在系统可靠性分析中,故障树分析(FTA)是一种最常用的有效方法。然而,FTA有一定的局限性,对复杂系统的建树相当困难,特别是对有多重状态、有信号反馈和有时序功能变化的系统,FTA可能变得更为复杂[3]。GO法是一种几乎与FTA同时产生的可靠性分析方法,对于多状态、有时序的系统,尤其是有实际物流的系统更为合适,但不易处理有多重状态改变和有复杂时序的系统[4]。在GO法的基础上,日本Matsuoka和Kobayashi两位****开发了一种新的系统可靠性分析方法——GO-FLOW法[5],不仅解决了FTA建树困难的问题,而且相比于GO法,计算复杂度降低,更适用于有时序、有阶段性任务和状态随时间变化的复杂系统[6]。金霞和段富海[7]应用GO法分析了飞机EHA的可靠性;Hashim等[8]应用GO-FLOW法分析了压水堆AP1000冷却系统的可靠性;武光江等[9]应用GO-FLOW法分析了可维修系统的可靠性。
本文应用GO-FLOW法分析飞机EHA的可靠性。按照EHA结构原理图建立GO-FLOW模型,针对GO-FLOW图不允许存在循环的难题,采用一种新的解决方案,即用布尔代数求解描述反馈环的布尔方程,准确表示EHA系统的反馈信号。通过MATLAB运算和曲线拟合,得到系统在各时间点的可靠度以及随时间的变化规律。
1 EHA系统分析 EHA系统通常由控制器、电机驱动模块、270 V直流无刷电机、双向定量泵、储能罐及辅助液压阀组、作动筒等组成[10],结构原理如图 1所示。
 |
| 图 1 EHA系统结构原理图[10] Fig. 1 Structural schematic diagram of EHA system[10] |
| 图选项 |
EHA工作过程中,控制器和伺服驱动模块接受上位机的指令,驱动直流无刷电机转动,电机带动双向定量泵作旋转运动,继而控制泵输出到作动筒的高压油的流量,以容积调速方式完成对作动筒的控制。储能罐通过单向阀为系统进行补油增压,保持系统的最低压力,并防止油液中发生气穴现象,定量泵通过单向阀回油到储能罐。过滤器用来过滤液压油中的杂质,保证系统液压管道和其他设备的正常运行。
阻尼旁通阀起故障安全隔离的作用,安全阀防止作动筒的两腔内压力过高。速度、压力和位移传感器将系统的相关参数反馈给控制器,形成闭环回路,用于对系统的实时控制和监测[11]。
2 GO-FLOW法分析EHA可靠性 GO-FLOW法的主要分析过程包括建立GO-FLOW模型和完成定量计算。作动杆部件按照控制指令要求输出相应位移代表EHA系统成功工作,结合模型图和运算规则计算系统成功工作的概率,即系统的可靠度。
2.1 求解EHA反馈环 在EHA系统结构图中,闭环反馈回路为系统提供了实时准确的监测和控制。但是GO-FLOW图不允许有循环,若不能合理地求解反馈环,就不能准确地评估系统的可靠性,因此不能保证充分或最佳使用系统性能。通常,采用信号发生器简单替代反馈信号,但该方法必然会带来误差,影响可靠性分析精度。到目前为止,在求解反馈回路方面已经做了很多尝试,Matsuoka [12]提出了一个打破GO-FLOW分析逻辑回路的方法,Vaurio [13]也提出了一种递归的方法,但对于反馈回路的一般解决方法还没有给出明确的表示。本文采用布尔代数求解描述反馈环的布尔方程[14],准确表示EHA系统的反馈信号,提高了可靠性分析精度。
EHA带有反馈环的部分系统结构如图 2所示。
 |
| 图 2 EHA带有反馈环的结构图 Fig. 2 EHA structure diagram with feedback loops |
| 图选项 |
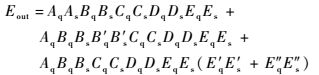
以A部件为例,将t时刻成功输出的事件集合表示为AqAs,其中Aq代表A部件成功起动的事件集合,As代表A部件的全部状态集合,其余部件的表示方法同A部件。X(=Bout)和Y(=Eout)分别表示B和E部件的成功输出事件集合,那么布尔关系式可表示为
 | (1) |
已知,X为B′部件的输入信号,Y为E′和E″部件的输入信号。同时,A、B′、E′、E″部件的输出信号是或门(OR)的输入信号,所以或门的输出信号经过B部件后得到X的表达式为
 | (2) |
整理式(1) 和式(2) 得
 | (3) |
基于布尔代数AsAs=As,1+As=1的运算思想,解式(3) 布尔方程得到
 | (4) |
式中:m1和m2是任意布尔元素。
GO-FLOW法以成功为导向,系统所有部件在t时刻成功起动,因此As=Bs=Cs=Ds=Es=B′s=E′s=E″s=1.0,即
 | (5) |
由图 2可推导出在建立反馈环后,E部件成功输出的事件集合X的表达式为
 | (6) |
比较式(5) 和式(6),可得到m1和m2的表达式:m1=Aq,m2=Aq。因此获得X(=Bout)和Y(=Eout)的表达式分别为
 | (7) |
 | (8) |
