 ,1,*, 官云兰2, 周静平1, 王道芸2, 罗正乾3
,1,*, 官云兰2, 周静平1, 王道芸2, 罗正乾3Generation and application of high temporal and spatial resolution images of regional farmland based on ESTARFM model
CHEN Meng-Lu1,2, LI Cun-Jun,1,*, GUAN Yun-Lan2, ZHOU Jing-Ping1, WANG Dao-Yun2, LUO Zheng-Qian3通讯作者:
收稿日期:2018-09-17接受日期:2019-01-19网络出版日期:2019-02-27
| 基金资助: |
Received:2018-09-17Accepted:2019-01-19Online:2019-02-27
| Fund supported: |
作者简介 About authors
E-mail:chenml712@163.com。

摘要
关键词:
Abstract
Keywords:
PDF (10271KB)元数据多维度评价相关文章导出EndNote|Ris|Bibtex收藏本文
本文引用格式
陈梦露, 李存军, 官云兰, 周静平, 王道芸, 罗正乾. 基于ESTARFM模型的区域农田高时空分辨率影像产生与应用[J]. 作物学报, 2019, 45(7): 1099-1110. doi:10.3724/SP.J.1006.2019.81065
CHEN Meng-Lu, LI Cun-Jun, GUAN Yun-Lan, ZHOU Jing-Ping, WANG Dao-Yun, LUO Zheng-Qian.
农作物生长周期内的多时相遥感影像可对农作物生长情况精细观测, 特别是关键生育期数据是农业物候、长势及产量监测的重要数据源。目前, 高时间分辨率数据和高空间分辨率数据虽然比较丰富, 然而可见光影像易受云雨干扰, 在特定区域关键时间窗口兼顾时间分辨率和空间分辨率的高时空分辨率数据还比较缺乏。以目前较常用的高时间分辨率数据MODIS与高空间分辨率数据Landsat影像为例, MODIS影像具有36个光谱波段, 产品级别丰富, 每一到两日可获取一次全球观测数据, 重访观测能力强, 但是其最大空间分辨率只有250 m, 对于地球表面的细节表征能力不强, 只能在大尺度区域上的作物识别与监测上取得较好效果; Landsat卫星多光谱影像的空间分辨率为30 m, 但重访周期只能达到16 d, 且易受云雨天气的影响, 无法获取连续的高质量时序数据[1], 这限制了它在监测农作物植被生长动态变化方面的应用。因此, 研究遥感影像时空数据融合方法, 结合二者优势, 生成既有高时间分辨率又有高空间分辨率的影像, 对农作物物候变化监测十分重要[2,3]。
近年来多尺度传感器遥感数据融合快速发展, 国内外****针对这一方面开展了研究[4], Gao等[5]提出了一种自适应遥感影像融合模型STARFM (spatial and temporal adaptive reflectance fusion model), 用于融合Landsat和MODIS影像, 生成与MODIS影像相应时间的模拟Landsat影像, 能较为准确地预测出高时空分辨率影像的反射率数据。但STARFM也存在一些局限性, 如果在所使用的Landsat影像中未记录地表覆盖在较短时间内的剧烈变化, 那么预测的影像也不会表征该情况[6]。Hilker等[7]基于STARFM算法提出STAARCH (spatial temporal adaptive algorithm for mapping reflectance change)时空融合算法, 通过选择最佳时相的Landsat数据进行融合来提高融合精度。Zhu等[8]提出ESTARFM (Enhanced Spatial and Temporal Adaptive Reflectance Fusion Model)算法, 该方法使用两期对应观测时间的高空间分辨率、低时间分辨率影像和低空间分辨率、高时间分辨率影像, 以及在预测日期获取的低空间分辨率影像获取对应时间的模拟高空间分辨率影像, 广泛应用在空间动态监测及作物提取等方面[9,10,11,12]。邬明权等[13]提出了STDFA (spatial and temporal data fusion model)算法, 该方法能够产生具有MODIS时间分辨率和Landsat空间分辨率的影像。石月婵等对目前常用的3种时空融合方法进行对比分析[14], 从光谱特征和地类的角度评价了不同方法的融合结果并探讨其在红色波段、近红外波段与NDVI上的表现, 分析了方法的适用性。Wu等[15]对STDFA进行改进后提出了ISTDFA (improved high spatial and temporal data fusion approach)算法, 通过求解由光谱差和距离指数加权的线性混合模型可以很好地调整反射率的空间变化, 进而提高影像预测精度。比较而言, ESTARFM时空数据融合模型考虑了像元的异质性, 引入纯净像元与混合像元在一段时间内反射率变化的转换系数, 提高了模型在异质性较高区域的反射率融合精度, 在小区域实验中有较好的效果, 然而在更大面积区域遥感应用的有效性有待验证。
