HTML
--> --> -->Many studies have aimed at improving our understanding of the genesis and evolution of typhoons and hurricanes (Black et al., 2007; Sanford et al., 2007; Bell et al., 2012), consequently, the track forecasting of typhoons has significantly improved in recent decades. However, the forecasting of typhoon genesis, intensification, and change in track direction are still subject to a high degree of uncertainty (Bender et al., 2007). In particular, errors in model initialization, caused by the lack of real-time marine meteorological observations, especially in remote sea areas, is one of the main reasons for the uncertainty in typhoon forecasting (Feng et al., 1999; Committee on Atmospheric Science and Climate et al., 2008; Ito and Wu, 2013; Rogers et al., 2013; Emanuel, 2018). Over the past two decades, China's meteorological, oceanographic, scientific and maritime departments have installed several automated weather stations on offshore manned and unmanned islands, and on oil and gas platforms, in addition to the dozens of marine buoys that have been deployed along the coast. Some meteorological and oceanographic observation data have been obtained during the passage of typhoons, and case studies of typhoons have revealed meteorological and oceanographic characteristics of their development. (Yang et al., 2015; Chen et al., 2019a). However, the number of meteorological and oceanographic observing platforms and buoys deployed along coastal regions of China is still small, and very few are deployed in the deep ocean (Dai et al., 2014). This situation limits the improvement of marine meteorological and hydrological forecasting, especially for typhoon forecasting. Therefore, it is necessary to develop advanced observation technology and equipment to help fill the data gaps (Eckman et al., 2007). With advances in satellite communication, navigation technology, and computer technology, breakthroughs have been made in recent years regarding the research and application of marine unmanned autonomous observation systems (Lenan and Melville, 2014; Wynn et al., 2014).
To obtain long-term and real-time meteorological and oceanographic observations, especially during the passage of typhoons, the Institute of Atmospheric Physics (IAP) of the Chinese Academy of Sciences developed a solar-powered, long-endurance, marine, unmanned, and autonomous meteorological observation platform. The solar-powered unmanned surface vehicle (USV) passed through the center of Typhoon Sinlaku (2020) on 1 August, 2020 and successfully collected real-time data of the typhoon that are valuable for typhoon research and forecasting.
In this paper, we introduce the IAP USV and its onboard instrumentation. We then briefly describe Typhoon Sinlaku (2020) and the USV typhoon observation experiment and present preliminary results. In the final section, we summarize our findings and discuss future potential applications of USVs.
 Figure1. The IAP solar-powered USV conducted sea trials in a sea area near Tanmen Port of Hainan Island in June 2020.
Figure1. The IAP solar-powered USV conducted sea trials in a sea area near Tanmen Port of Hainan Island in June 2020.| Technical parameters | The solar-powered USV |
| Observation modes | Navigation mode, positioning mode, drifting mode |
| Weight | 80 kg |
| Size | 4.6 m×2.0 m×1.2 m |
| Speed | 3–5 knots |
| Endurance | 30 days |
| Positioning accuracy | 10 m |
| Payload | 20 kg |
| Communication | Beidou satellite communication |
| Data interface | USB/RS232 |
| Power | Solar energy/24 V |
| Power consumption | 400 W |
| Sea states | 6–7 |
| Communication frequency | 1–60 mins (adjustable) |
| Observation parameters | Temperature, humidity, air pressure, wind direction, wind speed, SST, salinity, and total shortwave radiation |
Table1. Main technical parameters of the solar-powered USV.
| Observation parameters | Technical specifications (range and accuracy) |
| Temperature | ?25°C?55°C, 0.2°C |
| Air pressure | 850?1150 hPa, 0.5 hPa |
| Relative humidity | 0?100%, ±3% |
| Wind speed | 0?40 m s?1, 1 m s?1 |
| Wind direction | 0°?360°, 2°?5° |
| Total shortwave radiation | 0?2000 W m?2, 3% |
| Seawater temperature | ?5°C?35°C, 0.01°C |
| Conductivity | 0?80 mS cm?1, 0.01 mS cm?1 |
Table2. Technical specifications of the meteorological and hydrological observation parameters
Compared with traditional meteorological and oceanographic observation platforms such as buoys, the main technical advantages of the USV are as follows:
(1) Automatic deployment, collection, and transmission of data.
