
 , 郭子泺1,2, 邓朝辉3, 龙斌4
, 郭子泺1,2, 邓朝辉3, 龙斌4 1. 中南大学 高性能复杂制造国家重点实验室, 湖南 长沙 410083;
2. 中南大学 机电工程学院, 湖南 长沙 410083;
3. 中铁第四勘察设计院集团有限公司, 湖北 武汉 430063;
4. 中国铁建重工集团股份有限公司, 湖南 长沙 410100
收稿日期:2020-07-07
基金项目:国家重点研发计划项目(2017YFB1302603);湖南省科技重大专项(2019GK1010);中南大学研究生创新基金资助项目(2020zzts491)。
作者简介:夏毅敏(1987-), 男, 江西永新人, 中南大学教授, 博士生导师。
摘要:以硬岩隧道掘进机(TBM)隧道围岩为研究对象, 应用三维激光扫描技术检测TBM隧道成型质量, 提出了基于三维激光扫描技术的TBM隧道成型质量自动检测方法.将车载云台和二维激光扫描仪组成的三维扫描装置安装在TBM主梁上, 车载云台带着二维扫描仪朝刀盘方向快速旋转90°, 通过旋转编码器将扫描仪的二维点云实时转换成隧道的三维点云, 对点云进行隧道轴线计算、滤波、截取等预处理, 通过截面提取与三次分段Hermite插值曲线拟合的方法计算围岩的剥落与塌方.提出了隧道成型质量参数并依据其判断隧道成型质量, 结合TBM隧道工程实例进行分析, 验证TBM隧道成型质量检测方法的可行性.采用本方法可实现在TBM施工过程中隧道成型质量同步进行检测, 形成数字化测量体系.
关键词:硬岩隧道掘进机(TBM)隧道三维扫描隧道成型质量Hermite插值
TBM Tunnel Shaping Quality Detection Method and Its Application Based on Point Cloud
XIA Yi-min1,2
, GUO Zi-luo1,2, DENG Chao-hui3, LONG Bin4 1. State Key Laboratory of High Performance Complex Manufacturing, Central South University, Changsha 410083, China;
2. College of Mechanical and Electrical Engineering, Central South University, Changsha 410083, China;
3. China Railway Siyuan Survey and Design Group Co., Ltd., Wuhan 430063, China;
4. China Railway Construction Heavy Industry Group Co., Ltd., Changsha 410100, China
Corresponding author: XIA Yi-min, professor, E-mail: xiaymj@csu.edu.cn.
Abstract: Taking the surrounding rock of TBM tunnel as a research object, the 3D laser scanning technology is used to detect the shaping quality of TBM tunnel. An automatic detection method of TBM tunnel shaping quality was proposed based on the 3D laser scanning technology. The 3D scanning device composed of a Pan-Tilt and a 2D laser scanner is installed on the main beam of the TBM. The Pan-Tilt can quickly rotates 90° towards the cutter head with the 2D laser scanner, and can convert the 2D point cloud acquired by the scanner into a 3D point cloud in real time, then the computer performs preprocessing, such as tunnel axis calculation, filtering and interception on the point cloud, and calculates the flaking and collapse of the surrounding rock using section extraction and piecewise cubic Hermite interpolating polynomial. Parameters of the tunnel shaping quality can be given, thus the tunnel shaping quality can be accessed. The feasibility of the TBM tunnel shaping quality detection method was verified through an engineering example. By adopting this method, the tunnel shaping quality can be detected simultaneously during the TBM construction process, and a digital measurement system can be formed.
Key words: tunnel boring machine(TBM) tunnel3D scanningtunnel shaping qualityHermite interpolation
硬岩隧道掘进机(tunnel boring machines, TBM)施工具有掘进速度快、施工安全性好、自动化程度高、成本费用低等优点, 因此在长埋深埋隧道中得到了广泛的应用[1-2].TBM隧道和爆破隧道都是在硬质岩石的工况下进行施工, 开挖后出现裸露的隧道围岩[3-4], 与爆破隧道相比, TBM隧道虽然在地质良好的情况下隧道截面会形成标准且完整的圆形, 但是在地质较差的情况下隧道围岩仍会出现剥落和塌方的现象[5-6].剥落和塌方影响隧道轮廓形貌, 是评判隧道成型质量的关键性指标, 若隧道出现剥落和塌方则成型质量较差.TBM挖掘过程的信息化、智能化是其发展趋势[7-8], 目前TBM施工中仅依靠人工目测隧道成型质量, 无法精确量化其剥落和塌方的大小, 而且无法将隧道形貌和成型质量直接记录在计算机中, 限制了大数据智能化施工.