对于农业遥感监测, 需要作物关键生育期内的多时间序列数据及特定时相的高空间分辨率影像。本文基于Zhu等[8]提出的ESTARFM时空数据融合模型, 利用MODIS的多时相信息与Landsat-8 OLI的高空间细节信息, 合成高时空分辨率影像, 选取黑龙江、河北、新疆部分县市为研究区域, 生成兼具MODIS时间分辨率和Landsat空间分辨率特征的融合影像, 进而将其与真实Landsat影像对比分析, 研究其在中国部分区域的适用性; 并利用ESTARFM算法将新疆地区2017年缺失以及由于云雨干扰无法使用的Landsat影像插补完成, 生成8 d时间间隔的Landsat影像, 提取年际高分辨率NDVI曲线, 来反映田块尺度上的物候变化, 并进行作物长势监测, 进一步验证该算法在农业遥感方面的可行性。
1 数据与方法
1.1 研究区概况
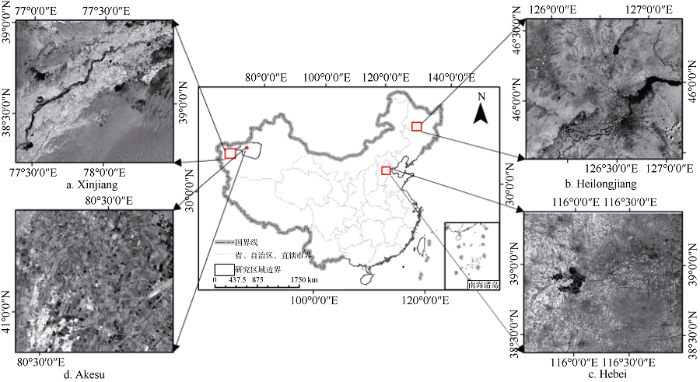
为验证ESTARFM算法的适用性, 选取我国北方农业种植大省为研究区域(图1中a.b.c区域), 其地表覆盖情况、地貌类型、气候降水量等均存在明显差异。第1个研究区位于河北省保定市境内, 地处华北平原(38°21′N~39°22′N, 115°21′E~117°03′E), 面积约4800 km2, 其地势由西北向东南倾斜, 地貌复杂多样, 属暖温带季风气候, 年均降水量484.5 mm, 主要集中在夏季。全省的粮食播种面积占耕地总面积的80%以上, 主要种植小麦和玉米等。第2个研究区在黑龙江省哈尔滨市境内, 位于中国东北部(45°22′N~46°43′N, 125°31′E~127°23′E), 面积约6000 km2, 地貌类型多变, 地块破碎, 山地、平原、河流交叉分布, 属温带大陆性季风气候。降水资源比较稳定, 全省年日照时数多在2400~2800 h, 主要作物是水稻、玉米等[16]。第3个研究区域位于中国西北边陲的新疆喀什地区(38°06′N~39°43′N, 76°46′ E~78°38′E), 面积约6500 km2, 属明显的温带大陆性干旱气候带, 温差较大[17], 日照时间充足(年日照时数2500~3500 h), 降水量少, 气候干燥, 主要作物为小麦与棉花。这3个研究区域具有明显地理特征差异, 以作物关键生育期的一景影像进行对比, 可以开展ESTARFM算法的适应性研究。图1
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图1研究区域地理位置
Fig. 1Location of study area
为分析ESTARFM算法产生多时相遥感数据在农业监测方面的可靠性与可行性, 选取新疆阿克苏地区作为第4个研究区域(图1中d区域)进行实验, 该农区面积小、作物典型且需要多时相影像进行作物监测。其坐标为39°30′N~42°40′N和78°02′E~ 84°05′E, 面积为460 km2, 地处新疆维吾尔自治区中部, 天山山脉中段南麓、塔里木盆地北缘, 年平均气温9.9~11.5℃, 年降水量42.4~94.4 mm, 水源丰富、光照充足、无霜期长, 适宜作物生长, 全市耕地面积5.2 hm2, 森林面积4.7 hm2, 是国家重要的商品粮基地。
1.2 数据预处理
1.2.1 Landsat-8 OLI 根据实验区地形地貌特征及影像云量分布情况, 分别选取3景Landsat-8 OLI影像进行实验分析, 各研究区影像获取时间见表1。前后两期为基准影像, 中间时期为验证影像, 用来对测试结果进行精度验证。影像来源于中科院对地观测数据共享计划(Table 1
表1
表1Landsat-8 OLI影像日期
Table 1
| 研究区域 Research area | 中心经纬度 Center latitude and longitude | 日期(年积日) Date (DOY) |
|---|---|---|
