
ʽ��:x��yΪ�ɻ����ĵ�����;��Ϊ�����(��תΪ��);��1����2Ϊ�����ֵ���ת�ǣ���Ϊǰ����ܵIJ�����������ǰ��������Ի����IJ���λ��.
 |
| ͼ 1 �ɻ�����ƽ���˶�����ͼFig. 1 Main view of aircraft taxiing planar motion |
| ͼѡ�� |
��ͼ 1��,hΪ�ɻ����ĵ��ܵ���ĸ߶�,rΪ���ӵİ뾶,L2��ʾ��������������ĵ��������ζԳ���ľ���.��ͼ 2��,L1Ϊǰ��������ĵ���������������ߵ�ƽ��ͶӰ����,xi,yi(i=1,2,3)Ϊ�������ĵ�����.
 |
| ͼ 2 �ɻ�����ƽ���˶�����ͼFig. 2 Top view of aircraft taxiing planar motion |
| ͼѡ�� |
1.3 ������Լ�����̷ɻ����ܵ��ϻ���ʱ�ܵ���Լ��Ϊ������Լ��.��ǰ���ʱ,ϵͳ��Լ������Ϊ
��������ʽΪ
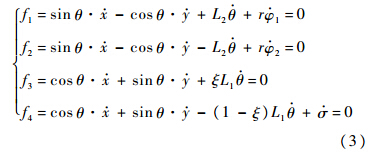
ʽ��:��Ϊ�ɻ���ֹ���ܵ���ʱ������ܳ��ذٷֱ�;Լ������f1��f2�ֱ�Ϊ������������������ܵ��ϴ�������f3Ϊ������ܵ����������᷽����ٶ�Ϊ��(���)��f4Ϊǰ�����������.��ǰ�ַ����ʱ,f4Լ����ϵ���ƻ�,ϵͳ��Լ��������ǰ3������.1.4 �ɻ�ǰ�ֵķǹ⻬Լ��������ǰ�����ܵ��ϴ�����(�)ʱ,������Լ������f4=0,��Լ�����̳������������ܵ������������ϵ�Ħ����С�����Ħ����.���������Ħ���������㹻��,��ʹ�ɻ��ڻ��ܹ�������ƫ.�жϷɻ�ǰ���Ƿ���Լ��������������ʽ����.��ǰ�������IJ����ľ�����Ħ��ϵ���ֱ�����0����1.�ɿ���Ħ�����ɿ�֪Ħ�����뷨��֧������Ӧ����:

ʽ��:Ff��FN�ֱ�Ϊǰ�ֵIJ���Ħ�����ͷ���֧����;vr��
 r�ֱ�Ϊǰ�����ܵ��Ӵ���IJ������ٶȺͼ��ٶ�;sgn()Ϊ���ź���;Sgn()Ϊ��ֵ�������䶨��ʽΪ
r�ֱ�Ϊǰ�����ܵ��Ӵ���IJ������ٶȺͼ��ٶ�;sgn()Ϊ���ź���;Sgn()Ϊ��ֵ�������䶨��ʽΪ
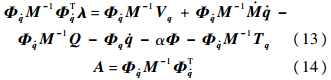
2 ����ѧ���̼���ֵ���㷽��2.1 ϵͳ�Ķ���ѧ���̾��ж���������Լ������ϵͳ�Ķ���ѧ���̿���Routh���̸���[11]��

ʽ��:L=T��VΪLagrange������T��V�ֱ�Ϊϵͳ���ܺ�����;��ΪLagrange����������;QΪ�������Ĺ�������������
 ΪԼ�����̹��ڹ����ٶȵ�Jacobi�����ת��,ϵͳ�Ķ��ܺ����ܿ���д�ɹ����ٶȺ�������Ķ����뺯��:
ΪԼ�����̹��ڹ����ٶȵ�Jacobi�����ת��,ϵͳ�Ķ��ܺ����ܿ���д�ɹ����ٶȺ�������Ķ����뺯��: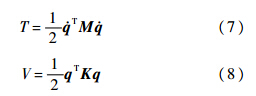
ʽ��:MΪϵͳ�Ĺ�����������;KΪ����նȾ���.��ʽ(6)�ɵ�

ʽ��:
 Ϊ�������������ʱ��ĵ���;Tq��Vq�ֱ�Ϊϵͳ�Ķ��ܺ��������ܺ����Թ�������������q��.Ϊ������ֵ����ʱ����Լ�����̵�Ư��,����Լ���ȶ���������
Ϊ�������������ʱ��ĵ���;Tq��Vq�ֱ�Ϊϵͳ�Ķ��ܺ��������ܺ����Թ�������������q��.Ϊ������ֵ����ʱ����Լ�����̵�Ư��,����Լ���ȶ���������
ʽ��:��ΪΥԼ����ϵ��,��ֵ������.������ʱ���ɵ�

ʽ��:��qΪ�����ڹ��������Jacobi����.��ʽ(11)����ʽ(10)�õ�

�ٽ�ʽ(9)����ʽ(12),�ɵ�
��

�ɴ˿ɵ�

ʽ��:A��bΪ��������ϵ������.�ٽ�ʽ(16)����ʽ(9),�ɵ�

Ӧ�ó��ַ��̵���ֵ���㷽�����ʽ(17),�ɴ˿ɵõ�ϵͳ��
 ��q,�ٽ������ʽ(16),�ɵõ���.2.2 ����������ɻ�����½����ʱ�ܵ���������,����ƫת�����λ�����ṩ�ϴ������������.��ʱ�ɻ���������������ϵ����ʽ����,��½״̬����ϵ��CL=1.5,����ϵ��CD=0.2[12].��������������ɻ����ļ�,��Ч��һ������һ����ż,�طɻ���������ϵ�ֽ�õ�ʽ(18)~ʽ(21)��ʽ�е�ϵ����ͨ��������̹�����[13].
��q,�ٽ������ʽ(16),�ɵõ���.2.2 ����������ɻ�����½����ʱ�ܵ���������,����ƫת�����λ�����ṩ�ϴ������������.��ʱ�ɻ���������������ϵ����ʽ����,��½״̬����ϵ��CL=1.5,����ϵ��CD=0.2[12].��������������ɻ����ļ�,��Ч��һ������һ����ż,�طɻ���������ϵ�ֽ�õ�ʽ(18)~ʽ(21)��ʽ�е�ϵ����ͨ��������̹�����[13].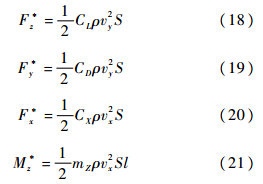
ʽ��:CX��mZ�ֱ�Ϊ����ϵ���ͺ������ϵ��;��Ϊ�����ܶ�;vy��vx�ֱ�Ϊ�����ٶ��طɻ�����Ͳ���ķ���;SΪ�ɻ���ЧͶӰ���;lΪ����չ��.2.3 ֧��������Ϊ�ж�ǰ���Ƿ����,��Ҫ�����ܵ������ӵ�֧����.��ʽ(17)�ɼ����
 ,�����õ�������,���ö�����,��������ܵ������ӵ�֧����[14]Ϊ
,�����õ�������,���ö�����,��������ܵ������ӵ�֧����[14]Ϊ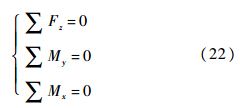
�������ʽΪ
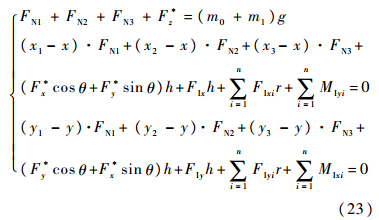
ʽ��:FIx��FIy�ֱ�Ϊ������������x�ᡢy�᷽�����;FNiΪ����֧������FIxi��FIyi�ֱ�Ϊ���ӹ�������x�ᡢy�᷽�����;MIxi��MIyi�ֱ�Ϊ���ӹ���������x�ᡢy�᷽�����;i=1,2,3.2.4 Ħ����������ʽ(16)�ɼ����Lagrange������(���ܵ������������ϵ�Լ����).����,��Ӧ��Լ������f1��f2��Lagrange������1����2�ֱ��ʾ���������������ƽ���ڹ��������Ħ����.��Ӧ��Լ������f3����3��ʾ������������ֲ���Ħ�����ĺ���.