| 平面柔性铰链机构的柔度计算方法 |
| 杜云松, 李铁民, 姜峣, 张京雷 |
| 清华大学 机械工程系, 北京 100084 |
| Compliance calculation method for planar flexure-based mechanisms |
| DU Yunsong, LI Tiemin, JIANG Yao, ZHANG Jinglei |
| Department of Mechanical Engineering, Tsinghua University, Beijing 100084, China |
摘要:
| |||
| 摘要作为一种高精度的微动机构, 柔性铰链机构已经在多个工业领域得到应用。该文针对平面柔性铰链机构, 对机构设计中柔度计算方法进行了研究。在分析了一般柔性铰链的柔度计算方法的基础上, 利用虚功原理, 推导出单个铰链的变形/受力相较于整个机构的变形/受力的关系; 利用矩阵分析方法, 结合串联机构和并联机构的单元与终端的变形/受力的互逆形式的传递规律, 分别获得了简洁的串并联柔性铰链机构的柔度计算公式。针对3种典型的串并联柔性铰链机构, 进行了柔度计算和不同机构参数与各方向柔度关系的分析, 并利用经典的有限元法进行了对比仿真实验。实验结果表明: 该方法的计算结果与有限元法最大相差7%, 平均相差3%。这表明该方法能够为平面柔性铰链机构的设计和结构优化提供参考。 | |||
| 关键词 :柔性铰链机构,柔度,矩阵分析法 | |||
| Abstract:Flexure-based mechanisms are widely used in industry as highly precise micro-motion mechanisms. This paper presents a compliance calculation method for planar flexure-based mechanisms. The compliance of flexure hinges is used to relate the deformations to the loads on flexure member with the end-effector motion obtained using the virtual work principle. Then, a matrix method is used to derive concise compliance equations for serial and parallel flexure mechanisms. The compliance and the relationship between the compliance terms and variable geometric parameters are analyzed for three typical flexure-based mechanisms. The model results compare well with finite element method (FEM) predictions with a maximum difference of 7% and an average difference of 3%. This method provides theoretical and technical support for the design and optimization of flexure-based mechanisms. | |||
| Key words:flexure-based mechanismscompliancematrix method | |||
| 收稿日期: 2015-07-02 出版日期: 2016-07-01 | |||
| |||
| 通讯作者:李铁民, 副研究员, E-mail: litm@mail.tsinghua.edu.cnE-mail: litm@mail.tsinghua.edu.cn | |||
| 引用本文: |
| 杜云松, 李铁民, 姜峣, 张京雷. 平面柔性铰链机构的柔度计算方法[J]. 清华大学学报(自然科学版), 2016, 56(6): 633-639. DU Yunsong, LI Tiemin, JIANG Yao, ZHANG Jinglei. Compliance calculation method for planar flexure-based mechanisms. Journal of Tsinghua University(Science and Technology), 2016, 56(6): 633-639. |
| 链接本文: |
| http://jst.tsinghuajournals.com/CN/10.16511/j.cnki.qhdxxb.2016.22.024或 http://jst.tsinghuajournals.com/CN/Y2016/V56/I6/633 |
图表:
 |
| 图1 圆弧型柔性铰链结构示意图 |
 |
| 图2 圆弧型柔性铰链单元受载示意图 |
 |
| 图3 平面串联柔性铰链机构 |
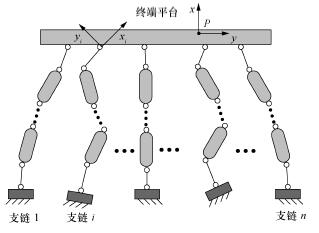 |
| 图4 平面并联柔性铰链机构 |
 |
| 图5 平面串联柔性铰链机构 |
 |
| 表1 两作用点位置重合时串联柔性铰链机构误差 |
 |
| 表2 两作用点位置不同时串联柔性铰链机构误差 |
 |
| 图6 平面并联柔性铰链机构常用结构形式 |
 |
| 图7 平行四边形柔性铰链机构 |
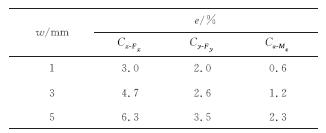 |
| 表3 平行四边形柔性铰链机构误差 |
 |
| 图8 双平行四边形柔性铰链机构 |
 |
| 图9 本文方法计算值与参数P/R 的关系 |
 |
| 图10 本文方法计算值与参数(L-2R)/R 的关系 |
 |
| 图11 本文方法计算值与参数(M-2R)/R 的关系 |
 |
| 图12 各向柔度误差与参数P/R、(L-2R)/R、 (M-2R)/R 的关系 |
参考文献:
| [1] Lobontiu N. Compliant Mechanisms: Design of Flexure Hinges [M]. Boca Raton, FL: CRC Press, 2010. [2] Yao Q, Dong J, Ferreira P M. Design, analysis, fabrication and testing of a parallel-kinematic micropositioning XY stage [J]. International Journal of Machine Tools and Manufacture, 2007, 47(6): 946-961. [3] Zubir M N M, Shirinzadeh B, Tian Y. Development of a novel flexure-based microgripper for high precision micro-object manipulation [J]. Sensors and Actuators A: Physical, 2009, 150(2): 257-266. [4] 贠远, 徐青松, 李杨民. 并联微操作机器人技术及应用进展 [J]. 机械工程学报, 2009, 44(12): 12-23.YUN Yuan, XU Qingsong, LI Yangmin, et al. Survey on parallel manipulators with micro/nano manipulation technology and applications [J]. Journal of Mechanical Engineering, 2009, 44(12): 12-23. (in Chinese) [5] 于靖军, 裴旭, 毕树生, 等. 柔性铰链机构设计方法的研究进展 [J]. 机械工程学报, 2010, 46(13): 2-13.YU Jingjun, PEI Xu, BI Shusheng, et al. State-of-arts of design method for flexure mechanisms [J]. Journal of Mechanical Engineering, 2010, 46(13): 2-13. (in Chinese) [6] Li Y, Xu Q. A novel piezoactuated XY stage with parallel, decoupled, and stacked flexure structure for micro-/ nanopositioning [J]. IEEE Transactions on Industrial Electronics, 2011, 58(8): 3601-3615. [7] Xiao S, Li Y. Development of a large working range flexure-based 3-DOF micro-parallel manipulator driven by electromagnetic actuators [J]. International Journal of Precision Engineering and Manufacturing, 2014, 15(4): 735-744. [8] Pei X, Yu J, Zong G, et al. An effective pseudo-rigid-body method for beam-based compliant mechanisms [J]. Precision Engineering, 2010, 34(3): 634-639. [9] Li Y, Xu Q. Design and analysis of a totally decoupled flexure-based XY parallel micromanipulator [J]. IEEE Transactions on Robotics, 2009, 25(3): 645-657. [10] Lobontiu N, Paine J S N, Garcia E, et al. Design of symmetric conic-section flexure hinges based on closed-form compliance equations [J]. Mechanism and Machine Theory, 2002, 37(5): 477-498. [11] Lobontiu N, Paine J S N, Garcia E, et al. Corner-filleted flexure hinges [J]. Journal of Mechanical Design, 2001, 123(3): 346-352. [12] Pham H H, Chen I M. Stiffness modeling of flexure parallel mechanism [J]. Precision Engineering, 2005, 29(4): 467-478. [13] Qin Y, Tian Y, Zhang D. Design and dynamic modeling of a 2-DOF decoupled flexure-based mechanism [J]. Chinese Journal of Mechanical Engineering, 2012, 25(4): 688-696. [14] Lobontiu N. Compliance-based matrix method for modeling the quasi-static response of planar serial flexure-hinge mechanisms [J]. Precision Engineering, 2014, 38(3): 639-650. [15] Qin Y, Shirinzadeh B, Zhang D, et al. Compliance modeling and analysis of statically indeterminate symmetric flexure structures [J]. Precision Engineering, 2013, 37(2): 415-424. [16] Jia X, Liu J, Tian Y, et al. Stiffness analysis of a compliant precision positioning stage [J]. Robotica, 2012, 30(6): 925-939. |
相关文章:
| ||
