��ǰ�ڸ߹�����ǵ����������о���,��Ҫ������2������:һ�Dz������������������ĵ��������Dz����������ǵ������ջ���ȫ������ϵͳ(GNSS)������ǰ�����ù�ѧ��������õ�����(��������̫�����������Ǻͺ���)��Ϣ��������λ�õĽ���,�������ڸ߹���۲��ƽ��������,���µ�һʹ�����ĵ����������и߹������λ��ȷ�����Ƚϵ͡���������Ҫ���о� GPS �߹�����ǵ���������,�˷���Ҳ�����ŵ���������������źż��θ��Dz��ȱ��[1]��
X���������ǵ���(XNAV)��һ��ȫ�µĺ�����������������,����ңԶ������X��������������Ϊ��λ�Ļ�,�������൱�ߵ�ȷ�ԺͿɿ��ԡ�ͬʱ����̫��ϵΪ�ο���,��˾���Ϊ�С��߹�������ṩ����ȷ��ʱ�䡢λ�ú���̬������,��Ϊ�߹�����ǵ����������ṩһ���µĽ��;��[2]��Ŀǰ,�����ǵ���ϵͳ�������Դ�������ij����Ρ�����X����̽�����ijɱ��ͼ������ն��ϸ�,�����еĵ����㷨�����ͬʱ�۲�3~4�������������е�������,��������������˺�������Ч�غɵĸ�������,ͬʱ�Ժ�������̬����Ҫ��Ҳ�ܸߡ����,����������˵�X����̽������������[3],���ܸõ������ǵ���ϵͳ������ŵ�,���ɹ۲��Խϲ�,���ѵ���Ӧ���ڳ���������������С�����ǰ���о���������˷�ʱ��ʵʱ�۲������ǵĵ�̽������������[4],�÷�����Ч����˵�������ϵͳ�ɹ��Բ������,������ÿһʱ�ε����۲���Ϣ�������,ʹ�õ���������ȶ��ǹ۲���һ�����͡�
�����������,�������һ�ֻ�������۲�ֵ�ĸ߾��ȵ����������ǹ���ϵ��·������÷����Ļ���˼����:�ڳ����ڵ�X���������ǵ��ź�(��������)�γ��ڼ�,�����㷨��������۲�ֵ,ʹ��۲��������ǹ�۲�����ͬ�����ɴ�ʹ�����������ǹ���ϵ��˲�����ÿһʱ�̾���3���۲�ֵ�������,���൱�ڵ���ϵͳʼ���ܹ��۲3���۲�����Ϣ,�Ӷ���������˵���ϵͳ���ȡ�
1 �������ǵ���ϵͳ 1.1 �����Ǹ߽�ʱ�䴫������ ͼ 1Ϊ̫��ϵ����(SSB )�ο�ϵ��X�������������崫��ʾ��ͼ[5]��ͼ��: n Ϊ�����Ƿ���λ������ d �� rSSB �ֱ�Ϊ�����Ǻ�SSB�����̫�����ĵ�λ��ʸ���� rsat Ϊ��������� SSB ��λ��ʸ����
 |
| ͼ 1 X�������������崫��ʾ��ͼ[5] Fig. 1 Schematic diagram of pulsar propagation of X-ray pulsar[5] |
| ͼѡ�� |
�������ǵ���������Ҫ�����������嵽�ﺽ������ʱ��(Time of Arrival,TOA),λ�õ����������������Ԥ�Ƶĵ���ʱ��֮��������ʵλ�ú�Ԥ��λ��֮��,���ò�ֵ��Ԥ��λ�ý���У������������������Ǵ����� SSB ��ʱ���ӳ�������Ҫ���ӳ����ɼ��ξ��������[6]���������崫���������ܵ�̫��ϵ����������,��˴������ӳ�����Ҫ�����������Ĺ��������ЧӦ����ӳʱ���ӳ�������ѧģ�;������������崫�����̡���ʵ�������ǵ�����,�ܵ�����������������,��������������,�������ЧӦ��Ӱ�첻�ɺ���[7-8]���������ǵ���ʱ�����2�λ���,һ���������ǵ�SSB�Ĺ��źŴ���·��,һ���������ǵ��������Ĺ��źŴ���·��,2����ֵõ��Ľ�����,���������������ٶ�,�ɵ�ͬһ��X ������������ǵ� SSB �Ĵ���ʱ��Ϊ
 | (1) |