随着三维激光扫描技术不断发展, 爆破施工中三维激光扫描技术逐渐替代传统的“单点式”测量方法(全站仪、断面仪等)检测隧道成型质量, Wang采用三维激光扫描技术获取隧道轮廓信息并检测其变形情况[9];Li等基于三维激光扫描提取隧道点云的方向、轨迹、间距、粗糙度和孔径, 利用所提取的非连续性参数计算岩体的RMR(rock mass rating)和GSI (geological strength index)[10];许度等对爆破隧道进行三维扫描来获取开挖隧道的轮廓变化, 并计算其破坏区域(塌方、岩爆)的破坏深度、体积和表面积[11];许磊等基于激光点云采用多边形相交算法统计超欠挖面积, 实现隧道超欠挖检测[12];李海波等利用三角网格法及NURBS算法构建隧道表面模型并采用布尔逻辑运算测量洞室开挖的超欠挖量[13].三维激光扫描多应用于爆破隧道的主要原因是爆破施工时作业车辆可以自由移动, 不会遮挡扫描设备获取围岩的点云数据, 扫描设备可以架设在地面的任意位置, 而且爆破时间间隔较长, 有较为充足的时间采集并处理点云数据.而TBM隧道虽然有着与爆破隧道相同的硬质岩石工况, 但由于整个TBM设备较为庞大, 而且掘进速度较快, 两环掘进之间停留的时间仅有5~10 min, 因此在TBM隧道施工领域中仍未有三维激光扫描技术的应用.
为解决隧道点云采集的问题, 针对TBM隧道施工的特点, 本文将车载云台和二维激光扫描仪组成的三维扫描装置安装在TBM主梁上表面, 此位置较低且主梁两边空旷,可以直接采集两侧的围岩点云.为解决检测速度的问题, 本文提出了一种基于三维激光扫描技术的TBM隧道成型质量自动检测方法, 对采集的点云进行隧道轴线计算、滤波、截取等预处理, 通过截面提取与三次分段Hermite插值曲线拟合的方法计算围岩的剥落与塌方, 提出了隧道成型质量参数并依据其判断隧道成型质量, 结合TBM隧道工程实例进行分析, 验证TBM隧道成型质量检测方法的可行性.采用激光扫描进行隧道成型质量检测可以代替人工肉眼观察隧道轮廓, 实现隧道缺陷的精确量化和隧道形貌的自动存储, 大大提高了TBM的自动化程度.
1 现场数据采集与预处理本文研究了基于三维扫描的TBM隧道围岩检测系统, 在TBM施工过程中实现隧道成型质量检测, 采用激光扫描仪作为主要的测量设备, 用于获取隧道围岩的几何参数.
1.1 TBM隧道围岩检测系统的组成与精度验证1.1.1 TBM隧道围岩检测系统的组成本文研究的TBM隧道围岩检测系统主要由工控机和三维扫描装置组成, 工控机主要用于数据处理与存储, 三维扫描装置用于获取隧道点云数据.现有的三维扫描系统具有扫描速度快、体积小等特点, 但是其抗震性能差, 在长时间的震动环境下会损坏传动零部件, 使其无法正常工作.本文采用的三维扫描装置和计算机都是商业化设备, 由SICK公司的LMS511二维激光扫描仪和定制的车载云台组成, 所使用的计算机配置为Intel Core 2.60 GHz CPU, 内存为8 GB.其中二维扫描仪具有较高的抗震性能, 防护等级达到IP67, 实现防护灰尘吸入, 防护短暂浸泡, 扫描角度达到190°, 角度分辨率达到0.5°以下;车载云台按照最高防震等级定制, 保证其传动零部件的可靠性.点云采集软件是自主开发.为了实时检测TBM隧道的成型质量, 在围岩刚裸露时采集隧道点云数据, 将三维扫描装置安装在TBM主梁上.三维扫描装置主要由二维激光扫描仪和车载云台组成, 其底座焊接在TBM主梁上, 通过螺栓将车载云台固定在底座上, 如图 1所示.
图 1(Fig. 1)
 | 图 1 三维扫描装置及安装Fig.1 3D scanning device and the installation |
1.1.2 精度验证搭建三维扫描装置后需计算其精度, 选择3个反光片作为观察目标, 分别使用三维扫描装置和索佳IX1001全站仪测量其中点并计算各中点之间的距离, 以全站仪的结果为基准, 验证三维扫描装置的精度.三维扫描装置的精度验证实验如图 2所示, 图中A, B, C为3个反光片的位置.