(2) Powered by solar energy, the USV can carry out long-term and long-range continuous meteorological and oceanographic observations.
(3) The semi-submersible structure minimizes the effect of waves on vehicle motion, making the USV very stable and allowing it to survive and collect data under extreme sea conditions (sea state 6–7).
(4) Real-time acquisition and Beidou satellite transmission of high temporal resolution (up to one minute) observations.
The main components of the USV system are the USV hull, USV control system, power system, communication system, meteorological and hydrological observation loads, auxiliary unit, and a ground control center. A block diagram of the system is shown in Fig. 2. The meteorological and hydrological sensors were calibrated before and after the observation experiment. The USV can be self-righting, semi-submerged, and has a high waterproof grade, and can work under severe sea conditions (sea state 6–7). The onboard control system can preset and change the navigation route and observation mode via presets and real-time commands issued with the communication system from the ground control center. The communication system transmits control commands and observation data in real time through the Beidou satellite array. The USV platform can carry different types of meteorological and oceanographic observation instruments according to the observation mission. The ground control center monitors the working state of the USV in real time, sends control commands, and receives and stores observation data.
 Figure2. Block diagram of the USV meteorological and oceanographic observation system.
Figure2. Block diagram of the USV meteorological and oceanographic observation system.On 22 July, 2020, in coordination with the “Petrel Project”, a USV was deployed from Tanmen Port of Hainan Island to participate in the South China Sea Typhoon Observation Experiment. The track of the USV from 22 July to 4 August, 2020, is shown in Fig. 3. On 23 July, the USV arrived at the UAV observation sea area, 96 kilometers away from Tanmen Port, and conducted positioning observations (Fig. 3b). In conjunction with the pre-experiment of UAV observations, the USV sailed to the sea area below the UAV route and conducted observations on 24 July. From 24 to 26 July, the USV carried out drifting-returning-fixed-point observation tests in the positioning sea area to improve the efficiency of the electric energy utilization of USVs for the purpose of achieving long-term, quasi-fixed-point observations. The trajectory of the USV in the positioning sea area is shown in Fig. 3c. During the quasi-fixed-point observation test, the USV drifted approximately 13–15 km at