL, et al. Influence of inerter on natural frequencies of vibration systems Journal of Sound & Vibration, 2014,333(7):1874-1887 [本文引用: 1]
(YangXiaofeng, ShenYujie, ChenLong, et al. Design and performances analysis of vehicle ISD suspension based on dynamic vibration absorber theory Automotive Engineering, 2014,36(10):1262-1266, 1277 (in Chinese)) [本文引用: 1]
HuY, Chen MZQ. Performance evaluation for inerter-based dynamic vibration absorbers International Journal of Mechanical Sciences, 2015,99:297-307 DOIURL [本文引用: 1]
HuY, Chen MZQ, ShuZ, et al. Analysis and optimisation for inerter-based isolators via fixed-point theory and algebraic solution Journal of Sound and Vibration, 2015,346(1):17-36 DOIURL [本文引用: 1]
WangXR, LiuXD, ShanYC, et al. Analysis and optimization of the novel inerter-based dynamic vibration absorbers IEEE Access, 2018,6:2844086 [本文引用: 1]
WangXR, HeT, ShenYJ, et al. Parameters optimization and performance evaluation for the novel inerter-based dynamic vibration absorbers with negative stiffness Journal of Sound and Vibration, 2019,463:114941 DOIURL [本文引用: 1]
(ChenJie, SunWeiguang, WuYangjun, et al. Minimization of beam response using inerter-based dynamic vibration absorber with negative stiffness Journal of Vibration and Shock, 2020,39(8):15-22 (in Chinese)) [本文引用: 1]
GioacchinoA, GiuseppeF. Improved inerter-based vibration absorbers International Journal of Mechanical Sciences, 2021,192:106087 DOIURL [本文引用: 1]
(WangYong, WangRuochen, MengHaodong, et al. Dynamic characteristics of semi active inerter-based vibration isolator with relative acceleration-relative velocity control Journal of Vibration and Shock, 2019,38(21):194-201, 228 (in Chinese)) [本文引用: 1]
 ,*,?,2), 杨绍普*,?
,*,?,2), 杨绍普*,?
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT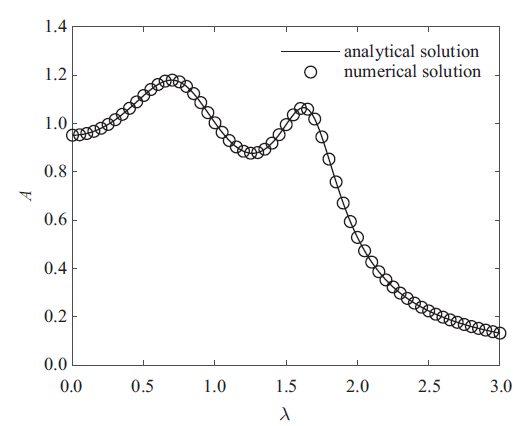 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT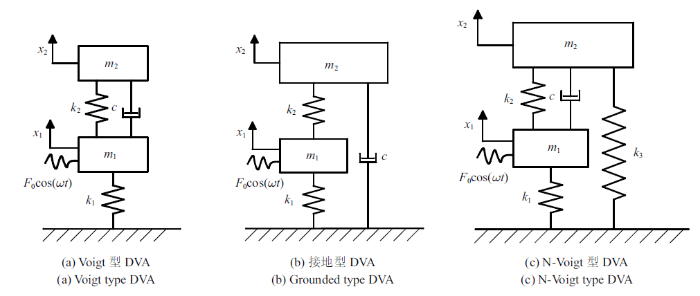 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT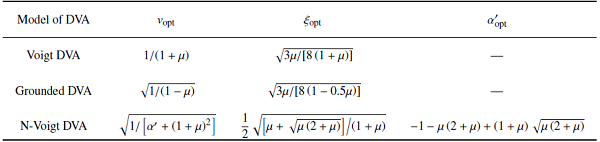
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT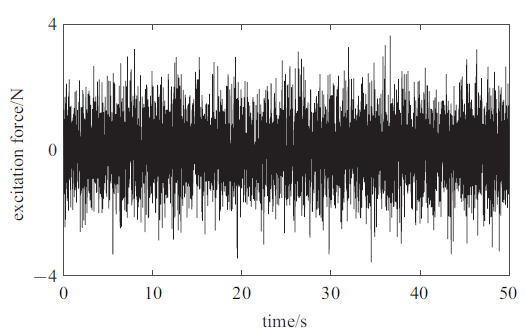 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}