式中:第1部分代表主路作用;第2部分代表B-B′环结构作用;第3部分代表B-C-D-E-E′和B-C-D-E-E″环结构作用,翻译成GO-FLOW模型如图 3所示。
 |
| 图 3 求解反馈环的GO-FLOW图 Fig. 3 GO-FLOW chart of solving feedback loops |
| 图选项 |
2.2 构建EHA的GO-FLOW模型 GO-FLOW模型主要由操作符和信号流两部分组成[15]。结合EHA结构模型图 1和求解反馈环模型图 3,在单元功能合理划分的基础上,建立EHA系统GO-FLOW模型如图 4所示。
 |
| 图 4 EHA系统的GO-FLOW图 Fig. 4 GO-FLOW chart of EHA system |
| 图选项 |
电源信号、控制信号和油液进入信号可用类型25信号发生器操作符输出。电机和定量泵都是有激励信号才能让输入信号导通的部件,可用类型26操作符表示,导通信号可用类型25操作符输出,同时考虑部件会随着运行而失效,因此增加类型35操作符表示失效概率随时间的变化,工作时间间隔信号也用类型25操作符输出。控制器、传感器、单向阀、过滤器、安全阀和作动筒都可看作两状态元件,所以可用类型21两状态操作符和类型35随时间失效操作符表示。图 4中操作符符号水平线上的数字表示操作符的类型,水平线下的数字表示操作符的编号,信号线上的数字表示信号流的编号。图中,信号39是系统的最终输出信号。
为能更好地说明GO-FLOW法在处理阶段性任务的应用,定义EHA系统中4个时间点:
时间点1是系统初始时间点,即系统尚未开始任何动作。
时间点2是控制器信号控制电机,电机开始工作,是实际时间的0时刻。
时间点3是电机驱动泵运转的时刻,与时间点2相差无几,这里可以忽略,系统开始工作。
时间点4是时间点3之后的300 h。
表 1列出了各操作符类型、参数和含义[7],其中:R(t)为t时刻操作符的输出信号;Pp为部件提前起动的概率;Pg为部件正常工作的概率;λ为部件运行失效的概率。
2.3 GO-FLOW可靠性运算 GO-FLOW法在确定成功准则和定义时间点后,从信号发生器开始,沿信号线序列,按运算规则,逐个对操作符计算,直到得到最终输出信号在各时间点的“强度”,即系统的可靠性。图 4中关键信号流的表达式如下,其中Ii(t)表示信号i在时间点t的强度。
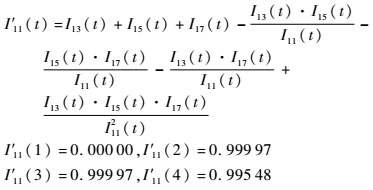
1) 信号流18:或门
首先,由于信号13、15、17都是在信号11存在的条件下才存在,它们的强度计算式中都包含信号11的强度,信号11是它们的共有信号,对共有信号进行修正后[16],得到信号13、15、17或门运算强度I′11(t)为
 | (9) |
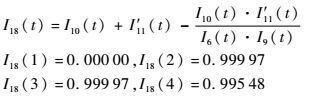
再将信号10与信号13、15、17或门运算结果进行或门运算,信号6和9是它们的共有信号,因此信号流18的强度为
表 1 EHA系统的操作符数据 Table 1 Operator data of EHA system
| 编号 | 类型 | 参数 | 含义 |
| 1 | 25 | R(1)=0, R(t)=1(t≠1) | 电源信号 |
| 2 | 25 | R(1)=0, R(t)=1(t≠1) | 控制指令信号 |
| 3 | 25 | R(2)=1, R(t)=0(t≠2) | 电机运行信号 |
| 4 | 25 | R(3)=1, R(t)=0(t≠3) | 泵运转信号 |
| 5 | 25 | R(4)=300 h, R(t)=0(t≠4) | 时间间隔信号 |
| 23 | 25 | R(1)=0, R(t)=1(t≠1) | 油液信号 |
| 6, 7 | 21, 35 | Pg=0.999 997 9, λ=2.1×10-6/h | 控制器 |
| 8, 9 | 26, 35 | Pp=12.0×10-6, Pg=0.999 973 0, λ=15.0×10-6/h | 电机 |
| 10, 11 | 30 | 与门 | |
| 12, 13 | 21, 35 | Pg=0.999 999 5, λ=0.5×10-6/h | 速度传感器 |
| 14, 15 | 21, 35 | Pg=0.999 999 5, λ=0.5×10-6/h | 位移传感器 |
| 16, 17 | 21, 35 | Pg=0.999 999 5, λ=0.5×10-6/h | 压力传感器 |
| 18 | 22 | 或门 | |
| 19, 20 | 26, 35 | Pp=0.0, Pg=0.999 988 0, λ=12.0×10-6/h | 泵 |
| 21, 24, 30 | 21 | Pg=0.999 998 8 | 单向阀 |
| 22, 25, 31 | 35 | λ=1.27×10-6/h | 单向阀 |
| 26, 32 | 21 | Pg=0.999 992 0 | 过滤器 |