图 2(Fig. 2)
 | 图 2 精度验证实验Fig.2 Accuracy verification experiment (a)—精度验证实验;(b)—反光片位置. |
三维扫描装置的均方误差计算公式为
 | (1) |
在TBM隧道施工中, 对于成型质量检测的精度要求是厘米级以下, 由表 1和式(1)可知, 三维扫描装置的均方误差为1.5 mm, 其精度满足检测隧道成型质量的要求, 可用于TBM隧道成型质量检测.
表 1(Table 1)
| 表 1 各点距离计算值 Table 1 Calculated distance between the points? | ||||||||||||||||||||||||||||||||||||||||||||||
1.2 TBM隧道围岩检测流程TBM隧道围岩检测工作流程如图 3所示.
图 3(Fig. 3)
 | 图 3 TBM隧道围岩检测工作的流程Fig.3 Flow chart of the monitoring process on surrounding rock of TBM tunnel |
三维扫描装置在隧道开挖前固定安装在TBM主梁上, 使用全站仪对三维扫描装置进行定位, 确定设备在TBM上的相对位置.由于扫描坐标系的原点处于设备内部, 无法直接进行定位, 因此在三维扫描装置安装在底座前使用全站仪和棱镜定位底座上连接车载云台的4个螺栓孔, 经坐标转换计算扫描坐标系原点在TBM的相对位置.
TBM掘进前进的过程中主梁一直处于振动状态[14], 因此三维扫描装置在换步的过程中采集隧道围岩点云数据, 此时TBM相对平稳.三维扫描装置采集点云数据后将其传输到工控机上进行预处理并存储, 通过算法计算隧道围岩中存在的剥落与塌方等缺陷, 指导后续隧道支护工作.
1.3 现场点云数据采集数据采集是通过二维扫描仪和车载云台的协同作用采集隧道围岩的点云数据, 二维扫描仪的扫描截面与车载云台的转轴重合, 车载云台带着二维扫描仪朝刀盘方向快速旋转90°.二维激光扫描仪基于时间飞行的基本测量原理, 对检测围岩进行非接触式测量, 通过发送与接收激光脉冲的时间差计算出其轮廓.车载云台内部的转轴上有一个旋转编码器, 当车载云台带动二维激光扫描仪运动时, 通过数据线实时地将其旋转角度输入到扫描仪中, 二维扫描仪实时输出各个点相对于扫描装置的位置参数, 如图 4所示.
图 4(Fig. 4)
 | 图 4 三维点云转换原理图Fig.4 Schematic map of the 3D point cloud conversion (a)—侧面;(b)—正面. |
根据扫描仪输出的报文信息转换各点的三维坐标(x, y, z):
 | (2) |
在数据采集前可调节二维扫描仪的扫描角度分辨率和车载云台的旋转速度, 本文使用的车载云台的旋转速度可调节范围为(0.01°~15°)/s, 二维扫描仪可选择的角分辨率为0.25°, 0.5°, 1°.当隧道围岩距离扫描装置较远时点云数据变稀疏, 可选择将角度分辨率调高并将旋转速度调慢以使点云更密集, 提高检测精度.
1.4 点云数据预处理三维扫描装置采集的隧道点云含有TBM设备上的点云(无关点)与一定量的噪声点(离群点), 在截取隧道截面点云时, 若截面中存在无关点和离群点, 拟合的隧道轮廓与真实的隧道轮廓将有很大的偏差, 会严重影响隧道塌方量的计算精度, 因此在计算隧道缺陷前需对采集的隧道围岩点云数据进行预处理.
扫描装置安装在TBM上, 而且在隧道开挖前已经对其定位, 因此根据导向系统可计算出所采集点云数据中的隧道中轴线, 根据隧道中轴线对隧道点云数据进行滤波、截取等预处理.
滤波是去除点云数据中的无关点和噪声点(离群点), 对于无关点采用基于距离阈值点云去噪方法去除[15], 点云与中轴线距离小于0.9R0则去除点云.对于噪声点(离群点)采用低频随机噪声点过滤方法去除[16].
TBM每前进一环都会采集一次点云数据, 而每一次采集的点云数据都比TBM沿轴线方向前进的距离长, 因此将点云数据截取成TBM这一环沿轴线方向前进的长度, 每一次检测隧道成型质量的长度就是TBM这一环所前进的长度.