| 河北研究区 Hebei research area | 38°42′5″N,115°9′13″E | 2017-03-27(86), 2017-04-12(102), 2017-05-14(134) |
| 黑龙江研究区 Heilongjiang research area | 46°13′16″N,126°43′27″E | 2017-07-07(188), 2017-09-09(252), 2017-09-25(268) |
| 新疆研究区 Xinjiang research area | 38°29′55″N,77°21′14″E | 2017-06-07(158), 2017-06-23(174), 2017-08-10(222) |
新窗口打开|下载CSV
1.2.2 MCD43A4 从NASA网站(
Table 2
表2
表2MODIS与Landsat-8波段设置
Table 2
| Landsat-8 OLI波段 Landsat-8 OLI band | 波长范围 Wavelength range (nm) | 空间分辨率 Spatial resolution (m) | MCD43A4波段 MCD43A4 band | 波长范围 Wavelength range (nm) | 空间分辨率 Spatial resolution (m) |
|---|---|---|---|---|---|
| 2 | 450-515 | 30 | 3 | 459-479 | 500 |
| 3 | 525-600 | 30 | 4 | 545-565 | 500 |
| 4 | 630-680 | 30 | 1 | 620-670 | 250 |
| 5 | 845-885 | 30 | 2 | 841-876 | 250 |
| 6 | 1560-1660 | 30 | 6 | 1628-1652 | 500 |
| 7 | 2100-2300 | 30 | 7 | 2105-2155 | 500 |
新窗口打开|下载CSV
将下载的MCD43A4影像利用MODIS重投影工具MRT (MODIS Reprojection Tool)重新投影为UTM-WGS84, 转换成Geo-tif数据格式, 并裁剪出研究区范围内的影像, 采用双线性内插法重采样成相同的30 m分辨率, 处理后影像与Landsat在像元大小、数据分辨率、投影方式等保持一致。
图2
 新窗口打开|下载原图ZIP|生成PPT
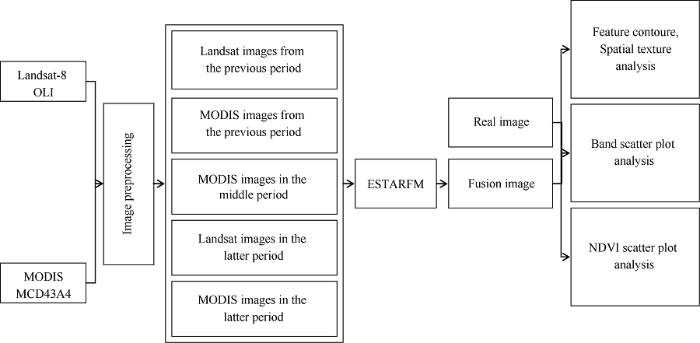
新窗口打开|下载原图ZIP|生成PPT图2技术流程框图
Fig. 2Structure of technical flow
1.3 ESTARFM时空数据融合算法
ESTARFM算法是基于STARFM算法改进的, 考虑了像元的异质性, 对赋权方法进行调整, 引入一个转换系数来对预测结果进行改进, 提高了特别是异质性较大区域的预测精度, 能够很好地保留空间细节[8]。在保证两幅影像精确配准之后, 假设Landsat与MODIS影像之间反射率的差异仅仅是由不同影像之间地表反射率存在的系统偏差引起的, 且在2个时期之间影像并未产生较大差异[8], 如公式(1)所示。其中, L、M分别表示Landsat影像与MODIS影像, (x, y)表示像元位置, B表示影像波段, t0、tp分别表示影像获取的2个时间, a为转换系数, 由传感器之间的系统偏差所决定。
由于地表情况具有复杂性, 仅利用这一对像元信息预测, 会出现很大偏差, 假设混合像元的反射率变化包含该像元中所有不同地表覆盖成分的反射率变化, 2个日期之间混合像元反射率的变化代表像元中不同地表覆盖成分反射率变化的加权总和, 且其中各地表覆盖成分比例基本保持不变, 如公式2所示。
V(x,y)是考虑了混合像元分解的第i个相似像元的转换系数, 以上公式考虑到了相邻像元具有相似的反射率变化, 利用邻域像元设定的移动窗口, 可以搜索每个窗口内的相似像元, 利用像元之间的关系, 得到所需要预测影像的中心像元值, 进而得到预测影像, 如公式3所示。
其中, N是包括中心预测像元的相似像元的数目, (xi,yi)是第i个相似像元的位置, W是第i个相似像元的权重, Vi是第i个相似像元的转换系数。
根据第1个时期m时刻Landsat与tp时刻的MODIS来预测tp时刻Landsat影像的反射率, 记为Lm(xw/2,yw/2,tp,B), 或者利用第2个时期n时刻的观测数据来预测tp时刻的Landsat影像的反射率, 记为Ln(xw/2,yw/2,tp,B)[19,20,21]。通过这2个预测结果的加权组合可以获得更加精确的tp时刻的Landsat影像的反射率。根据tm和tn与预测时刻tp之间MODIS反射率检测到的变化幅度来计算权重, 如公式(4)。