night and returned to the positioning point in 4–5 hours against the currents; 78.0%, 61.3%, and 55.3% of the time, the USV was within 10, 5, and 3 km of the positioning point, respectively. On 26 July, the USV sailed southeast to conduct a deep-sea observation test, and at 0803 LST 29 July, it reached the farthest point in this experiment, which was 176.6 km away from Tanmen Port and 151.5 km away from the coast of Hainan Island. The USV continued to sail in the northwest direction before returning to the fixed point on 30 July.
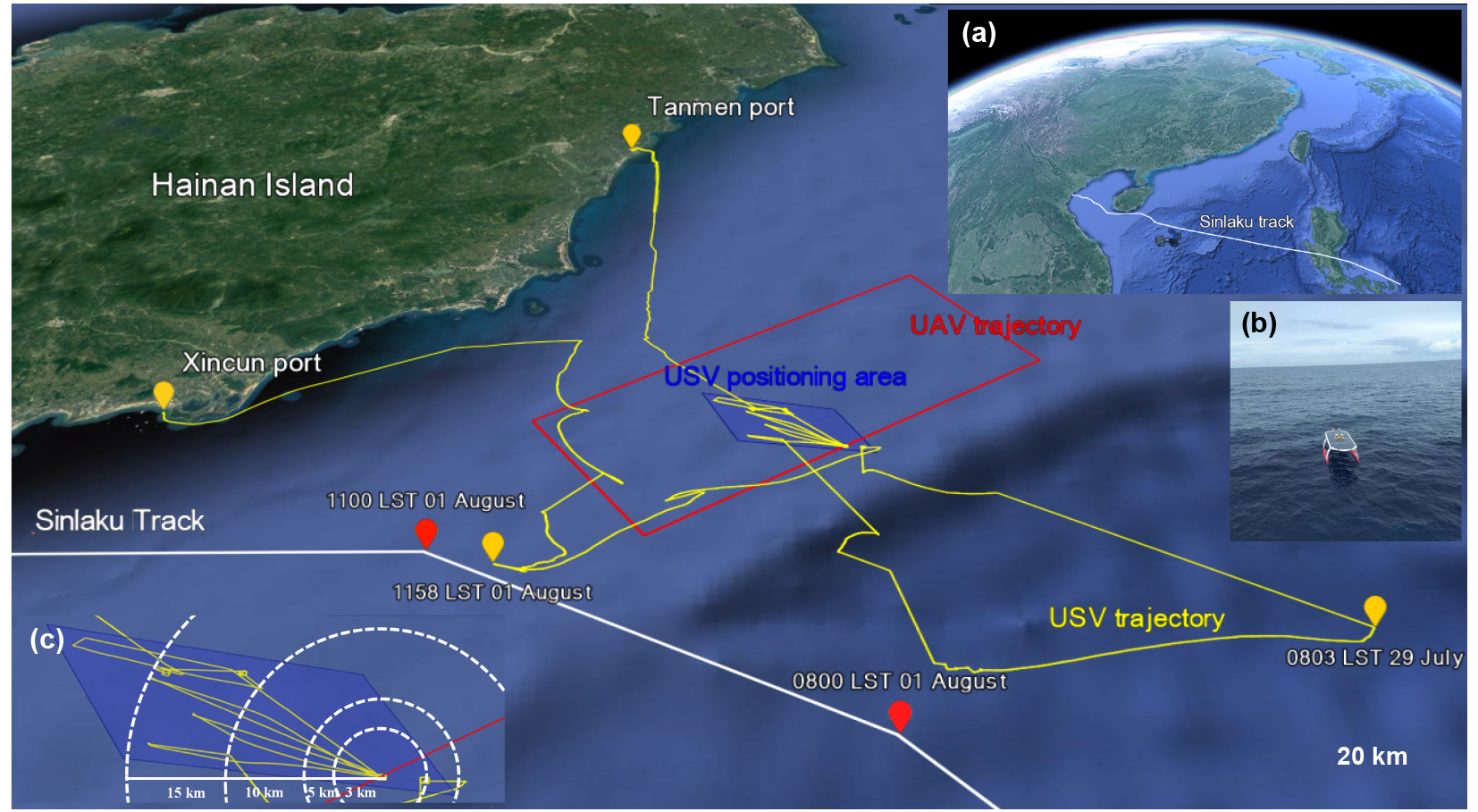 Figure3. Map of the trajectory of the USV during the USV South China Sea typhoon observation experiment from 22 July to 4 August 2020. The yellow, white, and red trajectories represent USV routes, Typhoon Sinlaku (2020) track, and UAV routes, respectively. (a) Track of Typhoon Sinlaku (2020) is shown. (b) The USV sailing in the South China Sea. (c) The trajectory of the USV positioning in the sea area.
Figure3. Map of the trajectory of the USV during the USV South China Sea typhoon observation experiment from 22 July to 4 August 2020. The yellow, white, and red trajectories represent USV routes, Typhoon Sinlaku (2020) track, and UAV routes, respectively. (a) Track of Typhoon Sinlaku (2020) is shown. (b) The USV sailing in the South China Sea. (c) The trajectory of the USV positioning in the sea area.The meteorological and oceanographic sensors all worked well from 22 to 30 July, and the measurement data per minute were transmitted in realtime via the Beidou satellite communication system to the ground station, with a data integrity rate of 89.7%. The environmental conditions measured by the USV during the typhoon observation experiment are shown in Fig. 4. Before the USV approached the typhoon system, the air temperature and relative humidity showed obvious diurnal changes and negative correlations, while the air pressure, SST, and salinity also showed diurnal changes, but these variation ranges were small. After the USV reached the UAV observation sea area on 23 July, southerly and southwesterly winds were dominant, with an average wind speed of 4.1 m s?1 and a maximum wind speed of 10.4 m s?1. On 29 July, the wind gradually strengthened and changed from southerly to northerly. The air temperature, air pressure, SST, and salinity gradually decreased. The total solar radiation observations showed that this period was characterized by both sunny and cloudy conditions. On 31 July, the USV approached the typhoon system, with dramatic changes in air temperature, pressure, and wind speed. The maximum measured wind speed was 15.1 m s?1. Unfortunately, on 31 July, the humidity sensor stopped working.