| 27, 33 | 35 | λ=8.0×10-6/h | 过滤器 |
| 28, 34 | 21 | Pg=0.999 996 2 | 安全阀 |
| 29, 35 | 35 | λ=3.8×10-6/h | 安全阀 |
| 36, 37 | 30 | 与门 | |
| 38, 39 | 21, 35 | Pg=0.999 999 6, λ=0.4×10-6/h | 作动筒 |
表选项
 | (10) |
2) 信号流36:与门
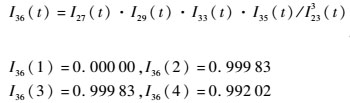 | (11) |
3) 信号流38
 | (12) |
4) 信号流39
 | (13) |
因为I5(1)=I5(2)=I5(3)=0.0,得到
I39(1)=I38(1)=0.000 00
I39(2)=I38(2)=0.000 00
I39(3)=I38(3)=0.999 79
因为I5(4)=300.0,得到
I39(4)=I38(4)·exp(-λI5(4)×1.0)=0.983 48
所有操作符计算完成后,得到了EHA系统输出信号流22、36、39在所有时间点的强度,如表 2所示。
表 2 EHA系统输出信号的强度 Table 2 Output signal intensity of EHA system
| 操作符 编号 | 操作符 类型 | 输出信号在各时间点的强度 | |||
| 1 | 2 | 3 | 4 | ||
| 22 | 35 | 0.000 00 | 0.000 00 | 0.999 96 | 0.991 51 |
| 36 | 30 | 0.000 00 | 0.999 83 | 0.999 83 | 0.992 02 |
| 39 | 35 | 0.000 00 | 0.000 00 | 0.999 79 | 0.983 48 |
表选项
3 与GO法比较 利用GO法分析上述EHA系统,同样地,根据系统原理图,用GO法相应操作符表示系统部件,用GO法信号流表示系统的输入和输出以及部件之间的关联,并应用2.1节求解反馈环的方法,建立系统GO模型如图 5所示。
 |
| 图 5 EHA系统GO图 Fig. 5 GO chart of EHA system |
| 图选项 |
系统有3个状态:提前状态、成功状态和故障状态。根据表 1所列的状态概率,所有操作符按照GO法运算规则计算完成后,得到了EHA系统输出信号流22各个状态的概率,提前状态概率Pp=0.000 00,成功状态概率P=0.999 787 315 8,故障状态概率λ=1-Pp-P=2.126 842×10-4。
由表 2列出的GO-FLOW法分析结果可知,系统在开始工作时刻的可靠度为0.999 787 316 1,由于系统部件会随时间失效,所以随着时间的推移,系统可靠度降低,在工作300 h后的可靠度为0.983 482 232 9。根据GO法分析结果可知,系统处于成功状态的概率,即系统的可靠度为0.999 787 315 8。由于本文GO法的分析过程未考虑系统部件状态的变化,所以GO法可靠度计算结果等同于GO-FLOW法开始工作时刻的可靠度,可见两种方法的计算结果差异非常小,基本吻合。GO法已经成熟,其可行性已得到充分验证,因此,GO-FLOW可靠性分析方法是可行的,其结果是准确的,并且相比于GO法,GO-FLOW法只需一次运算,就可得到系统在各时间点的可靠度。而两种方法的计算结果又不完全相等,因为两种方法的基本概念和算法有差异,所以导致两种方法的计算结果有一定的差别。
4 系统可靠度的变化规律 为了能更直观地了解EHA系统工作时可靠度的变化规律,在时间点3和时间点4之间以50 h为间隔插入5个时间点,因时间点2是实际时间的0时刻,而时间点3与时间点2相差无几,这里可以忽略,因此将时间点3看成0时刻,计算从0开始到300 h各时间点操作符22、36、39的输出信号强度,如表 3所示。
表 3 EHA系统各时间点输出信号的强度 Table 3 Output signal intensity of EHA system at each time point
| 时间/h | 信号强度 | ||
| 操作符22 | 操作符36 | 操作符39 | |
| 0 | 0.999 96 | 0.999 83 | 0.999 79 |
| 50 | 0.998 55 | 0.998 52 | 0.997 05 |
| 100 | 0.997 13 | 0.997 22 | 0.994 32 |
| 150 | 0.995 73 | 0.995 92 | 0.991 60 |
| 200 | 0.994 32 | 0.994 62 | 0.988 89 |
| 250 | 0.992 92 | 0.993 32 | 0.986 18 |
| 300 | 0.991 51 | 0.992 02 | 0.983 48 |
表选项