ǰ����ܵ����Ӳ������ʱ,��4��ʾǰ�ֵIJ���Ħ����.���������,Լ������f4���ƻ�,��Լ�������Ƿ��ƻ�(��ǰ���Ƿ����),��ʽ(4)�ж�.3 ��ֵ���������������ֱ���ɲ�����ز��ԳƺͲ�������Էɻ����ܶ���ѧ��Ϊ��Ӱ��.��ɻ�����m0=20 000 kg,��������m1=100 kg,���ֳ��ܷɻ��������صİٷֱ���=90%.�ɻ��Թ�������z���ת������J0=16��105 kg/m2[15],L1=6 m,L2=2.2 m,h=2 m,r=0.5 m,ǰ����ܺ�����εĵ���ϵ��k=2��105 N/m,������ϵ��c=104 N��s/m.�ɻ�3�����Ӿ��ӵغ�ij�ʼ�ٶ�Ϊ55 m/s,����Ϊ�ܵ�������.�������ܵ���ľ�����Ħ��ϵ���ֱ�Ϊ��0����1.3.1 ���ʱɲ�����ز��ԳƶԷɻ����ܵ�Ӱ����������������ֵ�ɲ��������һ��ʧ��.����,�����ɲ������Mf1=0 N��m,�Һ���ɲ������Mf2=r��0��1.1��104 N��m,�����ּ���ɲ�����ز��ԳƵ�����·����ɻ����ܵĶ���ѧ��Ϊ.ͼ 3~ͼ 5�ֱ������ɲ�����ز��Գ�ʱǰ�ֲ���Ļ����ٶȵ�ʱ������ͼ���ɻ����ĵ��˶��켣ͼ�ͷɻ����������ʱ������ͼ.
 |
| ͼ 3 ɲ�����ز��Գ�ʱǰ�ֲ������ٶȱ仯Fig. 3 Lateral slip speed change of front wheel when braking torque is asymmetric |
| ͼѡ�� |
��ͼ 4��ͼ 5��֪,��ɲ�����ز��Գ�ʱ,�ɻ��������ƫ����.��ͼ 3��֪,��Ħ��ϵ���ϴ�ʱ,�ɻ�����ƫ����С,��ǰ�������֮������;��Ħ��ϵ����Сʱ,��ƫ���ϴ���ǰ�ֻ���ֲ����.��Ħ��ϵ���ϴ�ʱ,ɲ������Ҳ�ϴ�,����ǰ�ֵĵ���֧�����ϴ�,�����Ħ��ϵ���ϴ�ʱǰ�ֻᷢ�������ķ����ҷɻ��Ļ��ܾ���Ҳ�϶�.
 |
| ͼ 4 ɲ�����ز��Գ�ʱ�ɻ������˶��켣Fig. 4 Motion trajectory of aircraft mass center when braking torque is asymmetric |
| ͼѡ�� |
 |
| ͼ 5 ɲ�����ز��Գ�ʱ�����ʱ������Fig. 5 Time history of heading angle when braking torque is asymmetric |
| ͼѡ�� |
��ͼ 3�����Կ���,ǰ�ֲ�������ڻ��ܵij���.�������ڸտ�ʼ����ʱ,�ɻ����ٶȽϴ�,�ܵ����������������ϴ�,����ǰ�ֵ�֧������С,���ŷɻ������ٶȵĽ���,����������������С,����ǰ�ֵķ���֧����������,����ڻ��ܵĺ���,ǰ�ֵIJ������ʧ.3.2 ɲ�����ضԳ�ʱ��������Էɻ����ܵ�Ӱ���������y���120��ʱ,����Ϊ20 m/s.ɲ������ΪMf1=Mf2=r��0��1.1��104 N��m.ͼ 6~ͼ 8�ֱ������ɲ�����ضԳ�ʱǰ�ֲ���Ļ����ٶȵ�ʱ������ͼ���ɻ����ĵ��˶��켣ͼ�ͷɻ�����ǵ�ʱ������ͼ.