由公式(5)预测中心像元反射率。
将经过预处理后影像信息保持一致的前后两期对应时间的Landsat与MODIS影像, 及中间时期MODIS影像共5景作为ESTARFM模型的输入数据, 生成中间时期Landsat影像[22,23], 并与预测日期当天的真实影像精度对比分析。首先将融合后影像与真实Landsat直接对比, 比较各类地物轮廓及空间纹理信息。其次利用基于影像反射率值的散点图分布对这3个研究区域的两组数据进行相关性分析。最后通过对比3个地区内两组NDVI值的散点图验证ESTARFM算法对中国北方地理区域适用性分析的精度。
2 结果与分析
2.1 影像融合结果
预测得到的结果如图3所示, 分别为研究区域在预测时相下的原始Landsat反射率数据、部分细节表征图与经ESTARFM算法融合后结果, 可直观看出, 融合后得到的影像细节清晰, 各类地物都能很好表征出来, 且不同地物间有明确分界线, 与原始影像存在的差异较小。细节图上分别选取了一些对比较为明显且具有代表性的区域(如建筑物、水体、沙漠和植被)放大显示, 可直观地比较各种地物融合的效果。从细节图中可以看出融合影像中各地物轮廓特征与原始影像基本保持一致。河北研究区域影像受红波段影响较大, 融合后影像部分区域如建筑物表面呈现红色, 其次黑龙江研究区域影像中水体呈现其他颜色, 这是由于水体在近红外波段吸收最强, 当含有其他物质, 如泥沙及叶绿素时, 反射率会发生变化。新疆研究区域水体中含泥沙量较大, 故水体部分区域反射率也发生了变化, 但对于其他地物, ESTARFM方法有较好的预测效果。图3
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图3原始Landsat-8 OLI影像与ESTARFM融合后影像对比
A、D和G: 河北、黑龙江和新疆农区真实Landsat影像; C、F和I: 河北、黑龙江和新疆农区经ESTARFM预测后影像; B、E和H: 真实影像与预测影像细节表征对比图。
Fig. 3Comparison of original Landsat-8 OLI image with ESTARFM
A, D, and G: true Landsat images in Hebei, Heilongjiang and Xinjiang area; C, F, and I: predicted images from Hebei, Heilongjiang and Xinjiang area via ESTARFM; B, E, and H: comparison of real image and predicted image detail.
图4为原始Landsat影像与融合后影像在6个波段上的散点图分布对比情况。根据表1可知, 河北研究区域对比的波段散点的时相为2017年4月12日, 黑龙江研究区域散点图波段选取的时相为2017年9月9日, 新疆研究区域散点图选取的时相为2017年6月23日。图中横坐标为真实Landsat影像反射率数据, 纵坐标为ESTARFM算法融合后影像反射率数据。散点基本都在1:1趋势线的两侧, 分布较为集中。
图4
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图4真实Landsat影像(横坐标)与ESTARFM融合后影像(纵坐标)反射率值对比
A1~A6: 河北农区真实Landsat影像与经ESTARFM模型融合后影像各波段的相关性; B1~B6: 黑龙江农区真实Landsat影像与经ESTARFM模型融合后影像波段的相关性; C1~C6: 新疆农区真实Landsat影像与经ESTARFM模型融合后影像波段的相关性。
Fig. 4Comparison of reflectance values between real Landsat images (abscissa) and ESTARFM fusion images (ordinate)
A1-A6: correlation between the true Landsat image of Hebei and the predicted bands; B1-B6: correlation between real Landsat images of Heilongjiang and predicted bands; C1-C6: correlation between true Landsat images in Xinjiang and predicted bands.
