ACTIVE VIBRATION CONTROL OF A ROTATING BLADE BASED ON MACRO FIBER COMPOSITE1)
Zhang Bo,*,†,2), Ding Hu†, Chen Liqun,**,3)*School of Science, Chang'an University, Xi'an 710064, China †School of Mechanics and Engineering Sciences, Shanghai University, Shanghai 200444, China **School of Science, Harbin Institute of Technology, Shenzhen 518055, Guangdong, China
Abstract For a long time, blade vibration failure occupies a quite large proportion of the total failure of the complete aeroengine. Developing the vibration reduction technology is of great importance for reducing the weight, improving the performance and extending the life for the rotating blade structure. In the present paper, the active vibration control is investigated in the presence of the 2:1 internal resonance of a pre-deformed rotating blade through introducing the sensors and actuators made of macro fiber composite (MFC). The equations of motion of the proportional-derivative feedback closed-loop control system are established with the effects of the time delay. The evolution equations of the controlled system are derived via the perturbation analysis. The effects of the velocity gain, the displacement gain, the time delay and some other system parameters on the steady-state response and the stabilities of the controlled system are revealed by the application of the continuation method. The analytic solutions are in good agreement with those obtained from the numerical integration. The main findings of the present study are as followings: the time delay has a significant effect on the stabilities of the controlled system. When the time delay exceeds a certain value, the equilibrium points of the evolution equations lose their stability. At the same time, the closed-loop control system enters a new period motion with a large vibration amplitude. There exists a range of displacement gain in which the multi-valued phenomenon appears in the steady-state response of the controlled system. Moreover, the straight borderline between the stable and the unstable regions in the gains plane is destroyed due to this range. Inappropriate assignments of the velocity gain and the displacement gain will cause a new resonance in the close-loop control system. The research results lay the theoretical foundations for the vibration reduction of the blade structure. Keywords:macro fiber composite;pre-deformed rotating blade;active vibration control;stabilities;multiple scales method
PDF (1213KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文 本文引用格式 张博, 丁虎, 陈立群. 基于压电纤维复合材料的旋转叶片主动控制1). 力学学报[J], 2021, 53(4): 1093-1102 DOI:10.6052/0459-1879-20-448 Zhang Bo, Ding Hu, Chen Liqun. ACTIVE VIBRATION CONTROL OF A ROTATING BLADE BASED ON MACRO FIBER COMPOSITE1). Chinese Journal of Theoretical and Applied Mechanics[J], 2021, 53(4): 1093-1102 DOI:10.6052/0459-1879-20-448