 |
| ͼ 6 ɲ�����ضԳ�ʱǰ�ֲ������ٶȱ仯Fig. 6 Lateral slip speed change of the front wheel when braking torque is symmetric |
| ͼѡ�� |
��ͼ 6~ͼ 8��֪,��Ħ��ϵ���ϴ�ʱ,�ɻ�����ƫ����С,��ǰ�������֮������;��Ħ��ϵ����Сʱ,��ƫ���ϴ���ǰ������ƫ����ķ���,���ŷɻ��ٶ�����,��������Ҳ��С,ǰ�ֵ�֧����������,��������ʧ.
 |
| ͼ 7 ɲ�����ضԳ�ʱ�ɻ������˶��켣Fig. 7 Motion trajectory of the aircraft mass center when braking torque is symmetric |
| ͼѡ�� |
 |
| ͼ 8 ɲ�����ضԳ�ʱ�����ʱ������Fig. 8 Time history of the heading angle when braking torque is symmetric |
| ͼѡ�� |
ͼ 9����������������Ħ��ϵ���������,ɲ�����ت�Mf������ƫ��x�Ĺ�ϵ.��ͼ�п��Կ���,ɲ������ԽС,��ƫ��Խ��;��֮,ɲ������Խ��,��ƫ��ԽС.��ԭ���ǵ�ɲ�����ؽ�Сʱ,ǰ�ֵ�֧����Ҳ��С,�����,�һ��ܾ���ϳ�,��˵�����ƫ���ϴ�;��ɲ�����ؽϴ�ʱ,ǰ�ֵ�֧����Ҳ�ϴ�,�������,�һ��ܾ���϶�,�����ƫ����С.��ͼ 9��֪,Ӧ����Ħ��ϵ���Ĵ�С���ܵ��Ŀ����볤�ȡ����Ĵ�С��������ȷ��ɲ�����ص�ȡֵ��Χ.
 |
| ͼ 9 ɲ�����ضԳ�ʱɲ����������ƫ���Ĺ�ϵFig. 9 Relationship between Mf and x when braking torque is symmetric |
| ͼѡ�� |
3.3 ��Լ������Ư�Ƶ�����Ч������2��ʾϵͳԼ���������������Ķ�����.��ɲ�����ضԳ�ʱ����������ŵ�������,ȡu0=0.7��u1=0.5�����,ͼ 10������||��||2��ʱ������ͼ.��ͼ��֪,Լ���ȶ���������Ч��������Լ��Ư��.
 |
| ͼ 10 ɲ�����ضԳ�ʱ||��||2ʱ������Fig. 10 Time history of ||��||2 when braking torque is symmetric |
| ͼѡ�� |
4 �� ��1) �������ڲ��Գ�ɲ�����غͲ���غ������·ɻ����ܵ��ϻ��ܵ���ֵ����.����������,���Գ�ɲ�����غͲ���غɶ�������ɻ�������ƫ,��ƫ���벻�Գ�ɲ�����غͲ���غɵĴ�С�����.���ɻ��������Ħ��ϵ����Сʱ,��������ɻ�ǰ�ֵIJ,����·ɻ����ܳ��ֽϴ����ƫ��,����ǰ�ֲ�������ڻ��ܵij���.2) ����Լ���ȶ�������,��Ч�ر�������ֵ����ʱ����Լ�����̵�Ư��,��֤����ֵ����������ȷ��.��ֵ����������֤�˱��ĸ�����������Ч��.
