| 基于最优计算量分配的公路轨迹规划 |
| 付骁鑫1, 江永亨1, 黄德先1, 王京春1, 黄开胜2 |
| 1. 清华大学自动化系, 北京 100084; 2. 清华大学汽车工程系, 北京 100084 |
| On-road trajectory planning based on optimal computing budget allocation |
| FU Xiaoxin1, JIANG Yongheng1, HUANG Dexian1, WANG Jingchun1, HUANG Kaisheng2 |
| 1. Department of Automation, Tsinghua University, Beijing 100084, China; 2. Department of Automotive Engineering, Tsinghua University, Beijing 100084, China |
摘要:
| |||
| 摘要针对智能汽车的公路轨迹规划问题, 本文将最优计算量分配(OCBA)的思想引入基于候选轨迹曲线的规划算法OODE, 提出新算法OCBA_OODE。OODE通过比较各候选曲线的"粗糙"(存在偏差但计算量小)评价确定最优轨迹曲线。曲线评价随着投入计算量的增加逐渐收敛至准确值, OODE对各曲线平均分配计算量, OCBA_OODE基于曲线评价循环分配计算量进而提高算法效率。OCBA_OODE在求解质量不下降的前提下, 规划速度比OODE的快20%。 | |||
| 关键词 :最优计算量分配,轨迹规划,智能汽车,序优化 | |||
| Abstract:This paper presents an algorithm named OCBA_OODE for on-road trajectory planning by using optimal computing budget allocation (OCBA) in a candidate-curve-based planning algorithm named OODE. OODE picks the best trajectory by comparing rough (biased but computationally inexpensive) evaluations of a set of candidate curves. The curve evaluation converges to the real value as the computing budget increases. OODE allocates the equal parts of the computing budget to each curve, while OCBA_OODE repeatedly allocates the budget according to the latest curve evaluations to improve the planning efficiency. OCBA_OODE is 20% faster than OODE while maintaining the same solution quality. | |||
| Key words:optimal computing budget allocationtrajectory planningintelligent vehiclesordinal optimization | |||
| 收稿日期: 2015-09-22 出版日期: 2016-04-01 | |||
| |||
| 通讯作者:江永亨,副教授,E-mail:jiangyh@tsinghua.edu.cnE-mail: jiangyh@tsinghua.edu.cn | |||
| 引用本文: |
| 付骁鑫, 江永亨, 黄德先, 王京春, 黄开胜. 基于最优计算量分配的公路轨迹规划[J]. 清华大学学报(自然科学版), 2016, 56(3): 273-280. FU Xiaoxin, JIANG Yongheng, HUANG Dexian, WANG Jingchun, HUANG Kaisheng. On-road trajectory planning based on optimal computing budget allocation. Journal of Tsinghua University(Science and Technology), 2016, 56(3): 273-280. |
| 链接本文: |
| http://jst.tsinghuajournals.com/CN/10.16511/j.cnki.qhdxxb.2016.21.024或 http://jst.tsinghuajournals.com/CN/Y2016/V56/I3/273 |
图表:
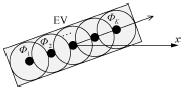 |
| 图1 车身表示 |
 |
| 表1 路线代价和行驶代价的计算 |
 |
| 图2 OODE算法的工作框架 |
 |
| 表2 TRP在不同1和ξ 下的统计结果 |
 |
| 图3 基于OCBA 确定“最优”轨迹曲线 |
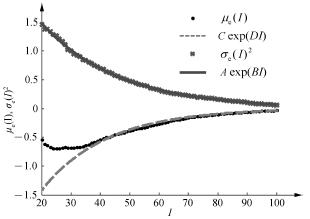 |
| 图4 μe(I)和σe(I)2 与I 的关系 |
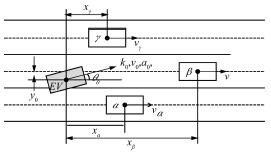 |
| 图55 一种典型交通场景 |
 |
| 表3 交通场景S1、S2、S3、S44和SR 的场景参数 |
 |
| 图6 OODE和OCBA_OODE的TRP |
 |
| 表4 DE、OODE和OCBA_OODE的算法性能比较 |
参考文献:
| [1] Karaman S, Frazzoli E. Sampling-based algorithms for optimal motion planning[J]. The International Journal of Robotics Research, 2011, 30(7):846-894. [2] Gehrig S K, Stein F J. Collision avoidance for vehicle-following systems[J]. Intelligent Transportation Systems, IEEE Transactions on, 2007, 8(2):233-244. [3] Brandt T, Sattel T, Wallaschek J. Towards vehicle trajectory planning for collision avoidance based on elastic bands[J]. International Journal of Vehicle Autonomous Systems, 2007, 5(1-2):28-46. [4] McNaughton M, Urmson C, Dolan J M, et al. Motion planning for autonomous driving with a conformal spatiotemporal lattice[C]//Robotics and Automation (ICRA), 2011 IEEE International Conference on. Shanghai, China:IEEE Press, 2011:4889-4895. [5] Ziegler J, Stiller C. Spatiotemporal state lattices for fast trajectory planning in dynamic on-road driving scenarios[C]//Intelligent Robots and Systems, 2009. IROS 2009. IEEE/RSJ International Conference on. IEEE Press, 2009:1879-1884. [6] Ma L, Xue J, Kawabata K, et al. Efficient sampling-based motion planning for on-road autonomous driving[J]. Intelligent Transportation Systems, IEEE Transactions on, 2015, 16(4):1961-1976. [7] Kuwata Y, Karaman S, Teo J, et al. Real-time motion planning with applications to autonomous urban driving[J]. Control Systems Technology, IEEE Transactions on, 2009, 17(5):1105-1118. [8] Lin C F, Juang J C, Li K R. Active collision avoidance system for steering control of autonomous vehicles[J]. Intelligent Transport Systems, IET, 2014, 8(6):550-557. [9] Papadimitriou I, Tomizuka M. Fast lane changing computations using polynomials[C]//American Control Conference, 2003. Proceedings of the 2003. Denver, CO, USA:IEEE Press, 2003:48-53 vol.1. [10] 付骁鑫, 江永亨, 黄德先, 等. 一种新的实时智能汽车轨迹规划方法[J]. 控制与决策, 2015, 30(10):1751-1758. FU Xiaoxin, Jiang Yongheng, Huang Dexian, et al. A novel real-time trajectory planning algorithm for intelligent vehicles[J]. Control and Decision, 2015, 30(10):1751-1758. (in Chinese) [11] Chen C, Lin J, Yücesan E, et al. Simulation budget allocation for further enhancing the efficiency of ordinal optimization[J]. Discrete Event Dynamic Systems, 2000, 10(3):251-270. [12] Ho Y, Zhao Q, Jia Q. Ordinal Optimization:Soft Optimization for Hard Problems[M]. New York:Springer US, 2007. [13] Bai L, Jiang Y, Huang D. A novel two-level optimization framework based on constrained ordinal optimization and evolutionary algorithms for scheduling of multipipeline crude oil blending[J]. Industrial & Engineering Chemistry Research, 2012, 51(26):9078-9093. |
相关文章:
|