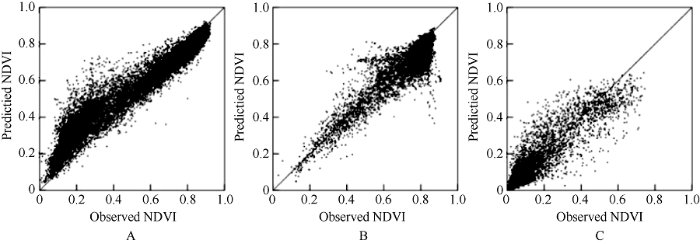
图5为3个地区原始Landsat影像NDVI值与融合后影像NDVI值的比较。决定系数R2表明融合结果与真实反射率数据之间的关系, 3个地区R2均在0.8以上, 表明相关程度较高, ESTARFM算法能够进行NDVI值的预测。
图5
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图5真实影像与融合后影像NDVI结果比较
A: 河北农区(2017-04-12); B: 黑龙江农区(2017-09-09); C: 新疆农区(2017-06-23)。
Fig. 5Comparison of NDVI results between real and fusion images
A: Hebei agricultural area (2017-04-12); B: Heilongjiang agricultural area (2017-09-09); C: Xinjiang agricultural area (2017-06-23).
表3表明, 河北农区影像在红波段相关系数低于其他各波段, 黑龙江与新疆农区各波段相关性较高, 3个区域均方根误差RMSE值均较小, 接近于0, 预测值与真实值之间的偏差不大, 表明ESTARFM模型对于我国地理区域高时空分辨率影像的生成有较好适用性。
Table 3
表3
表3原始Landsat-8 OLI影像与ESTARFM融合后结果相关性分析
Table 3
| 区域与影像获取日期 Region and acquisition date | 波段 Band | 决定系数 R2 | 均方根误差 RMSE | 方差 Variance | 平均绝对偏差 MAD |
|---|---|---|---|---|---|
| 河北Hebei | Blue | 0.8684 | 0.0451 | 0.0020 | 0.0355 |
| 2017-04-12 | Green | 0.8810 | 0.0566 | 0.0032 | 0.0447 |
| Red | 0.9446 | 0.0767 | 0.0059 | 0.0614 | |
| NIR | 0.8551 | 0.1010 | 0.0102 | 0.0741 | |
| SWIR1 | 0.9309 | 0.1029 | 0.0106 | 0.0807 | |
| SWIR2 | 0.9081 | 0.1106 | 0.0122 | 0.0901 | |
| 黑龙江Heilongjiang | Blue | 0.8913 | 0.0171 | 0.0003 | 0.0171 |
| 2017-09-09 | Green | 0.8906 | 0.0190 | 0.0004 | 0.0190 |
| Red | 0.9017 | 0.0252 | 0.0006 | 0.0252 | |
| NIR | 0.7013 | 0.0278 | 0.0008 | 0.0278 | |
| SWIR1 | 0.7775 | 0.0332 | 0.0011 | 0.0332 | |
| SWIR2 | 0.7236 | 0.0443 | 0.0019 | 0.0443 | |
| 新疆Xinjiang | Blue | 0.7842 | 0.0407 | 0.0017 | 0.0349 |
| 2017-06-23 | Green | 0.8084 | 0.0496 | 0.0024 | 0.0420 |
| Red | 0.8613 | 0.0679 | 0.0046 | 0.0594 | |
| NIR | 0.8682 | 0.0932 | 0.0087 | 0.0765 | |
| SWIR1 | 0.8817 | 0.0836 | 0.0069 | 0.0589 | |
| SWIR2 | 0.9123 | 0.0973 | 0.0095 | 0.0839 |
新窗口打开|下载CSV
2.2 新疆研究区时间序列NDVI生成
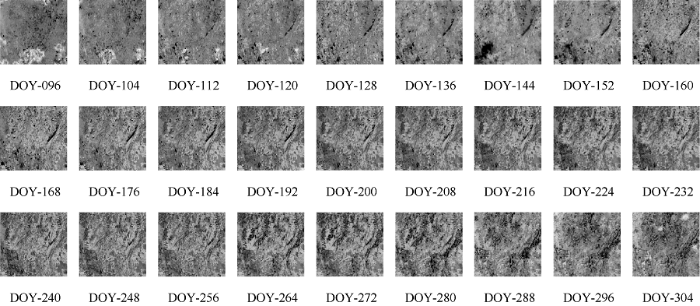
为验证ESTARFM算法的可行性, 另以新疆阿克苏地区为例, 根据新疆季节气候及作物生长情况, 选择除去冬季外的2017年4月至10月为研究时间段进行分析。图6所示为实验直接获取且可用的Landsat及MODIS影像, 统一使用年积日(DOY)表示获取的日期。Landsat影像由于云雨及其自身重访周期的影响, 数据缺失问题严重。由于4月1日(DOY-96)及10月31日(DOY-304)无Landsat影像, 故采用相近的两景3月21日(DOY-80)及11月16日(DOY-320)数据作为基准影像来预测4月1日以及10月31日影像。使用这11景Landsat数据和30景MODIS数据(时间间隔为8 d)的可见光中红波段数据及近红外波段数据。图6
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图6Landsat-8 OLI和MODIS数据的获取日期(DOY)
Fig. 6Acquisition date of Landsat-8 OLI and MODIS data (DOY)