�����
| [1] | Prashant D K. Simulation of asymmetric landing and typical ground maneuvers for large transport aircraft[J].Aerospace Science and Technology,2003,7(8):611-619. |
| Click to display the text | |
| [2] | ��Ƽ,����. �������½��̬����ģ�ͼ������Ż����[J].�Ͼ����պ����ѧѧ��,2003,35(5):498-502. Jing P,Nie H.Dynamic simulation model and parameter optimization for landing gear impact[J].Journal of Nanjing University of Aeronautics and Astronautics,2003,35(5):498-502(in Chinese). |
| Cited By in Cnki (96) | |
| [3] | κС��. �ɻ��������½����ѧ�������������о�[D].�Ͼ�:�Ͼ����պ����ѧ,2005. Wei X H.Dynamic analysis of aircraft landing impact and vibration attenuating techniques[D].Nanjing:Nanjing University of Aeronautics and Astronautics,2005(in Chinese). |
| Cited By in Cnki (24) | |
| [4] | �����. �������ۼ����ڴ�ʩ[M].����:������ҵ������,1984. Zhu D P.Shimmy theories and anti-shimmy measures[M].Beijing:National Defense Industry Press,1984(in Chinese). |
| [5] | �˺��. �ɻ��������еĶ���ѧģ��[J].����ѧ��,2001,22(2):163-167. Gu H B.Dynamic model of aircraft ground handling[J].Acta Aeronautica et Astronautica Sinica,2001,22(2):163-167(in Chinese). |
| Cited By in Cnki (72) | |
| [6] | ��ТӢ,�����. �ɻ�����ǰ��ת���˶�����ѧģ�ͼ���ֵ����[J].Ӧ����ѧѧ��,1997,14(4):46-50. Wang X Y,Zhu D P.Mathematical model and numerical simulation of aircraft's front wheel turning movement[J].Chinese Journal of Applied Mechanics,1997,14(4):46-50(in Chinese). |
| Cited By in Cnki (37) | |
| [7] | Etienne C,Bernd K,Mark L.Analysis of medium-speed runway exit maneuvers[J].Journal of Aircraft,2011,48(5):1553-1564. |
| Click to display the text | |
| [8] | Schiehlen W. Research trends in multi-body system dynamics[J].Multibody System Dynamics,2007,18(1):3-13. |
| Click to display the text | |
| [9] | ���պ��칤ҵ����ѧ����ίԱ��. �ɻ������ǿ�����ָ��[M].�ɶ�:�Ĵ���ѧ����������,1989:3-7. Aerospace Industry Science and Technology Commission.Aircraft landing gear strength design guide[M].Chengdu:Sichuan Science and Technology Press,1989:3-7(in Chinese). |
| [10] | �ܽ���,�ױ���. �ɻ�����[M].����:������ҵ������,2010:73-80. Cao J H,Bai B R.Aircraft construction[M].Beijing:National Defense Industry Press,2010:73-80(in Chinese). |
| [11] | ÷����. ������ϵͳ��ѧ����[M].����:������ҵѧԺ������,1985:80-100. Mei F X.Mechanical basis of non-holonomic system[M].Beijing:Beijing Institute of Technology Press,1985:80-100(in Chinese). |
| [12] | ��Ϊ��. �ɻ��������[M].����:������ҵ��ѧ������,2005:11-16. Li W J.Aircraft design[M].Xi'an:Northwestern Polytechnical University Press,2005:11-16(in Chinese). |
| [13] | ������,�ܶ���. �ɻ���������ѧ[M].����:������ҵ��ѧ������,1989:245-254. Fan L Q,Zhou D Y.Aircraft aerodynamics[M].Xi'an:Northwestern Polytechnical University Press,1989:245-254(in Chinese). |
| [14] | Plakhtienko N P,Shifrin B M.Transverse elastic-friction vibrations of a running aircraft[J].International Applied Mechanics,2001,37(5):692-699. |
| Click to display the text | |
| [15] | ����گ. �ɻ�ת�������������[J].�ɻ����,1997(1):13-20. Liu M Z.Rotational inertia of the aircraft and its estimate[J].Aircraft Design,1997(1):13-20(in Chinese). |
| Cited By in Cnki (5) |