ʽ��: tSSB �� tsat �ֱ�Ϊͬһ�� X �������嵽�� SSB�����ǵ�ʱ�䣻cΪ����; d0 Ϊ�����ǵľ��롣ʽ(1)��ʽ�ұߵ�1��Ϊ�����ӳ�,��2����3��ΪRoamer �ӳ�,�������Ӳ�Ӱ������������ڸ߹������,���ξ����ӳ�Ϊ����Ҫ������,��2��Ϊ10-7 s����,��Ч������10~100 m��Χ��,��3��Ϊ10-9 s����,��Ч������1 m����[9]������Ŀǰ�߹���������������ľ���ָ��ͨ���ڼ���m��Χ,��˵�2�͵�3���Ӱ�첻�ɺ��ԡ�
1.2 ״̬���� ѡ�����ͬ�����ǹ���о��߹�����ǵĵ���ϵͳ���Ժ�������λ�ú��ٶ���Ϊ״̬����,��״̬����Ϊ
 | (2) |
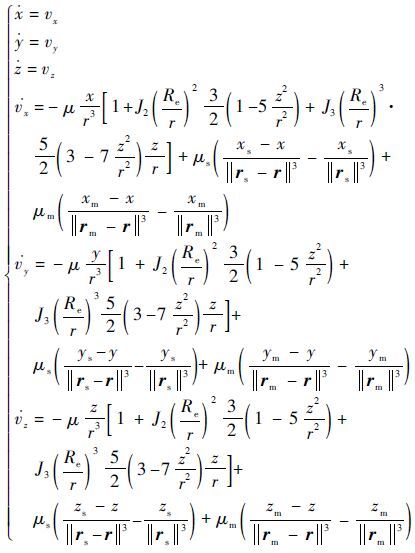
ʽ��: X(t)=[x y z vxvyvz]T Ϊ״̬����,x��y��z�ֱ�Ϊ����������λ�ñ���,vx��vy��vz�ֱ�Ϊ�������������ٶȱ����� g(X,t) Ϊ״̬����ѧ�ķ����Ժ����� ��(t) Ϊ��������ǵ��������������Ҫ��J2��J3��Ĵ�г���㶯,̫�����������ļ��ٶ��Լ��������������ļ��ٶ�,����ѧ��������[10]:
 | (3) |
ʽ��: r=(x,y,z) Ϊ����������ڵ������ĵ�λ��ʸ���� r Ϊ��������Ե������ĵľ��룻 Re Ϊ����뾶�� rs=(xs,ys,zs) �� rm=(xm,ym,zm) �ֱ�Ϊ�����������̫�����������ĵ�λ��ʸ���� (vx,vy,vz) Ϊ����������ڵ������ĵ��ٶȣ���Ϊ����������������mΪ����������������sΪ̫����������������δ���ǵĸ߽��㶯����Ϊϵͳ����,һ�����������˹����������������ʽ(3)�Ľ��ֱ�����Ľ�Runge-Kutta����ֵ����õ���
1.3 ���ⷽ�� ���� X �������� TOA ��������ʽ(1),���� TOA ������λ��֮����������¹�ϵ[11-12]:
 | (4) |
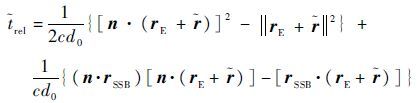
ʽ��: trel Ϊʽ(1)�еĸ߽��SSB��������������ߵ�λ�ù�ϵ����:
 | (5) |
ʽ��: rE Ϊ�������SSB��λ��,��̫��ϵ��������(�� JPL �� DE405 ��)������
��ʽ(5)����ʽ(4)��
 | (6) |
ʽ(6)Ϊ���� X �������崫�������Ƶ��õ��� XNAV ϵͳ�����۲ⷽ��,�÷��̲�������TOA ��Ϊ�����۲���,����õ�����������Ҫ�Ĺ۲�����Ҫ�õ����ǵ�λ�� r ,��Ҫ����� trel ,���� trel ������λ��r�ĺ���,Ϊ���ʱ��ì��,��Ԥ���õ�������λ�� ����õ� trel �Ĺ���ֵ rel :
 | (7) |
�����X�������������ⷽ�̿ɼ�Ϊ
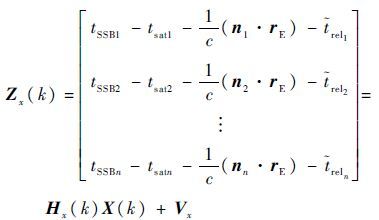 | (8) |
ʽ��: tSSBi Ϊ��i�������ǵ���SSB��ʱ�䣻 tsati��reli �� ni �ֱ�Ϊ��i�������ǵ��ﺽ������ʱ�䡢�߽������ʱ������巽��ʸ����i=1,2,��,n�� Vx ΪX�������������� Hx Ϊ�������,�䶨��Ϊ
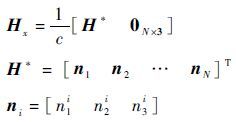 |
���ڵ������ǵ���,ȡN=1,��
 | (9) |
2 �����������ǹ��ں��˲��� 2.1 �˲������ ������Я������X����̽����������������������ƽ�ǽ��й۲�[13]��������ϵͳ̽����ѡȡ���۲������� 1��ʾ��
�� 1 ������ϵͳ̽����ѡȡ���۲��� Table 1 Selection of detector and observation of navigation subsystem
| ��ϵͳ | ̽���� | �۲��� |