将两期Landsat数据与对应时间的两期MODIS数据(前后2个时期)结合, 加上预测期的MODIS数据, 生成预测期当天的高空间分辨率数据。由于Landsat基准影像较少, 故需要2次预测才能生成所有缺失影像。图7所示为新疆阿克苏地区4月至10月8 d时间间隔的高时空分辨率影像(R/G/B合成中各波段对应分别为红波段、近红外波段与红波段), 绿色表示植被的时序变化情况。
图7
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图7新疆阿克苏地区8 d时间间隔的高时空分辨率影像
Fig. 7High spatial and temporal resolution of 8-day intervals in Akesu, Xinjiang
图8中左图为研究区域经ESTARFM预测后生成Landsat遥感影像(R/G/B为红波段/近红外波段/红波段)与选取的各样本点的实际位置分布情况, 图8右图中横坐标为4月6日(DOY-96)至10月31日(DOY-304)共27个时间序列号, 纵坐标为NDVI值, 各曲线表示经S-G滤波后NDVI值随时间变化的情况。ESTARFM预测后影像中植被NDVI变化情况与MODIS影像提取的植被NDVI曲线趋势一致。新疆植被生长季开始时间集中于3月中旬至5月上旬, 生长季结束时间集中于10月中旬至12月下旬。根据NDVI变化曲线可以看出, 前7个时间段(4月6日至5月16日)中植被NVDI值上升缓慢, 对应新疆地区的作物播种期。新疆作物大多一年一熟, NDVI值有一个波峰。时间序列号从19 (8月28日)开始急速下降, 是新疆地区作物成熟收获阶段, 说明ESTARFM预测影像生成的NDVI能够表征实际作物NDVI变化情况, 对于水体来说, 在红与近红外这2个波段有较高反射率, 因而NDVI呈现负值。岩石、沙漠在这2个波段有相似的反射率, 因而NDVI值近似为0, 各曲线变化趋势与实际地物NDVI值变化情况相对应。表明ESTARFM算法可以生成高时空分辨率影像, 并应用于NDVI的生成。
图8
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图8融合后影像中各地物NDVI随时间变化情况
A: 植被; B: 沙漠; C: 建筑物; D: 水体。
Fig. 8Variations of NDVI over time in images after fusion
A: vegetation; B: desert; C: building; D: water.
2.3 农作物遥感分类和长势监测
从农作物遥感分类可以客观快速获取作物的面积、分布等信息, 辅助农业统计和指挥生产。通过地面调查, 研究区的地物主要包括棉花、水稻、林地、果园、道路、村镇、沙地等。利用图7所示的4月至10月8 d时间间隔的高时空分辨率影像, 基于物候和光谱信息通过最大似然法对研究区农作物进行遥感分类, 作物空间分布如图9所示。对比地面调查和Google影像, 作物遥感分类与实际情况吻合。本区域棉花种植面积大, 分布于全图, 水稻面积次之, 主要分布在水库河流周边。果园面积分布较大, 零散分布的有小片林地, 另在村镇和道路旁有条带状林地。图9
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图9农作物遥感分类结果
Fig. 9Classification map of crop remote sensing
结合不同影像的差异, 排除其他主要因素对农作物提取的影响, 分别提取模拟影像与真实观测影像的农作物种植区域。从模拟的影像结果获取的作物面积为305.5509 km2, 根据真实观测影像作物面积识别为305.5617 km2。相差较小, 表明ESTARFM算法可以较好应用于农作物面积监测。
农作物长势遥感监测有利于遥感估产、管理处方制订、耕地地力评价等。作物的NDVI值与作物的长势间存在一定正相关, NDVI值可以作为作物长势状况的一种反映[24]。通过对当地作物时间特定生育期内(4月1日至9月30日)的NDVI值累加, 可得到阿克苏研究区作物长势监测图(图10-A), 发现作物长势存在空间差异, 同一地块内部也存在变异。将棉花与水稻的生长状况划分为稍差、持平、稍好、好4类, 棉花、水稻长势分级见图10-B、10-C。从该图可以看出, 棉花总体长势偏好, 中部及东部区域总体生长状况最佳, 西北角区域中居民地及果园、林地较多, 作物种植较少, 棉花长势一般, 南部区域棉花种植地区靠近沙地, 生长状况稍差。水稻主要分布在研究区东部及南部区域, 其他地区种植较少, 相比南部区域, 东部区域生长状况更好。
图10
 新窗口打开|下载原图ZIP|生成PPT
新窗口打开|下载原图ZIP|生成PPT图10作物长势监测和分级图
A: 作物长势监测图; B: 棉花长势分级图; C: 水稻长势分级图。
Fig. 10Crop grading and growth monitoring map
A: crop growth monitoring map; B: cotton growth grade map; C: rice growth grade map.