(ZhangWei, FengZhiqing, CaoDongxing. Analysis on nonlinear dynamics of the aero-engine blade Journal of Dynamics and Control, 2012,10(3):213-221 (in Chinese))
(WangYanqing, GuoXinghui, LiangHongkun, et al. Nonlinear vibratory characteristics and bifurcations of shrouded blades Chinese Journal of Theoretical and Applied Mechanics, 2011,43(4):755-764 (in Chinese))
ZhangW, NiuY, BehdinanK. Vibration characteristics of rotating pretwisted composite tapered blade with graphene coating layers Aerospace Science and Technology, 2020,98:105644 [本文引用: 1]
TakabatakeH. Effect of dead loads on natural frequencies of beams Journal of Structural Engineering-Asce, 1991,117(4):1039-1052 [本文引用: 1]
ZhangB, LiYM. Nonlinear vibration of rotating pre-deformed blade with thermal gradient Nonlinear Dynamics, 2016,86(1):459-478 [本文引用: 4]
ZhangB, ZhangYL, YangXD, et al. Saturation and stability in internal resonance of a rotating blade under thermal gradient Journal of Sound and Vibration, 2019,440(3):34-50 [本文引用: 4]
ZhangB, DingH, ChenLQ. Super-harmonic resonances of a rotating pre-deformed blade subjected to gas pressure Nonlinear Dynamics, 2019,98(4):2531-2549 [本文引用: 1]
ZhangB, DingH, ChenLQ. Subharmonic and combination resonance of rotating pre-deformed blades subjected to high gas pressure Acta Mechanica Solida Sinica, 2020,33(5):635-649 [本文引用: 1]
ZhangB, DingH, ChenLQ. Three to one internal resonances of a pre-deformed rotating beam with quadratic and cubic nonlinearities International Journal of Non-Linear Mechanics, 2020,126:103552 [本文引用: 2]
(GuWei, ZhangBo, DingHu, et al. Nonlinear dynamic response of pre-deformation blade with variable rotational speed under 2:1 internal resonance Chinese Journal of Theoretical and Applied Mechanics, 2020,52(4):1131-1142 (in Chinese)) [本文引用: 3]
GengXF, DingH, WeiKX, et al. Suppression of multiple modal resonances of a cantilever beam by an impact damper Applied Mathematics and Mechanics-English Edition, 2020,41(3):383-400 [本文引用: 1]
(ZhangHongyan, BaiChangqing, XuQingyu. TMD Design for seismic protection of multi-degree of freedom complex structures Chinese Journal of Applied Mechanics, 2008, 25(4): 583-587, 731-732 (in Chinese)) [本文引用: 1]
(WangZaihua, HuHaiyan. Stability of a force control system with sampled-data feedback Chinese Journal of Theoretical and Applied Mechanics, 2016,48(6):1372-1381 (in Chinese)) [本文引用: 1]
(WangQiang, LiangSong, WangZaihua. Stability of an inverted pendulum with a sampled-data PD feedback control Journal of Dynamics and Control, 2018,16(4):377-384 (in Chinese)) [本文引用: 1]
BaileyT, Ubbard JEJr. Distributed piezoelectric-polymer active vibration control of a cantilever beam Journal of Guidance, Control, and Dynamics, 1985,8(5):605-611 [本文引用: 1]
(TaoHongfei, CuiSheng. Active control of piezoelectric structures and optimal placement of piezoelectric actuators Journal of Dynamics and Control, 2019,17(3):234-243 (in Chinese)) [本文引用: 1]