2 隧道围岩缺陷检测方法TBM隧道成型质量检测主要计算隧道的围岩剥落与塌方量, 并检测其所在隧道的位置, 方便施工人员进行下一步的支护作业.在施工现场检测隧道成型质量精度要求在厘米级, 因此本三维扫描装置完全满足其精度要求.本文研究的TBM隧道围岩检测系统主要基于隧道截面检测隧道开挖后出现的围岩剥落与塌方现象, 将一段隧道点云分割成许多个截面, 在计算每个截面的隧道围岩情况后判断这一段隧道围岩的情况.
2.1 隧道截面提取根据中轴线提取隧道截面点云数据, 在需要提取隧道截面的隧道中心处, 计算中轴线的方向向量, 该方向向量即为隧道截面的法向量, 提取属于隧道截面内的点:
 | (3) |
图 5(Fig. 5)
 | 图 5 隧道点云排序Fig.5 Tunnel point cloud sorting |
2.2 隧道截面曲线拟合由于拟合曲线必须经过截面内的各点, 因此使用插值法来拟合隧道截面曲线.拉格朗日插值法和牛顿插值法没有考虑导数相同, 无法模拟出被插值的函数形态;而样条曲线在两边有轻微震荡现象, 与现实隧道轮廓有一定的差距, 因此使用三次分段Hermite插值法能最好地拟合隧道截面曲线.
运用三次分段Hermite插值函数[17]对排序后的截面点云进行隧道轮廓拟合,插值函数f(x)在每一个小区间[xj, xj+1]内表现为以下形式:
 | (4) |
 | (5) |
对于完成排序后的非两端点的点云:
1) 若第j个节点附近的差商δj-1=

2) 若第j个节点附近的差商δj-1=

根据点的间隔长度设置差商δj-1和δj权重为
 | (6) |
 | (7) |
 | (8) |
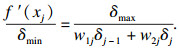
因为计算每个点处的一阶导数仅需两个δ, 因此δmaxδmin=δj-1δj, 对式(8)化简后可得
 | (9) |
 | (10) |
 | (11) |
 | (12) |
2.3 隧道剥落与塌方检测在TBM开挖后, 隧道围岩可能会出现剥落、坍塌等现象, 因此需要检测围岩剥落区域位置及剥落大小.因为TBM开挖有完整的圆形, 若出现剥落、坍塌等现象, 该区域的点云数据会出现实际半径大于理论半径的情况, 因此将隧道理论半径的长度作为阈值, 计算隧道截面拟合曲线上超过阈值的部分, 该区域即为隧道剥落或塌方的区域.
 | (13) |
在同一隧道截面中隧道剥落与坍塌的位置可能有多处, 标记每一处的隧道剥落或塌方区域f1(x), f2(x), f3(x)…, 对比前后两个隧道截面的剥落或塌方区域, 将相同区域的归为同一剥落或塌方区域.
2.4 隧道塌方量计算对隧道塌方量的计算主要是计算隧道实际轮廓与理论轮廓的差值, 通过累加每个截面的塌方量计算隧道总体的或某一片区域的塌方量.计算隧道截面的塌方量主要围绕2.3节中检测出来的隧道剥落或塌方区域f1(x), f2(x), f3(x), 本文计算隧道塌方量使用积分的方法:
 | (14) |

将所有截面的塌方面积乘以相邻截面间的距离再进行累加可得到隧道总体的塌方量:
 | (15) |
2.5 隧道成型质量检测若隧道出现剥落或塌方的情况, 则隧道成型质量较差, 需要进行后续的支护.运用数学统计的方法区分隧道成型质量良好和隧道有缺陷的情况, 在隧道轮廓拟合曲线上均匀取点, 计算这些点与隧道理论轮廓距离的均方根, 将均方根设为隧道成型质量参数, 根据隧道成型质量参数判断隧道围岩是否存在缺陷.
 | (16) |
3 隧道成型质量检测方法应用在新疆某TBM工地上安装设备进行围岩点云数据采集和隧道围岩检测, 其TBM刀盘直径为7 030 mm.设置车载云台的旋转速度为18(°)/s, 二维扫描仪的角度分辨率为0.5°, 一次采集点云时间为5.0 s, 采集122 301个数据点, 在每次TBM换步时采集隧道点云数据并进行预处理, 处理后仅有86 594个隧道围岩数据点, 如图 6所示.