由表 3可直观得到EHA系统从开始工作后每隔50 h各信号强度的变化规律,随着系统各部件的顺序动作和时间的推移,系统的信号强度随时间降低。为了更形象地描述这个规律,运用MATLAB对表中信号流39的强度进行线性拟合,得到系统可靠度变化规律如图 6所示。
 |
| 图 6 EHA系统可靠度变化规律 Fig. 6 System reliability changing rule of EHA |
| 图选项 |
MATLAB拟合得到曲线的函数表达式为R(t)=-5.435 70×10-5t+0.999 77。由该表达式可以快速而准确地计算出EHA系统在任意时刻的工作可靠度,以便及时对系统进行检修和维护。
5 结论 1) 研究了GO-FLOW法在EHA系统可靠性分析中的应用。采用布尔代数求解描述反馈环的布尔方程,解决了模型中不允许存在循环的难题,并将计算结果与GO法的结果相比较,验证了GO-FLOW法的可行性与准确性,得到了系统在各时间点的可靠度以及随时间的变化规律,便于及时对系统进行检修和维护。
2) 充分挖掘了GO-FLOW法分析系统可靠性的优势,只需进行一次运算,就可得到系统最终信号在所有时间点的强度,完成对有复杂运行时序且状态随时间变化的系统可靠性分析。若采用GO法对大型的复杂系统进行分析计算,由于需要庞大的内存支持,往往难以获取最终信号存在概率的精确值。因此,GO-FLOW法能凭借其独特的优势为可靠性工程的深入研究提供重要支持。
参考文献
| [1] | 李军, 付永领, 王占林. 机载电静液作动系统的发展现状与关键技术研究[J].航空制造技术, 2005(11): 73–77. LI J, FU Y L, WANG Z L. Present development status and key technology research of airborne electro-hydrostatic actuation system[J].Aeronautical Manufacturing Technology, 2005(11): 73–77.DOI:10.3969/j.issn.1671-833X.2005.11.015(in Chinese) |
| [2] | 付永领, 邵云滨, 齐海涛, 等. 集成电动静液作动系统理论与技术[J].液压与气动, 2015(5): 1–9. FU Y L, SHAO Y B, QI H T, et al. Integrated electro-hydrostatic actuator system:Theory and technology[J].Chinese Hydraulics & Pneumatics, 2015(5): 1–9.(in Chinese) |
| [3] | WANG Y Y, ZHOU J J, CHEN W G. Assessment method for the reliability of power transformer based on fault-tree analysis[J].High Voltage Engineering, 2009, 35(3): 514–520. |
| [4] | 沈祖培, 黄祥瑞. GO法原理及应用[M].北京: 清华大学出版社, 2004: 57-168. SHEN Z P, HUANG X R. Principle and application of GO methodology[M].Beijing: Tsinghua University Press, 2004: 57-168.(in Chinese) |
| [5] | MATSUOKA T, KOBAYASHI M. GO-FLOW:A new reliability analysis methodology[J].Nuclear Science & Engineering the Journal of the American Nuclear Society, 1988, 98(1): 64–78. |
| [6] | 林洁. GO-FLOW原理及其计算机辅助技术[D]. 长沙: 国防科学技术大学, 2003: 9-35. LIN J.Research on the principles and the computer aided technology of the GO-FLOW[D].Changsha:National University of Defense Technology, 2003:9-35(in Chinese). |
| [7] | 金霞, 段富海. 基于GO法的电动静液作动器可靠性分析[J].大连理工大学学报, 2013, 53(6): 846–850. JIN X, DUAN F H. Reliability analysis on electro hydrostatic actuator based on GO methodology[J].Journal of Dalian University of Technology, 2013, 53(6): 846–850.DOI:10.7511/dllgxb.2013.6.010(in Chinese) |