| ������ | X����̽���� | ���嵽��ʱ��t |
| �ǹ�1 | ��ƽ��/�������� | �ǹ����� ��1 |
| �ǹ�2 | ��ƽ��/�������� | �ǹ����� ��2 |
��ѡ��
�����ϵͳ���ⷽ��Ϊ
 | (10) |
ʽ��:��tΪ tSSB �� tsat �IJ�ֵ,��ʽ(6)�� ��1�ͦ�2 �ֱ�Ϊͬʱ�۲��2�ŵ������ǵ��ǹ����ǣ�
 | (11) |
ʽ��: s1=[s1xs1ys1z] Ϊ��1�ŵ������ǹⷽ��ʸ���� s2=[s2xs2ys2z] Ϊ��2�ŵ������ǹⷽ��ʸ��������ʽ�������˲��㷨�����ͼ 2��ʾ���ܹ���õ���λ�õ�ȫ�����Ź���[14]��
 |
| ͼ 2 X���ߵ����������ǹ������ʽ�������˲���� Fig. 2 Design of centralized Kalman filter of integrated single X-ray pulsar and starlight navigation |
| ͼѡ�� |
2.2 �ɹ���֤������� ��ɢ�������ѧģ��[15]Ϊ
 | (12) |
ʽ��: Xk+1��Xk �ֱ�Ϊk+1ʱ�̺�kʱ�̵�״̬���� ��k+1,k Ϊkʱ�̵�k+1ʱ�̵�һ��ת�ƾ��� Wk Ϊģ������ ��
���ü�J2ģ��ʽ[15]�õ�
 | (13) |
 | (14) |
 | (15) |
ʽ��:

��ʽ(6)��ɢ�Ĺ۲ⷽ��[15]Ϊ
 | (16) |
ʽ��: Zk Ϊkʱ�̹۲���� Vk Ϊ����������
 | (17) |
ʽ��: nk=[nxnynz] Ϊ�����ǵ����߷���ʸ����
 |
��ʱϵͳ�Ŀɹ��Ծ��� V ��ʾΪ
 | (18) |
��ʽ(13)��ʽ(17)����ʽ(18)����,���� S ��ÿ��Ԫ�ص�����Ϊ


����ʽ(19)��
1) �� nk��0,h1��0,h2��0 ,��rank(V)=6,ϵͳͬʱ���Խ��յ��������Ǽ������ǹ��ź�,ϵͳ��ȫ�ɹۡ�
2) �� nk=0 ,�� rank(V)=4 ����ʱ,�����������γɹ�����,���������������źű�����,ϵͳ���ɹۡ�
 | (19) |
3 ������Ԥ�ⷽ�� 3.1 ����۲�ֵ��Ԥ�� ��X���������ǵ���,�������ź�̽�����������X����Դ�����ܶ�Ӱ��,��Ҫ��ʱ��Ĺ۲���ܻ�ýϸߵIJ�������,���,X���������ǹ۲�IJ�������һ��Ҫ�ڼ���s����,���ǹ�۲�IJ������ڿ��Դﵽ��s��������ͼ 3������X�������������ǹ������ʱ��Ĺ�ϵ��
 |
| ͼ 3 X���ߵ����������ǹ���ϵ���ʱ��ͼ Fig. 3 Sequence diagram of integrated single X-ray pulsar and starlight navigation |
| ͼѡ�� |
ͼ 3��TsiΪ�ǹ������ʱ���(����Ϊ��5 s)��,TXiΪX���������ǵ�����ʱ���(����Ϊ500 s)�����Կ���,��X�����������źŵ����β����ڼ�,�ܹ����ǹ���ж�ι۲�,��:TX1��TX2 2��ʱ���֮��,������Ts2,Ts3,��,Ts101�ȶ�㴦��Ƶ�ʵػ���ǹ�۲�ֵ,����۲�ֵ����ʽ(8)���������ڡ�ʱ����������,��������������ݼ����ԵͲ���Ƶ�ʵ�X�����������źŽ�������۲�ֵ����,�����˼����:����X���������Dz������ڵ�2��ʱ���TX1��TX2,��۲�ֵ�ֱ�ΪZX1��ZX2����TX1��TX2֮���Ӧ�ǹ��Ƶ�ʹ۲�ʱ�������һ��X���������ǹ۲�ֵ ZX1n=Z^X11Z^X12��Z^X1n ��ʱ����ͼ 4��ʾ��
 |
| ͼ 4 ����۲�ֵʱ��ͼ Fig. 4 Sequence diagram of virtual observation value |
| ͼѡ�� |
Ԥ��۲�ֵ Z^X1i Ϊ
 | (20) |
ʽ��:hX1Ϊ�����Թ۲⺯������ͨ���������ʵ�ʹ۲�ֵZX1ѧϰ�õ��� X^i Ϊ��iʱ��״̬����ֵ�� vi Ϊ�۲���ͬ��,ϵͳ����ʵ�ʹ۲�ֵZX2�õ���һ��Ԥ��۲�ֵ ZX2n=[Z^X21Z^X22��Z^X2n] ,�������ơ�
��ͼ 2�ļ���ʽ�������˲��㷨����,���Ե�����������۲�ֵ��,�˲�ϵͳ��ÿһʱ�̾��ɻ��3���۲�ֵ,�ٸ���2.2�ڿɹ��Է�����֪,��ʱ����ϵͳ��ȫ�ɹ�,ͬʱ,����ÿһʱ�̶���۲�ֵ�����˲�,ϵͳ���ȵõ������ߡ�
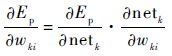
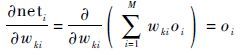
3.2 ������Ԥ������۲�ֵ ����ʽ(8)��֪,�۲ⷽ���Ƿ����Ե�,�����������Ӧѧϰ������������Թ۲�ֵ���й��ơ�����(BP)��������һ�ֶԷ����Կ���������Ȩֵѵ���ĵ������ǰ�����硣�����о�����:BP�������ܹ������⾫�ȱƽ��κ����������������BP������,�� [x y z vxvyvz] 6��״̬����Ϊ������Ԫ,���Թ۲�ֵ Z^X1i Ϊ��������Ԫ�������õ�ǰʵ�ʵõ���X���������ǹ۲�ֵ��Ϣ����ѧϰ,����Ȩֵ�����ø�ѧϰ�����õ�Ȩֵ�Ժ���Ĺ۲�ֵ����Ԥ��[16],���岽������:
1) �������ǰ�����
��Ԫ���� o :kʱ�̵�״ֵ̬ Xk ��
 |
���������:
 | (21) |
�������� ok :
 | (22) |
ʽ��: f(��) Ϊ�����,����ȡ f(x)=x��wki Ϊ�������Ȩϵ�� ��
2) �����ͼ�Ȩϵ���ĵ���
�������������
 | (23) |
ʽ��: dk Ϊ�������,�˴�ΪX���߹۲�ֵ Zk ��
 | (24) |
ʽ��: �� Ϊѧϰ����, �� ��0
 | (25) |
 | (26) |
ʽ��:

 | (27) |
 | (28) |
ʽ�У�fk(x)Ϊ��ǰʱ��k�Ļ������
3) BP�����繤��������ͼ 5��ʾ��
 |
| ͼ 5 BP����������ͼ Fig. 5 Flowchart BP neural network |
| ͼѡ�� |
ͨ��ͼ5������Ԥ��Ĺ۲�ֵ����:
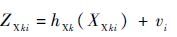 | (29) |
ʽ��: hXk �����������kʱ�̵�ʵ�ʹ۲�ֵ ZXk �Լ���״ֵ̬ Xk ѧϰ�õ���Ȩֵ wk ��ϵõ���
4 ������֤������ 4.1 �������� 1) ѡ��J2000.0���ij����������ϵ��
�����Ϣ:���DZ�ƹ��������STK��������������볤��Ϊ42 164 km,ƫ����Ϊ0.000 2,������Ϊ0��,���ص����Ϊ0��,������ྭΪ193�㡣
2) ��ʼ������λ�ó�ʼλ�����Ϊ500 m,�ٶ����Ϊ5 m/s��
3) ̽����������X����̽�����۲�ʱ��Ϊ500 s���ǹ�̽�����۲�ʱ��Ϊ5 s��
4) ̽�������ȣ�X����̽��������Ϊ0.1 ��s���ǹ�̽��������Ϊ10-5 rad��
4.2 ������ ����3.2���㷨��2.1�ڵļ���ʽ����˲�ϵͳ��X���������źŹ۲�ֵ����,�����е������㣬������ͼ 6��ʾ��
 |
| ͼ 6 ��������������۲�ֵ����ϵ���λ��������ٶ���� Fig. 6 Position error and speed error of integrated navigation based on virtual observation value using neural network |
| ͼѡ�� |
��ͼ 6�ɼ�,ͨ������������Ĺ۲�ֵʹ�˲������������,���ﵽ��259.79 m�ĸߵ������ȡ�ͼ 7Ϊû�ж�X���������ǽ��й۲�ֵ����������˲���ϵ�����λ����������Աȿ���,���������˲������ϵͳ�ɹ۲�������,����X����������500 s����(�γ���������ʱ��)�����ڽ���ʹ���ǹ�۲�ֵ���е����˲�,�Ӷ������˵������ȡ��� 2չʾ��2�ֵ����˲��ڸ����ϵ�λ�����,���Կ���,ͨ����������۲�ֵʹ�����ϵ�λ�������õ��˽Ϻõ����ơ�
 |
| ͼ 7 �����˲���ϵ���λ����� Fig. 7 Position error of integrated navigation using federated filter |
| ͼѡ�� |
Ϊ��֤���������������۲�ֵ����ȷ��,������۲�ֵ��ʵ�ʹ۲�ֵ���бȽ�,��ͼ 8��
 |
| ͼ 8 ������Ԥ��۲�ֵ��ʵ�ʹ۲�ֵ�Ƚ� Fig. 8 Comparison of virtual observation values using neural network and real observation values |
| ͼѡ�� |
�� 2 X������Ԥ��۲�ֵ����Ԥ��۲�ֵ�ĵ�������Ƚ� Table 2 Comparison of navigation results between predi-cted and non-predicted observation value of X-ray pulsar
| ���� | λ�ù������/m | |||
| x�� | y�� | z�� | Er | |
| �۲�ֵԤ�� | 194.36 | 67.48 | 158.62 | 259.79 |
| �۲�ֵԤ�� | 227.94 | 167.39 | 187.93 | 339.55 |
| ע��ErΪ��λ�����(3�����ľ�����)�� | ||||
��ѡ��
��ͼ 8��֪,������Ԥ�������۲�ֵ��ʵ�ʹ۲�ֵ������ȫһ��,˵����������Ԥ��Ĺ۲�ֵ���кܸߵ�ȷ�ȡ�ͼ 9Ϊ5�������ڵ�����۲�ֵ��ʵ�ʹ۲�ֵ�IJ�ֵ,����������10-7������,˵��ÿ������������۲�ֵ����ʵ�ʹ۲�ֵ������С�ķ�Χ�ڲ�����
 |
| ͼ 9 ����������۲�ֵ��ʵ�ʹ۲�ֵ֮�� Fig. 9 Difference between virtual observationvalue using neural network and real observation value |
| ͼѡ�� |
ͼ 10�Ƿֱ�����������Ͷ���ѧ����2�ַ�����X��������������۲�ֵ�ľ��ȱȽϡ����Կ�����ͨ������������Ĺ۲�ֵ�ľ���ƽ���ܹ��ﵽ10-7����,����ڹ۲�ֵ��ΧΪ0.001%~0.003%,������ѧ��������Ĺ۲�ֵ�ľ���ƽ��Ϊ10-6������������Ϊ�ϴ�ij�ʼ����ϵͳ������,����ʹ�ö���ѧȷ���ƹ۲�ֵ����������ͨ���㹻������ѵ����,������ȷ�ƽ���ʵ�۲�ֵ�����������,ǰ�߲������ȽϺ��߸�,����Ԥ��ֵƽ��,�˲�ϵͳ�ɿ���ǿ��
 |
| ͼ 10 �������붯��ѧ��������۲�ֵ�������ȱȽ� Fig. 10 Accuracy comparison of neural network and dynamic prediction method of virtual observation value |
| ͼѡ�� |
������۲�ֵ���ڷֱ�ȡΪ5��50��250 s,��ͨ��2.1�ڵļ���ʽ����˲�ϵͳ���е�������,�����Ƚ���ͼ 11��ʾ��
 |
| ͼ 11 ����۲�ֵ���ڶԵ������ȵ�Ӱ�� Fig. 11 Influence of period of virtual observation value on navigation accuracy |
| ͼѡ�� |
��ͼ 11�п���,����۲�ֵ������ԽС,�䵼������Խ�ߡ��� 3��ϸ�г��˲�ͬ����۲�ֵ���ڵĵ���ϵͳ�����ϵ�λ�þ��ȡ����Կ���,��������۲�ֵ�����Ӵ�,�����ϵĵ������Ⱦ��������½���
�� 3 ��ͬ����۲�ֵ���ڶ�Ӧ�ĸ����ϵĵ���λ����� Table 3 Navigation position error of each axis corresponding to different virtual observation value periods
| �˲�����/s | λ�ù������/m | |||
| x�� | y�� | z�� | Er | |
| 5 | 194.36 | 67.48 | 158.62 | 259.79 |