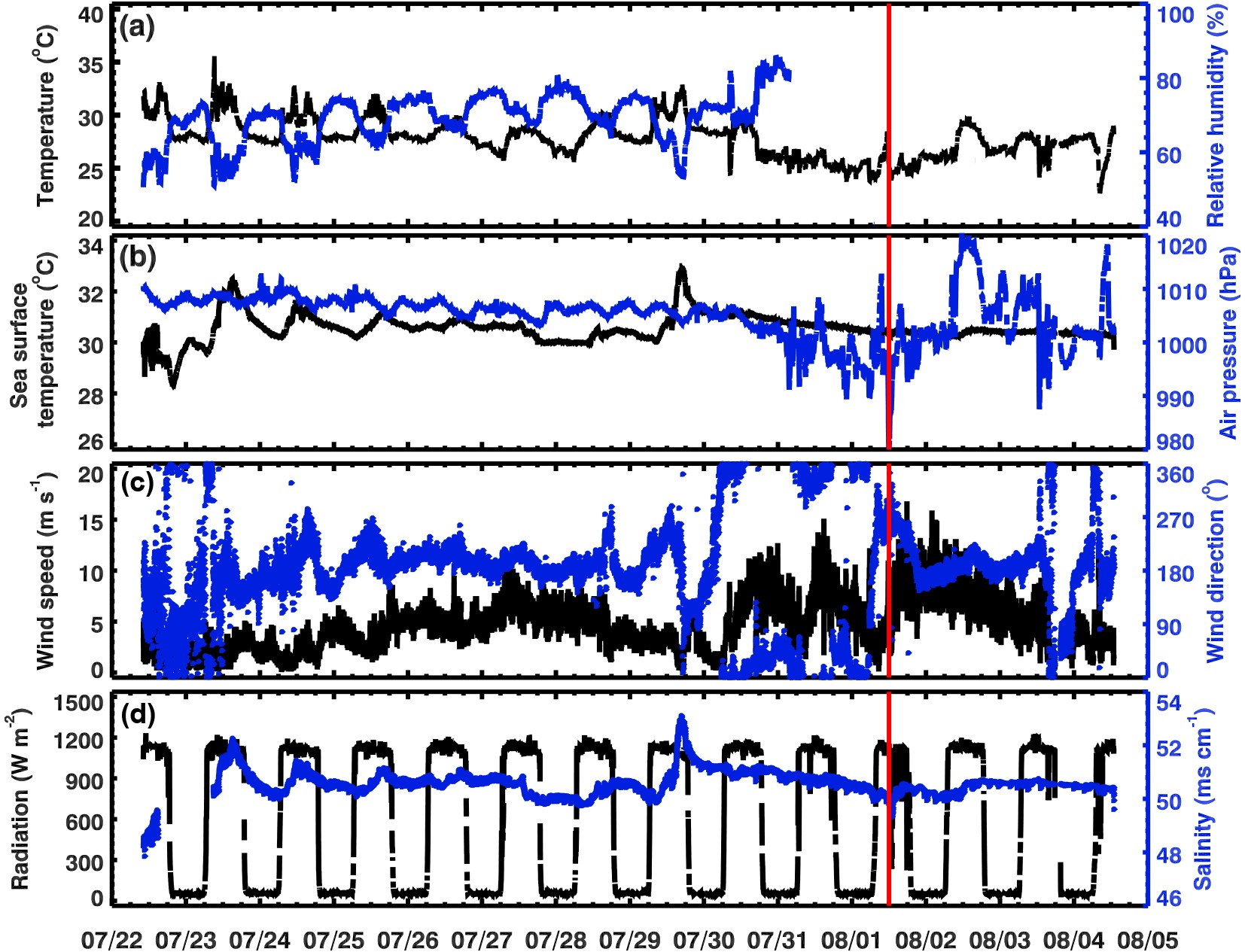 Figure4. Time series (LST) of (a) air temperature and relative humidity, (b) SST and atmospheric pressure, (c) wind direction and wind speed, and (d) total shortwave radiation and seawater salinity collected onboard the USV during the USV South China Sea typhoon observation experiment from 22 July to 4 August 2020. The solid red lines represent the times that the USV was close to the center of Typhoon Sinlaku (2020).