3 讨论
近几十年来农情监测与预报在国际上都是遥感的重要应用领域, 农业遥感对高时空分辨率数据有强烈需求。MODIS和Landsat遥感数据具有长时间序列, 免费公开数据已经过几何辐射预处理具有时空一致性是农业遥感应用的重要数据源。为解决目前农区遥感监测在特定时相高空间分辨率影像缺乏的问题, 本文利用ESTARFM高时空数据融合模型生成30 m分辨率的高时空影像, 在中国北方农业种植大省河北、黑龙江、新疆典型农区尺度上, 验证ESTARFM模型在农业种植区的适用性及可行性。ESTARFM模型在中国北方的华北、东北、西北区域能够得到缺失的高时空分辨率遥感影像, 影像地物轮廓清晰。对于河北、黑龙江和新疆的3个研究区域, 选取的基准影像日期较为相近, 未跨作物生长季节, 地物种类未过多发生剧烈变化, 各波段相关系数R2均高于0.70, 相关程度较高。均方根误差均低于0.12, 方差均低于0.02, 平均绝对偏差均小于0.09, 表明预测值与真实值偏差不大, 预测精度较高。在3个研究区域中基于生成的高时空分辨率数据提取NDVI值与真实影像生成NDVI值的对比验证中, 决定系数R2均在0.8以上。在用ESTARFM模型生成新疆阿克苏地区4月至10月8 d时间间隔NDVI曲线应用中, 预测影像生成的NDVI曲线与MODIS影像生成的NDVI曲线变化趋势一致, 说明ESTARFM模型能够预测出NDVI值随时间变化的情况。将预测后生成的影像进行长势监测, 可以很好地表现出当地作物生长趋势与实际生长状况。ESTARFM模型模拟产生的影像与原始影像接近且时序NDVI能反映作物变化, 这是因为ESTARFM模型最大限度地利用影像之间的相关性并最小化系统产生的误差, 从而提高了预测数据的准确性, 且对于异质景观, 保留了其空间细节[25]。本研究从区域尺度和多时相角度验证了ESTARFM时空数据融合模型可用于我国北方农业种植大区高时空影像的模拟生成, 该研究结果可为农业遥感监测提供可靠的数据支撑。前人研究主要是利用小区域影像探讨ESTARFM模型生成各类模拟高时空分辨率影像[26,27,28], 或 是改进模型算法[29], Knauer等[6]开展的研究表明ESTARFM适合在非洲热带地区大区域尺度上生成时间序列, 本文则利用ESTARFM模型在我国北方农业种植区域尺度上进行预测及比较, 表明该模型在农业监测方面的可行性, 丰富了研究成果。本研究中植被预测结果较为稳定, 但建筑物、水体等易受红波段和近红外波段的影响, ESTARFM预测中出现异常值, 另外该方法对于变化情况较大且未记录在基准影像的区域不能准确地预测, 在不同地区应结合实际地形特征、研究对象及当地作物生长情况应用。新疆阿克苏研究区作物大多为单季作物, 本文未考虑多季作物融合后NDVI变化情况, 在后续研究中将结合各研究区域中实际地貌对ESTARFM模型中各参数进行调整, 使之更好适用于各研究区域, 进一步提高各类作物光谱的预测精度, 其次也会对多季作物进行实验, 以更好验证ESTARFM模型的实用性。
4 结论
在我国北方种植大省河北、黑龙江、新疆典型农区, 利用高空间分辨率Landsat-8 OLI影像与高时间分辨率MODIS影像构建了30 m高时空分辨率影像数据集, 基于ESTARFM时空数据融合模型生成模拟影像, 并与真实Landsat影像对比, 表明该模型在农田区域尺度上有适用性。在新疆阿克苏影像缺失区域生成8 d时间间隔的模拟影像, 通过提取反映田块物候变化的年际NDVI曲线监测当地作物长势, 表明该模型在农业遥感应用方面有可行性。参考文献 原文顺序
文献年度倒序
文中引用次数倒序
被引期刊影响因子
DOI:10.1016/j.rse.2007.08.011URL [本文引用: 1]
DOI:10.1080/014311698215748URL [本文引用: 1]
DOI:10.3390/rs6109213URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.1109/TGRS.2006.872081URL [本文引用: 1]
DOI:10.3390/rs8050425URL [本文引用: 2]
DOI:10.1016/j.rse.2009.03.007URL [本文引用: 1]