图 6(Fig. 6)
 | 图 6 隧道点云滤波处理Fig.6 Tunnel point cloud filtering processing (a)—隧道原始点云数据;(b)—截取并滤波的点云数据. |
固定在TBM上的三维扫描装置可获取的点云约占隧道整体圆的三分之一, 其截面圆心角为115°.以TBM掘进一环的长度截取两段隧道点云, 一段是有剥落的隧道围岩, 另一段是完整的隧道围岩, 如图 7所示, 沿其中轴线方向每5.0 mm截取一个截面, 其每个截面约有200多个数据点, 能够充分反映隧道围岩的细节且数据处理速度较快, 将每个截面都投影到xoy面中, 将点云数据中钢筋网的点云去除后采用Hermite插值函数对截面中的点云进行隧道截面轮廓拟合, 其拟合效果如图 8所示.
图 7(Fig. 7)
 | 图 7 TBM隧道围岩图像Fig.7 Image of TBM tunnel (a)—有剥落的隧道围岩;(b)—完整的隧道围岩. |
图 8(Fig. 8)
 | 图 8 隧道截面轮廓拟合曲线Fig.8 Fitting curve of tunnel section profile (a)—有剥落的整体轮廓拟合;(b)—围岩完整的整体轮廓拟合. |
将两个截面拟合曲线与隧道理论轮廓曲线相减, 并将其差值绘制成曲线图, 如图 9所示, 图中出现负值是因为在TBM开挖后有少许泥土或石渣粘附在部分围岩上.
图 9(Fig. 9)
 | 图 9 拟合曲线与理论曲线的差值曲线图Fig.9 The difference curve of the fitting curve and the theoretical curve (a)—有剥落的隧道围岩;(b)—完整的隧道围岩. |
由图中可以看出, 由于TBM开挖后隧道围岩表面并不光滑, 会呈现出凹凸不平的情况, 拟合曲线与理论轮廓曲线的差值出现上下波动的现象, 而隧道成型质量良好的围岩其差值的波动幅值在15.0 mm以下, 因此取15.0 mm为判断隧道成型质量好坏的临界值.在两条拟合曲线上分别均匀密集取点, 计算有剥落和完整的隧道围岩两个截面的隧道成型质量参数分别为27.8和6.3 mm.有剥落的隧道截面隧道成型质量参数大于临界值, 因此其隧道成型质量较差;完整的隧道截面成型质量参数小于临界值, 因此其隧道成型质量较好.图 9a中隧道围岩剥落位置处在横坐标1 100~ 1 900 mm, 其剥落距离理论轮廓的最大距离为99.0 mm, 单独计算此处剥落的横截面积为45 048.0 mm2.将每个截面剥落处的横截面积与相邻截面间隔距离相乘后累加, 计算出这一段隧道围岩的剥落量为0.005 9 m3, 其计算值与人工测量实际掉落石块量相符, 满足TBM隧道成型质量检测要求.其检测用时3.0 s, 加上点云采集用时5.0 s, 总体检测速度快, 自动化程度高, 适用于TBM施工作业.
4 结论1) 将三维扫描装置安装在TBM上, 实现了在TBM施工过程中获取围岩点云信息以及点云滤波、截取等预处理过程.
2) 通过截面提取与轮廓曲线拟合的方法计算围岩的剥落与塌方, 提出了隧道成型质量参数并有效地应用到实际工程施工中, 实现了在TBM施工中自动检测隧道成型质量.
3) 与传统的人工测量法相比, 该方法具有点云采集和检测耗时短、自动化程度高、适用于TBM施工作业等特点, 检测数据可采用数据库存储, 有利于形成数字化测量体系.