(TuJianwei, ZhangJiarui, LuoWei, et al. Actuating equation and experimental verification of macro-fiber composite coupled-plate structures Engineering Journal of Wuhan University, 2019,52(4):324-330 (in Chinese)) [本文引用: 1]
(LiMeng, LiFengming. Active vibration control of a catilevered laminated plate using MFC actuators Journal of Dynamics and Control, 2017,15(4):342-349 (in Chinese)) [本文引用: 1]
(SunJie, SunJun, LiuFucheng, et al. Dynamics and control of rigid-flexible coupling flexible spacecraft with joint clearance Chinese Journal of Theoretical and Applied Mechanics, 2020,52(6):1569-1580 (in Chinese)) [本文引用: 1]
MinJB, DuffyKP, ChoiBB, et al. Numerical modeling methodology and experimental study for piezoelectric vibration damping control of rotating composite fan blades Computers and Structures, 2013,128:230-242 [本文引用: 1]
KandilAli, El-Gohary Hany A. Suppressing the nonlinear vibrations of a compressor blade via a nonlinear saturation controller Journal of Vibration and Control, 2018,24(8):1488-1504 [本文引用: 1]
KandilA, El-GanainiWA. Investigation of the time delay effect on the control of rotating blade vibrations European Journal of Mechanics A-Solids, 2018,72:16-40 [本文引用: 1]
KandilA, El-GoharyH. Investigating the performance of a time delayed proportional-derivative controller for rotating blade vibrations Nonlinear Dynamics, 2018,91(4):2631-2649 [本文引用: 1]
(TangYe, WangTao, DingQian. Stability analysis on parametric vibration of piezoelectric rotating cantilever beam with active control Chinese Journal of Theoretical and Applied Mechanics, 2019,51(6):1872-1881 (in Chinese)) [本文引用: 1]
(HanJiang, QiaoYinhu, ZhangChunyan, et al. The review for elastomer smart active wind turbine blade vibration control Chinese Journal of Applied Mechanics, 2015,32(3):446-453, 449 (in Chinese)) [本文引用: 1]
(YaoXiaocheng, ZhaoCheng, ZengTao. Research progress and application status of piezoelectric materials for vibration control Materials for Mechanical Engineering, 2019,43(6):72-76 (in Chinese)) [本文引用: 1]
(HuHaiyan. Identifiability of feedback delays of linear controlled systems Journal of Vibration Engineering, 2001(2):41-45 (in Chinese)) [本文引用: 1]
HuHY, WangZH. Stability analysis of damped SDOF systems with two time delays in state feedback Journal of Sound and Vibration, 1998,214(2):213-225 [本文引用: 1]
 ,*,†,2), 丁虎†, 陈立群
,*,†,2), 丁虎†, 陈立群
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT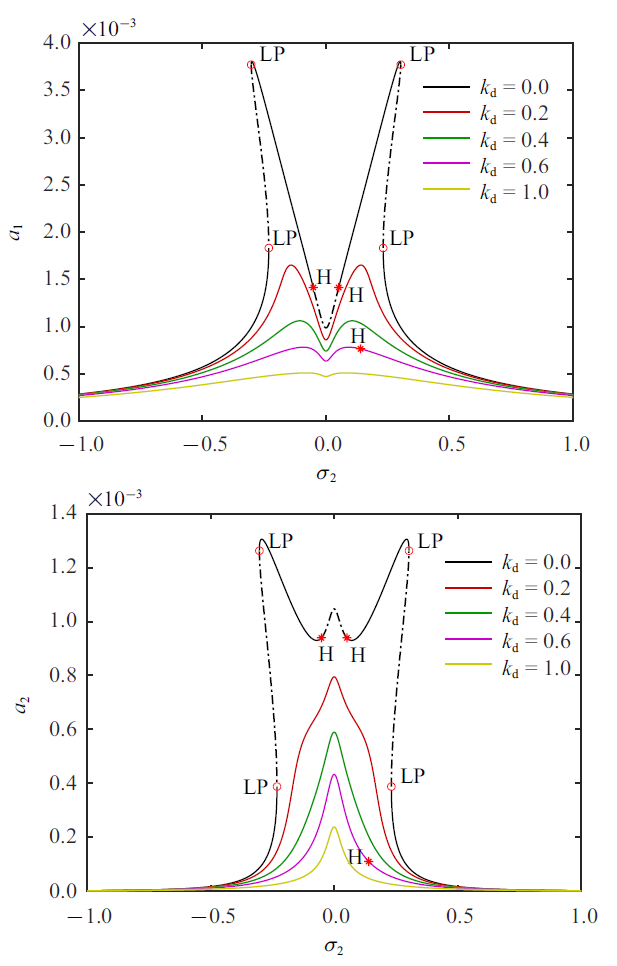 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT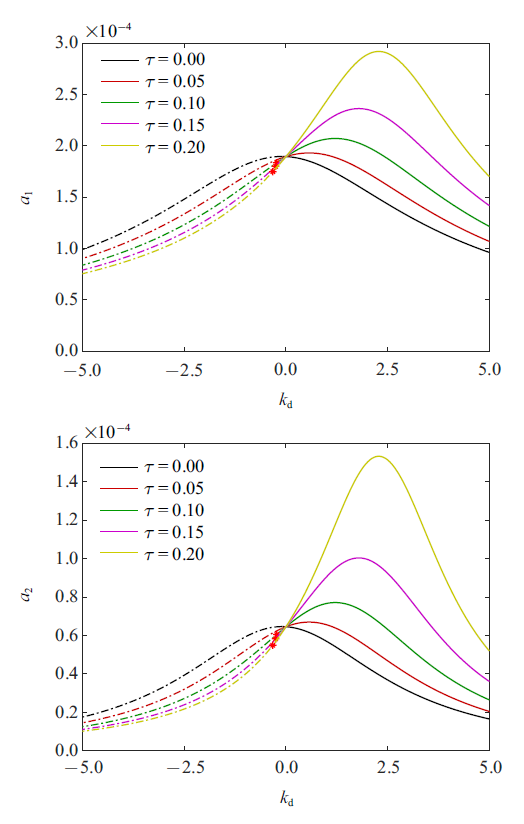 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT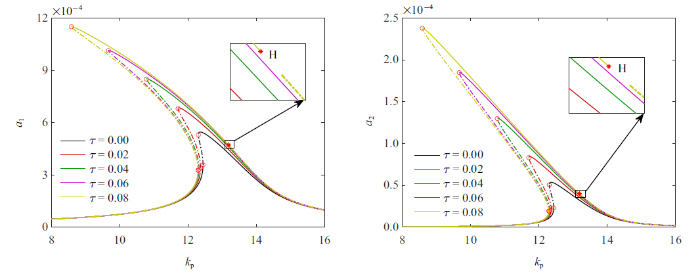 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT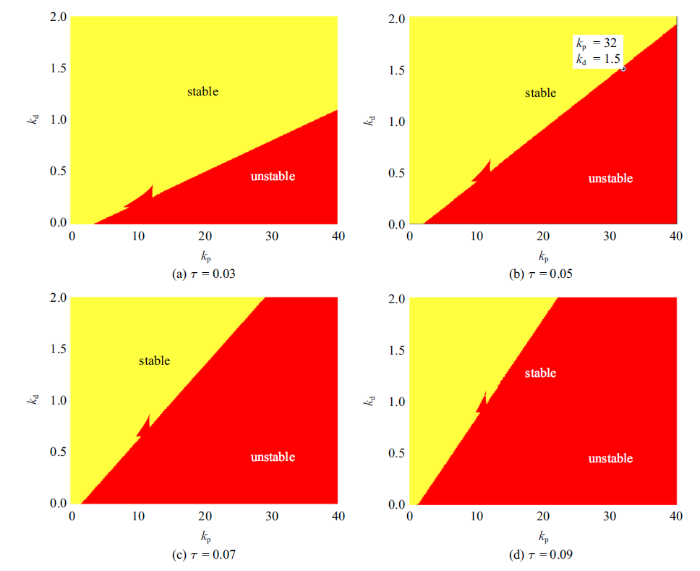 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}