| 20 | 197.72 | 70.67 | 161.23 | 264.73 |
| 50 | 200.45 | 72.45 | 164.78 | 269.41 |
| 250 | 223.46 | 81.78 | 184.86 | 301.32 |
| 500 | 234.78 | 86.32 | 193.36 | 316.17 |
��ѡ��
Ϊ�˷������⾫�ȶԵ��������Ӱ��,�ֱ����X���ߵ������ǹ��ȡ��ͬ�����⾫��,����X���ߵ����۲���Ϊʱ���,����һ��Ϊ��s����,��10-7~10-6 s,�ǹ���۲���Ϊ�ǹ�����,����һ��Ϊ10-4~10-5 rad,�õ��ĵ��������ͼ 12��ͼ 13��ʾ��
 |
| ͼ 12 X�������⾫�ȶԵ������ȵ�Ӱ�� Fig. 12 Influence of X-ray measurement accuracy on navigation accuracy |
| ͼѡ�� |
ͼ 12��ͼ 13�ֱ�������X���ߺ��ǹ�2����ϵͳ�Ĺ۲⾫�ȶԵ���ϵͳ��Ӱ��,�������ԽС,�����ԽС���Ƚ�ͼ 12��2������,���Կ���,��ͬ�����⾫�ȵ�������,����ԽС����Խ��,Ҳ����˵����ͬ���ĵ�����������,��������ԽС,���̽���������⾫������Խ�͡������ñ��ĵ���������۲�ֵ�ķ���,���Դﵽ�߾��Ȳ����豸����ͬЧ��,�ɴ˴���˵���ϵͳ��ʹ�óɱ���
 |
| ͼ 13 �ǹ����⾫�ȶԵ������ȵ�Ӱ�� Fig. 13 Influence of starlight measurement accuracy on navigation accuracy |
| ͼѡ�� |
ͼ 14�����˵����������ǹ���ϵ���ϵͳ���������ϵͳ���⾫��֮��ı仯��ϵ�����Կ���,���ڵ����������ǹ���ϵ���,�ǹ���ں���Ҫ�ǽ����ϵͳ�ɹ۲�������,������ϵͳ�ľ�������Ҫȡ��X���������ǵĵ������ȡ�
 |
| ͼ 14 ��ϵͳ���⾫�ȶԵ������ȵ�Ӱ�� Fig. 14 Influence of measurement accuracy of subsystem on navigation accuracy |
| ͼѡ�� |
�� 4Ϊ������ϵ���ϵͳ�ľ��ȶԱȡ��ȽϿ���,ֱ�����е�ƽ���ǹ��ϵͳ�ľ��Ƚϵ͡�����3��X���������ǵĵ������Ƚϸ�,����Ҫ�϶��X����̽����,��ʵ���Խϲ����2���ǹ��1�������ǵ������˲���ϵ�������,�����ֲ���һ�ǹ�ĵ;��Ⱥ��������X����̽�����IJ��㡣�������,���������˲�����X������500 s�����������н���ʹ���ǹ�۲�ֵ,���,�������Ȳ������롣
�� 4 ������ϵ���ϵͳ�ľ��ȶԱ� Table 4 Accuracy comparison of several integrated navigation systems
| ������ʽ | ��������/s | Ԥ�⾫�� | ��������/m |
| �ǹ��(ֱ�����е�ƽ) | 5 | 1 435 | |
| X���ߵ���(3����) | 500 | 167.67 | |
| �����˲���ϵ��� | 500 | 316.17 | |
| ����ѧ��������۲�ֵ | 5 | 1.00��10-6 | 297.51 |
| ����������۲�ֵ | 5 | 1.00��10-7 | 259.79 |
��ѡ��
���� 4�п��Կ���,ͨ����X���������dz����ڵ�������۹�������������۲�ֵ,���Դ����ߵ������ȡ�������ͨ�������緽������۲�ֵ���и��ߵĵ������ȣ�������Ϊ�����������Ԥ��������
5 �� �� �������������۲�ֵ��X���ߵ������ǹ���ϵ�������,ͨ�������о���������֤�õ���Ҫ��������:
1) ��X���������ǵij���������������۲�ֵ����ʵ�ֵ����������ǹ⼯��ʽ����˲��ĸ߾��ȵ����㷨,�������ȴﵽ259.79 m��
2) ��������������۲�ֵ�ķ������ڶ���ѧ��������۲�ֵ�ķ���,�۲�ֵ���ƾ��ȿ����һ��������,�ﵽ10-7������
3) ����۲�ֵ�����ڶԵ�������������Ӱ�졣��������۲�ֵ���ڼӳ�,����˲�ϵͳ�ĵ������������½���ͨ����������ڵĹ۲�ֵ,�ܹ���������̽���������ɵĵ�����
�����
| [1] | ����.X���������Ǹ߹������������������Ӧ�ü����о�[D].�Ͼ�:�Ͼ����պ����ѧ,2010:35-47. QIAO L.X-ray pulsar-based autonomous navigation and its application to high earth orbits satellites[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2010:35-47(in Chinese).(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [2] | SHEIKH S I, PINES D J, RAY P S, et al. Spacecraft navigation using X-ray pulsars[J]. Journal of Guidance,Control,and Dynamics,2006, 29(1): 50�C63. |
| Click to display the text | |
| [3] | ˧ƽ, ����, ������, ��. X���������ǵ���ϵͳԭ���뷽��[J]. ����:�й��������,2009: 23�C27.SHUAI P, LI M, CHEN S L, et al. Principle and method of X-ray pulsars navigation system[J]. Beijing:China Astronautic Publishing House,2009: 23�C27.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [4] | �, ���, ����, ��. ��ʱ��ʵʱ�۲������ǵĵ�̽������������[J]. �������պ����ѧѧ��,2014, 40(9): 1183�C1188.YANG B, ZHANG R, SUN H, et al. Navigation method using a single detector based on the observation of X-ray pulsar in different time interval[J]. Journal of Beijing University of Aeronautics and Astronautics,2014, 40(9): 1183�C1188.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [5] | EMADZADEH A A, SPEYER J L. X-ray pulsar-based navigation[M].Beijing: National Defence of Industry Press, 2013: 5-15. |
| Click to display the text | |
| [6] | ��͢��. X�������������嵽�ﺽ����ʱ�����[J]. �ռ��ѧѧ��,2008, 28(4): 330�C334.YANG T G. Spacecraft X-ray pulsar pulse time measurement[J]. Journal of Space Science,2008, 28(4): 330�C334.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [7] | ANDERSON K D,PINES D J.Experimental validation of pulse phase tracking for X-ray pulsar based spacecraft navigation:AIAA-2013-5202[R].Reston:AIAA,2013. |
| Click to display the text | |
| [8] | SHEIKH S I,HELLINGS R W,MATZNER R A.High-order pulsar timing for navigation[C]//Proceedings of the 63rd Annual Meeting of the Institute of Navigation.Fairfax,VA:ION,2007:432-443. |