参考文献
| [1] | Liu Q S, Huang X, Gong Q M, et al. Application and development of hard rock TBM and its prospect in China[J]. Tunnelling and Underground Space Technology, 2016, 57: 33-46. DOI:10.1016/j.tust.2016.01.034 |
| [2] | 《中国公路学报》编辑部. 中国隧道工程学术研究综述·2015[J]. 中国公路学报, 2015, 28(5): 1-65. (Editorial Department of China Journal of Highway and Transport. Review on China's tunnel engineering research: 2015[J]. China Journal of Highway and Transport, 2015, 28(5): 1-65. DOI:10.3969/j.issn.1001-7372.2015.05.001) |
| [3] | Zheng Y L, Zhang Q B, Zhao J. Challenges and opportunities of using tunnel boring machines in mining[J]. Tunnelling and Underground Space Technology, 2016, 57: 287-299. DOI:10.1016/j.tust.2016.01.023 |
| [4] | Ozcelik M. Criteria for the selection of construction method at the Ovit mountain tunnel (Turkey)[J]. KSCE Journal of Civil Engineering, 2016, 20(4): 1323-1328. DOI:10.1007/s12205-015-0055-3 |
| [5] | Naji A M, Emad M Z, Rehman H, et al. Geological and geomechanical heterogeneity in deep hydropower tunnels: a rock burst failure case study[J]. Tunnelling and Underground Space Technology, 2019, 84: 507-521. DOI:10.1016/j.tust.2018.11.009 |
| [6] | Xie L T, Yan P, Lu W B, et al. Effects of strain energy adjustment: a case study of rock failure modes during deep tunnel excavation with different methods[J]. KSCE Journal of Civil Engineering, 2018, 22(10): 4143-4154. DOI:10.1007/s12205-018-0424-9 |
| [7] | Li J B, Jing L J, Zheng X F, et al. Application and outlook of information and intelligence technology for safe and efficient TBM construction[J]. Tunnelling and Underground Space Technology, 2019, 93: 103097. DOI:10.1016/j.tust.2019.103097 |
| [8] | Deng M J. Challenges and thoughts on risk management and control for the group construction of a super-long tunnel by TBM[J]. Engineering, 2018, 4(1): 112-122. DOI:10.1016/j.eng.2017.07.001 |
| [9] | Wang X D. Application of long distance microscope and three-dimensional laser scanner in tunnel section detection[J]. Acta Microscopica, 2019, 28(5): 1099-1107. |
| [10] | Li X J, Chen Z Y, Chen J Q, et al. Automatic characterization of rock mass discontinuities using 3D point clouds[J]. Engineering Geology, 2019, 259: 105131. DOI:10.1016/j.enggeo.2019.05.008 |
| [11] | 许度, 冯夏庭, 李邵军, 等. 基于三维激光扫描的锦屏地下实验室岩体变形破坏特征关键信息提取技术研究[J]. 岩土力学, 2017, 38: 38. (Xu Du, Feng Xia-ting, Li Shao-jun. Research on key information extraction of rock mass deformation and failure characteristics in Jinping underground laboratory based on 3D laser scanning technique[J]. Rock and Soil Mechanics, 2017, 38(sup1): 488-495.) |
| [12] | 许磊, 王长进. 基于激光点云的隧道超欠挖检测方法研究[J]. 铁道工程学报, 2016, 33(12): 77-81. (Xu Lei, Wang Chang-jin. Research on the detection method of tunnel under-over break using point cloud[J]. Journal of Railway Engineering Society, 2016, 33(12): 77-81. DOI:10.3969/j.issn.1006-2106.2016.12.017) |
| [13] | 李海波, 杨兴国, 赵伟, 等. 基于三维激光扫描的隧道开挖衬砌质量检测技术及其工程应用[J]. 岩石力学与工程学报, 2017, 36: 36. (Li Hai-bo, Yang Xing-guo, Zhao Wei, et al. Measurement technology and its application for tunnel excavation and lining quality based on 3D laser scanning[J]. Chinese Journal of Rock Mechanics and Engineering, 2017, 36(sup1): 34556-3463.) |
| [14] | Yang Y H, Chen G, Liu X Z, et al. Sensitivity analysis of an open TBM gripping-thrusting-regripping mechanism based on the natural characteristics[J]. Mechanism and Machine Theory, 2019, 139: 1-20. DOI:10.1016/j.mechmachtheory.2019.04.006 |
| [15] | Xie X Y, Lu X Z. Development of a 3D modeling algorithm for tunnel deformation monitoring based on terrestrial laser scanning[J]. Underground Space, 2017, 2(1): 16-29. DOI:10.1016/j.undsp.2017.02.001 |
| [16] | 秦亚光, 罗周全, 汪伟, 等. 采空区三维激光扫描点云数据处理技术[J]. 东北大学学报(自然科学版), 2016, 37(11): 1635-1639. (Qin Ya-guang, Luo Zhou-quan, Wang Wei, et al. Cavity three-dimensional laser scanning point cloud data processing technology[J]. Journal of Northeastern University (Natural Science), 2016, 37(11): 1635-1639.) |
| [17] | Rabbath C A, Corriveau D. A comparison of piecewise cubic hermite interpolating polynomials, cubic splines and piecewise linear functions for the approximation of projectile aerodynamics[J]. Defence Technology, 2019, 15(5): 741-757. DOI:10.1016/j.dt.2019.07.016 |