| [8] | HASHIM M, YOSHIKAWA H, MATSUOKA T, et al. Quantitative dynamic reliability evaluation of AP1000 passive safety systems by using FMEA and GO-FLOW methodology[J].Journal of Nuclear Science & Technology, 2014, 54(4): 526–542. |
| [9] | 武光江, 王勇, 尚彦龙, 等. 基于GO-FLOW方法的可维修系统可靠性分析[J].核动力工程, 2012, 33(2): 25–29. WU G J, WANG Y, SHANG Y L, et al. Reliability analysis of repairable system based on GO-FLOW methodology[J].Nuclear Power Engineering, 2012, 33(2): 25–29.(in Chinese) |
| [10] | KANG R, JIAO Z, WANG S, et al. Design and simulation of electro -hydrostatic actuator with a built-in power regulator[J].Chinese Journal of Aeronautics, 2009, 22(6): 700–706.DOI:10.1016/S1000-9361(08)60161-2 |
| [11] | 赵静静. 基于GO法的电静液作动器可靠性研究[D]. 大连: 大连理工大学, 2014: 3-4. ZHAO J J.Reliability analysis on electro hydrostatic actuator based on GO methodology[D].Dalian:Dalian University of Technology, 2014:3-4(in Chinese). |
| [12] | MATSUOKA T. A method to solve logical loops in the GO-FLOW methodology[C]//Proceedings of PSAM-V, International Conference on Probabilistic Safety Assessment and Management, Osaka, 2000, the International Association for PSAM.London:Springer, 2000:1461-1465. |
| [13] | VAURIO J K. A recursive method for breaking complex logic loops in Boolean system models[J].Reliability Engineering and System Safety, 2007, 92(10): 1473–1475.DOI:10.1016/j.ress.2006.09.020 |
| [14] | MATSUOKA T. An exact method for solving logical loops in reliability analysis[J].Reliability Engineering and System Safety, 2009, 94(8): 1282–1288.DOI:10.1016/j.ress.2009.01.007 |
| [15] | YU J, YU S, SONG Y M, et al. Application of GO-FLOW methodology to the reliability evaluation in CNC machine tools[J].Advanced Materials Research, 2013, 694-697: 1833–1837.DOI:10.4028/www.scientific.net/AMR.694-697 |
| [16] | 林洁, 颜兆林, 龚时雨, 等. GO-FLOW方法及其改进的精确算法[J].系统工程与电子技术, 2005, 27(1): 193–196. LIN J, YAN Z L, GONG S Y, et al. GO-FLOW methodology and improved exact algorithm[J].Systems Engineering and Electronics, 2005, 27(1): 193–196.(in Chinese) |