| Click to display the text | |
| [9] | GOLSHAN A R,SHEIKH S I.On pulse phase estimation and tracking of variable celestial X-ray sources[C]//Proceedings of the 63rd Annual Meeting of the Institute of Navigation.Fairfax,VA:ION,2007:413-422. |
| Click to display the text | |
| [10] | ����, ���ɽ�, ���. ���춯��ѧ����[M].�Ͼ�: �Ͼ���ѧ������, 2006: 125-156.LIU L, HU S J, WANG X. Introduction of aerospace dynamics[M].Nanjing: Nanjing University Press, 2006: 125-156.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [11] | SUNEEL I S.The use of variable celestial X-ray sources for spacecraft navigation[D].Maryland:University of Maryland,2005:26-37. |
| Click to display the text | |
| [12] | JASON W M, MUNTHER A H,LUKE M B W,et al.SEXTANT-Station explorer for X-ray timing and navigation technology:AIAA-2015-0865[R].Reston:AIAA,2015. |
| Click to display the text | |
| [13] | ������, ������, ������. �������������ĵ���ԭ���뷽��[M].����: ������ҵ������, 2010: 77-80.FANG J C, NING X L, TIAN Y L. Principle and method of the spacecraft autonomous celestial navigation[M].Beijing: National Defence of Industry Press, 2010: 77-80.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [14] | ����, ����, �����. ����X���������ǺͶ�����Ƶ�Ƶ���ϵ���[J]. �ѧ��,2010, 31(6): 1552�C1556.LIU J, MA J, TIAN J W. Integrated X-ray and doppler shift navigation[J]. Journal of Astronautics,2010, 31(6): 1552�C1556.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [15] | ë��, ��С��, ����ƽ. X���������ǵ����ɼ��Է���[J]. �人��ѧѧ��,2009, 34(2): 222�C225.MAO Y, SONG X Y, FENG L P. Visibility analysis of X-ray pulsar navigation[J]. Journal of Wuhan University,2009, 34(2): 222�C225.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
| [16] | ���Ρ, �, ������, ��. �ִ���Ϣ�ںϼ�������ϵ����е�Ӧ��[M].����: ������ҵ������, 2010: 123-126.BIAN H W, LI A, QIN F J, et al. Modern information fusion technology in the application of the integrated navigation[M].Beijing: National Defence of Industry Press, 2010: 123-126.(in Chinese). |
| Cited By in Cnki (0) | Click to display the text | |