Figure4. Time series (LST) of (a) air temperature and relative humidity, (b) SST and atmospheric pressure, (c) wind direction and wind speed, and (d) total shortwave radiation and seawater salinity collected onboard the USV during the USV South China Sea typhoon observation experiment from 22 July to 4 August 2020. The solid red lines represent the times that the USV was close to the center of Typhoon Sinlaku (2020).On 31 July 2020, the Central Meteorological Observatory (CMO) of the CMA predicted that a tropical depression would strengthen into a typhoon [named Sinlaku (2020)] and move in a northwesterly direction close to Hainan Island, at which time the USV was approximately 30 km away from the forecasted path of Sinlaku (2020). The USV then sailed at full speed to the sea area where Sinlaku (2020) was expected to pass through and arrived at the area at 0928 LST on 1 August, 2020. The environmental conditions measured by the USV on 1 August are shown in Fig. 5. At 1158 LST, the USV successfully passed through the center of Typhoon Sinlaku (2020), which is about 2.4 km from the typhoon path issued by the CMO. At 0900 LST on 1 August, typhoon observation data were provided by the IAP’s ground control center to the operational Typhoon and Marine Weather Prediction Center of the CMO in real time. This was the first time that USV observation data were used for operational typhoon warning and forecasting.
 Figure5. Time series (LST) of (a) air temperature and relative humidity (the humidity sensor stopped working), (b) SST and atmospheric pressure, (c) wind direction and wind speed, and (d) total shortwave radiation and seawater salinity collected onboard the USV during Typhoon Sinlaku (2020) passage on 1 August 2020. The solid red lines represent the time that the USV was close to the typhoon center.
Figure5. Time series (LST) of (a) air temperature and relative humidity (the humidity sensor stopped working), (b) SST and atmospheric pressure, (c) wind direction and wind speed, and (d) total shortwave radiation and seawater salinity collected onboard the USV during Typhoon Sinlaku (2020) passage on 1 August 2020. The solid red lines represent the time that the USV was close to the typhoon center.Within the experiment, the IAP solar-powered USV actively navigated towards the path of Typhoon Sinlaku (2020) and successfully collected measurements on air and sea conditions at 1 min intervals and transmitted them in real time to the ground control center before being forwarded to an operational typhoon forecast center. According to our knowledge, this is the first time such achievements were accomplished by a USV, providing valuable data that traditional observation platforms could not provide, that have the potential for improving both the research and forecasting of typhoons as well as other types of weather over ocean.
Typhoon development involves air-sea interactions throughout the entire typhoon system; therefore, it is necessary to deploy multiple USVs to obtain sea-surface meteorological and oceanographic data and seawater temperature and salinity profiles in the upper ocean. The new generation solar-powered USVs can also carry other sensors relevant to marine science, including wave sensors, conductivity-temperature-depth sensors, and acoustic Doppler current profilers that can provide vertical profiles of the conductivity, water temperature, current velocity in the upper ocean, as well as, sea surface wave height and direction. A multiple USV observation network can provide comprehensive meteorological and oceanographic data at temporal and spatial resolutions required for research, forecasting, and early warnings for many types of marine meteorological disasters. Further development, testing, and application of solar-powered USVs and related instruments should continue.
Acknowledgements. This work is supported by the National Natural Science Foundation of China (Grant No. 41627808), the Research Equipment Development Project of the Chinese Academy of Sciences, and the Petrel Meteorological Observation Experiment Project of the China Meteorological Administration and the “Adaptive Improvement of New Observation Platform for Typhoon Observation (2018YFC1506401)” of the Ministry of Science and Technology. We wish to express our sincere gratitude to Beijing Chunyi Aviation Technology Co., Ltd., Hainan Meteorological Service, Hu WANG and Chunhua WANG of Qionghai Meteorological Service, and all personnel who participated in this experiment.