DOI:10.1016/j.rse.2010.05.032URL [本文引用: 4]
DOI:10.1016/j.rse.2013.02.007URL [本文引用: 1]
DOI:10.3390/rs70201798URL [本文引用: 1]
DOI:10.3390/rs9111125URL [本文引用: 1]
DOI:10.3390/rs9020132URL [本文引用: 1]
DOI:10.1117/1.JRS.6.063507URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.1016/j.inffus.2015.12.005URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
DOI:10.1016/j.agwat.2017.03.028URL [本文引用: 1]
DOI:10.3390/rs8080631URL [本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
[本文引用: 1]
Magsci [本文引用: 1]

融合多源遥感数据生成高时空分辨率数据具有重要的应用价值。为了解决高空间分辨率数据重访周期长及云雨天气带来的数据短缺问题,该文基于增强自适应的遥感图像时空融合方法(enhanced spatial and temporal adaptive reflectance fusion model, ESTARFM),使用多时相MODIS数据提供地物时间变化信息,结合ASTER影像提供的空间细节信息,选择多波段数据(可见光近红外数据和地表温度数据)共同作为输入变量融合生成高时空地表温度。融合结果分别与地表红外辐射计观测温度和ASTER温度产品进行了验证。验证结果表明:基于ESTARFM方法降尺度地表温度影像清晰,融合结果与地表红外辐射计观测温度呈显著的线性正相关关系,相关系数均高于为0.71,预测得到的地表温度与真实测得的数据的平均绝对偏差均低于2.00 K,均方根误差均低于2.60 K。与ASTER地表温度产品的验证中,整体验证结果的R2均在0.95以上。此外,ESTARFM方法在各个地类中的融合效果较好,均表现出非植被区域的相关性高于植被和水体,尤其在2012年8月27日非植被的R2达到0.91。
Magsci [本文引用: 1]
融合多源遥感数据生成高时空分辨率数据具有重要的应用价值。为了解决高空间分辨率数据重访周期长及云雨天气带来的数据短缺问题,该文基于增强自适应的遥感图像时空融合方法(enhanced spatial and temporal adaptive reflectance fusion model, ESTARFM),使用多时相MODIS数据提供地物时间变化信息,结合ASTER影像提供的空间细节信息,选择多波段数据(可见光近红外数据和地表温度数据)共同作为输入变量融合生成高时空地表温度。融合结果分别与地表红外辐射计观测温度和ASTER温度产品进行了验证。验证结果表明:基于ESTARFM方法降尺度地表温度影像清晰,融合结果与地表红外辐射计观测温度呈显著的线性正相关关系,相关系数均高于为0.71,预测得到的地表温度与真实测得的数据的平均绝对偏差均低于2.00 K,均方根误差均低于2.60 K。与ASTER地表温度产品的验证中,整体验证结果的R2均在0.95以上。此外,ESTARFM方法在各个地类中的融合效果较好,均表现出非植被区域的相关性高于植被和水体,尤其在2012年8月27日非植被的R2达到0.91。
[本文引用: 1]
[本文引用: 1]
DOI:10.3390/rs10050772URL [本文引用: 1]
DOI:10.3390/rs5105346URL [本文引用: 1]
DOI:10.1016/j.rse.2016.01.028URL [本文引用: 1]
DOI:10.3390/rs8010075URL [本文引用: 1]
DOI:10.3390/rs5126346URL [本文引用: 1]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}